Способ адаптивного управления тягово-скоростными режимами движения автомобиля
Номер патента: 9786
Опубликовано: 30.10.2007
Авторы: Кудин Сергей Николаевич, Животов Максим Сергеевич, Пузанова Ольга Владимировна, Тарасик Владимир Петрович, Егоров Александр Николаевич, Якубов Евгений Николаевич, Горбатенко Николай Николаевич, Дычкин Иван Михайлович
Текст
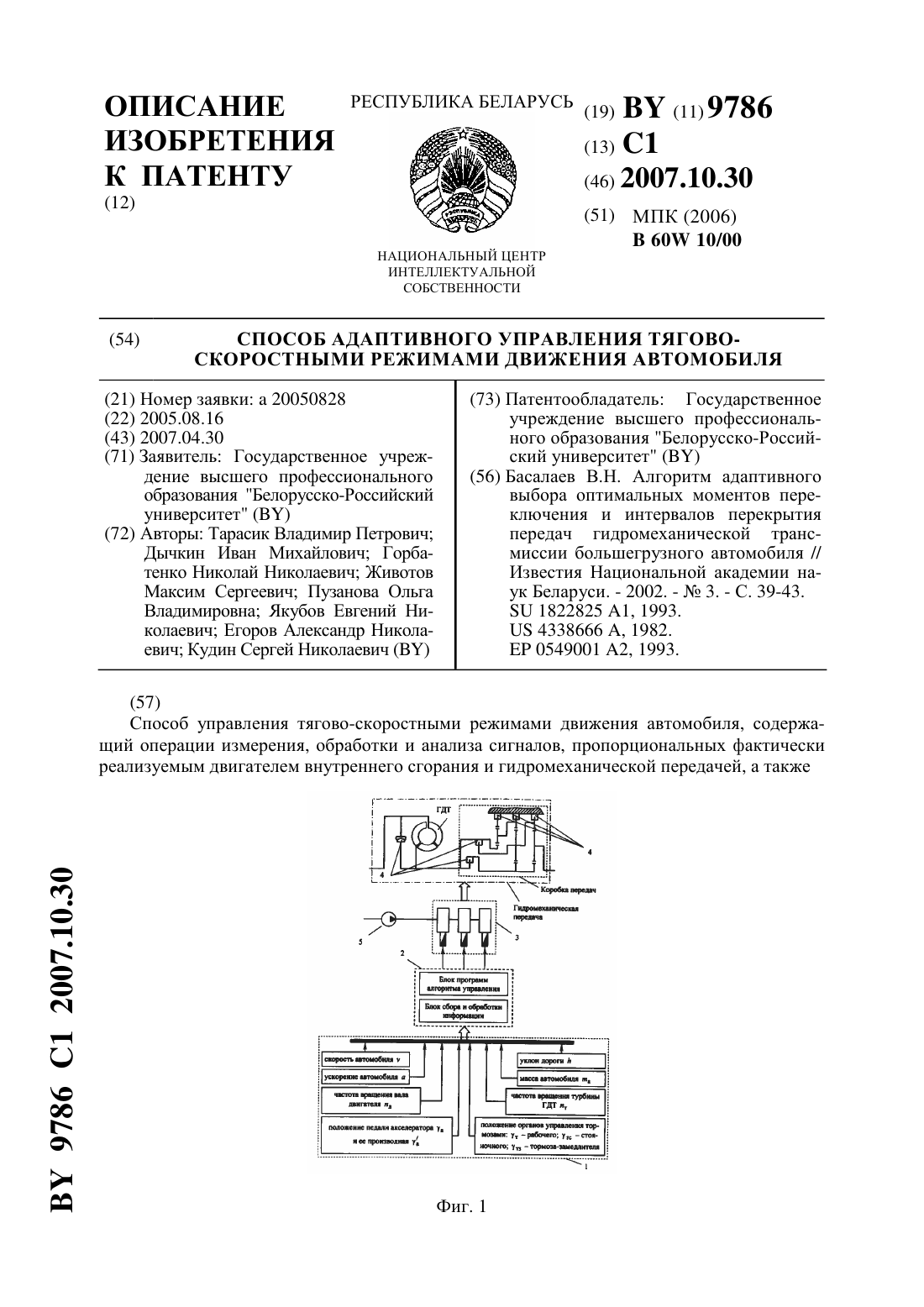
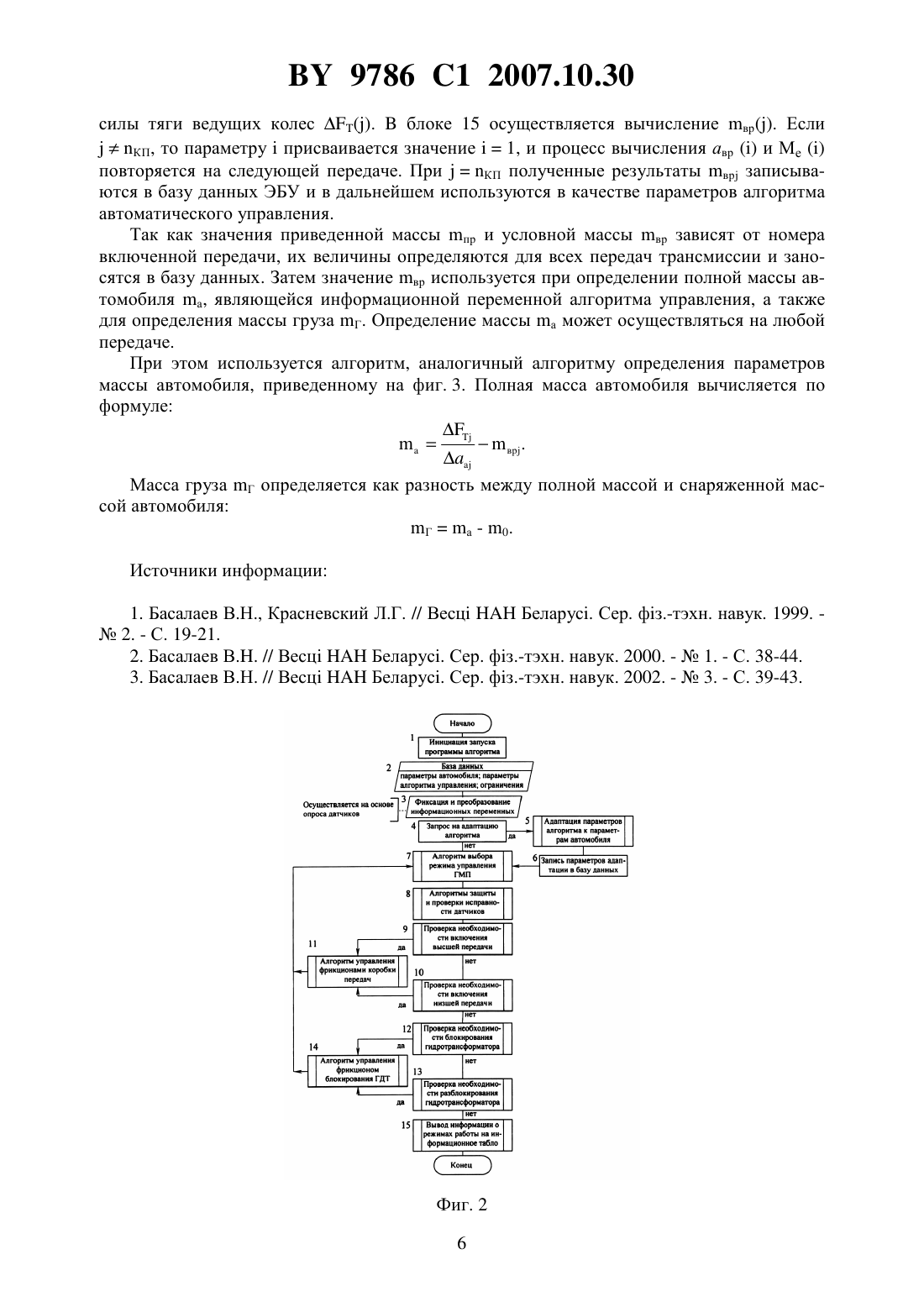
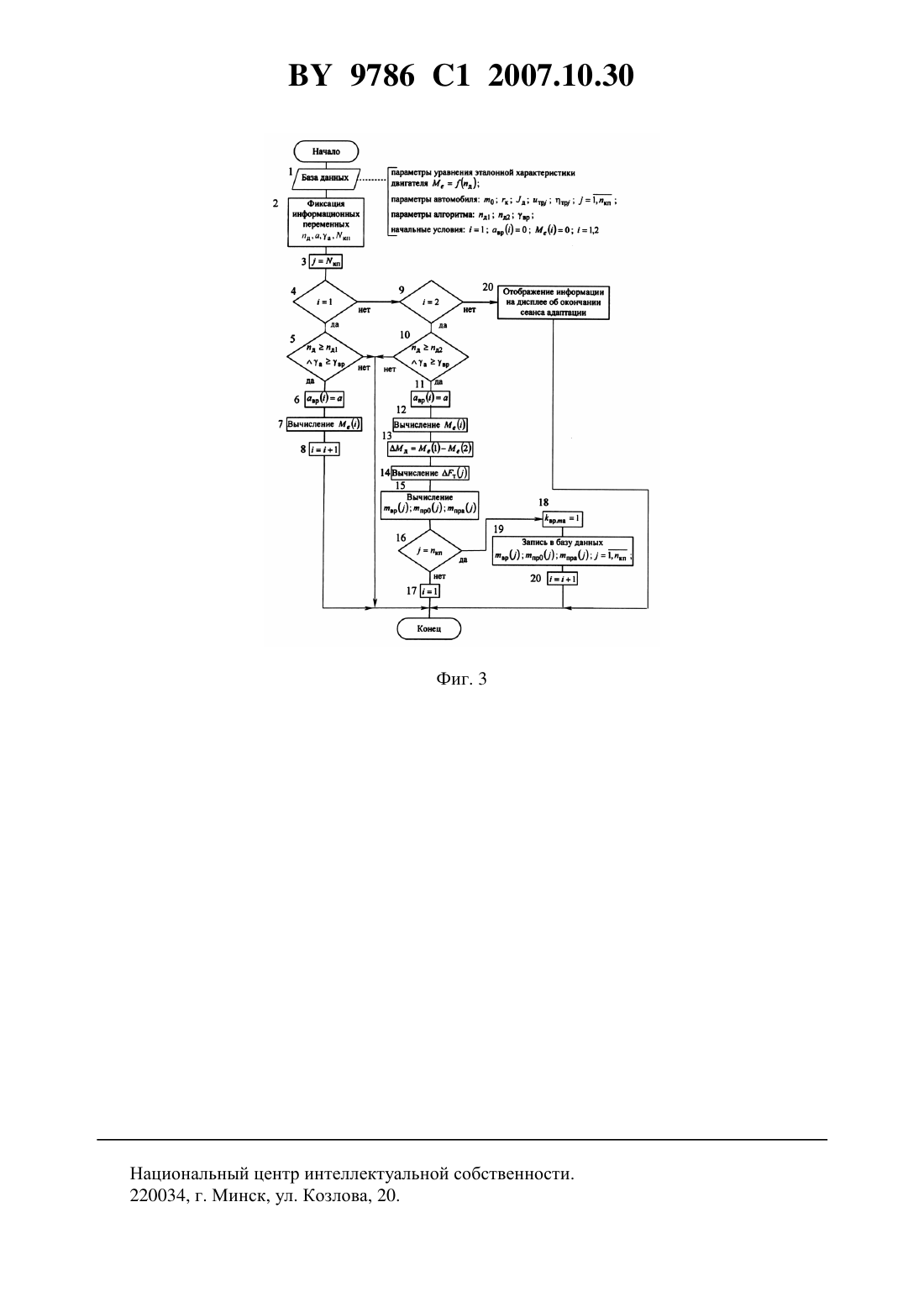
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ТЯГОВОСКОРОСТНЫМИ РЕЖИМАМИ ДВИЖЕНИЯ АВТОМОБИЛЯ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Дычкин Иван Михайлович Горбатенко Николай Николаевич Животов Максим Сергеевич Пузанова Ольга Владимировна Якубов Евгений Николаевич Егоров Александр Николаевич Кудин Сергей Николаевич(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(56) Басалаев В.Н. Алгоритм адаптивного выбора оптимальных моментов переключения и интервалов перекрытия передач гидромеханической трансмиссии большегрузного автомобиля // Известия Национальной академии наук Беларуси. - 2002. -3. - С. 39-43.1822825 1, 1993.4338666 , 1982.0549001 2, 1993.(57) Способ управления тягово-скоростными режимами движения автомобиля, содержащий операции измерения, обработки и анализа сигналов, пропорциональных фактически реализуемым двигателем внутреннего сгорания и гидромеханической передачей, а также 9786 1 2007.10.30 операции выработки управляющих сигналов и регулирования исполнительных механизмов автомобиля, отличающийся тем, что осуществляют пробег снаряженного автомобиля с заблокированным гидротрансформатором на горизонтальном участке дороги с постоянным коэффициентом сопротивления качению при отсутствии помех движению и при полностью нажатой педали подачи топлива, при этом посредством электронного блока системы управления, включенного в режиме адаптации, на основе эталонной характеристики двигателя, хранящейся в базе данных, и полученных значений ускорений для двух частот вращения вала двигателя на внешней скоростной характеристике определяют в автоматическом режиме в соответствии с алгоритмом адаптации значение приведенной массы автомобиля, разгон которой эквивалентен разгону суммы поступательно движущихся масс и условной дополнительной массы по полученному значению приведенной массы и известному значению снаряженной массы определяют значение условной дополнительной массы автомобиля, разгон которой эквивалентен разгону вращающихся деталей двигателя, трансмиссии и колес автомобиля, причем значение условной дополнительной массы определяют для всех передач трансмиссии с занесением этих значений в базу данных электронного блока системы управления для последующего использования в программе управления переключением передач и блокировкой гидротрансформатора. Изобретение относится к области автомобилестроения и может быть использовано при создании перспективных систем управления тягово-скоростными режимами движения автомобиля. В известном способе адаптивного управления гидромеханической трансмиссией большегрузного автомобиля 1 при движении его по реальному маршруту через определенные интервалы времени производится расчет на бортовой ЭВМ силы сопротивления движению, массы автомобиля, режима работы двигателя и гидротрансформатора на основе информации, поступающей с датчиков угловой скорости двигателя, входного и выходного валов гидромеханической трансмиссии. В результате обработки этой информации на ЭВМ находятся угловые скорости и ускорения вала двигателя, насосного и турбинного колес гидротрансформатора. При движении автомобиля с разблокированным гидротрансформатором для следующих с некоторым временным интервалом точек определяются ускорения автомобиля. Из характеристик гидротрансформатора вычисляются вращающие моменты насосного и турбинного колес, для упомянутых точек определяются тяговые усилия на ведущих колесах автомобиля, рассчитываются силы сопротивления движению на основании заранее известных данных о моментах инерции вращающихся масс двигателя, трансмиссии и колес автомобиля, передаточного числа и коэффициента полезного действия трансмиссии рассчитываются силы инерции, возникающие при разгоне вращающихся масс, и определяется полная масса автомобиля. При отсутствии данных о величинах моментов инерции вращающихся частей двигателя, гидротрансформатора, трансмиссии и колес автомобиля,а также данных о параметрах скоростной характеристики двигателя реализация этого способа невозможна. В известном способе адаптивного выбора оптимальных моментов переключения передач гидромеханической трансмиссии 2 определение параметров массы автомобиля и характеристик дорожных условий осуществляется также при движении автомобиля с разблокированным гидротрансформатором на основе заложенных в память ЭВМ известных эталонных характеристик двигателя, гидротрансформатора и моментов инерции вращающихся частей двигателя, гидротрансформатора, трансмиссии и колес автомобиля. При этом уточняется реальный вращающий момент двигателя и рассчитывается коэффициент его изменения в процессе эксплуатации. 2 9786 1 2007.10.30 Наиболее близким к предлагаемому является способ адаптивного выбора оптимальных моментов переключения и интервалов перекрытия передач гидромеханической трансмиссии большегрузного автомобиля, осуществляемый в соответствии со специальным алгоритмом, учитывающим в качестве комплексного показателя соотношение развиваемого в процессе движения ускорения автомобиля и его связь с характеристиками объекта управления и среды 3. В процессе осуществления этого способа параметры вращающих моментов двигателя для следующих с некоторым временным интервалом точек определяются по его характеристике в зависимости от угловых скоростей вращения вала и нагрузки двигателя. С учетом возможного снижения в процессе эксплуатации мощности двигателя на величину до 20 периодически во время движения автомобиля с разблокированным гидротрансформатором определяется реальный вращающий момент двигателя, одно из его значений сравнивается с величиной вращающего момента, заданной в компьютере, и определяется коэффициент изменения вращающего момента, произошедшего в процессе эксплуатации автомобиля. Все значения вращающего момента, заданные в компьютере, в случае их изменения корректируются путем умножения на полученный коэффициент изменения вращающего момента, что позволяет системе адаптироваться к упомянутым изменениям. Для необходимых расчетов этот способ предусматривает заданную в компьютере характеристику гидротрансформатора, активный диаметр гидротрансформатора, плотность рабочей жидкости, а также моменты инерции вращающихся деталей двигателя, колес гидротрансформатора, трансмиссии и колес автомобиля. Необходимость предварительного получения для внесения в компьютер кроме эталонной характеристики двигателя также и дополнительных данных о моментах инерции вращающихся деталей и полученных заранее характеристик гидротрансформатора существенно ограничивают возможность применения этого способа. К тому же существенные отклонения параметров характеристик гидротрансформатора, как результат применяемой технологии изготовления его колес литьем, снижают точность получаемых по этому способу результатов адаптации и соответственно эксплуатационных качеств автомобиля, тягово-скоростные показатели которого управляются с применением такого способа адаптации. Временной интервал считывания информации с датчиков небольшой. В связи с изменением дорожных условий скорость автомобиля может измениться незначительно. Скорость автомобиля определяется на основе информации, получаемой с датчика частоты вращения выходного вала трансмиссии. Сигнал этого датчика сопровождается инструментальной ошибкой, на которую накладывается также ошибка обработки информации, в результате чего при малом изменении скорости значение определяемого ускорения автомобиля указанным способом может иметь значительную ошибку, существенно искажающую определение других информационных переменных и снижающую эффективность алгоритма управления. Задачей, решаемой изобретением, является создание способа адаптивного управления тягово-скоростными режимами автомобиля, повышающего его эксплуатационные свойства производительность, экономичность, комфортабельность управления, надежность. Одной из задач является также обеспечение возможности восполнения некоторых отсутствующих и уточнение изменяющихся в процессе эксплуатации параметров объекта управления и внешней среды, необходимых для внесения в базу данных системы управления. Поставленная задача решается тем, что в способе адаптивного управления тяговоскоростными режимами движения автомобиля, содержащем операции измерения, обработки и анализа сигналов, пропорциональных фактически реализуемым двигателем внутреннего сгорания и гидромеханической передачей, а также операции выработки управляющих сигналов и регулирования исполнительных механизмов автомобиля, согласно изобретению, осуществляют пробег снаряженного автомобиля с заблокированным 3 9786 1 2007.10.30 гидротрансформатором на горизонтальном участке дороги с постоянным коэффициентом сопротивления качению при отсутствии помех движению и при полностью нажатой педали подачи топлива, при этом посредством электронного блока системы управления, включенного в режиме адаптации, на основе эталонной характеристики двигателя, хранящейся в базе данных, и полученных значений ускорений для двух частот вращения вала двигателя на внешней скоростной характеристике определяют в автоматическом режиме в соответствии с алгоритмом адаптации значение приведенной массы автомобиля, разгон которой эквивалентен разгону суммы поступательно движущихся масс и условной дополнительной массы по полученному значению приведенной массы и известному значению снаряженной массы определяют значение условной дополнительной массы автомобиля,разгон которой эквивалентен разгону вращающихся деталей двигателя, трансмиссии и колес автомобиля, причем значение условной дополнительной массы определяют для всех передач трансмиссии с занесением этих значений в базу данных электронного блока системы управления для последующего использования в программе управления переключением передач и блокировкой гидротрансформатора. Характеристики и параметры управления определяются из условия обеспечения заданных показателей эффективности работы автомобиля, надежности функционирования,комфортабельности и безопасности работы. Реализация управления тягово-скоростными режимами движения автомобиля осуществляется системой автоматического управления,функционирование которой определяется специальными алгоритмами. Сущность изобретения поясняется чертежами. На фиг. 1 приведена структурная схема системы управления гидромеханической передачей на фиг. 2 - схема алгоритма формирования сигналов управления на фиг. 3 - схема алгоритма определения параметров массы автомобиля. Система автоматизированного управления гидромеханической передачей (САУ ГМП) автомобиля состоит из следующих элементов (фиг. 1) системы датчиков 1 для сбора информации электронного блока управления (ЭБУ) 2 исполнительных механизмов 3 САУ ГМП гидравлических цилиндров 4 включения фрикционов источника рабочей жидкости под давлением 5 системы гидропривода включения фрикционов и регуляторов давления в этой системе. Формирование сигналов управления осуществляется в электронном блоке управления(ЭБУ), а формирование управляющих воздействий на фрикционы ГМП - в исполнительных механизмах САУ. Исполнительные механизмы выполнены в виде трехкаскадных электрогидравлических усилителей. Они усиливают сигналы ЭБУ и формируют гидравлические управляющие воздействия. Сигналы управления, формируемые в ЭБУ, представляют собой электрические широтно-импульсные сигналы, несущие информацию о необходимых характеристиках регулирования параметров потоков - давлений и расходов рабочей жидкости, поступающей в гидроцилиндры в процессе включения фрикционов. Алгоритм управления, обеспечивающий оптимальные показатели тягово-скоростных свойств и топливной экономичности автомобиля, разработан с учетом возможности осуществления запроса на адаптацию и записи параметров адаптации в базу данных. Схема алгоритма формирования сигналов управления на переключение передач и блокирование гидротрансформатора приведена на фиг. 2. Она содержит следующие блоки инициации запуска программы алгоритма - блок 1 базы данных - блок 2 фиксации и преобразования информационных переменных - блок 3 запроса на адаптацию алгоритма - блок 4 вычислительных операций - блок 5 логических операций - блоки 7, 8, 9, 10, 12 и 13 операций формирования сигналов управления на переключение передач и блокирование гидротрансформатора - блоки 11 и 14 индикации и отображения информации - блок 15. После пуска двигателя включается питание ЭБУ и запускается программа алгоритма управления. При запуске программы на выполнение база данных загружается в оперативную память микропроцессора. В базе данных хранятся параметры характеристик управле 4 9786 1 2007.10.30 ния, эталонной характеристики двигателя, трансмиссии, колес автомобиля и параметры ограничений, используемые при реализации алгоритма управления. Состояние системы управления ГМП отображается на информационном табло. В каждом цикле отработки программы путем опроса датчиков осуществляется фиксация информационных переменных, блок 3 фиг. 2 координаты положения педали акселератора а частоты вращения вала двигателя частоты вращения турбины гидротрансформатора частоты вращения выходного вала коробки передач скорости автомобиля положения педали рабочей тормозной системы положения рычага стояночного тормоза положения органа включения тормоза-замедлителя полной массы автомобиля температуры масла гидромеханической передачи номера включенной передачи индикатора состояния механизма блокирования гидротрансформатора. Для обеспечения высокой эффективности САУ ГМП осуществляется согласование параметров алгоритма управления с параметрами объекта управления. С этой целью в электронном блоке управления предусмотрены программы определения параметров и характеристик автомобиля и адаптации к ним параметров алгоритма автоматического управления. Для этого предназначены блоки 5 и 6, фиг. 2. Назначение остальных блоков на фиг. 2 соответствует их названию. Для адаптации автоматической системы управления тягово-скоростными режимами автомобиля осуществляется пробег снаряженного автомобиля, масса которого равна 0, с блокированным гидротрансформатором, на горизонтальном участке дороги с постоянным коэффициентом сопротивления качению при отсутствии транспортных и иных помех движению. В процессе пробега определяется приведенная масса автомобиля пр - условная масса, разгон которой эквивалентен разгону суммы поступательно движущихся масс 0 и дополнительной массы вр, разгон которой эквивалентен разгону вращающихся деталей двигателя, трансмиссии и колес автомобиля. При этом для двух частот вращения вала двигателя на его внешней скоростной характеристике Д 1 и Д 2 определяются ускорения автомобиля, соответственно а 1 и 2. Затем определяется приращение ускорения , и из заложенных в базу данных о параметрах эталонной внешней скоростной характеристики двигателя определяется приращение вращающего момента двигателя МД, которое с учетом передаточного числа тр и КПД тр трансмиссии на выбранной -й передаче трансмиссии эквивалентно приращению силы тягина ведущих колесах, за счет которого получено приращение ускоренияавтомобиля. Приращение ускорениясвязано с показателями масс автомобиля уравнением пр 00 вр . 0 На основании полученного в результате значения приведенной массы снаряженного автомобиля пр 0 и известного из паспортных данных автомобиля значения его снаряженной массы 0 определяется условная дополнительная масса вр для каждой -й передачи трансмиссии врпр 0 - 0. На фиг. 3 приведена схема алгоритма определения параметров масс автомобиля. При запуске программы параметруприсваивается значение 1. В блоке 3 параметруприсваивается значение, равное номеру передачи КП. При 1 проверяется выполнение условия дд 1 и авр. Если это условие выполняется, то в блоке 6 переменной вр(1) присваивается текущее значение ускорения а, а в блоке 7 производится вычисление момента двигателя Ме(1), соответствующее зафиксированному текущему значению д. В блоке 8 параметрувеличивается на единицу. При 2 и выполнении условия дд 2 и авр в блоке 11 переменной вр (2) присваивается второе текущее значение ускорения автомобиля, а в блоке 12 вычисляется Ме(2). Далее в блоке 13 вычисляется приращение момента МД, а в блоке 14 - приращение 5 9786 1 2007.10.30 силы тяги ведущих колес .блоке 15 осуществляется вычисление вр. ЕслиКП, то параметруприсваивается значение 1, и процесс вычисления аври Меповторяется на следующей передаче. ПриКП полученные результаты вр записываются в базу данных ЭБУ и в дальнейшем используются в качестве параметров алгоритма автоматического управления. Так как значения приведенной массы пр и условной массы вр зависят от номера включенной передачи, их величины определяются для всех передач трансмиссии и заносятся в базу данных. Затем значение вр используется при определении полной массы автомобиля а, являющейся информационной переменной алгоритма управления, а также для определения массы груза Г. Определение массы а может осуществляться на любой передаче. При этом используется алгоритм, аналогичный алгоритму определения параметров массы автомобиля, приведенному на фиг. 3. Полная масса автомобиля вычисляется по формуле Масса груза Г определяется как разность между полной массой и снаряженной массой автомобиля Га - 0 . Источники информации 1. Басалаев В.Н., Красневский Л.Г. // ВесцБеларус. Сер. фз.-тэхн. навук. 1999.2. - С. 19-21. 2. Басалаев В // ВесцБеларус. Сер. фз.-тэхн. навук. 2000. -1. - С. 38-44. 3. Басалаев В.Н. // ВесцБеларус. Сер. фз.-тэхн. навук. 2002. -3. - С. 39-43. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: B60W 10/00
Метки: способ, режимами, тягово-скоростными, движения, адаптивного, автомобиля, управления
Код ссылки
<a href="https://by.patents.su/7-9786-sposob-adaptivnogo-upravleniya-tyagovo-skorostnymi-rezhimami-dvizheniya-avtomobilya.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивного управления тягово-скоростными режимами движения автомобиля</a>
Способ адаптивного управления тягово-скоростными режимами движения мобильного средства
Номер патента: 9706
Опубликовано: 30.08.2007
Авторы: Пузанова Ольга Владимировна, Абди Павел Хассенович, Животов Максим Сергеевич, Тарасик Владимир Петрович, Дычкин Иван Михайлович
МПК: B60W 10/00
Метки: движения, тягово-скоростными, способ, мобильного, адаптивного, режимами, средства, управления
Текст:
...поправку координаты положения педали подачи топлива, по которой корректируют значение координаты положения полностью нажатой педали подачи топлива, после выполнения алгоритма адаптации отображают на информационном табло блока индикации информацию о полученных скорректированных значениях упомянутых параметров, характеризующих внешнюю скоростную и предельную регуляторную характеристики двигателя с занесением этих параметров в базу данных...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7276
Опубликовано: 30.09.2005
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: адаптивного, режимами, средства, автотранспортного, способ, энергетическими, управления
Текст:
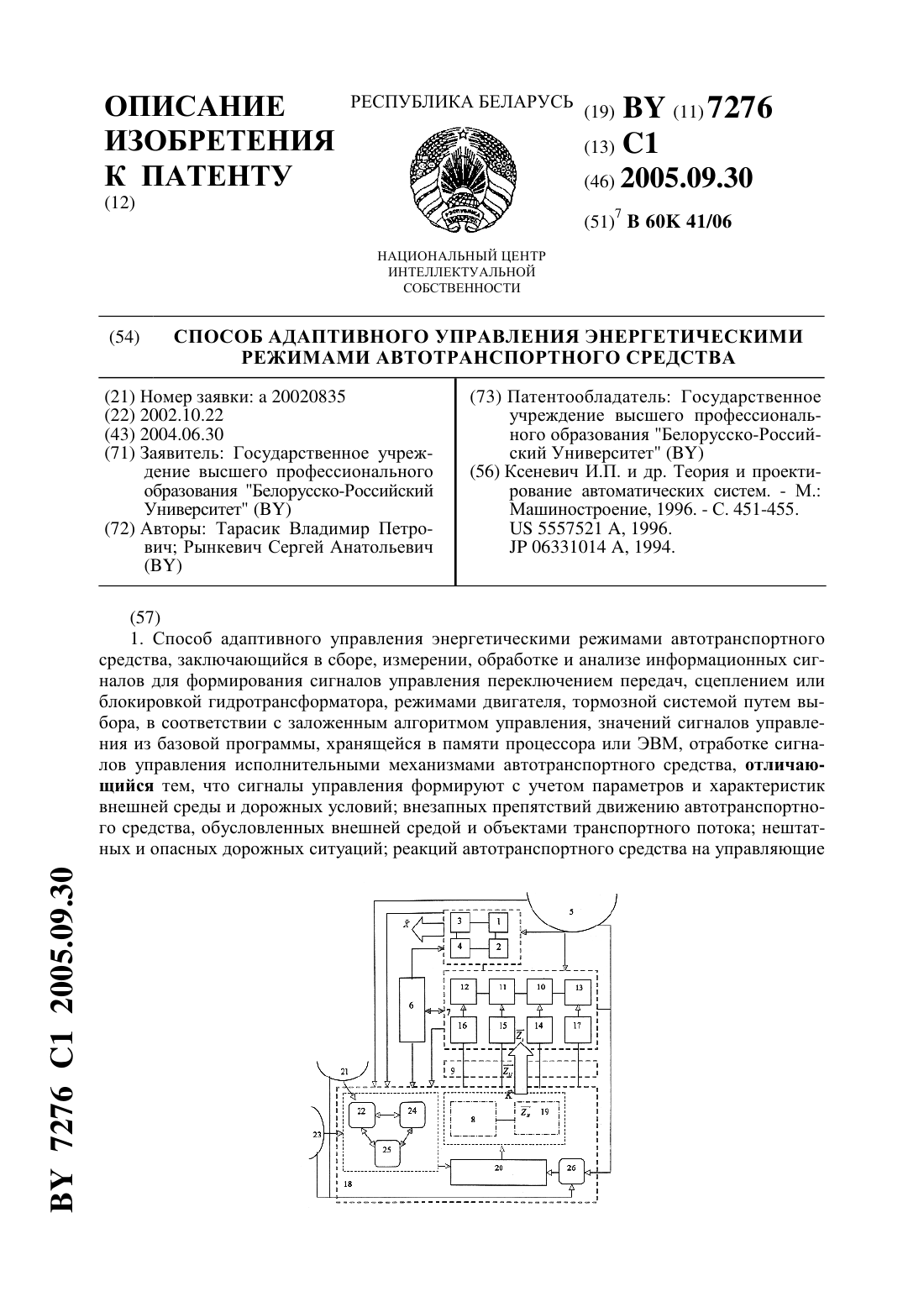
...движению автотранспортного средства, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций реакций автотранспортного средства на управляющие воздействия параметров скоростных режимов движения автотранспортного средства особенностей управления автотранспортным средством, обусловленных стилем, навыками вождения и квалификацией водителя уровня загрузки автотранспортного средства допустимых...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7330
Опубликовано: 30.09.2005
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: средства, энергетическими, режимами, управления, автотранспортного, адаптивного, способ
Текст:
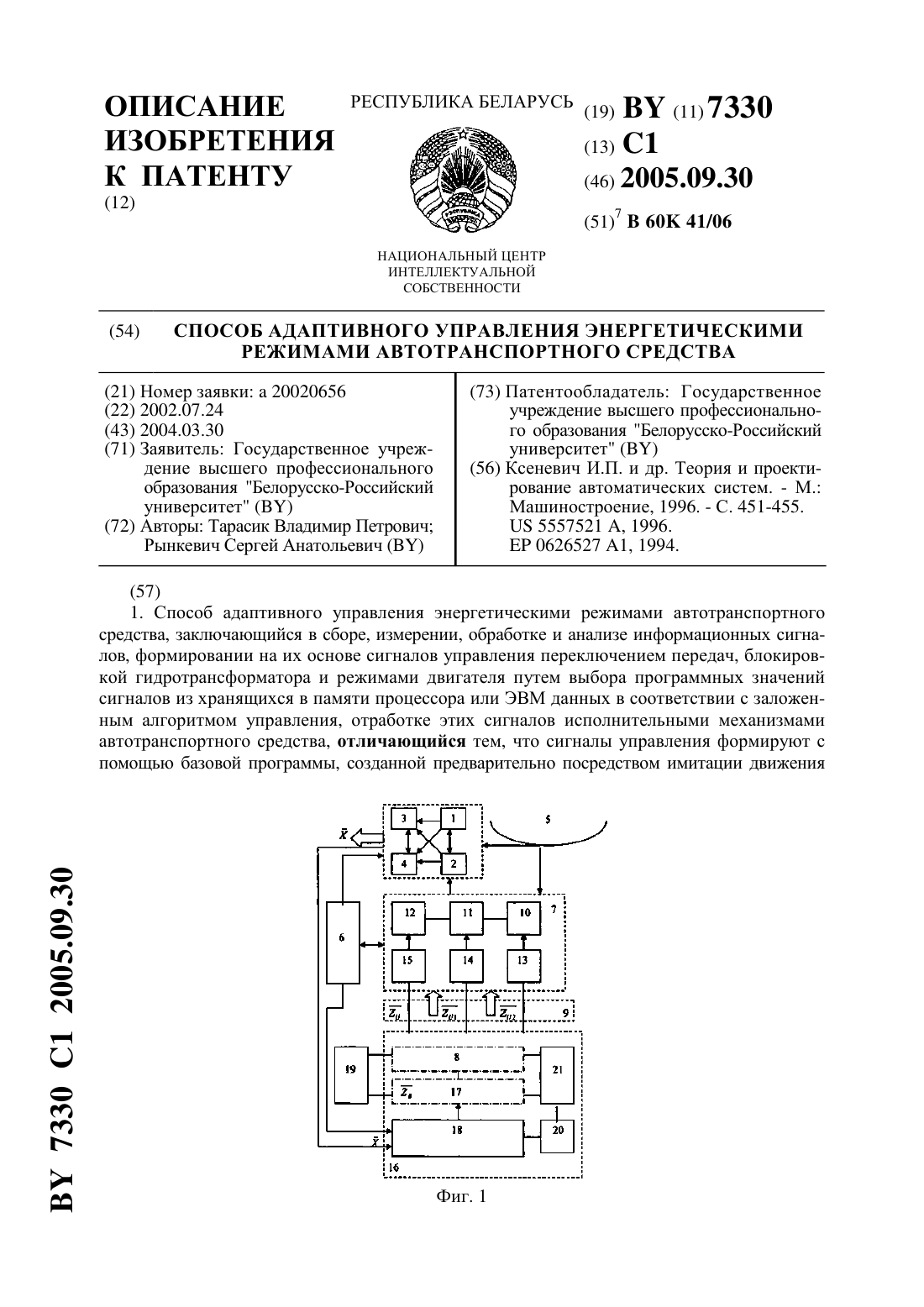
...зависимостей параметров характеристик базовой программы управле 4 7330 1 2005.09.30 ния от параметров автомобиля, внешней среды и управляющих воздействий водителя корреляционный анализ зависимостей параметров характеристик базовой программы от параметров автомобиля, внешней среды и управляющих воздействий водителя и выбор дополнительных информационных переменных, необходимых для адаптации базовой программы регрессионный анализ результатов...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович, Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич
МПК: B65K 41/00
Метки: управления, система, адаптивного, режимами, энергетическими, машины, мобильной, интеллектуального
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Способ интеллектуального управления энергетическими режимами мобильной машины
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: энергетическими, режимами, мобильной, способ, управления, машины, интеллектуального
Текст:
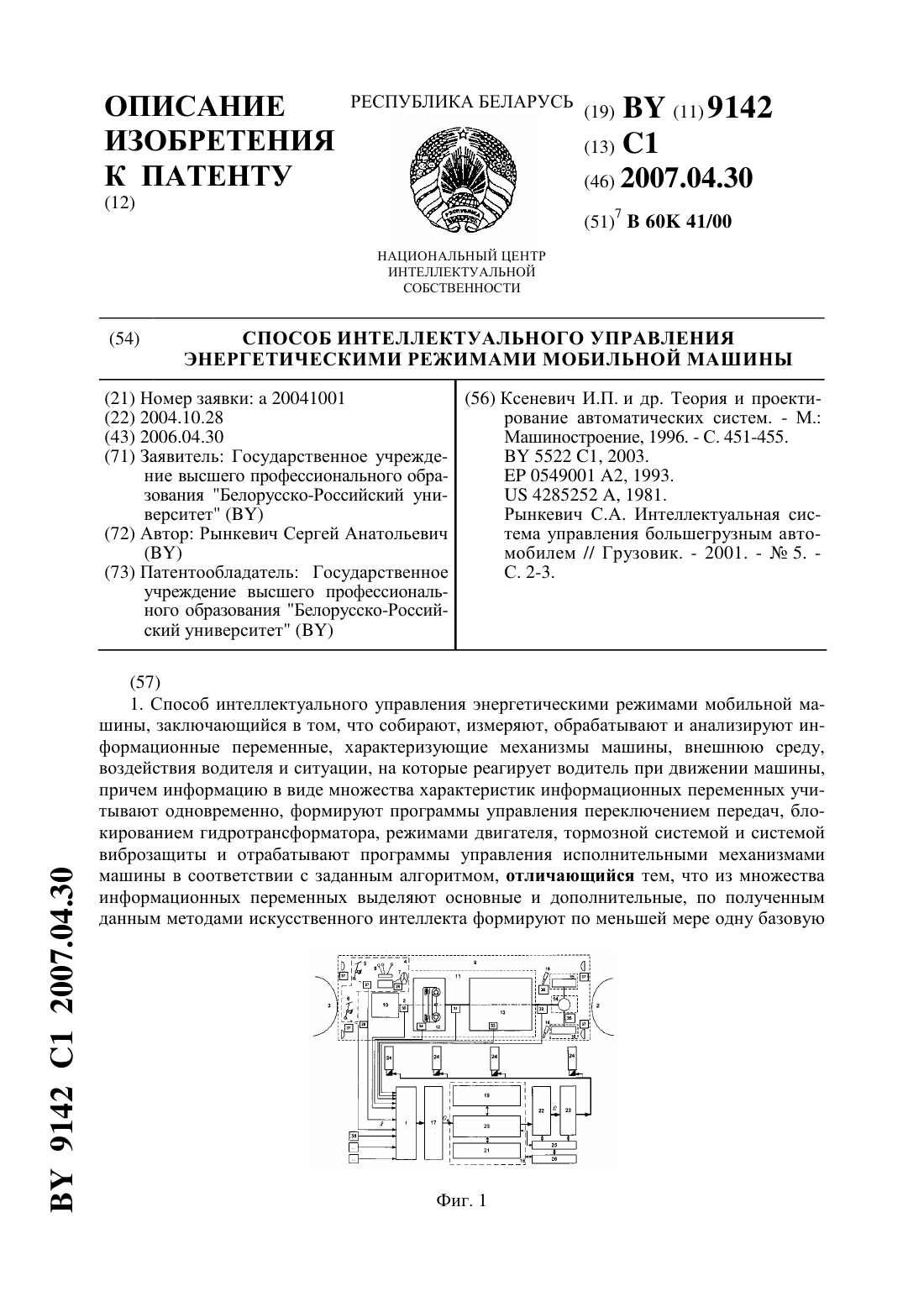
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Предыдущий патент: Способ получения пористого материала, преимущественно для фильтрующих элементов
Следующий патент: Трансформатор на основе длинной линии
Случайный патент: Способ оценки эффективности ходовых систем колесных машин