Способ сопровождения целей и устройство для его реализации
Номер патента: 16975
Опубликовано: 30.04.2013
Авторы: Каранчук Елена Олеговна, Васковская Лидия Федоровна, Галуза Алексей Сергеевич, Короленко Владимир Анатольевич
Текст
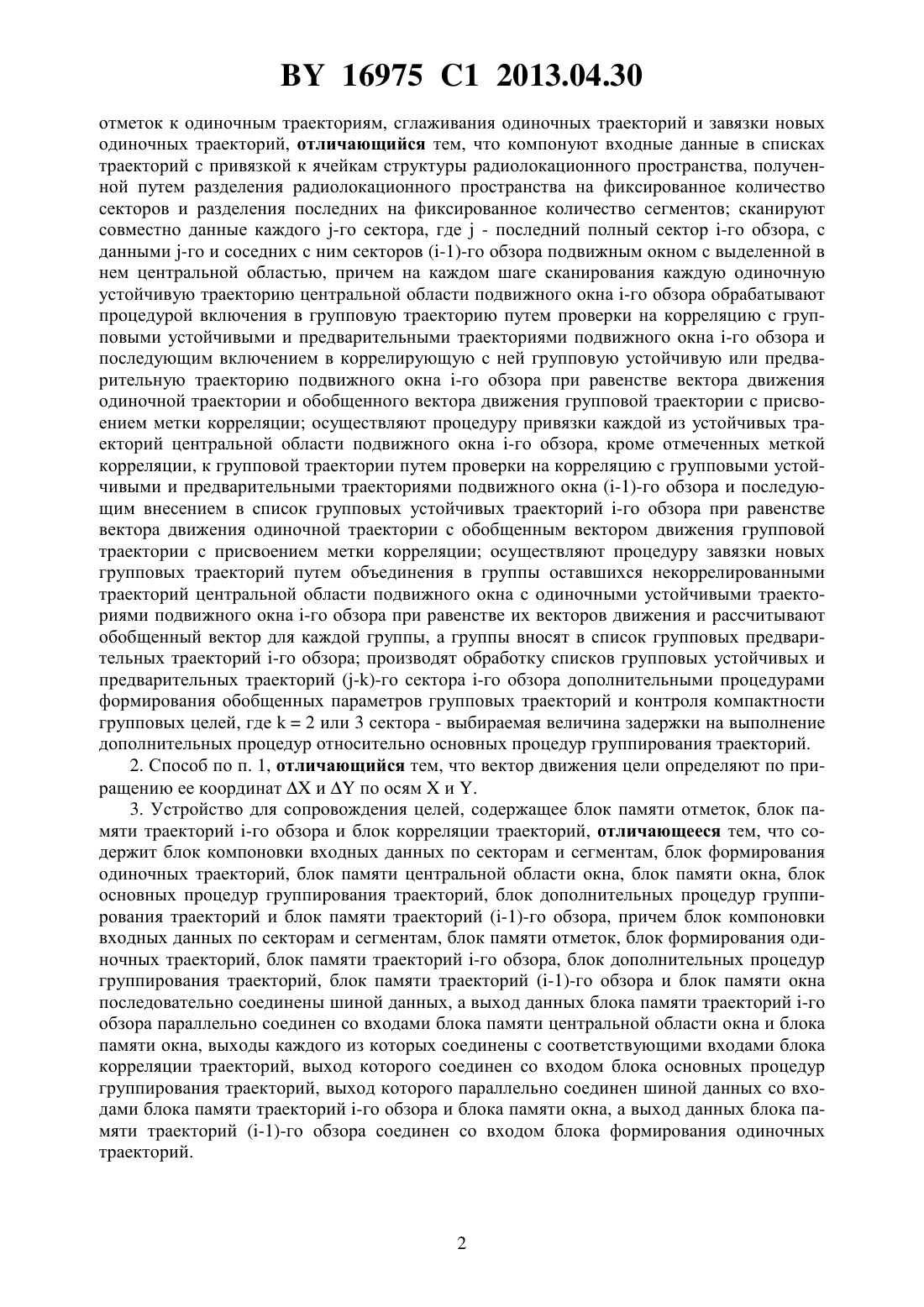
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ(71) Заявитель Открытое акционерное общество АГАТ - системы управления - управляющая компания холдинга Геоинформационные системы управления(72) Авторы Васковская Лидия Федоровна Галуза Алексей Сергеевич Каранчук Елена Олеговна Короленко Владимир Анатольевич(73) Патентообладатель Открытое акционерное общество АГАТ - системы управления - управляющая компания холдинга Геоинформационные системы управления(56) Фарина А. и др. Цифровая обработка радиолокационной информации. Сопровождение целей. - М. Радио и связь, 1993. - С. 26-27, 183-184.2032916 1, 1995.20090838, 2010.2207589 2, 2003.2052836 1, 1996.92015340 , 1995.7218270 1, 2007.0334560 2, 1989.(57) 1. Способ сопровождения целей, при котором формируют списки одиночных устойчивых и предварительных траекторий целей -го обзора радиолокационного пространства радиолокационной станцией путем обработки входных данных процедурами привязки 16975 1 2013.04.30 отметок к одиночным траекториям, сглаживания одиночных траекторий и завязки новых одиночных траекторий, отличающийся тем, что компонуют входные данные в списках траекторий с привязкой к ячейкам структуры радиолокационного пространства, полученной путем разделения радиолокационного пространства на фиксированное количество секторов и разделения последних на фиксированное количество сегментов сканируют совместно данные каждого -го сектора, где- последний полный сектор -го обзора, с данными -го и соседних с ним секторов (-1)-го обзора подвижным окном с выделенной в нем центральной областью, причем на каждом шаге сканирования каждую одиночную устойчивую траекторию центральной области подвижного окна -го обзора обрабатывают процедурой включения в групповую траекторию путем проверки на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна -го обзора и последующим включением в коррелирующую с ней групповую устойчивую или предварительную траекторию подвижного окна -го обзора при равенстве вектора движения одиночной траектории и обобщенного вектора движения групповой траекторииприсвоением метки корреляции осуществляют процедуру привязки каждой из устойчивых траекторий центральной области подвижного окна -го обзора, кроме отмеченных меткой корреляции, к групповой траектории путем проверки на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна (-1)-го обзора и последующим внесением в список групповых устойчивых траекторий -го обзора при равенстве вектора движения одиночной траектории с обобщенным вектором движения групповой траектории с присвоением метки корреляции осуществляют процедуру завязки новых групповых траекторий путем объединения в группы оставшихся некоррелированными траекторий центральной области подвижного окна с одиночными устойчивыми траекториями подвижного окна -го обзора при равенстве их векторов движения и рассчитывают обобщенный вектор для каждой группы, а группы вносят в список групповых предварительных траекторий -го обзора производят обработку списков групповых устойчивых и предварительных траекторий (-)-го сектора -го обзора дополнительными процедурами формирования обобщенных параметров групповых траекторий и контроля компактности групповых целей, где 2 или 3 сектора - выбираемая величина задержки на выполнение дополнительных процедур относительно основных процедур группирования траекторий. 2. Способ по п. 1, отличающийся тем, что вектор движения цели определяют по приращению ее координатипо осями . 3. Устройство для сопровождения целей, содержащее блок памяти отметок, блок памяти траекторий -го обзора и блок корреляции траекторий, отличающееся тем, что содержит блок компоновки входных данных по секторам и сегментам, блок формирования одиночных траекторий, блок памяти центральной области окна, блок памяти окна, блок основных процедур группирования траекторий, блок дополнительных процедур группирования траекторий и блок памяти траекторий (-1)-го обзора, причем блок компоновки входных данных по секторам и сегментам, блок памяти отметок, блок формирования одиночных траекторий, блок памяти траекторий -го обзора, блок дополнительных процедур группирования траекторий, блок памяти траекторий (-1)-го обзора и блок памяти окна последовательно соединены шиной данных, а выход данных блока памяти траекторий -го обзора параллельно соединен со входами блока памяти центральной области окна и блока памяти окна, выходы каждого из которых соединены с соответствующими входами блока корреляции траекторий, выход которого соединен со входом блока основных процедур группирования траекторий, выход которого параллельно соединен шиной данных со входами блока памяти траекторий -го обзора и блока памяти окна, а выход данных блока памяти траекторий (-1)-го обзора соединен со входом блока формирования одиночных траекторий. 16975 1 2013.04.30 Изобретение относится к радиолокации и может быть использовано в автоматизированных системах обработки радиолокационной информации. Известен способ сопровождения целей 1, при котором формируют списки одиночных устойчивых и предварительных траекторий целей -го (текущего) обзора радиолокационного пространства радиолокационной станцией путем обработки входных данных процедурами привязки отметок к одиночным траекториям, сглаживания одиночных траекторий и завязки новых одиночных траекторий. Недостатком известного способа является отсутствие возможности сопровождения групповых целей. Известный способ имеет наиболее близкое техническое решение к заявляемому способу и является его прототипом. Известно устройство радиолокационного автозахвата и автосопровождения движущихся воздушных объектов 2, содержащее запоминающее устройство отметок от целей (блок памяти отметок), запоминающее устройство вариантов траекторий (блок памяти траекторий-го обзора) и блок сопоставления (блок корреляции траекторий). Недостатком известного устройства является отсутствие возможности сопровождения групповых целей. Известное устройство имеет наиболее близкое техническое решение к заявляемому устройству и является его прототипом. Технической задачей заявляемого изобретения является расширение функциональных возможностей автоматизированной системы обработки радиолокационной информации. Поставленная задача решена со следующим техническим результатом обеспечено сопровождение групповых целей. Для достижения указанного технического результата в способе сопровождения целей формируют списки одиночных устойчивых и предварительных траекторий целей -го обзора радиолокационного пространства радиолокационной станцией путем обработки входных данных процедурами привязки отметок к одиночным траекториям, сглаживания одиночных траекторий и завязки новых одиночных траекторий и дополнительно компонуют входные данные в списках траекторий с привязкой к ячейкам структуры радиолокационного пространства, полученной путем разделения радиолокационного пространства на фиксированное количество секторов и разделения последних на фиксированное количество сегментов сканируют совместно данные каждого -го сектора, где- последний полный сектор -го обзора, с данными -го и соседних с ним секторов (-1)-го обзора подвижным окном с выделенной в нем центральной областью, причем на каждом шаге сканирования каждую одиночную устойчивую траекторию центральной области подвижного окна -го обзора обрабатывают процедурой включения в групповую траекторию путем проверки на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна -го обзора и последующим включением в коррелирующую с ней групповую устойчивую или предварительную траекторию подвижного окна -го обзора при равенстве вектора движения одиночной траектории и обобщенного вектора движения групповой траектории с присвоением метки корреляции осуществляют процедуру привязки каждой из устойчивых траекторий центральной области подвижного окна -го обзора, кроме отмеченных меткой корреляции, к групповой траектории путем проверки на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна (-1)-го обзора и последующим внесением в список групповых устойчивых траекторий -го обзора при равенстве вектора движения одиночной траектории с обобщенным вектором движения групповой траектории с присвоением метки корреляции осуществляют процедуру завязки новых групповых траекторий путем объединения в группы оставшихся некоррелированными траекторий центральной области подвижного окна с одиночными устойчивыми траекториями подвижного окна -го обзора при равенстве их векторов движения и рассчитывают обобщенный вектор для каждой группы, а группы вносят в список групповых предварительных траекторий -го обзора производят обработку списков групповых устойчивых и предварительных траекторий (-)-го сектора -го об 3 16975 1 2013.04.30 зора дополнительными процедурами формирования обобщенных параметров групповых траекторий и контроля компактности групповых целей, где 2 или 3 сектора - выбираемая величина задержки на выполнение дополнительных процедур относительно основных процедур группирования траекторий. При этом вектор движения цели определяют по приращению ее координатипо осями . Для достижения указанного технического результата в устройство для сопровождения целей, содержащее блок памяти отметок, блок памяти траекторий -го обзора и блок корреляции траекторий, дополнительно введены блок компоновки входных данных по секторам и сегментам, блок формирования одиночных траекторий, блок памяти центральной области подвижного окна, блок памяти подвижного окна, блок основных процедур группирования траекторий, блок дополнительных процедур группирования траекторий и блок памяти траекторий (-1)-го обзора, причем блок компоновки входных данных по секторам и сегментам, блок памяти отметок, блок формирования одиночных траекторий, блок памяти траекторий -го обзора, блок дополнительных процедур группирования траекторий,блок памяти траекторий (-1)-го обзора и блок памяти подвижного окна последовательно соединены шиной данных, а выход данных блока памяти траекторий -го обзора параллельно соединен со входами блока памяти центральной области подвижного окна и блока памяти подвижного окна, выходы каждого из которых соединены с соответствующими входами блока корреляции траекторий, выход которого соединен со входом блока основных процедур группирования траекторий, выход которого параллельно соединен шиной данных со входами блока памяти траекторий -го обзора и блока памяти подвижного окна,а выход данных блока памяти траекторий (-1)-го обзора соединен со входом блока формирования одиночных траекторий. Заявляемое изобретение представлено на чертеже в виде структурной схемы. Заявляемый способ сопровождения целей состоит в следующем. Входные данные обрабатывают такими процедурами сопровождения одиночных целей, как привязка отметок к одиночным траекториям (-1)-го обзора, сглаживание одиночных траекторий и завязка новых одиночных траекторий, в результате которых формируют списки одиночных устойчивых и предварительных траекторий целей -го обзора. Данные в списках траекторий компонуют с привязкой к ячейкам структуры радиолокационного пространства, которую организуют однократно путем разделения радиолокационного пространства на фиксированное количество секторов и разделения секторов по длине на фиксированное количество сегментов. Указанные процедуры сопровождения выполняют после приема данных каждого сектора пространства. Все одиночные устойчивые траектории -го сектора дополнительно обрабатывают такими основными процедурами группирования, как включение в групповую траекторию,привязка к групповой траектории и завязка новых групповых траекторий. Приоритет исполнения перечисленных процедур группирования - в порядке их перечисления. Для реализации процедур группирования организуют шаговое сканирование данных каждого -го сектора -го обзора совместно с данными -го и соседних с ним секторов (-1)-го обзора подвижным окном с выделенной в нем центральной областью. Все процедуры группирования выполняют на каждом шаге сканирования. После сканирования подвижным окном каждого -го сектора производят обработку списков групповых траекторий (-)-го сектора -го обзора такими дополнительными процедурами, как формирование обобщенных параметров групповых траекторий и контроль компактности групповых целей. Такова укрупненная схема (состав и последовательность процедур) способа сопровождения целей. Под групповой целью будем понимать два и более воздушных объекта, летящих в течение некоторого времени компактно, с одинаковыми скоростью и курсом. Основными 4 16975 1 2013.04.30 параметрами одиночных траекторий списков, которые в дальнейшем используются для формирования групповых траекторий, являются текущие координаты цели (неэкстраполированные) и значение вектора движения цели. Вектор движения характеризуется длиной вектора (перемещение за один оборот) и направлением перемещения. В случае использования декартовых координат исходными данными при определении вектора движения являются приращения координатипо осями . Предполагая, что при равенстве исходных данных будут равны и производные от них параметры, можно для упрощения расчетов использовать в качестве вектора движения приращенияи . Формат подвижного окна - 33 сегмента, размер центральной области подвижного окна - один сегмент, длина шага - один сегмент. Ширинасектора и, соответственно,сегмента на большей части длины сектора должна удовлетворять выражению 2, где- расстояние, проходимое летательным объектом за один обзор с максимальной для обслуживаемых объектов скоростью. Длина сегментаориентировочно равна 2. Такие размеры сегмента позволят сохранить летательный объект в пределах подвижного окна в течение не менее двух обзоров, за счет чего сохранится непрерывность траекторий даже при пропуске обзора. В каждом новом шаге сканирования первой выполняют процедуру включения одиночных траекторий в групповые траектории, в которой проверяют все одиночные устойчивые траектории центральной области подвижного окна -го обзора на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна -го обзора. В случае положительного исхода каждую одиночную траекторию включают в коррелирующую с ней групповую траекторию. Критерием корреляции пары траекторий(одиночная - групповая) является равенство вектора движения одиночной траектории и обобщенного вектора движения групповой траектории. После процедуры включения на каждом шаге сканирования проводят процедуру привязки к существующим групповым траекториям, в которой все одиночные устойчивые траектории центральной области подвижного окна -го обзора с отрицательным исходом процедуры включения проверяют на корреляцию с групповыми устойчивыми и предварительными траекториями подвижного окна (-1)-го обзора по критерию равенства вектора движения одиночной траектории с обобщенным вектором движения групповой траектории. При положительном исходе проверки на корреляцию одиночную траекторию вместе с обобщенным вектором движения коррелирующей с ней групповой траектории вносят в список групповых устойчивых траекторий -го обзора. После каждого положительного исхода процедуры привязки повторяют процедуру включения оставшихся траекторий центральной области подвижного окна во вновь образованную групповую устойчивую траекторию -го обзора. Оставшиеся некоррелированными после групповых процедур включения и привязки устойчивые траектории центральной области подвижного окна на данном шаге сканирования обрабатывают процедурой завязки новых групповых траекторий, в которой каждую из оставшихся одиночных устойчивых траекторий центральной области подвижного окна-го обзора объединяют в группу с одной из одиночных устойчивых траекторий всего подвижного окна -го обзора по критерию равенства их векторов движения, рассчитывают обобщенный вектор движения для группы, группу вносят в список групповых предварительных траекторий -го обзора. После каждого положительного исхода процедуры завязки повторяют процедуру включения оставшихся траекторий центральной области подвижного окна во вновь образованную групповую предварительную траекторию -го обзора. Во всех групповых процедурах критерием корреляции траекторий является равенство их векторов движения, что при положительном исходе свидетельствует о равенстве скоростей и курсов воздушных объектов, что характерно для групповых целей. 5 16975 1 2013.04.30 Предложенные основные процедуры группирования составляют функционально полный набор процедур для образования траекторий групповых целей и дальнейшего их автоматического сопровождения. В процедуре завязки групповых траекторий организуется новая траектория по групповой цели, которая не наблюдалась в предыдущих обзорах. В результате этой процедуры зарождается групповая предварительная траектория из двух одиночных устойчивых траекторий. В процедуре привязки к групповой траектории организуется групповая устойчивая траектория из одной одиночной устойчивой траектории по новой в текущем обзоре групповой цели, имеющей прототип в предшествующих обзорах в виде групповой устойчивой или предварительной траектории. Эта процедура изменяет статус траектории-прототипа с предварительной траектории на устойчивую, обеспечивает связь траекторий текущего и предшествующих обзоров, т.е. автоматическое сопровождение целей. В процедуре включения в групповую траекторию, вновь организованную в процедуре завязки или привязки, вносятся остальные одиночные траектории подвижного окна -го обзора, удовлетворяющие критерию группирования для соответствующей процедуры. Посредством основных процедур группирования список групповых траекторий каждого -го обзора формируется заново, поэтому специальной процедуры сброса траекторий групповых целей не требуется. Для упомянутых выше дополнительных процедур (формирование обобщенных параметров групповых траекторий и контроль компактности групповых целей) характерно то,что каждая из них может выполняться только над полностью сформированной групповой целью. Поскольку элементы групповой цели могут располагаться в нескольких соседних секторах, то дополнительные процедуры должны выполняться с некоторой задержкой (на 2 или 3 сектора) относительно основных процедур группирования траекторий, чтобы дать возможность основным процедурам завершить формирование групповых целей. В процедуре формирования обобщенных параметров групповых траекторий рассчитывают координаты центра масс, обобщенный вектор движения, линейный размер группы и др. Исходными данными для их расчета являются векторы движения и конечные координаты одиночных траекторий, входящих в состав групповой траектории. В процедуре контроля компактности групповой цели сравнивают рассчитанный ранее линейный размер группы с допустимым линейным размером. Компактность группы является характерным признаком групповой цели, поэтому при превышении рассчитанного размера над допустимым из состава групповой цели исключают одну или несколько наиболее удаленных одиночных траекторий. Процедуры определения групповых параметров и контроля компактности просты в исполнении и не требуют дополнительных пояснений. Достоинствами заявляемого способа сопровождения целей является то, что он обладает новым качеством - формирует траектории групповых целей, и, кроме этого, одиночные траектории из состава групповых траекторий имеют индивидуальные характеристики одиночных траекторий (в списке одиночных устойчивых траекторий). Заявляемое устройство для сопровождения целей содержит блок 1 компоновки входных данных по секторам и сегментам, блок 2 памяти отметок, блок 3 формирования одиночных траекторий, блок 4 памяти траекторий -го обзора, блок 5 памяти центральной области подвижного окна, блок 6 корреляции траекторий, блок 7 основных процедур группирования траекторий, блок 8 памяти подвижного окна, блок 9 дополнительных процедур группирования траекторий, блок 10 памяти траекторий (-1)-го обзора. Соединены последовательно шиной данных блоки 1, 2, 3, 4, 9, 10, 8. Выход данных блока 4 соединен параллельно со входами блоков 5 и 8, выходы каждого из которых соединены раздельно со входами блока 6, выход которого соединен со входом блока 7. Выход блока 7 соединен шиной данных параллельно со входами блоков 4 и 8. Выход данных блока 10 соединен со входом блока 3. Устройство для сопровождения целей работает следующим образом. 16975 1 2013.04.30 Входные данные в цифровой форме, содержащие сведения о координатах и других характеристиках воздушных объектов, поступают на вход блока 1 компоновки входных данных по секторам и сегментам в очередности сканирования радиолокационного пространства радиолокационной станцией. В блоке 1 компоновки входных данных по секторам и сегментам по координатам определяется номер сегмента пространства, и данные об объекте записывают в массив памяти отметок блока 2, соответствующий номеру сегмента. В результате, в массивах блока 2 памяти отметок группируются отметки по принадлежности к одноименным сегментам радиолокационного пространства. После завершения приема и компоновки данных каждого полного сектора данные -го сектора обрабатываются блоком 3 формирования одиночных траекторий такими процедурами сопровождения одиночных целей, как привязка отметки к существующим траекториям, экстраполяция положения отметок, сглаживание траекторий, завязка новых траекторий и др. Блок 3 формирования одиночных траекторий в процедурах сопровождения использует с блока 10 памяти траекторий (-1)-го обзора данные о существующих траекториях предыдущего обзора. Предварительная компоновка данных в блоке 2 памяти отметок по сегментам позволяет блоку 3 формирования одиночных траекторий использовать в процедурах сопровождения одиночных целей данные только нескольких соседних сегментов (а не всего сектора или всего обзора), что значительно ускоряет выполнение процедур сопровождения. Результатом работы блока 3 формирования одиночных траекторий являются списки одиночных устойчивых и предварительных траекторий -го сектора с группировкой траекторий по сегментам. Блок 3 формирования одиночных траекторий сформированные списки одиночных траекторий записывает посегментно в блок 4 памяти траекторий -го обзора. Принятые в блок 4 памяти траекторий -го обзора одиночные устойчивые траектории-го сектора посегментно сканируют совместно с соседними сегментами -го и (-1)-го обзоров подвижным окном. При этом блок 7 основных процедур группирования траекторий на каждом -м шаге сканирования -го сектора загружает в блок 5 памяти центральной области подвижного окна одиночные устойчивые траектории -го сегмента (если он не пустой), считая -й сегмент центральной области подвижного окна. Кроме этого, блок 7 основных процедур группирования траекторий загружает в блок 8 памяти подвижного окна траектории, связанные с текущим положением подвижного окна одиночные и групповые -го обзора с блока 4 памяти траекторий -го обзора и групповые (устойчивые и предварительные) (-1)-го обзора с блока 10 памяти траекторий (-1)-го обзора. На этом подготовка данных на текущем шаге сканирования к выполнению процедур группирования завершена. Первой выполняется процедура включения в групповую траекторию. Для этого блок 7 основных процедур группирования траекторий выставляет с блока 5 памяти центральной области подвижного окна характеристики первой траектории на блок 6 корреляции траекторий (вектор движения и координаты траектории). На вторые входы блока 6 корреляции траекторий выставляются поочередно с блока 8 памяти подвижного окна (прокрутка) соответствующие характеристики всех групповых (устойчивых и предварительных) траекторий подвижного окна -го обзора. В процессе прокрутки траекторий блока 8 памяти подвижного окна результаты блока 6 корреляции траекторий анализируются блоком 7 основных процедур группирования траекторий по критерию сравнения с допустимой точностью векторов движения и координат траекторий (в пределах допустимого линейного размера группы). При положительном исходе текущая одиночная траектория блока 5 памяти центральной области подвижного окна включается блоком 7 основных процедур группирования траекторий в состав групповой траектории (в блок 4 памяти траекторий-го обзора и блок 8 памяти подвижного окна) без изменения статуса групповой траектории, одиночная траектория отмечается меткой корреляции ее с групповой траекторией. После прокрутки соответствующей группы траекторий блока 8 памяти подвижного окна 7 16975 1 2013.04.30 на входы блока 6 корреляции траекторий выставляются характеристики очередной траектории с блока 5 памяти центральной области подвижного окна и т.д. Второй выполняется процедура привязки к групповой траектории. Для этого аналогично первой процедуре характеристики каждой из одиночных траекторий (кроме отмеченных меткой корреляции) блока 5 памяти центральной области подвижного окна сравниваются с обобщенными характеристиками групповых устойчивых и предварительных траекторий (-1)-го обзора блока 8 памяти подвижного окна. В случае сравнения с заданной точностью векторов движения одиночной и групповой траекторий одиночную траекторию центральной области подвижного окна вместе с обобщенным вектором групповой траектории блок 7 основных процедур группирования траекторий вносит в блок 4 памяти траекторий -го обзора и в блок 8 памяти подвижного окна в качестве новой групповой устойчивой траектории -го обзора. Одиночная траектория блока 5 памяти центральной области подвижного окна отмечается меткой корреляции с групповой траекторией. В случае положительного исхода процедуры привязки запускается повторно процедура включения (в новую групповую траекторию). Третьей выполняется процедура завязки новых групповых траекторий. Каждую из одиночных траекторий (кроме отмеченных меткой корреляции) блока 5 памяти центральной области подвижного окна сравнивают с заданной точностью по вектору движения и координатам в блоке 6 корреляции траекторий поочередно со всеми одиночными траекториями -го обзора блока 8 памяти подвижного окна. Результаты блока 6 корреляции траекторий, а также наличие метки корреляции анализирует блок 7 основных процедур группирования траекторий. В случае сравнения векторов при отсутствии сравнения координат производят завязку новой групповой предварительной траектории следующим образом в блоке 6 корреляции траекторий определяют среднее значение векторов двух сравниваемых траекторий (получают обобщенный вектор движения) две исходные траектории и полученный обобщенный вектор движения блок 7 основных процедур группирования траекторий вносит в блок 4 памяти траекторий -го обзора и в блок 8 памяти подвижного окна в качестве новой групповой предварительной траектории. После завязки этой траектории блок 7 основных процедур группирования траекторий повторяет процедуру включения траекторий, в результате которой мощность новой групповой траектории может быть увеличена за счет включения одиночных траекторий блока 5 памяти центральной области подвижного окна. После повторения процедуры включения блок 7 основных процедур группирования траекторий продолжает прокрутку в определенной очередности траекторий блока 5 памяти центральной области подвижного окна и блока 8 памяти подвижного окна до завершения процедуры завязки новых групповых траекторий. Процедура завязки новых групповых траекторий заканчивается после просмотра всех траекторий блока 5 памяти центральной области подвижного окна и блока 8 памяти подвижного окна. После выполнения трех основных процедур группирования блок 7 основных процедур группирования траекторий выполняет очередной шаг сканирования путем перехода на последующий непустой сегмент в блоке 4 памяти траекторий -го обзора и т.д. до конца сектора в блоке 4 памяти траекторий -го обзора. В результате сканирования подвижным окном и выполнения процедур группирования в блоке 4 памяти траекторий -го обзора в дополнение к списку одиночных устойчивых траекторий сформированы списки групповых устойчивых и предварительных траекторий секторов -го обзора. После завершения основных процедур группирования по -му сектору блок 9 дополнительных процедур группирования траекторий выполняет по (-)-му сектору дополнительные процедуры группирования обобщение параметров групповых траекторий и контроль компактности групповых целей. Для выполнения дополнительных процедур блок 9 дополнительных процедур группирования траекторий в (-)-м секторе выбирает из блока 4 памяти траекторий -го обзора 8 16975 1 2013.04.30 последовательно все групповые (устойчивые и предварительные) траектории. По каждой из групповых траекторий блок 9 дополнительных процедур группирования траекторий определяет обобщенные параметры координаты центра цели, обобщенный вектор движения групповой цели, линейный размер группы, количество одиночных траекторий в группе и др. Кроме этого, каждую из групповых целей блок 9 дополнительных процедур группирования траекторий проверяет на компактность путем сравнения рассчитанного линейного размера группы с допустимым максимальным размером (это процедура контроля компактности групповой цели). При превышении расчетного размера над допустимым размером из состава групповой цели исключают одну или несколько наиболее удаленных одиночных траекторий, уменьшая группу до допустимых размеров. При этом полагаем, что исключаемые цели являются самостоятельными одиночными целями, летящими в пределах подвижного окна параллельно с групповой целью. После выполнения дополнительных процедур все обработанные траектории (-)-го сектора блок 9 дополнительных процедур группирования траекторий перезаписывает в блок 10 памяти траекторий (-1)-го обзора, в список траекторий (-1)-го обзора. Заявляемое устройство для сопровождения целей реализует в полном объеме заявляемый способ сопровождения целей. Источники информации 1. Фарина А. и др. Цифровая обработка радиолокационной информации. Сопровождение целей. - М. Радио и связь, 1993. - С. 26-27, 183-184 (прототип способа). 2.2032916 1, МПК 601 13/66, 1995 (прототип). Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
МПК: G01S 13/72
Метки: устройство, целей, сопровождения, реализации, способ
Код ссылки
<a href="https://by.patents.su/9-16975-sposob-soprovozhdeniya-celejj-i-ustrojjstvo-dlya-ego-realizacii.html" rel="bookmark" title="База патентов Беларуси">Способ сопровождения целей и устройство для его реализации</a>
Устройство радиолокационного сопровождения целей
Номер патента: 14711
Опубликовано: 30.08.2011
Авторы: Друзь Юрий Дмитриевич, Галуза Алексей Сергеевич, Короленко Владимир Анатольевич, Васковская Лидия Федоровна
МПК: G01S 13/66
Метки: устройство, радиолокационного, сопровождения, целей
Текст:
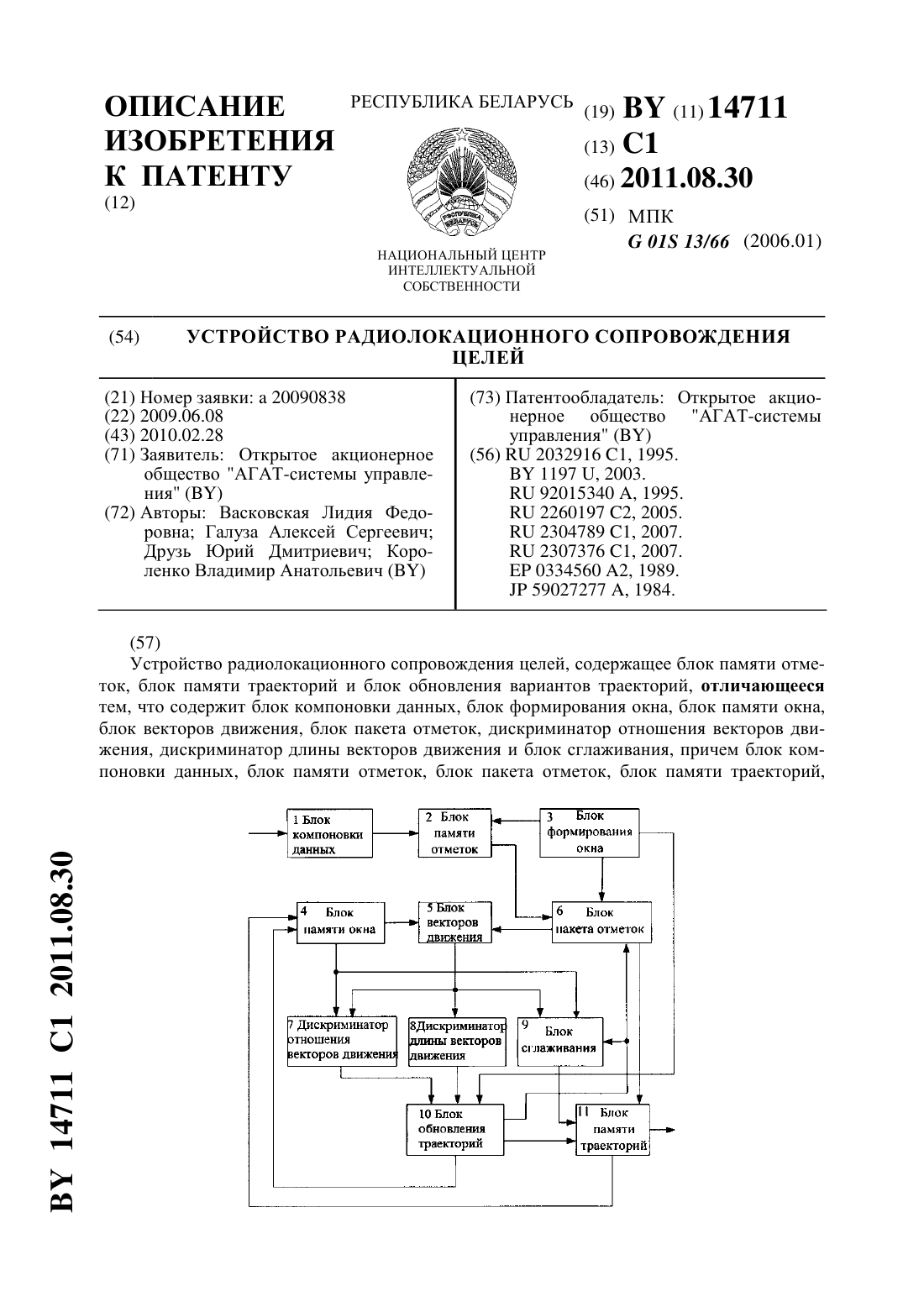
...на блок 5 векторов движения и мультиплексным выходом на блок 11 памяти траекторий. Дискриминатор 7 отношения векторов движения сравнивает с заданной точностью значения пакета входных векторов, результаты передает на вход блока 10 обновления траекторий. Дискриминатор 8 длины векторов движения определяет отношение длины расчетных векторов (пакета векторов от блока 5) с константой допустимого значения длины векторов. Выход дискриминатора 8...
Способ обнаружения диэлектрической мины и устройство для его реализации
Номер патента: 10792
Опубликовано: 30.06.2008
Авторы: Савенко Сергей Александрович, Гринкевич Антон Витальевич, Василин Николай Яковлевич
МПК: G01V 3/12
Метки: способ, реализации, мины, обнаружения, устройство, диэлектрической
Текст:
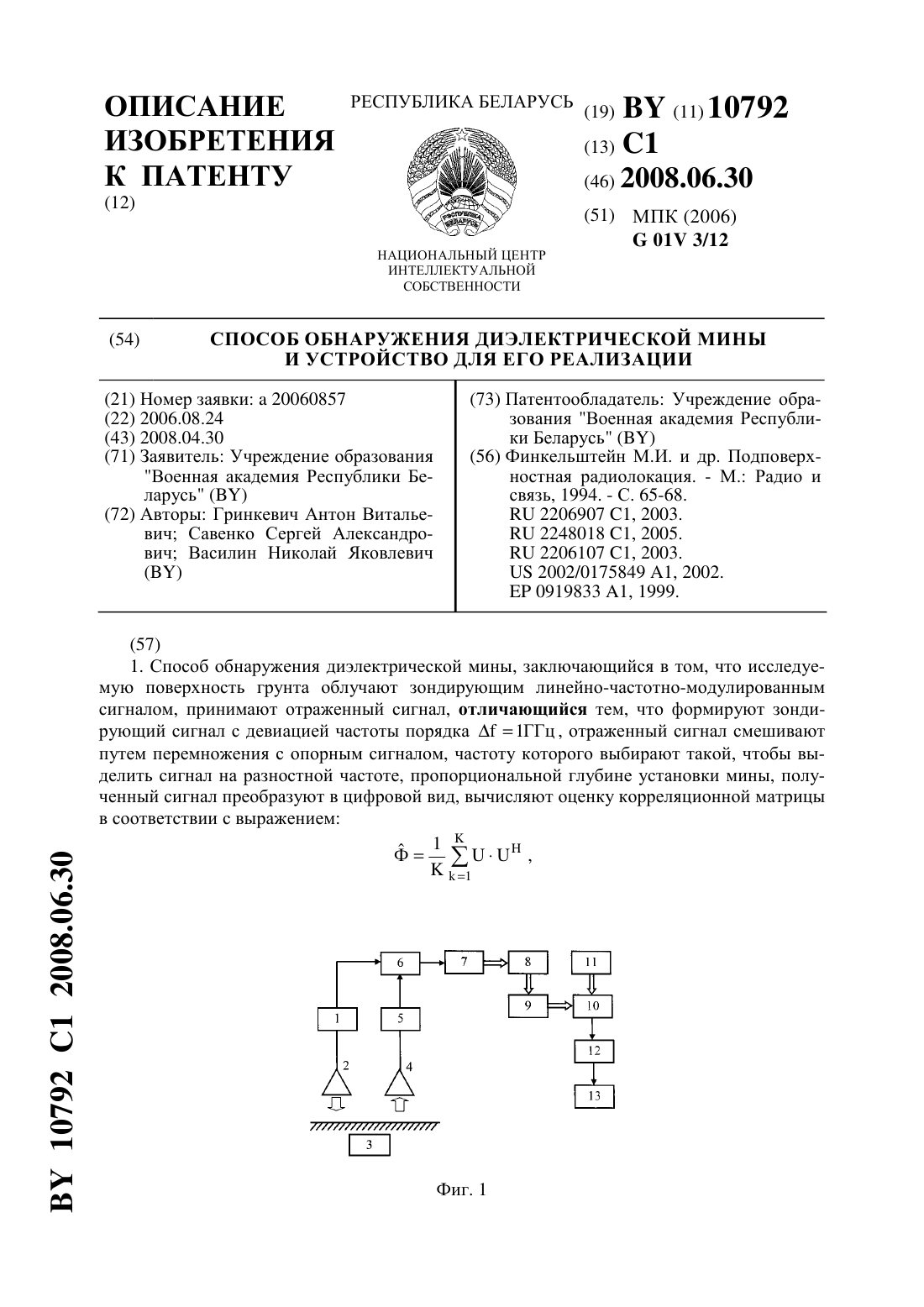
...правдоподобия, при помощи устройства, представленного на фиг. 1. Устройство работает следующим образом. Генератор 1 формирует линейно или дискретно частотно-модулированный сигнал с девиацией частоты порядка 1 ГГц, который излучается передающей антенной 2. Когда зондирующий сигнал достигает глубины залегания мины 3, происходит скачкообразное изменение диэлектрической проницаемости среды, что приводит к возникновению отраженного сигнала....
Способ трансформации электрической энергии и устройство для его реализации.

Номер патента: 8277
Опубликовано: 30.08.2006
Авторы: Холупов Андрей Григорьевич, Халевич Денис Викторович, Рыжкович Ромуальд Леонидович, Хохряков Андрей Геннадьевич, Марченко Антон Андреевич, Крайко Сергей Юрьевич, Рыжкович Леонид Ромуальдович, Ерашов Владимир Сергеевич, Стрельцов Дмитрий Вадимович, Чекан Сергей Александрович, Парфинович Сергей Александрович, Одинцов Денис Александрович, Войткевич Евгений Владимирович, Тиханович Денис Владимирович, Семенов Алексей Сергеевич, Сушко Дмитрий Андреевич, Гирель Артем Андреевич
МПК: H01F 3/10, H01F 27/24
Метки: электрической, способ, реализации, устройство, трансформации, энергии
Текст:
...замкнутый, выполненный в виде многовитковой спирали ферромагнитный сердечник в заявляемом устройстве содержит не менее двух витков. Это не менее чем в два раза увеличивает сцепленный с витками вторичной обмотки магнитный поток и, следовательно, не менее чем в два раза уменьшает необходимое количество витков во вторичной обмотке. При объединении витков спирали в компактную группу или, лучше сказать, групповой стержень, на котором...
Способ ультразвуковой дефектоскопии колесных пар рельсового транспорта и устройство для его реализации
Номер патента: 10063
Опубликовано: 30.12.2007
Автор: Дубина Анатолий Владимирович
МПК: G01N 29/26, G01M 17/08
Метки: способ, устройство, колесных, транспорта, дефектоскопии, реализации, пар, рельсового, ультразвуковой
Текст:
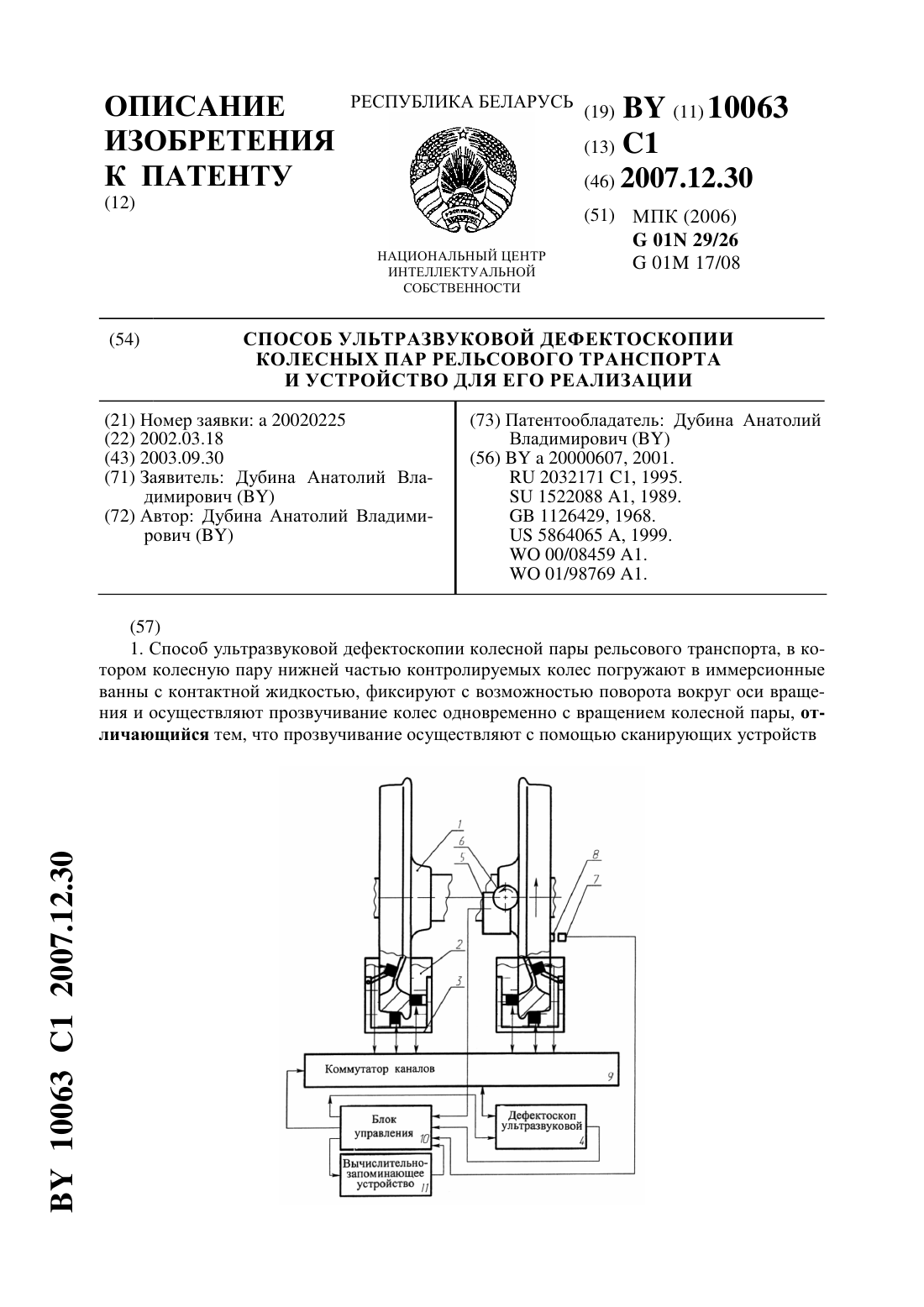
...пару вращают в заданном направлении К оборотов относительно неподвижного сканирующего устройства, одновременно регистрируют угловую координату съемной метки по отношению к сканирующему устройству,запоминают угловые координаты и амплитуды принимаемых сигналов, и по превышению браковочного уровня принимаемого сигнала судят о наличии недопустимых дефектов. Для подтверждения достоверности амплитуды принятых сигналов, различающиеся по...
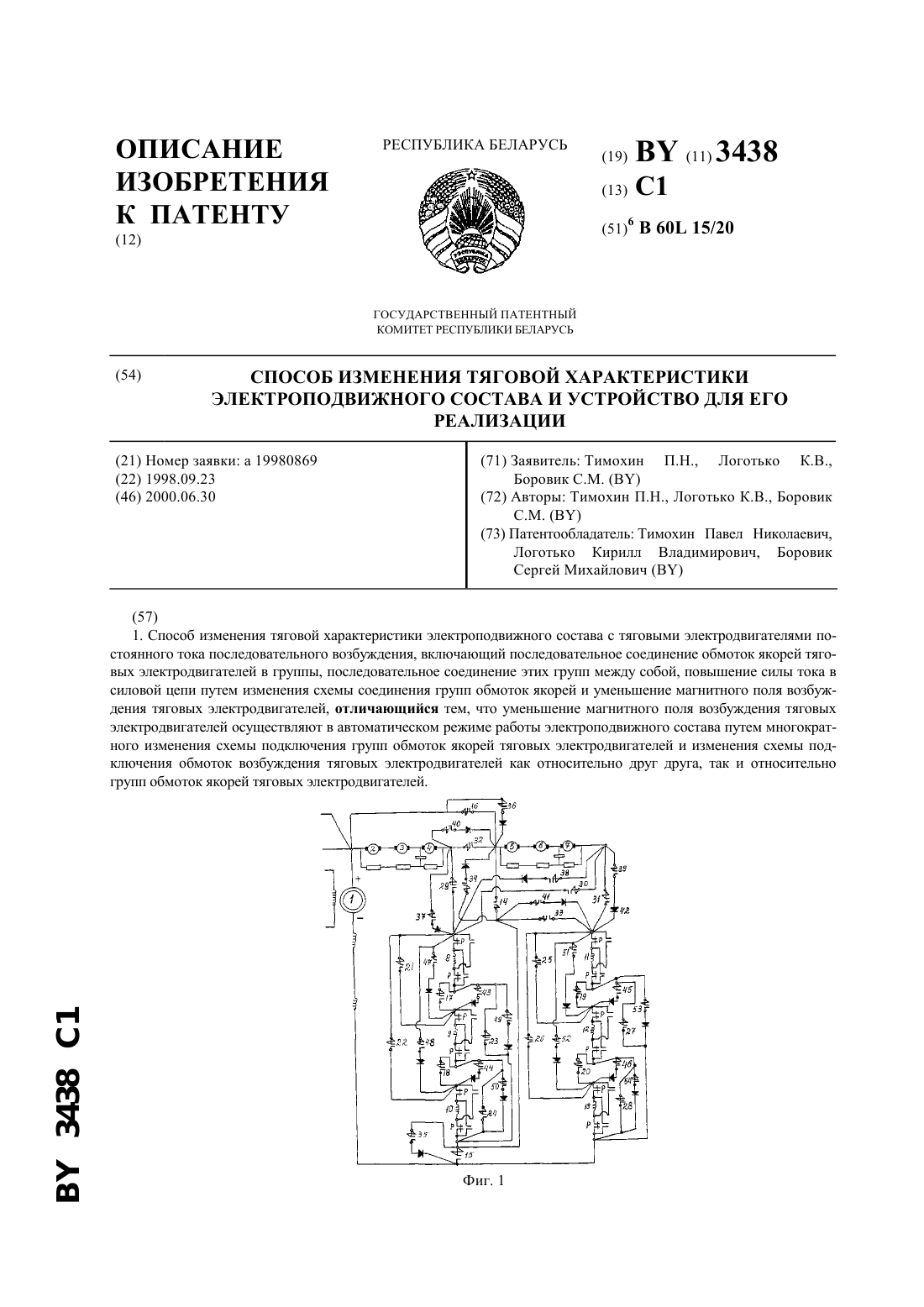
Способ изменения тяговой характеристики электроподвижного состава и устройство для его реализации
Номер патента: 3438
Опубликовано: 30.06.2000
Авторы: Логотько Кирилл Владимирович, Боровик Сергей Михайлович, Тимохин Павел Николаевич
МПК: B60L 15/20
Метки: способ, устройство, электроподвижного, реализации, тяговой, изменения, состава, характеристики
Текст:
...между собой тяговых электродвигателей, на параллельное их соединение, где диод зашунтирован с одним из отключающихся контакторов 2. Недостатком данного устройства является то, что в момент перехода с последовательного соединения тяговых электродвигателей на параллельное требуется увеличение подводимой мощности, а в то же время данное устройство имеет малый диапазон регулирования скорости. Наиболее близким по технологической...
Предыдущий патент: Способ определения тиабендазола, имазалила и тебуконазола в одной пробе воздуха рабочей зоны или атмосферного воздуха
Следующий патент: Вертикальный элеватор для кусковых грузов
Случайный патент: Сумматор унитарных кодов по модулю семь