Летательный аппарат короткого взлета и посадки
Текст
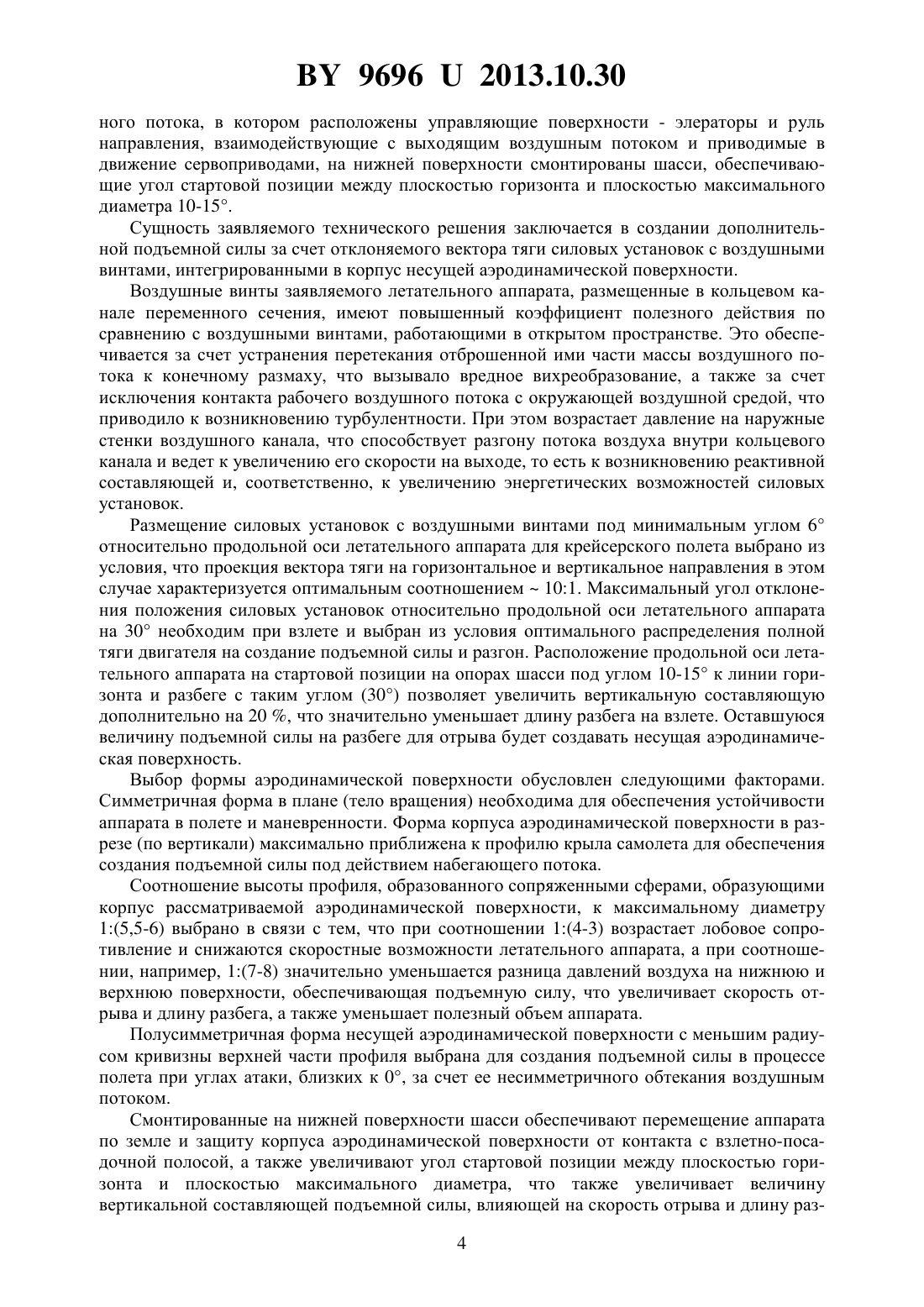
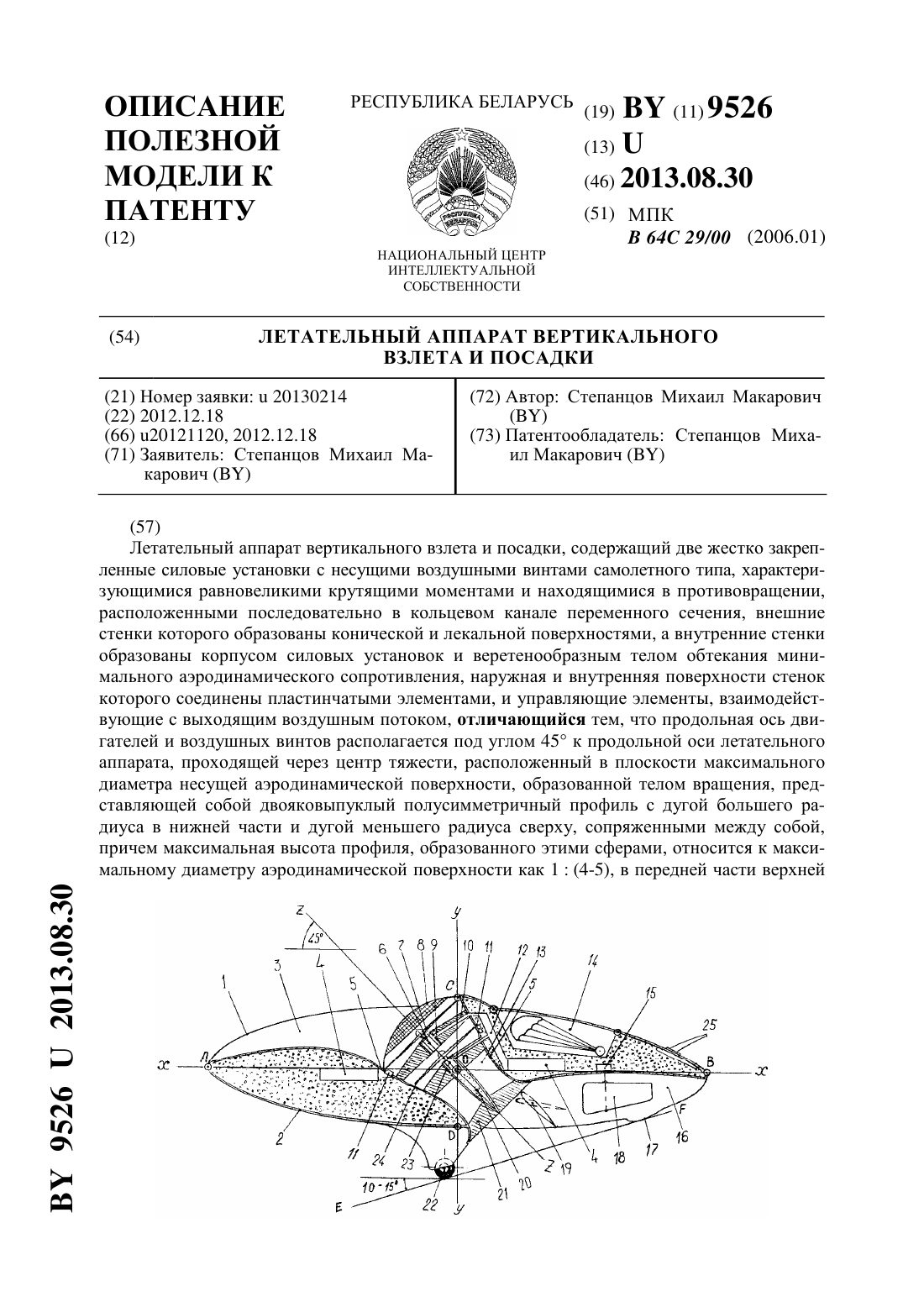
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ(71) Заявитель Степанцов Михаил Макарович(72) Автор Степанцов Михаил Макарович(73) Патентообладатель Степанцов Михаил Макарович(57) Летательный аппарат короткого взлета и посадки, содержащий несущую аэродинамическую поверхность, в корпусе которой размещены две силовые установки, приводящие во вращение воздушные винты правого и левого направления вращения, характеризующиеся равновеликими крутящими моментами, отличающийся тем, что силовые установки вместе с воздушными винтами самолетного типа последовательно расположены в кольцевом канале переменного сечения, заключенном в корпус, вдоль его продольной оси, внешние стенки воздушного канала образованы конической и лекальной поверхностью, а внутренние стенки образованы корпусом силовых установок и веретенообразным телом обтекания минимального аэродинамического сопротивления, наружная и внутренняя поверхности стенок соединены пластинчатыми элементами, расстояния от концов лопастей винтов до стенки канала минимизированы, корпус кольцевого канала с размещенными в нем силовыми установками и воздушными винтами шарнирно закреплен на полуосях, проходящих через центр тяжести летательного аппарата, и способен отклоняться к продольной оси летательного аппарата в вертикальной плоскости с помощью сервопривода и рычажного механизма от минимального угла 6 до максимального 30, центр тяжести расположен в плоскости максимального диаметра несущей аэродинамической поверхности, образованной телом вращения, представляющим собой двояковыпуклый полусимметричный профиль с дугой большего радиуса в нижней части и дугой меньшего радиуса сверху, сопряженных между собой, причем максимальная высота профиля, образованного этими сферами, относится к максимальному диаметру аэродинамической поверхности как 1(5,5-6), в передней верхней части аэродинамической поверхности спрофилирован канал подвода воздуха к силовым установкам, а в задней нижней чвсти несущей аэродинамической поверхности выполнен канал выхода воздушного потока, в котором расположены управляющие поверхности - элераторы и руль направления, взаимодействующие с выходящим воздушным потоком и приводимые в движение сервоприводами, на нижней поверхности,смонтированы шасси обеспечивающие угол стартовой позиции между плоскостью горизонта и плоскостью максимального диаметра 10-15.(56) 1. Житомирский Г.И. Конструкция самолетов Учебник для авиационных специальностей вузов. - М. Машиностроение, 1991. - С. 128-131. 2. Кудишин И. Раритеты американской авиации. - М. АСТ Апрель, 2001. - С. 11-22. (прототип). 3. Бауэрс П. Летательные аппараты нетрадиционных схем Пер. с англ. - М. Мир,1991. - С. 120-122. 4. Чумак П. И., Крывокрысенко В.Ф. Расчет, проектирование и постройка сверхлегких самолетов. - М. Патриот, 1991. - 238 с. Заявляемая полезная модель относится к области авиации и может быть использована при создании пилотируемых и беспилотных летательных аппаратов. Аналогами заявляемого летательного аппарата являются самолеты короткого взлета и посадки, использующие средства механизации крыла для увеличения несущей способности летательного аппарата за счет управления подъемной силой и сопротивлением. К средствам механизации крыла, увеличивающим его несущие возможности на взлетнопосадочных режимах, относятся предкрылки, закрылки, зависающие элероны (флайпероны), щитки. Для увеличения подъемной силы крыла также используется эффект щелей при выпуске предкрылков в носовой части крыла и при выпуске щелевых и многощелевых закрылков, которые обеспечивают использование аэродинамического подпора под нижней поверхностью крыла. Это позволяет улучшить взлетно-посадочные характеристики, уменьшить скорости отрыва на взлете и скорости приземления на посадке. В результате сокращается длина разбега и пробега, а также обеспечивается увеличение градиента набора высоты после взлета и увеличение крутизны глиссады планирования при заходе на посадку, что необходимо при выполнении полетов с ограниченных площадок, имеющих препятствия по курсу взлета и захода на посадку. При установке средств механизации в рабочее положение увеличивается эффективная кривизна профиля крыла. За счет этого возрастает скорость потока и разрежение над крылом, вследствие чего возрастает подъемная сила сечений крыла, занятых механизацией, а при применении выдвижных средств механизации - предкрылков и закрылков - увеличивается эффективная площадь крыла,создающая подъемную силу 1. Кроме того, для увеличения подъемной силы крыла применяются энергетические средства за счет использования энергии воздуха, отбираемого от силовой установки и направляемой на верхние поверхности крыла, - система управления пограничным слоем,система управления циркуляцией и другие системы, которые предотвращают срыв потока и обеспечивают ламинарное обтекание крыла на больших углах отклонения закрылков. Высокоэффективным способом повышения несущих свойств аэродинамических поверхностей, создающих подъемную силу летательного аппарата, является их обдувка большеразмерными воздушными винтами с диаметром, соизмеримым с размахом крыла. В некоторых из летательных аппаратов короткого взлета и посадки устройство создания тяги отклоняется на небольшой угол для обеспечения горизонтального полета, и в этом случае они также создают значительную часть подъемной силы. Применение механизации крыла усложняет конструкцию летательного аппарата, увеличивает массу крыла, требует конструктивных решений для синхронности действия механизации при отклонении их в рабочее положение на каждом полукрыле. Кроме того,при отклонении средств механизации происходит перемещение центра давления (точки приложения полной аэродинамической подъемной силы) летательного аппарата, что усложняет его пилотирование и требует применения средств балансировки для сохранения устойчивости и управляемости летательным аппаратом. Наиболее близким к заявляемой полезной модели, ее прототипом является дископлан фирмы Чанс Воут 5-1 (-173) американского конструктора Циммермана 2. По 2 96962013.10.30 строенный в 1941 году самолет с индексом -173 имел симметричный профиль крыла,обводы корпуса в плане которого имели не круглую форму, а овальную (форму каблука). Самолет оснащался двумя силовыми установками мощностью по 80 л.с., интегрированными в крыло, которые имели одна правое, вторая левое вращение и соединялись синхронизирующим валом на случай отказа одного из двигателей. Двигатели через понижающие редукторы приводили во вращение трехлопастные воздушные винты большого диаметра также противонаправленного вращения, которые обдували более 90 площади крыла. Винты вращались в сторону, противоположную направлению закручивания спутных вихрей, сходящих с крыла, благодаря чему практически сводилось до минимума индуктивное сопротивление системы крыло-винты. Винты располагались почти на крайних точках размаха крыла. Для управления по тангажу и крену на прототипе имелся дифференциально отклоняемый, выходящий за пределы крыла цельноповоротный стабилизатор-элератор, а управление по курсу осуществлялось с помощью рулей поворота. Управляющие поверхности обдувались спутной струей от воздушных винтов. Самолет оснащался трехопорным шасси с высокостоечными основными опорами для обеспечения безопасного расстояния от земли до вращающихся воздушных винтов при рулении, разбеге и пробеге. Скорость отрыва летательного аппарата составляет 40-50 км/ч, а посадка могла выполняться со скоростью 56,4 км/ч при очень большом угле атаки - 36 3. Основными недостатками прототипа являются сложная конструкция летательного аппарата, наличие в ней выступающих за пределы корпуса крыла вращающихся большеразмерных воздушных винтов, а также подвижных управляющих поверхностей,пристыкованных к крылу. Чтобы избежать несимметричного обдува крыла в случае отказа одного из двигателей, приводящих во вращение воздушные винты, применялись сложные механические системы передач и синхронизации, состоящие из редукторов и валов. Поэтому все вышеперечисленные недоработки -173 отрицательно сказывались на уровне безопасности и его ресурсных возможностях при эксплуатации летательного аппарата. Задачей заявляемой полезной модели является улучшение технических характеристик летательного аппарата за счет снижения скоростей отрыва и приземления, а также повышение безопасности при его эксплуатации. Поставленная задача решается тем, что в летательном аппарате короткого взлета и посадки, содержащем несущую аэродинамическую поверхность, в корпусе которой размещены две силовые установки, приводящие во вращение воздушные винты правого и левого направления вращения, характеризующиеся равновеликими крутящими моментами, силовые установки вместе с воздушными винтами самолетного типа последовательно расположены в кольцевом канале переменного сечения, заключенном в корпус, вдоль его продольной оси, внешние стенки воздушного канала образованы конической и лекальной поверхностью, а внутренние стенки образованы корпусом силовых установок и веретенообразным телом обтекания минимального аэродинамического сопротивления, наружная и внутренняя поверхности стенок соединены пластинчатыми элементами, расстояния от концов лопастей винтов до стенки канала минимизированы, корпус кольцевого канала с размещенными в нем силовыми установками и воздушными винтами шарнирно закреплен на полуосях, проходящих через центр тяжести летательного аппарата, и способен отклоняться к продольной оси летательного аппарата в вертикальной плоскости с помощью сервопривода и рычажного механизма от минимального угла 6 до максимального 30,центр тяжести расположен в плоскости максимального диаметра несущей аэродинамической поверхности, образованной телом вращения, представляющим собой двояковыпуклый полусимметричный профиль с дугой большего радиуса в нижней части и дугой меньшего радиуса сверху, сопряженных между собой, причем максимальная высота профиля, образованного этими сферами, относится к максимальному диаметру аэродинамической поверхности как 1(5,5-6), в передней верхней части аэродинамической поверхности спрофилирован канал подвода воздуха к силовым установкам, а в задней нижней части несущей аэродинамической поверхности выполнен канал выхода воздуш 3 96962013.10.30 ного потока, в котором расположены управляющие поверхности - элераторы и руль направления, взаимодействующие с выходящим воздушным потоком и приводимые в движение сервоприводами, на нижней поверхности смонтированы шасси, обеспечивающие угол стартовой позиции между плоскостью горизонта и плоскостью максимального диаметра 10-15. Сущность заявляемого технического решения заключается в создании дополнительной подъемной силы за счет отклоняемого вектора тяги силовых установок с воздушными винтами, интегрированными в корпус несущей аэродинамической поверхности. Воздушные винты заявляемого летательного аппарата, размещенные в кольцевом канале переменного сечения, имеют повышенный коэффициент полезного действия по сравнению с воздушными винтами, работающими в открытом пространстве. Это обеспечивается за счет устранения перетекания отброшенной ими части массы воздушного потока к конечному размаху, что вызывало вредное вихреобразование, а также за счет исключения контакта рабочего воздушного потока с окружающей воздушной средой, что приводило к возникновению турбулентности. При этом возрастает давление на наружные стенки воздушного канала, что способствует разгону потока воздуха внутри кольцевого канала и ведет к увеличению его скорости на выходе, то есть к возникновению реактивной составляющей и, соответственно, к увеличению энергетических возможностей силовых установок. Размещение силовых установок с воздушными винтами под минимальным углом 6 относительно продольной оси летательного аппарата для крейсерского полета выбрано из условия, что проекция вектора тяги на горизонтальное и вертикальное направления в этом случае характеризуется оптимальным соотношением 101. Максимальный угол отклонения положения силовых установок относительно продольной оси летательного аппарата на 30 необходим при взлете и выбран из условия оптимального распределения полной тяги двигателя на создание подъемной силы и разгон. Расположение продольной оси летательного аппарата на стартовой позиции на опорах шасси под углом 10-15 к линии горизонта и разбеге с таким углом (30) позволяет увеличить вертикальную составляющую дополнительно на 20 , что значительно уменьшает длину разбега на взлете. Оставшуюся величину подъемной силы на разбеге для отрыва будет создавать несущая аэродинамическая поверхность. Выбор формы аэродинамической поверхности обусловлен следующими факторами. Симметричная форма в плане (тело вращения) необходима для обеспечения устойчивости аппарата в полете и маневренности. Форма корпуса аэродинамической поверхности в разрезе (по вертикали) максимально приближена к профилю крыла самолета для обеспечения создания подъемной силы под действием набегающего потока. Соотношение высоты профиля, образованного сопряженными сферами, образующими корпус рассматриваемой аэродинамической поверхности, к максимальному диаметру 1(5,5-6) выбрано в связи с тем, что при соотношении 1(4-3) возрастает лобовое сопротивление и снижаются скоростные возможности летательного аппарата, а при соотношении, например, 1(7-8) значительно уменьшается разница давлений воздуха на нижнюю и верхнюю поверхности, обеспечивающая подъемную силу, что увеличивает скорость отрыва и длину разбега, а также уменьшает полезный объем аппарата. Полусимметричная форма несущей аэродинамической поверхности с меньшим радиусом кривизны верхней части профиля выбрана для создания подъемной силы в процессе полета при углах атаки, близких к 0, за счет ее несимметричного обтекания воздушным потоком. Смонтированные на нижней поверхности шасси обеспечивают перемещение аппарата по земле и защиту корпуса аэродинамической поверхности от контакта с взлетно-посадочной полосой, а также увеличивают угол стартовой позиции между плоскостью горизонта и плоскостью максимального диаметра, что также увеличивает величину вертикальной составляющей подъемной силы, влияющей на скорость отрыва и длину раз 4 96962013.10.30 бега. Выбор угла стартовой позиции обоснован тем, что при угле менее 10, например 5,необходимая скорость отрыва и длина разбега значительно возрастают, т.к. вертикальная составляющая вектора тяги при этом заметно падает. Угол стартовой позиции более 15,например 20, затрудняет взлет с короткой взлетно-посадочной полосы ввиду большого лобового сопротивления. В пространстве между обтекателями шасси движется скоростной поток от винтов, с которыми взаимодействуют органы управления - элератор, управляющий по тангажу и крену, и руль направления. Безопасность заявленного летательного аппарата при эксплуатации обеспечивается конструктивными особенностями, связанными с отсутствием выступающих за пределы несущей аэродинамической поверхности быстровращающихся и подвижных элементов, а также возможностью в аварийной ситуации, например при потере управляемости аппаратом, применить спасательное средство - посадочный парашют. Устойчивость летательного аппарата относительно его продольной оси обеспечивается формой несущей аэродинамической поверхности, когда в полете возникающий крен вызывает прирост аэродинамической подъемной силы на опущенной поверхности и уменьшение подъемной силы на поднятой поверхности. Это создает восстанавливающий момент действия сил относительно центра тяжести, расположенного на продольной оси и возвращает летательный аппарат к исходному прямолинейному полету. Равенство крутящих моментов силовых установок и моментов воздушных винтов, находящихся в противовращении, сводит к минимуму балансировочные потери при отклонении органов управления. Обтекатели колес опор шасси, расположенные параллельно по длине вдоль канала выхода в виде подфюзеляжных гребней, повышают устойчивость летательного аппарата в путевом отношении. Заявленное техническое решение поясняется расчетами. В качестве исходных данных принимаются характеристики прототипа, приведенные в его описании, и достигнутые характеристики заявляемого летательного аппарата (см. ниже). Диаметр аэродинамической поверхности для расчета принят равным 1,8 м, вес целевой нагрузки - 10 и 12 кг. Аэродинамическая подъемная сила при разбеге летательного аппарата может быть вычислена по формуле 2,2 где- аэродинамическая подъемная сила аппарата, кг- аэродинамический коэффициент подъемной силы, зависящей от угла атаки и формы поверхности- плотность воздуха для расчетов с учетом высоты полета, принимаемая равной 0,125 кг/м 3- скорость разбега, м/с- площадь несущей аэродинамической поверхности, м 2. На летательном аппарате применены две силовые установки, развивающие максимальную тягу воздушных винтов на взлете, равную 8 кгс. При стартовой позиции аппарата с отклоненным вектором тяги на 30 относительно большого диаметра и плюс 15 - стояночный угол, получим вертикальную составляющую силы тяги- на разбеге под углом 45, которая участвует в создании подъемной силы 4580,75,6 кгс.(2) При взлетном весе 10 кг оставшуюся часть подъемной силы, необходимой для отрыва аппарата на разбеге (10-5,64,4 кг), должна создавать несущая аэродинамическая поверхность. Это произойдет на скорости отрыва где отр - скорость отрыва, км/ч 1 - вес аппарата, который должен быть уравновешен подъемной силой несущей аэродинамической поверхности, - 4,4 кг- безразмерный аэродинамический коэффициент подъемной силы, на взлетных углах равен 0,8- плотность воздуха 0,125 кг/м 3- площадь аэродинамической поверхности, м 2,(4)23,140,9 22,54,где- радиус несущей аэродинамической поверхности 24,4 отр 5,8 м / с 21 км / ч.(5) 0,80,1252,54 При взлетном весе летательного аппарата, равном 12 кг, величина части взлетного веса, который должен быть уравновешен подъемной силой несущей аэродинамической поверхности на разбеге 112-5,66,4 кг, а скорость отрыва при этом составит 26,4 отр 7,1 м / с 26 км / ч.(6) 0,80,1252,54 Поэтому скорость отрыва заявляемого летательного аппарата, которая влияет на длину разбега за счет применения отклоняемого вектора тяги силовых установок с воздушными винтами, снижается практически в 2 раза по сравнению с прототипом, и соответственно уменьшаются скорость приземления и длина пробега. Заявляемое техническое решение поясняется фигурой, где приведена схема летательного аппарата короткого взлета и посадки с отклоняемым вектором тяги в вертикальном разрезе по линии большого диаметра несущей аэродинамической поверхности. Пунктирной линией обозначено положение кольцевого канала, содержащего силовые установки с воздушными винтами, когда его продольная ось отклонена от плоскости большого диаметра несущей аэродинамической поверхности на 30. Как видно из чертежа заявленного летательного аппарата, корпус несущей аэродинамической поверхности состоит из верхней части 1, образованной дугой меньшего радиуса,и нижней части 2, образованной дугой большего радиуса. В корпусе несущей аэродинамической поверхности находится воздушный канал 16 переменного сечения, образованный внешней стенкой 15, корпусом первой силовой установки 9 и веретенообразным телом обтекания 23 минимального аэродинамического сопротивления, в корпусе 9 находится первая силовая установка 6, на которой установлен первый воздушный винт 7. Корпус 9 крепится к стенкам кольцевого канала с помощью соединительных пластинчатых элементов 10, в которых имеются каналы подвода коммуникации 11. Вторая силовая установка 24 снабжена воздушным винтом 25 и установлена в корпусе веретенообразного тела 23, закрепленного с помощью пластинчатых элементов 10. Внутри объема, образованного верхним 1 и нижним 2 обводами корпуса аэродинамической поверхности, содержатся отсеки для размещения электрохимических элементов питания 4, грузовые отсеки 5,парашютный отсек 17. В канале подвода воздуха к силовым установкам 3 установлена защитная сетка 8 для предотвращения попадания инородных предметов. Регулятор оборотов 12 расположен на стенке канала 15 для обеспечения его эффективного охлаждения. В канале выхода воздушного потока 21 расположены элераторы 22 и руль управления 19,управляемые сервоприводами 14. Для отклонения корпуса кольцевого канала 15, содержащего силовые установки 6 и 24 и воздушные винты 7 и 25, установлен сервопривод 14 с рычажными механизмами 13. В стояночном положении заявляемый аппарат опирается на колесные шасси - переднее 26 и заднее 20, которые закрыты обтекателями - подфюзеляж 6 96962013.10.30 ными гребнями 27. Связь летательного аппарата с наземными службами осуществляется с помощью приемопередатчика, снабженного антенной 18. Продольная осьлетательного аппарата проходит через центр тяжести 0 и расположена в плоскости максимального диаметранесущей аэродинамической поверхности. Продольная ось двигателейпроходит через центр тяжести 0 и расположена под минимальным углом 6-12 к оси . Максимальная высота профиля(показанная на фигуре расстоянием между выносными линиями), образованная верхней 1 и нижней 2 частями аэродинамической поверхности, относится к максимальному диаметру как 1(5,5-6). Максимальный угол отклонения на 30 продольной оси кольцевого канала, содержащего силовые установки с воздушными винтами, относительно плоскости большого диаметрас осью вращения в центре тяжести 0 занимает положение по оси . Стояночный угол между продольной осью аппаратаи плоскостью опорной осьюсоставляет 10-15. Заявляемый летательный аппарат короткого взлета и посадки с изменяемым вектором тяги выполняет полет следующим образом. Аппарат на стартовой позиции устанавливается на колеса шасси 26 и 20 на горизонтальную поверхностьили уклон. Продольная ось силовых установокотклоняется на угол 30 относительно большого диаметра с помощью сервопривода 14 и рычажного механизма 13 в положение . Вертикальная составляющая силы тягипри таком положении летательного аппарата будет составлять 450,7- максимальной тяги двигателей. При вращении воздушного винта 7 первого двигателя 6 вследствие взаимодействия его лопастей с воздухом в канале 3 образуется область пониженного давления, вызывающая ускорение входящего воздушного потока в плоскости вращения винта. Второй винт 25 второго двигателя 24 принимает ускоренный в кольцевом канале 16 воздушный поток от первого винта 7. Поскольку второй воздушный винт имеет углы установки лопастей примерно в 2 раза больше, чем у первого, и обеспечивает практически одинаковое аэродинамическое воздействие на поток, как и первый воздушный винт, но при противоположном вращении относительно первого, то в результате такого взаимодействия воздушный поток при равных крутящих моментах воздушных винтов спрямляется. На расстоянии полудиаметра второго винта воздушный поток получает максимальное ускорение и сжимается. На этом расстоянии от винта выполнено максимальное сужение кольцевого канала для максимального использования энергии воздушного потока. Далее кольцевой канал расширяется, что ведет к уменьшению скорости потока и, соответственно, к возрастанию давления на стенки кольцевого канала. После выхода двигателей на максимальный режим летательный аппарат начинает разбег. Когда составляющая тяги двигателей и подъемная сила, создаваемая несущей аэродинамической поверхностью, превысят взлетный вес аппарата, происходит отрыв от поверхности взлета и переход аппарата в набор высоты по наклонной траектории. Аэродинамические органы управления - элераторы 22 и руль направления 19 - взаимодействуют с выходящим воздушным потоком в канале 21, обеспечивают управление полетом по тангажу, крену и курсу. После достижения заданной высоты полета корпус кольцевого канала, содержащий силовые установки с воздушными винтами, с помощью сервопривода 14 и рычажного механизма 13 отклоняется относительно большого диаметра в положение его продольной оси 6 для обеспечения режима крейсерского полета с заданной поступательной скоростью. При заходе летательного аппарата на посадку производится гашение поступательной скорости, продольная ось кольцевого канала с силовыми установками отклоняется на 30 вверх относительно большого диаметра, и по наклонной траектории летательный аппарат подводится к точке приземления с вертикальной скоростью 1-2 м/с. Для обеспечения полета беспилотного летательного аппарата в автоматическом режиме по заданной программе служат приемопередающее устройство с антенной 18 и соответствующее радиооборудование. 7 96962013.10.30 Заявляемое техническое решение было реализовано при изготовлении беспилотного летательного аппарата короткого взлета и посадки с несущей поверхностью и отклоняемым вектором тяги двигателей. Корпус аппарата - двояковыпуклый полусимметричный профиль диметром 1,8 м - был изготовлен из пенопласта ПС-60, покрытого сверху и снизу слоем стеклоткани толщиной 0,2 мм с пропиткой эпоксидным клеем ЭД-20. Под углом 6-30 к продольной оси аэродинамической поверхности в кольцевом канале размещена комплексная силовая установка,содержащая два электродвигателя 4020/07 мощностью 1400/1,9 вт./л.с., с максимальной частотой вращения 13500-1. Воздушные винты фиксированного шага диаметром 0,360 и 0,340 м выполнены из углепластика. Тяга каждого винта при максимальных оборотах 13500-1 составляет 4 кгс, обоих воздушных винтов - 8 кгс. Охлаждение двигателей воздушное. Корпус кольцевого канала установлен на полуосях, которые расположены на оси вращения, проходящей через центр тяжести, и с помощью сервопривода через рычаг, тягу и кронштейн, расположенный на боковой поверхности корпуса кольцевого канала, может отклоняться на угол от 6 до 30 относительно плоскости наибольшего диаметра. Регулятор оборотовзадает режим работы двигателей по команде с пульта управления , имеющего 14 каналов радиосвязи, через антенну приемопередатчика летательного аппарата. В качестве электрохимического элемента питания применены две аккумуляторные батареи -50500 напряжением 14,5 В и емкостью 5 Ач. Для приведения в действие органов управления, взаимодействующих с выходящим воздушным потоком, используются сервоприводы. Вес изготовленного летательного аппарата составил 6,9 кг. После изготовления аппарата проводили испытания взлетно-посадочных характеристик с взлетным весом 10 и 12 кг без отклонения вектора тяги и с отклонением вектора тяги относительно продольной оси аппарата на 30. Разбег летательного аппарата осуществлялся при стояночном угле 15 относительно линии горизонта. Угол стартовой позиции продольной оси силовых установок относительно горизонта рассчитывался как сумма углов его положения относительно плоскости наибольшего диаметра плюс стояночный угол аппарата. Скорости разбега замерялись по навигационному приемнику . Достигнутые характеристики заявляемого аппарата в сравнении с прототипом приведены в таблице. Из таблицы видно, что скорости отрыва у заявляемого летательного аппарата в большей степени зависят от угла отклонения вектора тяги, а также от взлетного веса, и при отклоненном векторе тяги на 30 относительно продольной оси скорости отрыва почти в 2 раза меньше, чем у прототипа, соответственно снижаются и скорости приземления при выполнении посадки с отклоненным вектором тяги. Из анализа приведенных данных видно, что заявляемый летательный аппарат короткого взлета и посадки с несущей аэродинамической поверхностью и отклоненным вектором тяги обеспечивает достижение положительного эффекта, который заключается в следующем уменьшение скоростей отрыва и приземления повышение безопасности при эксплуатации и обслуживании, связанное с отсутствием выходящих за пределы корпуса вращающихся и подвижных элементов конструкции возможность в аварийных ситуациях применить средство спасения - посадочный парашют. 96962013.10.30 Взлетно-посадочные характеристики летательных аппаратов Конструктивные особенности аппарата Угол старположение отношение угол стар- Взлет- товой по- Скорость высоты товой по- ный вес, зиции дви- отрыва, Примечаниеп/п продольной оси профиля к зиции кг гателей,км/ч силовых максималь- летательград установок, ному диа- ного аппаград метру рата, град 1 4 15,5 15 10 19 54,6 без откло 2 6 15,5 15 10 21 48,4 нения вектора тяги с частично отклонен 3 15 15,5 15 10 30 38,9 ным вектором тяги с полностью отклонен 4 30 15,5 15 10 45 21,0 ным вектором тяги потеря управляемо 5 40 15,5 15 10 55 сти при взлете малая подъемная сила 6 6 15,0 15 10 21 58,1 аэродинамической поверхности 7 6 15,7 15 10 21 48,0 8 6 16,0 15 10 21 45,9 снижение максималь 9 6 17,0 15 10 21 44,3 но достижимой скорости 10 6 15,5 5 10 11 67,9 11 6 15,5 10 10 16 49,7 12 6 15,5 12 10 18 48,9 13 6 15,5 15 10 21 48,4 высокое ло 14 6 15,5 20 10 26 46,0 бовое сопротивление без откло 15 6 15,5 15 12 21 54,8 нения вектора тяги 96962013.10.30 Продолжение таблицы Конструктивные особенности аппарата Угол старположение отношение угол стар- Взлет- товой по- Скорость высоты товой по- ный вес, зиции дви- отрыва, Примечаниеп/п продольной оси профиля к зиции кг гателей,км/ч силовых максималь- летательград установок, ному диа- ного аппаград метру рата, град с полностью отклонен 16 30 15,5 15 12 45 26,0 ным вектором тяги 17 прототип, взлет 36 40-50 18 прототип, посадка 36 56,4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 10
МПК / Метки
МПК: B64C 29/00
Метки: посадки, короткого, аппарат, взлета, летательный
Код ссылки
<a href="https://by.patents.su/10-u9696-letatelnyjj-apparat-korotkogo-vzleta-i-posadki.html" rel="bookmark" title="База патентов Беларуси">Летательный аппарат короткого взлета и посадки</a>
Летательный аппарат вертикального взлета и посадки
Номер патента: U 9526
Опубликовано: 30.08.2013
Автор: Степанцов Михаил Макарович
МПК: B64C 29/00
Метки: летательный, взлета, вертикального, посадки, аппарат
Текст:
...в канале выхода воздушного потока. При заходе на посадку углы тангажа аппарата увеличиваются для гашения скорости и создания посадочной конфигурации для приземления. Выбор формы аэродинамической поверхности обусловлен следующими факторами. Симметричная форма поверхности в плане (тело вращения) необходима для обеспечения устойчивости аппарата при полете и маневрировании. Форма аэродинамической поверхности в разрезе (по вертикали)...
Летательный аппарат вертикального взлета и посадки
Номер патента: U 8966
Опубликовано: 28.02.2013
Автор: Степанцов Михаил Макарович
МПК: B64C 29/00
Метки: посадки, аппарат, вертикального, взлета, летательный
Текст:
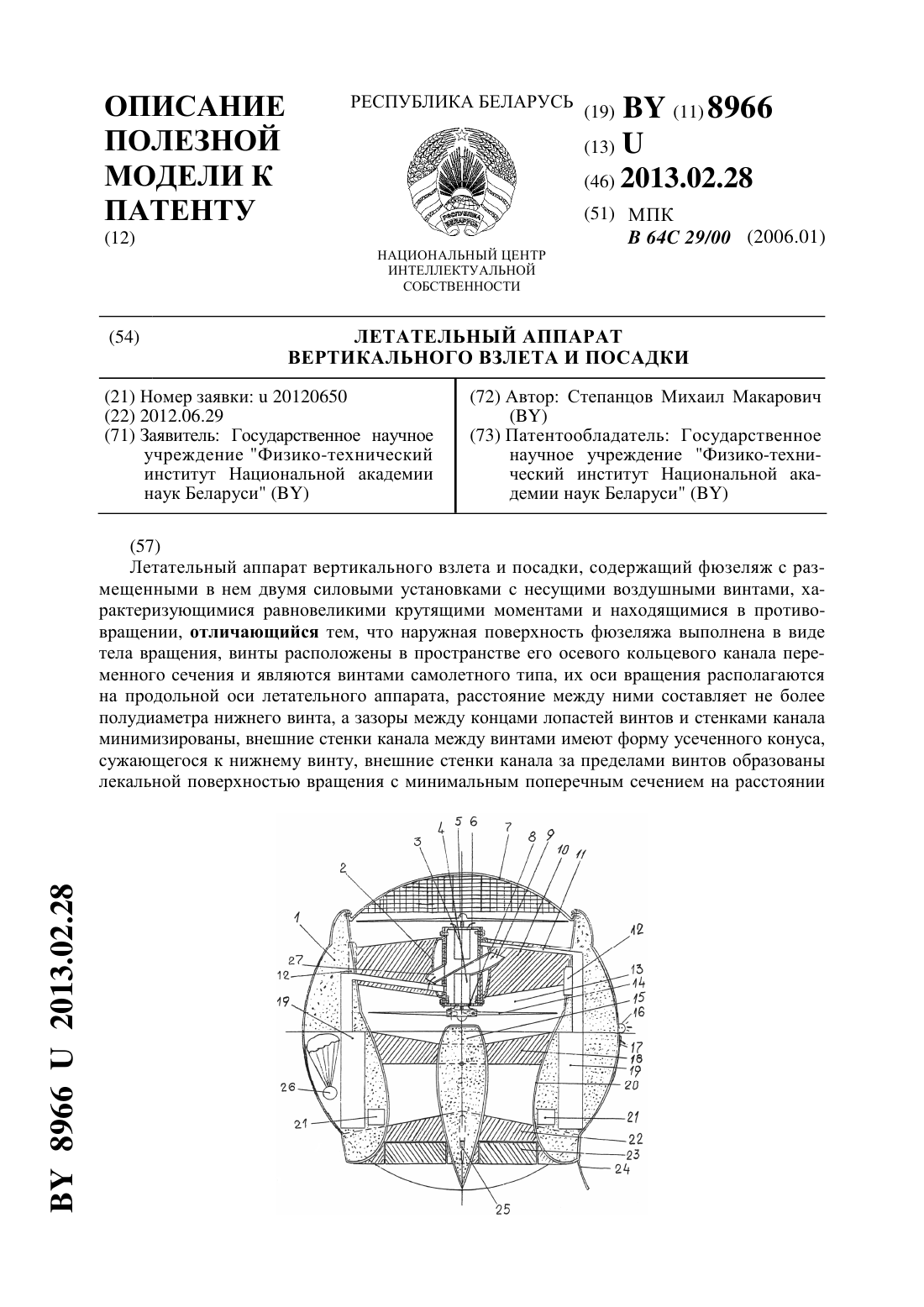
...аппарате не контактирует с наружным воздухом и движется только по кольцевому каналу. При этом, чем меньше поперечное сечение канала, тем выше скорость потока, и наоборот. Геометрический профиль воздушного канала повторяет профиль движущейся воздушной массы, что обеспечивает максимальное снижение энергетических потерь на рабочих режимах двигателей. У предлагаемого летательного аппарата практически отсутствуют аэродинамические потери,...
Беспилотный летательный аппарат
Номер патента: U 3919
Опубликовано: 30.10.2007
Авторы: Луканин Геннадий Петрович, Чаховский Юрий Николаевич
МПК: B64C 39/00, B64C 3/00
Метки: аппарат, беспилотный, летательный
Текст:
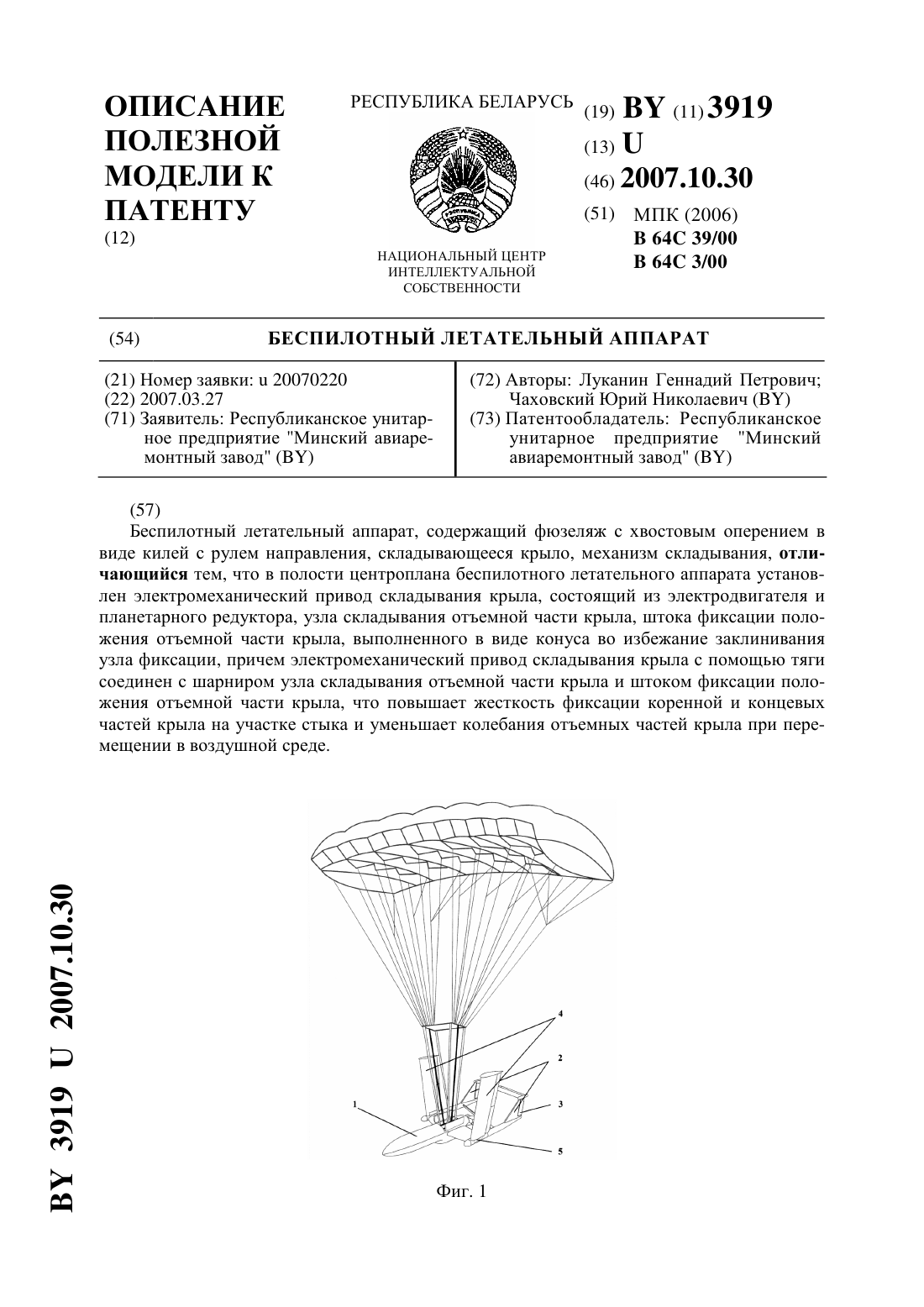
...согласно полезной модели в полости центроплана беспилотного летательного аппарата установлен электромеханический привод складывания крыла, состоящий из электродвигателя и планетарного редуктора, узла складывания отъемной части крыла, штока фиксации положения отъемной части крыла, выполненного в виде конуса во избежание заклинивания узла фиксации, причем электромеханический привод складывания крыла с помощью тяги соединен с шарниром...
Летательный аппарат

Номер патента: U 7820
Опубликовано: 30.12.2011
Авторы: Анохин Александр Михайлович, Гущин Анатолий Леонидович, Гречихин Леонид Иванович, Мишута Виктор Николаевич, Мишута Дмитрий Викторович, Нарушевич Аркадий Александрович
МПК: B64C 3/40
Метки: летательный, аппарат
Текст:
...характеристик, а также увеличение аэродинамического качества и прочностных характеристик замкнутого крыла. 2 78202011.12.30 Поставленная задача решается следующим образом. Предложен летательный аппарат,состоящий из фюзеляжа с хвостовым оперением и крылом, выполненным в виде замкнутого контура, причем крыло выполнено в виде эллипса в вертикальной плоскости, с горизонтальной большой осью и с соотношением осей 2,5-3,5, причем при...
Беспилотный летательный аппарат
Номер патента: U 6254
Опубликовано: 30.06.2010
Авторы: Чаховский Юрий Николаевич, Луканин Геннадий Петрович, Мацкевич Артур Николаевич
МПК: B64C 39/00
Метки: беспилотный, летательный, аппарат
Текст:
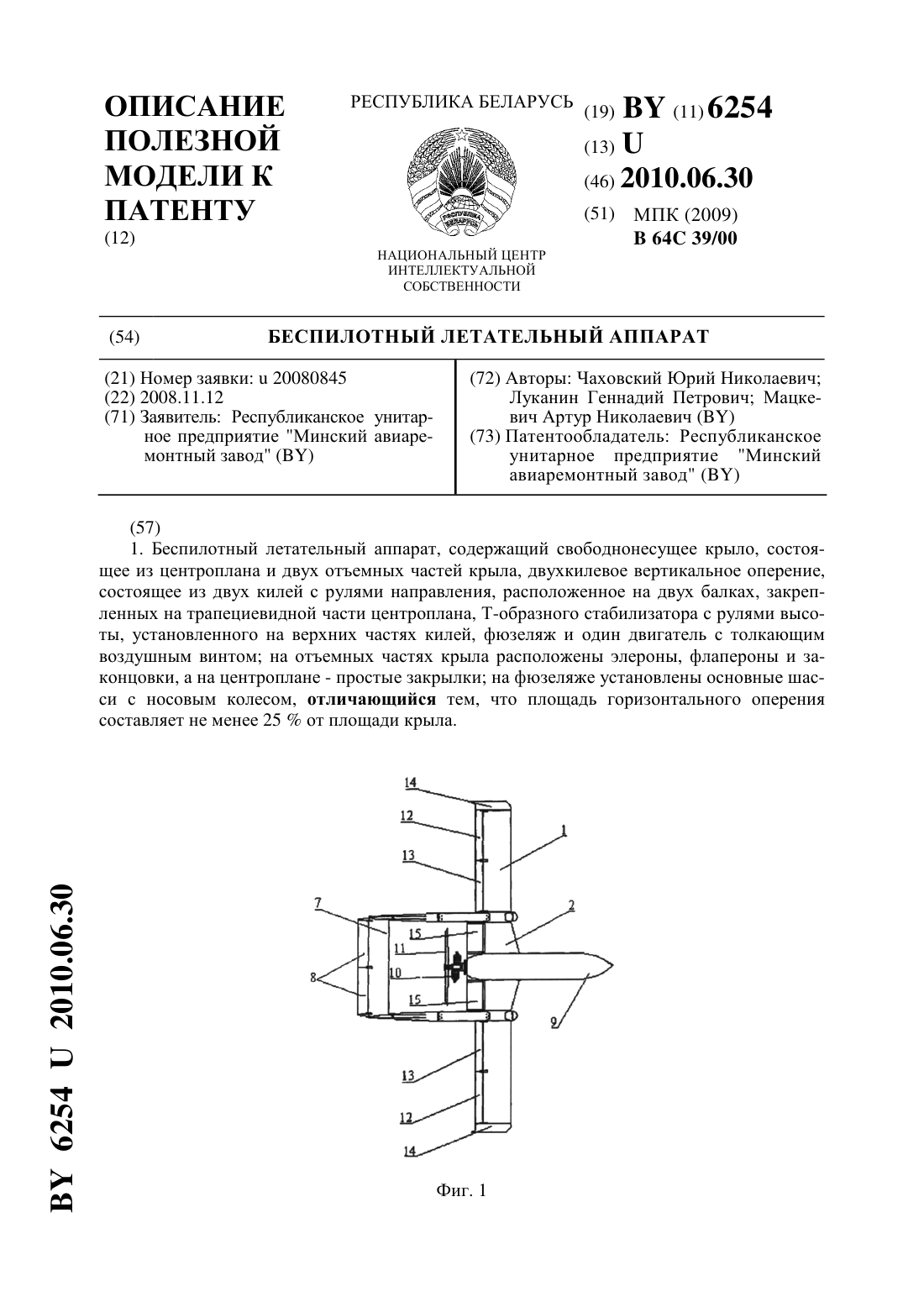
...высокие аэродинамические и функциональные (летно-технические) характеристики и,кроме того, высокую технологичность конструкции и простоту эксплуатации. Указанный технический результат достигается тем, что БПЛА выполнен по нормальной аэродинамической схеме с прямым крылом со складывающимися отъемными частями крыла и центропланом, имеющим наплыв в корневой части, крыло имеет элероны, флапероны и простые закрылки. Согласно изобретению, БПЛА...
Предыдущий патент: Бесплотинный наплавной гидроагрегат
Следующий патент: Спидометр электронный
Случайный патент: Способ хирургического лечения храпа