Способ адаптивного управления тягово-скоростными режимами движения мобильного средства
Номер патента: 9706
Опубликовано: 30.08.2007
Авторы: Абди Павел Хассенович, Дычкин Иван Михайлович, Тарасик Владимир Петрович, Животов Максим Сергеевич, Пузанова Ольга Владимировна
Текст
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ТЯГОВО-СКОРОСТНЫМИ РЕЖИМАМИ ДВИЖЕНИЯ МОБИЛЬНОГО СРЕДСТВА(71) Заявители Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Дычкин Иван Михайлович Пузанова Ольга Владимировна Животов Максим Сергеевич Абди Павел Хассенович(73) Патентообладатели Государственное учреждение высшего профессионального образования Белорусско-Российский университет(56) Басалаев В.Н. Алгоритм адаптивного выбора оптимальных моментов переключения и интервалов перекрытия передач гидромеханической трансмиссии большегрузного автомобиля // Известия Национальной академии наук Беларуси. - 2002. - С. 39-43.2180757 1, 2002.0549001 2, 1993.4223253 1, 1994.57022918 , 1982.59197658 , 1984.95/34437 1.0339662 2, 1989.10254392 1, 2004.(57) Способ адаптивного управления тягово-скоростными режимами движения мобильного средства, содержащий операции измерения, обработки и анализа сигналов, пропорциональных 9706 1 2007.08.30 фактически реализуемым двигателем внутреннего сгорания и гидромеханической передачей, а также операции регулирования исполнительных механизмов мобильного средства,отличающийся тем, что до применения мобильного средства по прямому назначению,после предварительного прогрева двигателя осуществляют разгон и движение мобильного средства при заблокированном гидротрансформаторе на горизонтальном участке дороги при отсутствии помех движению, пробег мобильного средства осуществляют в командном режиме управления на одной из высших передач трансмиссии при полностью нажатой педали подачи топлива до получения максимально достижимой при данных условиях скорости, при этом посредством электронного блока системы управления, включенного в режиме адаптации, определяют в автоматическом режиме в соответствии с алгоритмом адаптации значения действительной частоты вращения вала двигателя, мгновенного расхода топлива и вращающего момента двигателя при максимальной мощности последнего,по полученным значениям действительной частоты вращения вала двигателя и вращающего момента последнего вычисляют максимальную мощность двигателя, а по значению его мгновенного расхода топлива и максимальной мощности - удельный расход топлива двигателя, вычисляют поправку координаты положения педали подачи топлива, по которой корректируют значение координаты положения полностью нажатой педали подачи топлива, после выполнения алгоритма адаптации отображают на информационном табло блока индикации информацию о полученных скорректированных значениях упомянутых параметров, характеризующих внешнюю скоростную и предельную регуляторную характеристики двигателя с занесением этих параметров в базу данных электронного блока системы управления для последующего использования в программе управления переключением передач и блокировкой гидротрансформатора, а также последующей диагностики двигателя по изменению упомянутых параметров. Изобретение относится к области автотракторостроения и может быть использовано при создании перспективных систем управления тягово-скоростными режимами движения мобильных машин, обеспечивая им высокие технико-экономические показатели, повышение надежности и комфортности работы. В известном адаптивном методе управления автоматической трансмиссией при подаче команды на клапан гидромуфты электронным устройством определяется время ее включения, сравнивается с заданным, и выявленная разница используется для корректировки последующих параметров переключения 1. Недостатком способа является заранее заданное значение времени включения муфты без учета отклонений мощностных параметров двигателя от эталонных. В известном методе управления гидроцилиндром фрикциона многоступенчатой гидромеханической передачи электронно-гидравлическая система управления использует сигналы, поступающие с датчиков скорости входного, выходного и турбинного валов, для определения и корректировки времени наполнения гидроцилиндра фрикциона 2. Метод решает частную задачу определения времени наполнения при известных заранее характеристиках двигателя, при изменении которых в процессе эксплуатации возможно снижение точности процесса управления. Известно также решение, в котором информационные запросы к мощности двигателя определяются в зависимости от времени впрыска топлива с учетом частоты вращения вала двигателя 3. По мере износа цилиндропоршневой группы двигателя такой метод снижает точность данных, что является недостатком способа. В системе переключения передачв качестве датчика нагрузки двигателя служит потенциометр, передающий сигнал о положении педали подачи топлива, которому соответствуют определенные параметры эталонной характеристики двигателя. Недостатком способа является некорректируемое по мере изменения мощностных параметров дви 2 9706 1 2007.08.30 гателя соотношение этих параметров с положением педали подачи топлива, ведущее к появлению рассогласования между положением педали и параметрами характеристик двигателя 4. Отклонение параметров действительных характеристик двигателя от эталонных, которое свойственно не только израсходовавшим часть своего ресурса, но и новым двигателям,влияет на функцию параметрической чувствительности электронной системы управления. Современные мехатронные системы управления трансмиссией должны обеспечивать допуск на отклонение скорости движения от оптимального значения при переключении передач в пределах одного процента. Этим определяются высокие требования к точности параметров, запрашиваемых из базы данных системой управления для оценки ситуации,выработки решения и реализации алгоритма управления. Это требование относится, прежде всего, к параметрам внешней скоростной и предельной регуляторной характеристик двигателя, которые первоначально введены в базу данных соответственно эталонной характеристике. Компенсировать несовпадение параметров действительных и эталонных характеристик изменением программы управления нецелесообразно и не всегда возможно в реальном масштабе времени. Наиболее близким к предлагаемому способу является известный способ адаптивного управления гидромеханической трансмиссией большегрузного автомобиля, при котором на входы компьютера должна поступать информация о скоростных, силовых и некоторых других параметрах автомобиля 5. Вращающие моменты двигателя для следующих с некоторым временным интервалом точек определяются по его характеристике в зависимости от угловых скоростей вращения и нагрузки двигателя. С учетом возможного снижения в процессе эксплуатации мощности двигателя до 20 , периодически во время движения автомобиля с разблокированным гидротрансформатором определяется реальный вращающий момент двигателя, одно из его значений сравнивается с величиной вращающего момента, заданной в компьютере, и определяется коэффициент изменения вращающего момента двигателя в процессе эксплуатации автомобиля. Все значения вращающего момента, заданные в компьютере, в случае их изменения, корректируются путем умножения на полученный коэффициент изменения вращающего момента, что позволяет системе адаптироваться к упомянутым изменениям. Для различных вычислений данный способ предусматривает заданную в компьютере характеристику гидротрансформатора, активный диаметр гидротрансформатора,плотность рабочей жидкости, а также моменты инерции двигателя, насосного и турбинного колес гидротрансформатора. Основной недостаток способа - необходимость предварительного получения для внесения в компьютер помимо эталонной характеристики двигателя также и дополнительно данных о моментах инерции двигателя, насосного и турбинного колес, чего нельзя сделать без разборки агрегатов, а также характеристики гидротрансформатора, получение которой требует стендовых испытаний причем обычно технология изготовления деталей гидротрансформатора дает большой разброс параметров этих характеристик, снижая результат адаптации по рассмотренному способу и возможности его применения. Задачей, решаемой изобретением, является создание способа адаптивного управления тягово-скоростными режимами мобильного средства, повышающего его эксплуатационные качества производительность, экономичность, комфортабельность управления, надежность. Одной из задач является также снижение требований к числу и трудоемкости получения предварительных характеристик узлов и систем транспортного средства для их внесения в компьютер системы управления. Поставленная задача решается тем, что в способе адаптивного управления тяговоскоростными режимами движения мобильного средства, содержащем операции измерения, обработки и анализа сигналов, пропорциональных фактически реализуемым двигателем внутреннего сгорания и гидромеханической передачей, а также операции регулирования исполнительных механизмов мобильного средства, согласно изобретению, до приме 3 9706 1 2007.08.30 нения мобильного средства по прямому назначению после предварительного прогрева двигателя осуществляют разгон и движение мобильного средства при заблокированном гидротрансформаторе на горизонтальном участке дороги при отсутствии помех движению, пробег мобильного средства осуществляют в командном режиме управления на одной из высших передач трансмиссии при полностью нажатой педали подачи топлива до получения максимально достижимой при данных условиях скорости, при этом посредством электронного блока системы управления, включенного в режиме адаптации, определяют в автоматическом режиме в соответствии с алгоритмом адаптации значение действительной частоты вращения вала двигателя, мгновенного расхода топлива и вращающего момента двигателя при максимальной мощности последнего, по полученным значениям действительной частоты вращения вала двигателя и вращающего момента последнего вычисляют максимальную мощность двигателя, а по значению его мгновенного расхода топлива и максимальной мощности - удельный расход топлива двигателя, вычисляют поправку координаты положения педали подачи топлива, по которой корректируют значение координаты положения полностью нажатой педали подачи топлива, после выполнения алгоритма адаптации отображают на информационном табло блока индикации информацию о полученных скорректированных значениях упомянутых параметров, характеризующих внешнюю скоростную и предельную регуляторную характеристики двигателя с занесением этих параметров в базу данных электронного блока системы управления для последующего использования в программе управления переключением передач и блокировкой гидротрансформатора, а также последующей диагностики двигателя по изменению упомянутых параметров. Предложенный способ иллюстрируется фигурой, на которой приведена схема алгоритма адаптации. Сущность предлагаемого способа адаптации заключается в следующем. При предварительно прогретом двигателе осуществляется разгон и пробег транспортного средства при блокированном гидротрансформаторе на горизонтальном участке дороги без транспортных и иных помех на одной из высших передач трансмиссии при положении полностью нажатой педали подачи топлива, обозначаемом как а 1, до получения максимально достижимой на данной передаче в данных условиях скорости. При этом в электронной системе управления включается режим адаптации блока системы автоматического управления, определяющий в автоматическом режиме искомые параметры внешней и предельной регуляторной характеристик двигателя частоту вращения вала двигателя, соот ветствующую максимальной мощностимгновенный расход топливапри частоте вращения вала двигателя, вращающий момент двигателяпри частоте. Учитыва ется, что максимальная мощностьсоответствует точке пересечения внешней скоростной характеристики двигателя с предельной регуляторной характеристикой двигателя. На основе полученных таким образом параметров,иэлектронным блоком рассчитываются по известным зависимостям максимальная мощность двигателя, удельный расход топливапри максимальной мощностии поправка координаты педали подачи топлива а в относительных безразмерных единицах. Скорректированное значение координаты положения полностью нажатой педали подачи топлива определяется по формуле Схема алгоритма адаптации, положенного в основу программы электронного блока автоматической системы управления, приведена на фигуре. При запуске алгоритма адаптации обнуляются параметры, используемые в вычислениях, и считываются из базы данных электронного блока автоматической системы управ 4 9706 1 2007.08.30 ления исходные параметры эталонных характеристик двигателяЭ ,Э , а также порого вые значения параметров д 0, 0,, 0, где д 0 - пороговое значение частоты вращения вала двигателя, при котором выполняются процедуры блоков 5-13 алгоритма адаптации д 0 - шаг изменения частоты вращения вала двигателя при фиксации параметров- пороговое значение коэффициента наклона регуляторных ветвей характеристики двигателя 0 - пороговое значение текущего расхода топлива, соответствующее д 0. Алгоритм выполняется циклически с интервалом, например, ц 0,01 с. В каждом циклесчитывается полученная с датчиков информация о частоте вращения двигателя д и о мгновенном расходе топлива . Кроме того, проверяется выполнение условия а 1 полного нажатия педали подачи топлива. Если это условие не выполняется, то алгоритм не реализуется. В первом цикле условие блока 3 алгоритма 10 безусловно выполняется, поэтому далее осуществляется проверка условия дд 0. Так как в начале разгона транспортного средства д 1 д 0, то при этом никакие процедуры не выполняются, программа выходит на окончание цикла и происходит возврат к блоку 2. В процессе разгона транспортного средства д возрастает и в некоторый момент времени достигает порогового значения д 0, при котором выполняется условие дд 0. В результате обеспечивается выполнение процедур, предусмотренных блоками 5-8. В этих блоках накапливается информация, необходимая для построения уравнения регрессии,связывающего расход топлива 1 и частоту вращения вала двигателя д на внешней скоростной характеристике. Запускается счетчик количества необходимых комплектов данных 1 в соответствии с блоком 5 и при невыполнении условия блока 6 производится вычисление вспомогательных параметров х, у в соответствии с блоком 7 и параметров 1 , 1 , 1 ,1 в соответствии с блоком 8. Параметры х и у вычисляются электронным блоком системы управления по формулам Проход по ветви, включающей блоки 7 и 8, осуществляется не менее 10 раз, например 11 раз. Поэтому вспомогательные параметры 1 , 1 , 1 ,1 представляют суммы из всех,например, 11 элементов, полученных при пороговых значениях д 0 на всем диапазоне из менения и фиксации д 0 с установленным интервалом, д 0. После каждого прохода ветви блоков 5-8 осуществляется изменение порогового значения д 0 с заданным шагом, напри мер, д 05 об/мин, и фиксируется новое пороговое значение расхода топлива 0, соответствующее д 0, как предусмотрено блоком 9. Одновременно сохраняются предыдущие значения в переменных д 1 д 0 10. После формирования необходимого количества комплектов 1 данных осуществляется еще один единственный проход по ветви алгоритма, включающей блоки 10-13. В блоке 12 осуществляется вычисление коэффициентов уравнения регрессии, например,11011 д.(4) Коэффициенты регрессии вычисляются по формулам 5 где- количество элементов в массиве использованных вспомогательных параметров,например,1 - 111. При дальнейшем разгоне автомобиля, если двигатель продолжает работать на внешней скоростной характеристике, выполняется условие 0. Поэтому при любом соотношении между д и д 0 соответственно блоку 4 цикл выполнения программы выходит на окончание. При этом лишь периодически обновляется информация о параметрах д 0, 0,д 1 и 1 в операторе 9. При выходе двигателя на предельную регуляторную характеристику расход топливаначинает уменьшаться, поэтому 0. В результате алгоритм переходит на ветвь с базой данных о работе двигателя на предельной регуляторной характеристике. При выполнении условия блока 14 вычисляется параметр , характеризующий наклон характеристикина регуляторной ветви, как предусмотрено блоком 15, и его величина сравнивается с пороговым значением, как предусмотрено блоком 16. Значение вычисляется по формуле где т - плотность топлива. Если, то в блоке 17 осуществляется вычисление переменных х и у, а в блоке 18 накапливаются значения вспомогательных параметров,,,, необходимых 2 2 2 2 для построения уравнения регрессии, связывающего расход топлива 2 и частоту вращения вала двигателя д на предельной регуляторной характеристике двигателя. Эти вспомогательные переменные представляют собой суммы из 10 составляющих элементов, полученных при пороговых значениях частоты вращения вала двигателя д 0. Для этого ветвь программы алгоритма содержит счетчик циклов 2, состоящий из двух блоков 19 и 20. Пороговые значения д 0 и 0 обновляются в блоке 21 и запоминаются их предыдущие значения д 1 и 1. Если 210, это означает, что необходимые значения вспомогательных переменных получены, и можно вычислять коэффициенты искомой регрессии 22021 д.(8) Вычисление коэффициентов регрессии осуществляется в блоке 23 по формулам 20 9706 1 2007.08.30 В блоке 24 на основе совместного решения уравнений регрессий (4) и (8) определяется значение действительной частоты вращения вала двигателяпри максимальной мощно В блоке 25 вычисляется мгновенный расход топливапри Блок 26 предназначен для определения момента двигателя, соответствующего максимальной мощности. Предполагается, что существует возможность вычисле ния моментас помощью электронного блока управления двигателем. После записи двумерного массива значений д и Ме при изменении д в принятых пределах в каждом цикле алгоритма адаптации определяетсяпо значениюпутем ин терполяции между двумя смежными сзначениями частоты вращения вала двигателя. Значениевычисляется по интерполяционной формуле где л, п - ближайшие значения частоты вращения вала двигателя относительноМл, Мп - значения вращающегося момента двигателя, соответствующе л и п . При известных значенияхив блоке 27 вычисляется максимальная мощность В блоке 28 вычисляется удельный расход топлива двигателяпри В блоке 29 вычисляется поправка координаты педали акселератора. Для этого используется уравнение регрессии эталонной характеристики двигателя, устанавливающее зависимость между а и частотой вращения вала двигателя дп в точках пересечения внешней скоростной характеристики Ме(д) с регуляторными характеристиками при соответствующих значениях координаты положения педали акселератора а. Это уравнение имеет вид 2 д пп 01 а 2.(16) Коэффициенты уравнения 0, 1, 2 соответствуют эталонной характеристике двигателя и хранятся в базе данных. Прид ппопределяется значениекоординаты педали акселератора на эталон 2 2 Затем вычисляется искомая поправка После выполнения программы алгоритма адаптации на информационном табло блока индикации появляется информация о значениях параметров двигателя,,,,Полученные значения также записываются в базу данных, затем используются в программе алгоритма формирования сигналов управления на переключение передач и блокирование гидротрансформатора гидромеханической передачи. Сохраненная в памяти информация об этих параметрах двигателя по прошествии определенного времени работы транспортного средства может быть использована после последующих сеансов адаптации для диагностики двигателя на основе изменения этих параметров. Возможности осуществления изобретения с достижением необходимого технического результата подтверждаются использованием известных в теории двигателестроения закономерностей протекания характеристик двигателя внутреннего сгорания, достаточными возможностями существующих сенсорных, программных и микропроцессорных средств для получения необходимых сведений об используемых в предложенном способе параметрах и осуществлении необходимых вычислений в реальном масштабе времени и представлением их на информационное табло. Источники информации 1. Патент США 5551930, МПК 616 61/26, 1996. 2. Патент США 5580332, МПК 616 61/04, 1996. 3. Заявка Германии 19605342, МПК 6 В 60 9/00, 1996. 4. Гируцкий О.Н. и др. Электронные системы управления агрегатами автомобиля. М. Транспорт. - С. 142-149. 5. Весц Нацыянальнай акадэм навук Беларус Серыя фзка-тэхнчных навук. - 2002.3. - С. 39-43. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60W 10/00
Метки: мобильного, управления, способ, тягово-скоростными, режимами, средства, адаптивного, движения
Код ссылки
<a href="https://by.patents.su/8-9706-sposob-adaptivnogo-upravleniya-tyagovo-skorostnymi-rezhimami-dvizheniya-mobilnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Способ адаптивного управления тягово-скоростными режимами движения мобильного средства</a>
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7330
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: режимами, средства, способ, управления, энергетическими, автотранспортного, адаптивного
Текст:
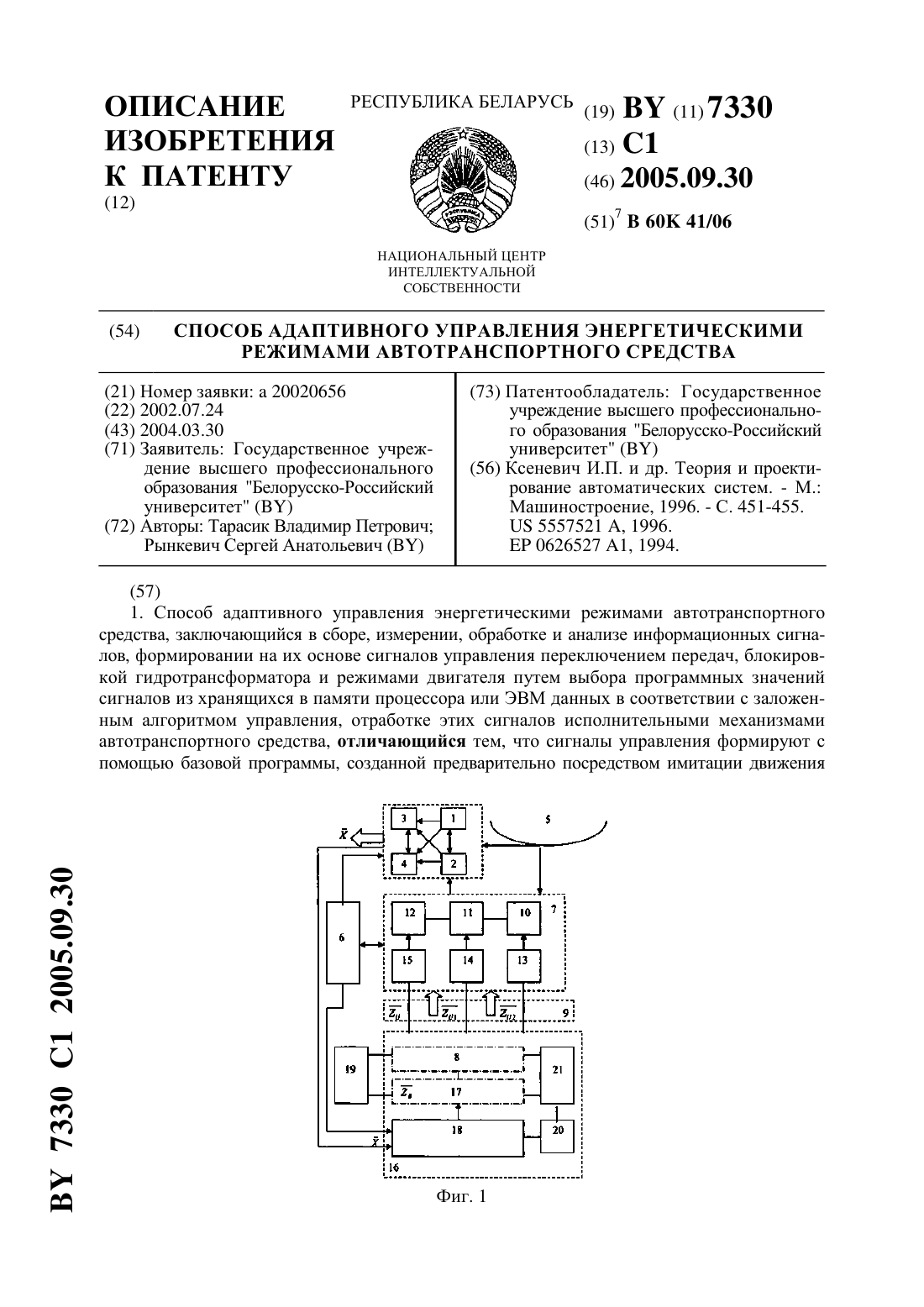
...зависимостей параметров характеристик базовой программы управле 4 7330 1 2005.09.30 ния от параметров автомобиля, внешней среды и управляющих воздействий водителя корреляционный анализ зависимостей параметров характеристик базовой программы от параметров автомобиля, внешней среды и управляющих воздействий водителя и выбор дополнительных информационных переменных, необходимых для адаптации базовой программы регрессионный анализ результатов...
Способ адаптивного управления энергетическими режимами автотранспортного средства
Номер патента: 7276
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: способ, адаптивного, автотранспортного, управления, средства, энергетическими, режимами
Текст:
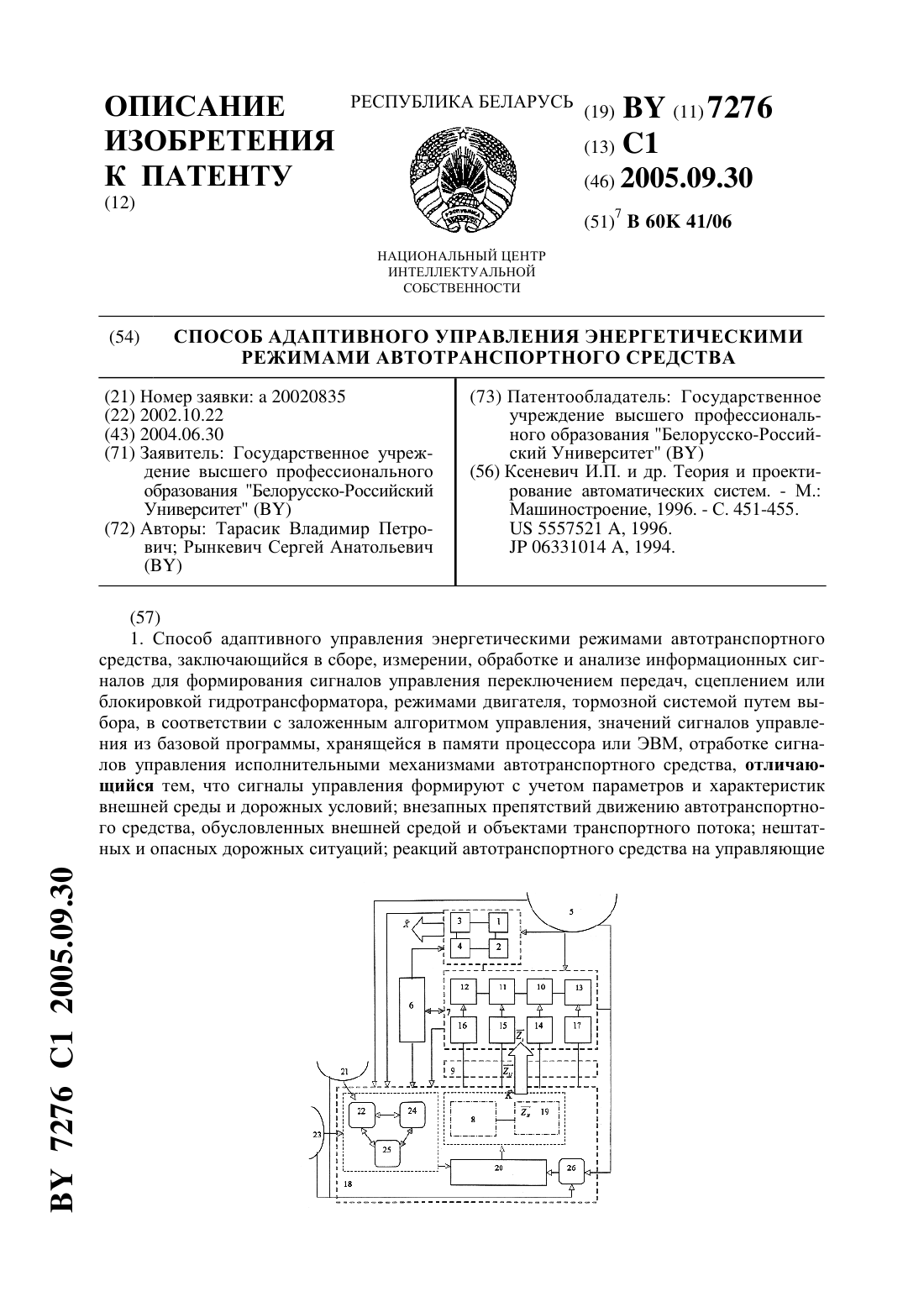
...движению автотранспортного средства, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций реакций автотранспортного средства на управляющие воздействия параметров скоростных режимов движения автотранспортного средства особенностей управления автотранспортным средством, обусловленных стилем, навыками вождения и квалификацией водителя уровня загрузки автотранспортного средства допустимых...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич, Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B65K 41/00
Метки: интеллектуального, система, машины, мобильной, управления, режимами, энергетическими, адаптивного
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...
Способ интеллектуального управления энергетическими режимами автотранспортного средства и система для его реализации

Номер патента: 8007
Опубликовано: 30.04.2006
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/06, F16H 61/02
Метки: интеллектуального, средства, автотранспортного, система, энергетическими, реализации, способ, управления, режимами
Текст:
...интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и интерпретации информационных сигналов, блок базы данных и правил, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей...
Способ интеллектуального управления энергетическими режимами мобильной машины
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: мобильной, энергетическими, режимами, способ, машины, управления, интеллектуального
Текст:
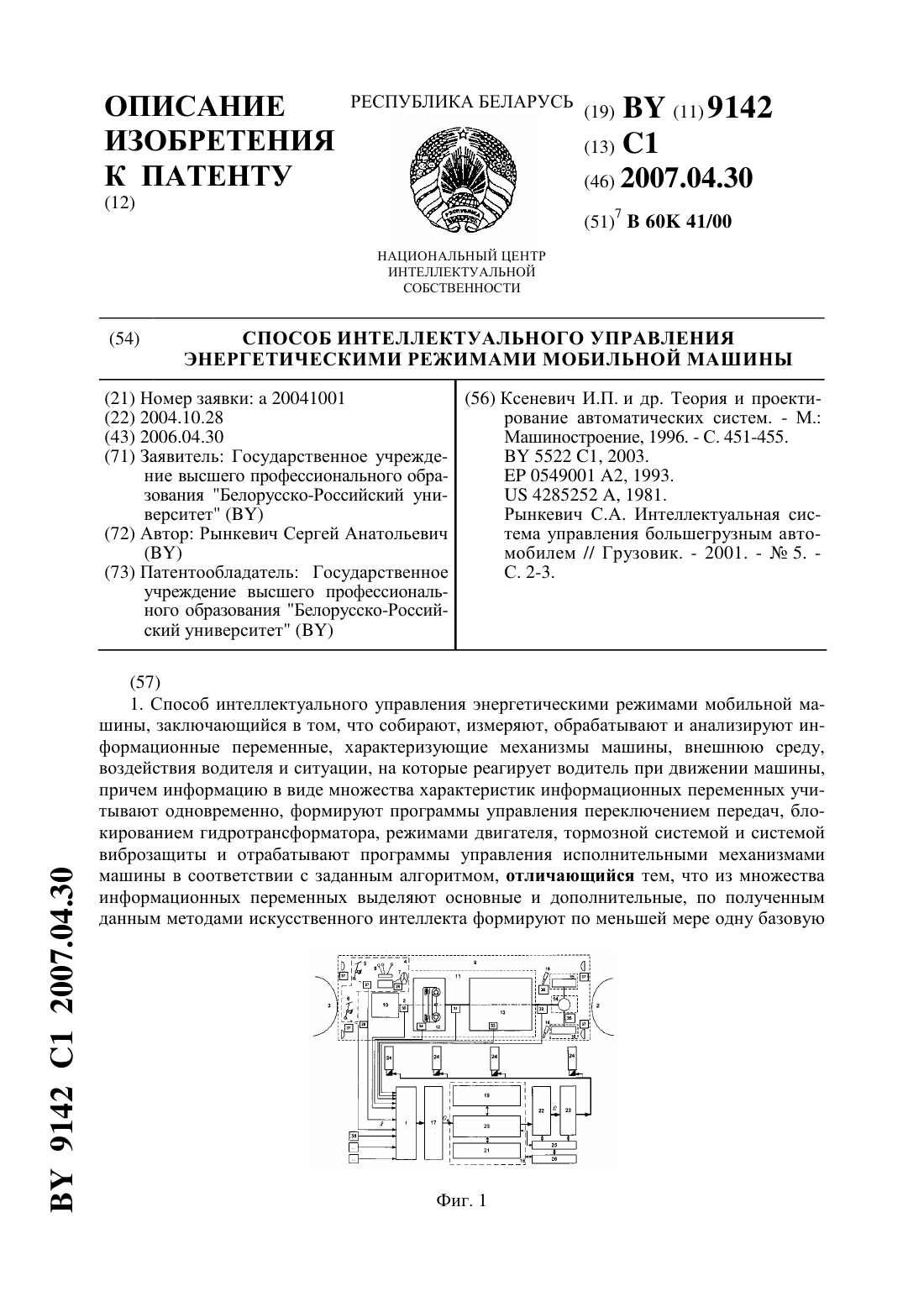
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Предыдущий патент: Шахтный ленточный телескопический конвейер
Следующий патент: Состав для удаления металло-кремнийорганических полимерных остатков при изготовлении кремниевых интегральных микросхем
Случайный патент: Способ оценки NO-продуцирующей активности лейкоцитов