Система для регулирования выходной координаты динамического объекта
Номер патента: 8824
Опубликовано: 30.12.2006
Авторы: Мацкевич Артур Николаевич, Розсудовский Сергей Викторович

Текст
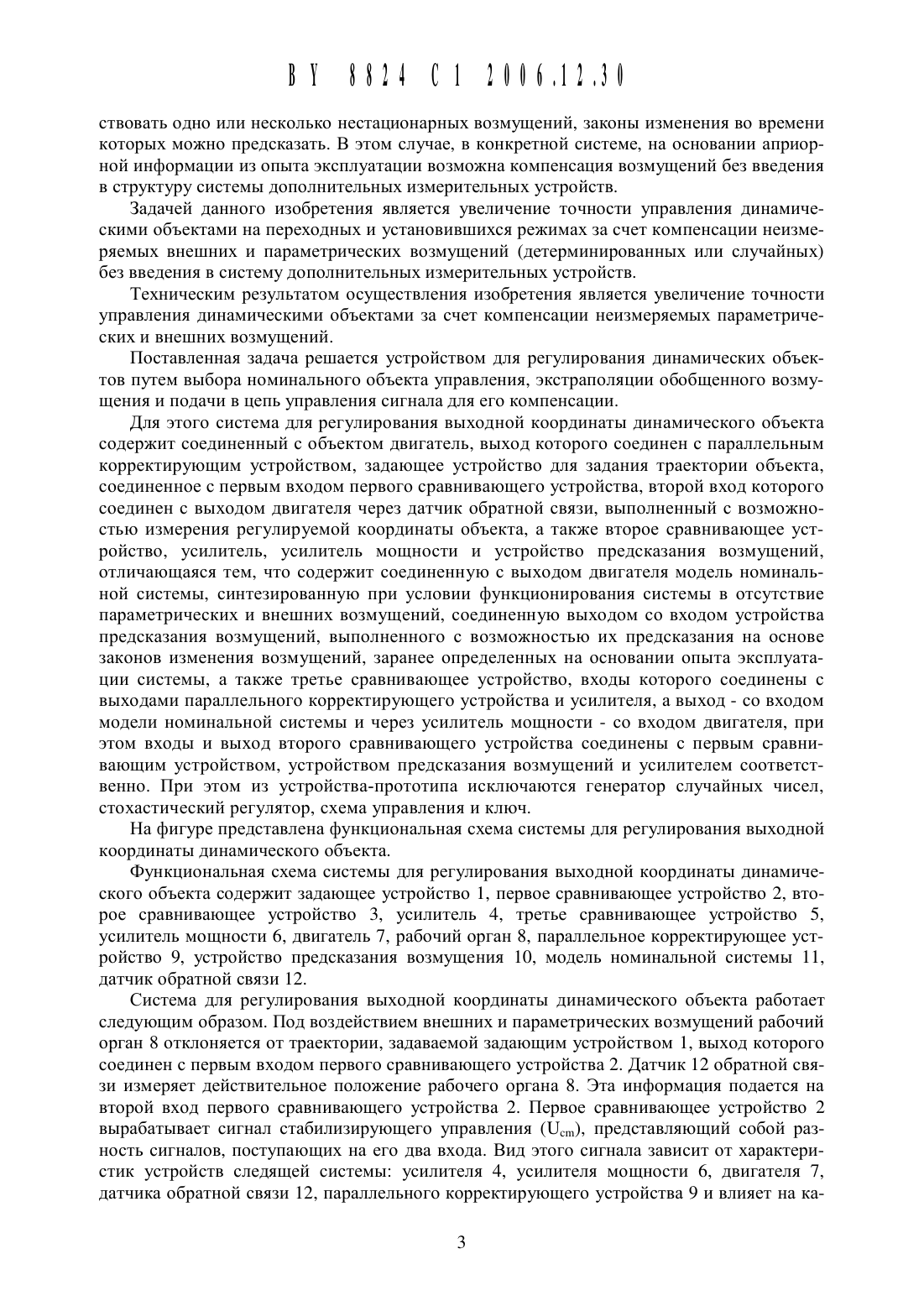
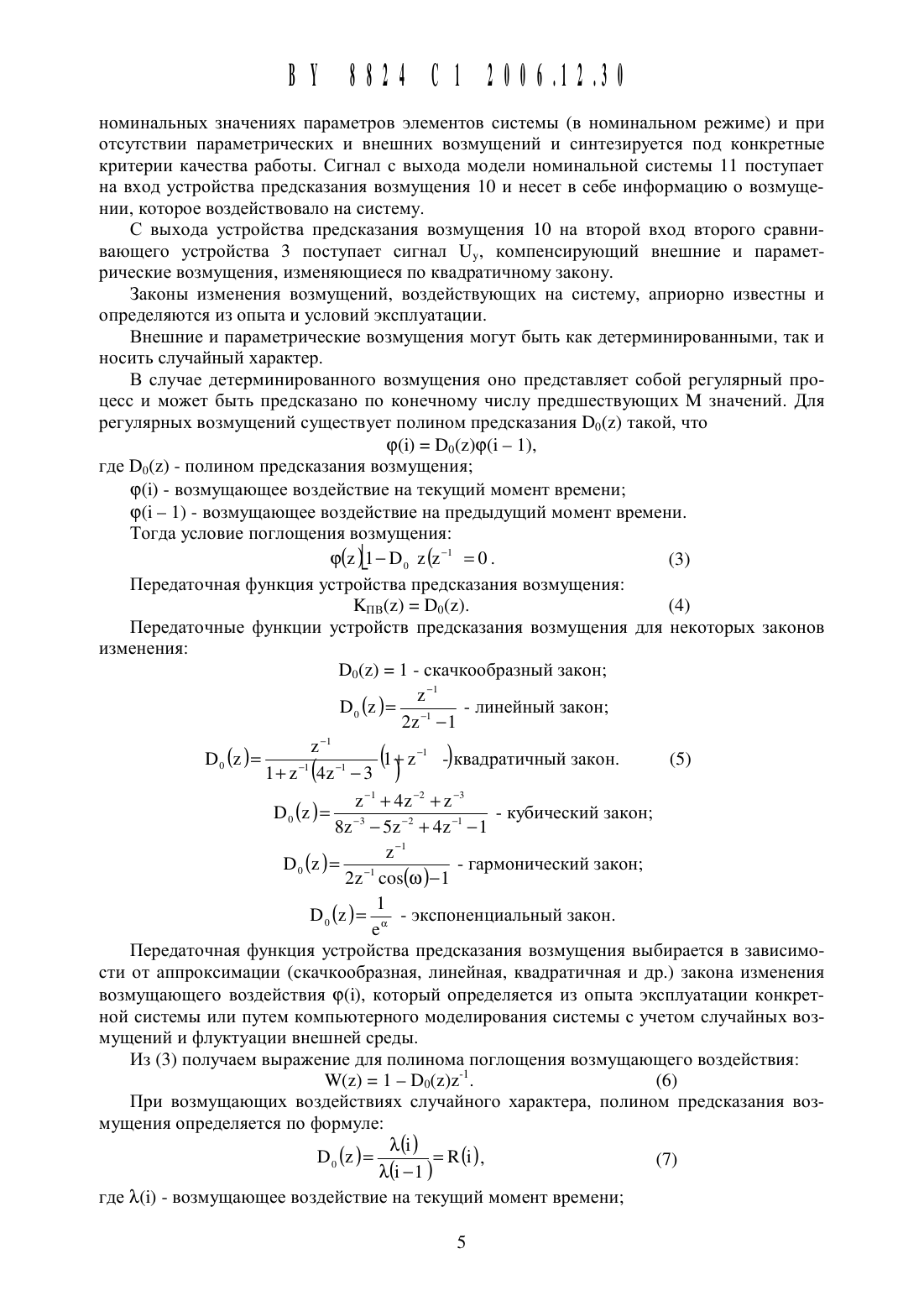
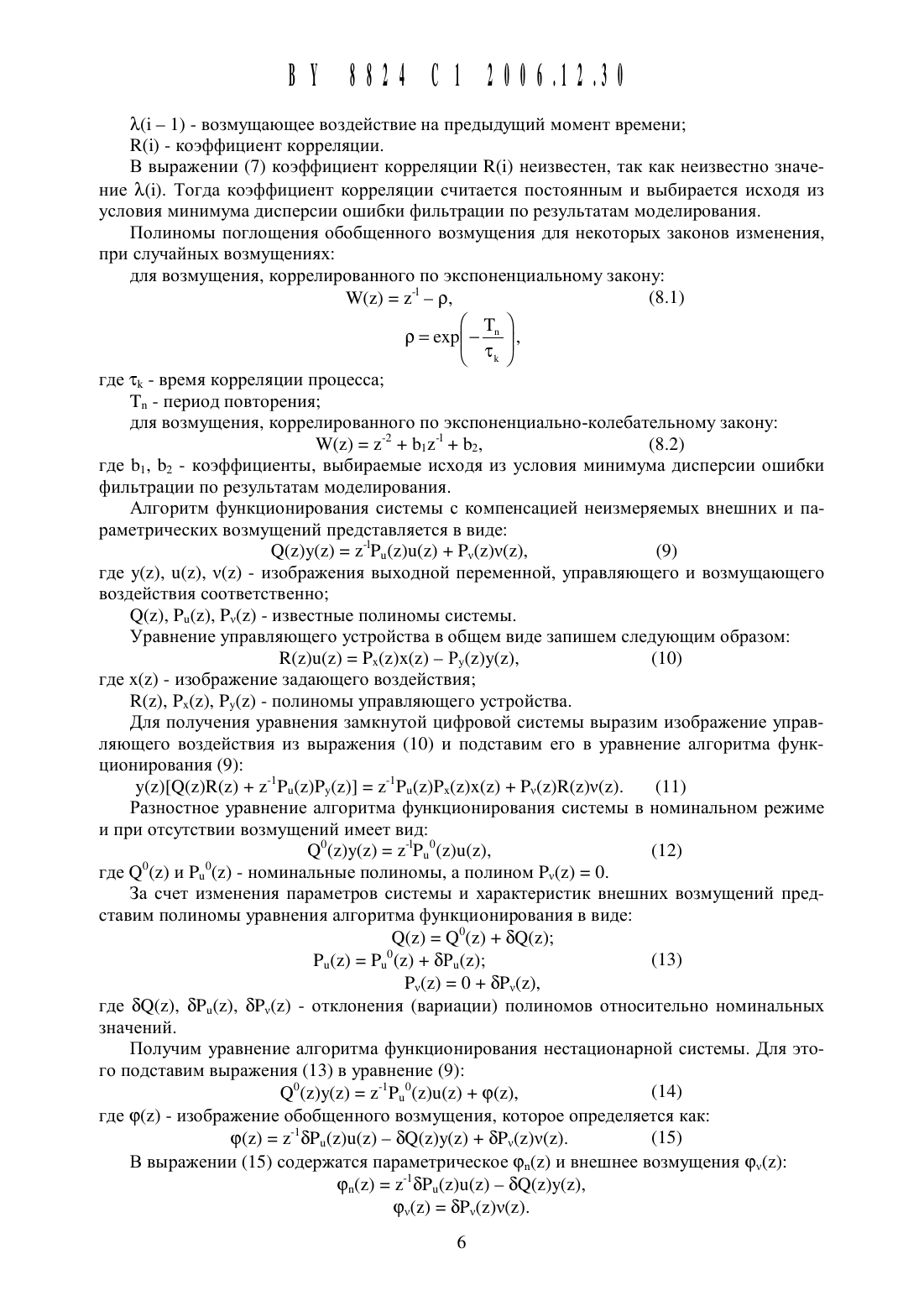
СИСТСМЫ, СИНТСЗИРОВЗННУЪО ПрИ УСЛОВИИ функционирования СИСТСМЫ В ОТСУТСТВИС параМСТрИЧССКИХ И ВНСШНИХ ВОЗМУ 1 ЦСНИЙ, СОСДИНСННУЪО ВЫХОДОМ СО ВХОДОМ устройства предсказания ВОЗМУЩСНИЙ, ВЫПОЛНСННОГО С ВОЗМОЖНОСТЬЮ ИХ ПРСДСКЗЗЗНИЯ на ОСНОВС законов ИЗМСНСНИЯ ВОЗМУЩСНИЙ, заранее ОПРСДСЛСННЫХ на основании опыта эксплуатации СИСТСМЫ, а также третье сравнивающее УСТРОЙСТВО, ВХОДЫ КОТОрОГО СОСДИНСНЫ С выходами параллельного КОРРСКТИРУЪОЩСГО устройства И УСИЛИТСЛЯ, а ВЫХОД - СО ВХОДОМ МОДСЛИ номинальной СИСТСМЫ И через УСИЛИТСЛЬ МОЩНОСТИ - СО ВХОДОМ двигателя, ПрИ ЭТОМ ВХОДЫ И ВЫХОД ВТОрОГО сравнивающего устройства СОСДИНСНЫ С первым сравнивающим УСТРОЙСТВОМ, УСТРОЙСТВОМ предсказания ВОЗМУЩСНИЙ И УСИЛИТСЛСМ СООТВСТСТВСННО.Изобретение относится К области автоматического регулирования, а именно К регулированию выходной Координаты динамических объектов и может быть использовано при управлении рабочими органами станков, летательных аппаратов и антенных постов.Известен способ регулирования динамических объектов путем измерения выходной координаты, сравнения измеренного значения с заданным, формирования управляющего сигнала на объект управления в соответствии с ошибкой регулирования выходной координаты (Васильев В.И. Многоуровневое управление динамическими объектами. - М. Наука, 1987. - С. 250). Операция этого способа осуществляется устройством, содержащим объект управления, выход которого соединен с инвертирующим входом блока сравнения выходной координаты с заданным значением, выход которого соединен с входом детерминированного цифрового регулятора, выход которого соединен с входом объекта управления.Недостатком указанного способа является недостаточная точность регулирования, поскольку он не учитывает влияние случайных возмущений и флуктуации внещней среды.Недостатком указанного устройства является то, что оно не позволяет учесть случайные возмущения и получить высокую точность регулирования, так как содержит детерминированный цифровой регулятор, а не стохастический.Наиболее близким техническим рещением, выбранным за прототип, является способ регулирования динамических объектов (РФ 2051401, МПК 6 О 5 В 11/01, 1995). Регулирование динамического объекта осуществляется за счет введения в устройство стохастического регулятора. Устройство содержит объект управления, выход которого соединен с инвертирующим входом блока сравнения выходной координаты с заданным значением,выход которого соединен с входом детерминированного регулятора, выход которого соединен с первым входом ключа, второй вход которого соединен с выходом стохастического регулятора, а выход соединен с входом объекта управления, выход которого соединен также с первым входом стохастического регулятора и с входом схемы управления ключом, выход которой соединен с управляющим входом ключа, а второй вход стохастического регулятора соединен с выходом генератора случайных чисел.Недостатком данного способа является то, что в основе формирования сигнала управления стохастического регулятора лежит выборочный метод Монте-Карло (Шеннон Р. Имитационное моделирование систем - искусство и наука. - М. Мир, 1978). Метод Монте-Карло по своему определению является вероятностным и не может гарантировать достаточную точность управления объектом, а диапазон компенсации ощибок управления объектом ограничен размерностью и дискретностью массива переходных вероятностей.Недостатком указанного устройства является то, что в его составе присутствует ключ на три входа, работа которого вносит в функционирование системы скачкообразное управление. Кроме того, данное устройство обеспечивает управление с указанным качеством только в установившихся режимах работы.Анализ условий функционирования систем управления динамическими объектами при нестационарных возмущениях показывает, что на конкретную систему может воздей 2ствовать одно или несколько нестационарных возмущений, законы изменения во времени которых можно предсказать. В этом случае, в конкретной системе, на основании априорной информации из опыта эксплуатации возможна компенсация возмущений без введения в структуру системы дополнительных измерительных устройств.Задачей данного изобретения является увеличение точности управления динамическими объектами на переходных и установившихся режимах за счет компенсации неизмеряемь 1 х внешних и параметрических возмущений (детерминированных или случайных) без введения в систему дополнительных измерительных устройств.Техническим результатом осуществления изобретения является увеличение точности управления динамическими объектами за счет компенсации неизмеряемых параметрических и внешних возмущений.Поставленная задача решается устройством для регулирования динамических объектов путем выбора номинального объекта управления, экстраполяции обобщенного возмущения и подачи в цепь управления сигнала для его компенсации.Для этого система для регулирования выходной координаты динамического объекта содержит соединенный с объектом двигатель, выход которого соединен с параллельным корректирующим устройством, задающее устройство для задания траектории объекта,соединенное с первым входом первого сравнивающего устройства, второй вход которого соединен с выходом двигателя через датчик обратной связи, выполненный с возможностью измерения регулируемой координаты объекта, а также второе сравнивающее устройство, усилитель, усилитель мощности и устройство предсказания возмущений,отличающаяся тем, что содержит соединенную с выходом двигателя модель номинальной системы, синтезированную при условии функционирования системы в отсутствие параметрических и внешних возмущений, соединенную выходом со входом устройства предсказания возмущений, выполненного с возможностью их предсказания на основе законов изменения возмущений, заранее определенных на основании опыта эксплуатации системы, а также третье сравнивающее устройство, входы которого соединены с выходами параллельного корректирующего устройства и усилителя, а выход - со входом модели номинальной системы и через усилитель мощности - со входом двигателя, при этом входы и выход второго сравнивающего устройства соединены с первым сравнивающим устройством, устройством предсказания возмущений и усилителем соответственно. При этом из устройства-прототипа исключаются генератор случайных чисел,стохастический регулятор, схема управления и ключ.На фигуре представлена функциональная схема системы для регулирования выходной координаты динамического объекта.Функциональная схема системы для регулирования выходной координаты динамического объекта содержит задающее устройство 1, первое сравнивающее устройство 2, второе сравнивающее устройство 3, усилитель 4, третье сравнивающее устройство 5,усилитель мощности 6, двигатель 7, рабочий орган 8, параллельное корректирующее устройство 9, устройство предсказания возмущения 10, модель номинальной системы 11,датчик обратной связи 12.Система для регулирования выходной координаты динамического объекта работает следующим образом. Под воздействием внешних и параметрических возмущений рабочий орган 8 отклоняется от траектории, задаваемой задающим устройством 1, выход которого соединен с первым входом первого сравнивающего устройства 2. Датчик 12 обратной связи измеряет действительное положение рабочего органа 8. Эта информация подается на второй вход первого сравнивающего устройства 2. Первое сравнивающее устройство 2 вырабатывает сигнал стабилизирующего управления (Ист) представляющий собой разность сигналов, поступающих на его два входа. Вид этого сигнала зависит от характеристик устройств следящей системы усилителя 4, усилителя мощности 6, двигателя 7,датчика обратной связи 12, параллельного корректирующего устройства 9 и влияет на ка 00 0024 01 2000.12.00чество переходных процессов в системе. Характеристики устройств системы выбираются на этапе ее синтеза исходя из основных требований К ней запасов устойчивости, точности, бь 1 стродействия. Передаточная функция параллельного Корректирующего устройствагде 24 - оператор задержки сигнала на один период повторения Кс - коэффициент преобразования стабилизирующей обратной связи КК - коэффициент преобразования корректирующей обратной связи тк - постоянная времени дискретного апериодического звена. Оператор задержки сигнала на один период повторения равенгде р - оператор преобразований Лапласа Т - период повторения дискретного сигнала. Преобразования Лапласа устанавливают связь между оригиналом (процессом) и егоСигнал на выходе параллельного корректирующего устройства 9 за счет использования закона управления (1) содержит информацию о скорости и ускорении изменения положения рабочего органа 8. Передаточная функция параллельного корректирующего устройства (1) содержит в первом слагаемом одно разностное звено 1 24, а во втором слагаемом в числителе - два разностных звена (1 21)2. Разностное звено характеризует скорость изменения процесса, два разностных звена - ускорение изменения процесса. Дискретное апериодическое звено 1 тк(1 2-1) обеспечивает устойчивость работы системы.Сигнал Ист с выхода первого сравнивающего устройства 2 подается на первый вход второго сравнивающего устройства 3. На второй вход второго сравнивающего устройства подается сигнал управления Ну, компенсирующий внещние и параметрические возмущения. Второе сравнивающее устройство 3 вырабатывает сигналП Ист Ну, который обеспечивает требуемое качество переходных процессов в системе и компенсацию неизмеряемых внещних и параметрических возмущений. Сигнал управления П с вь 1 хода второго сравнивающего устройства 3 подается на вход усилителя 4, где усиливается и подается на первый вход третьего сравнивающего устройства 5. На второй вход третьего сравнивающего устройства подается сигнал с выхода параллельного корректирующего устройства 9, преобразующего сигнал о действительном положении рабочего органа 8. Третье сравнивающее устройство 5 вырабатывает сигнал, который представляет собой разность сигналов, поступающих на его два входа. Сигнал с выхода сравнивающего устройства 5 подается на вход усилителя мощности 6 и усиливается там по мощности. С вь 1 хода усилителя мощности 6 сигнал подается на двигатель 7, который изменяет положение рабочего органа 8 таким образом, чтобы уменьшить рассогласование между требуемым и действительным положением рабочего органа 8, причем этот процесс должен идти с требуемым качеством. Сигнал с третьего сравнивающего устройства 5 поступает на первый вход модели номинальной системы 11. На второй вход модели номинальной системы поступает сигнал с выхода двигателя 7. Модель номинальной системы 11 определяется приноминальных значениях параметров элементов системы (в номинальном режиме) и при отсутствии параметрических и внещних возмущений и синтезируется под Конкретные критерии качества работы. Сигнал с выхода модели номинальной системы 11 поступает на вход устройства предсказания возмущения 10 и несет в себе информацию о возмущении, которое воздействовало на систему.С выхода устройства предсказания возмущения 10 на второй вход второго сравнивающего устройства 3 поступает сигнал Ну, компенсирующий внещние и параметрические возмущения, изменяющиеся по квадратичному закону.Законы изменения возмущений, воздействующих на систему, априорно известны и определяются из опыта и условий эксплуатации.Внешние и параметрические возмущения могут быть как детерминированными, так и носить случайный характер.В случае детерминированного возмущения оно представляет собой регулярный процесс и может быть предсказано по конечному числу предшествующих М значений. Для регулярных возмущений существует полином предсказания Во(2) такой, чтор(1) - возмущающее воздействие на текущий момент временир(1 1) - возмущающее воздействие на предыдущий момент времени.Тогда условие поглощения возмущенияр(201 В 2(21 О. (3) Передаточная функция устройства предсказания возмущения Кпв(2) 130(2)- (4)Передаточные функции устройств предсказания возмущения для некоторых законов изменения В 0(2) 1 - скачкообразный законПередаточная функция устройства предсказания возмущения выбирается в зависимости от аппроксимации (скачкообразная, линейная, квадратичная и др.) закона изменения возмущающего воздействия р(1), который определяется из опыта эксплуатации конкретной системы или путем компьютерного моделирования системы с учетом случайных возмущений и флуктуации внещней среды.Из (3) получаем выражение для полинома поглощения возмущающего воздействияПри возмущающих воздействиях случайного характера, полином предсказания воз мущения определяется по формулегде Мй) - возмущающее воздействие на текущий момент времени
МПК / Метки
МПК: G05B 11/01, G05B 17/02
Метки: выходной, координаты, система, объекта, динамического, регулирования
Код ссылки
<a href="https://by.patents.su/7-8824-sistema-dlya-regulirovaniya-vyhodnojj-koordinaty-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Система для регулирования выходной координаты динамического объекта</a>
Следящая система автоматического управления с компенсацией неизмеряемых скачкообразных возмущений
Номер патента: U 1002
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Ганэ Вадим Арведович
МПК: G05B 11/01
Метки: компенсацией, возмущений, неизмеряемых, следящая, управления, скачкообразных, система, автоматического
Текст:
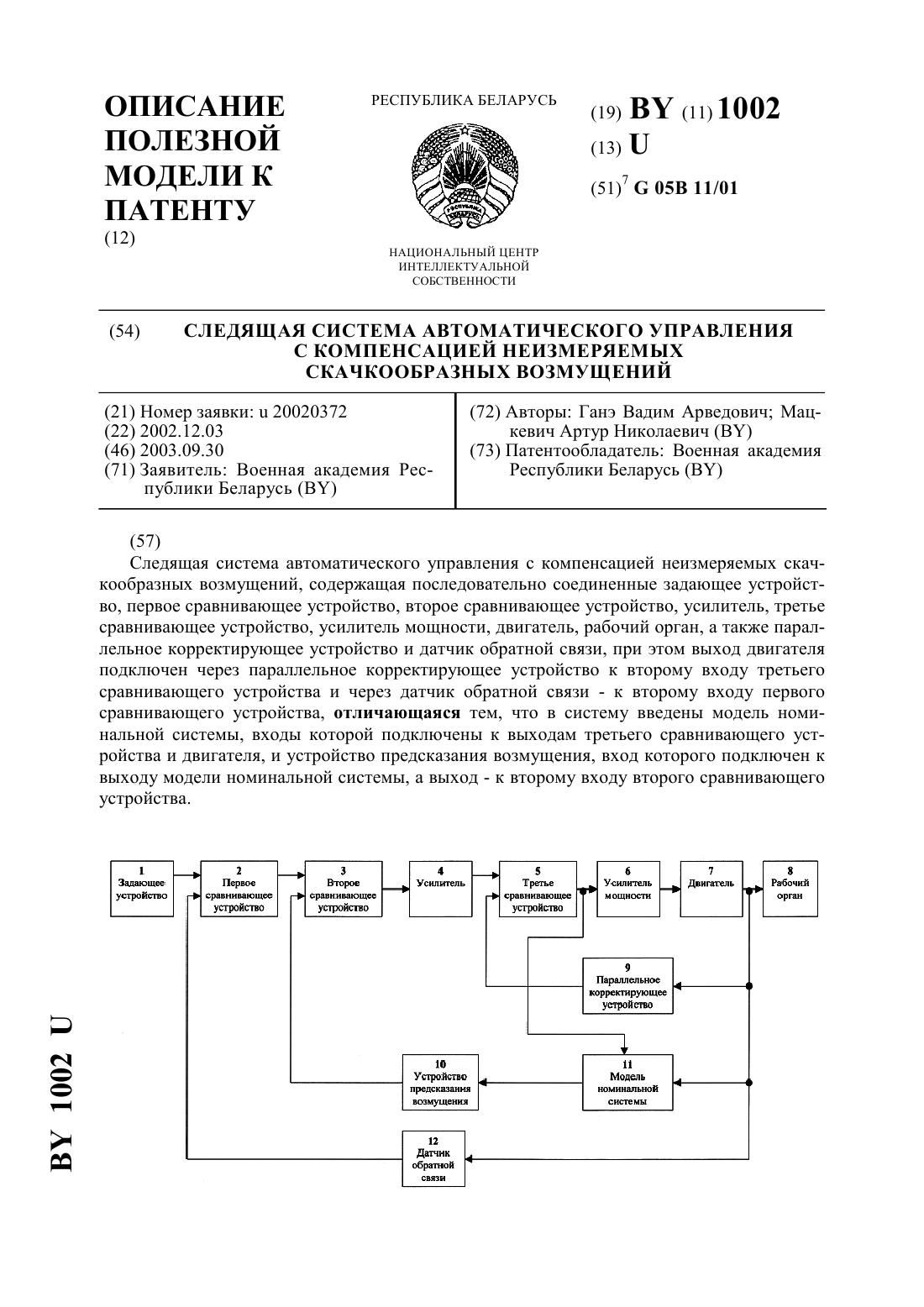
...второму входу первого сравнивающего устройства, и отличается от прототипа тем, что в систему введены модель номинальной системы, входы которой подключены к выходам третьего сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фигуре представлена функциональная схема ССАУ с компенсацией неизмеряемых...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону

Номер патента: U 1000
Опубликовано: 30.09.2003
Авторы: Санько Андрей Анатольевич, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: квадратичному, возмущений, неизмеряемых, система, компенсацией, управления, следящая, автоматического, изменяющихся, закону
Текст:
...сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу второго сравнивающего устройства. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по квадратичному закону, а на фиг. 2 - структурная схема устройства предсказания возмущения. ССАУ содержит задающее устройство 1, первое...
Следящая система автоматического управления с компенсацией неизмеряемых линейно изменяющихся во времени возмущений
Номер патента: U 1001
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: времени, возмущений, изменяющихся, автоматического, неизмеряемых, система, управления, следящая, компенсацией, линейно
Текст:
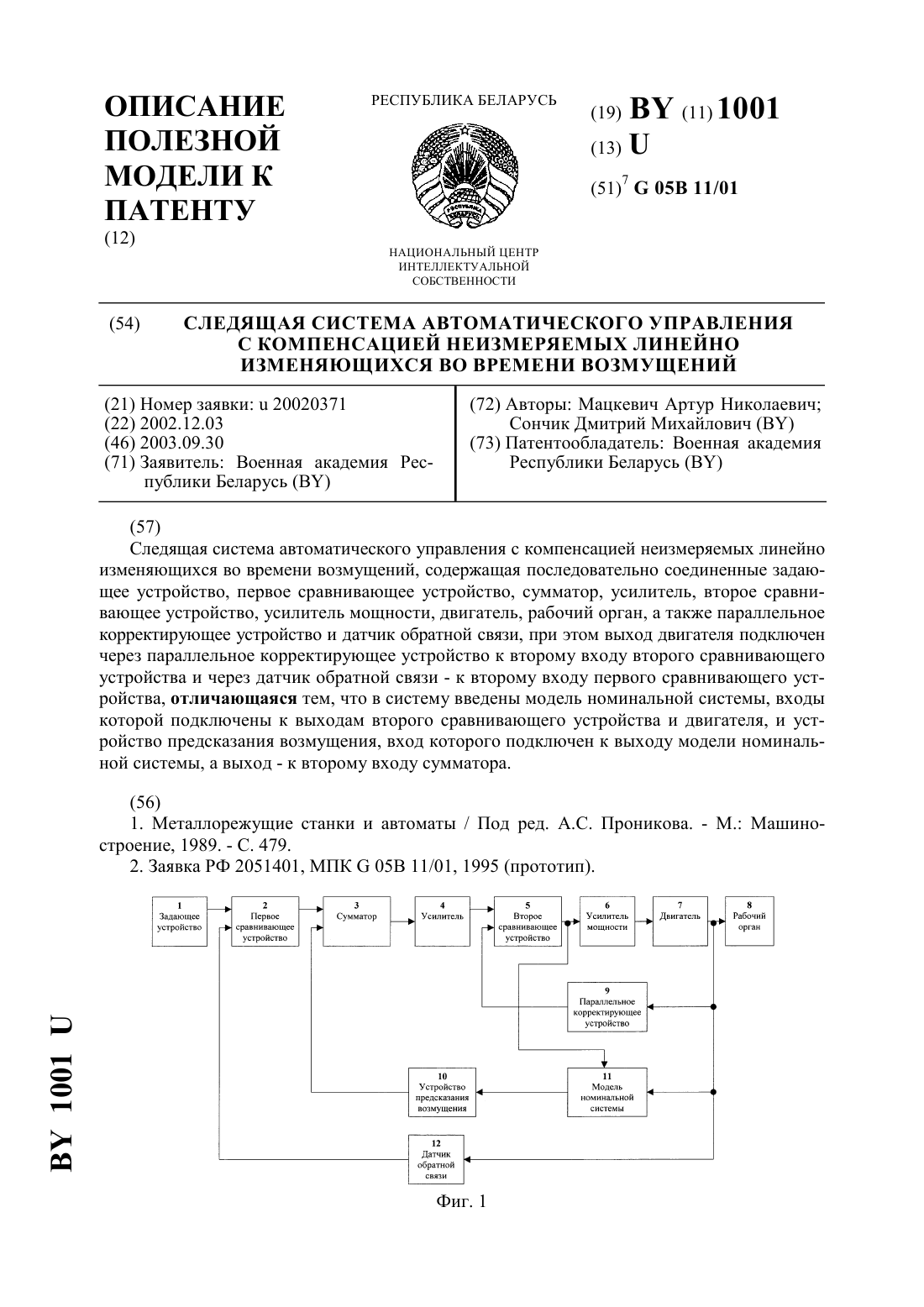
...введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых линейно изменяющихся во времени возмущений, а на фиг. 2 - структурная схема устройства предсказания возмущения....
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по гармоническому закону

Номер патента: U 1005
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Розсудовский Сергей Викторович
МПК: G05B 11/01
Метки: компенсацией, неизмеряемых, возмущений, система, следящая, закону, управления, автоматического, изменяющихся, гармоническому
Текст:
...которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по гармоническому закону, а на фиг. 2 - структурная схема устройства предсказания возмущения. ССАУ содержит задающее устройство 1,...
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по кубическому закону

Номер патента: U 1003
Опубликовано: 30.09.2003
Авторы: Мацкевич Артур Николаевич, Розсудовский Сергей Викторович
МПК: G05B 11/01
Метки: кубическому, управления, следящая, система, изменяющихся, автоматического, неизмеряемых, компенсацией, закону, возмущений
Текст:
...в систему введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по кубическому закону, а на фиг. 2 - структурная схема устройства предсказания...
Предыдущий патент: Убирающий модуль сельскохозяйственной машины
Следующий патент: Жатка
Случайный патент: Комплекс включения S-омепразола (эсомепразола) с циклодекстрином