Устройство радиолокационного сопровождения целей
Номер патента: 14711
Опубликовано: 30.08.2011
Авторы: Галуза Алексей Сергеевич, Друзь Юрий Дмитриевич, Короленко Владимир Анатольевич, Васковская Лидия Федоровна

Текст
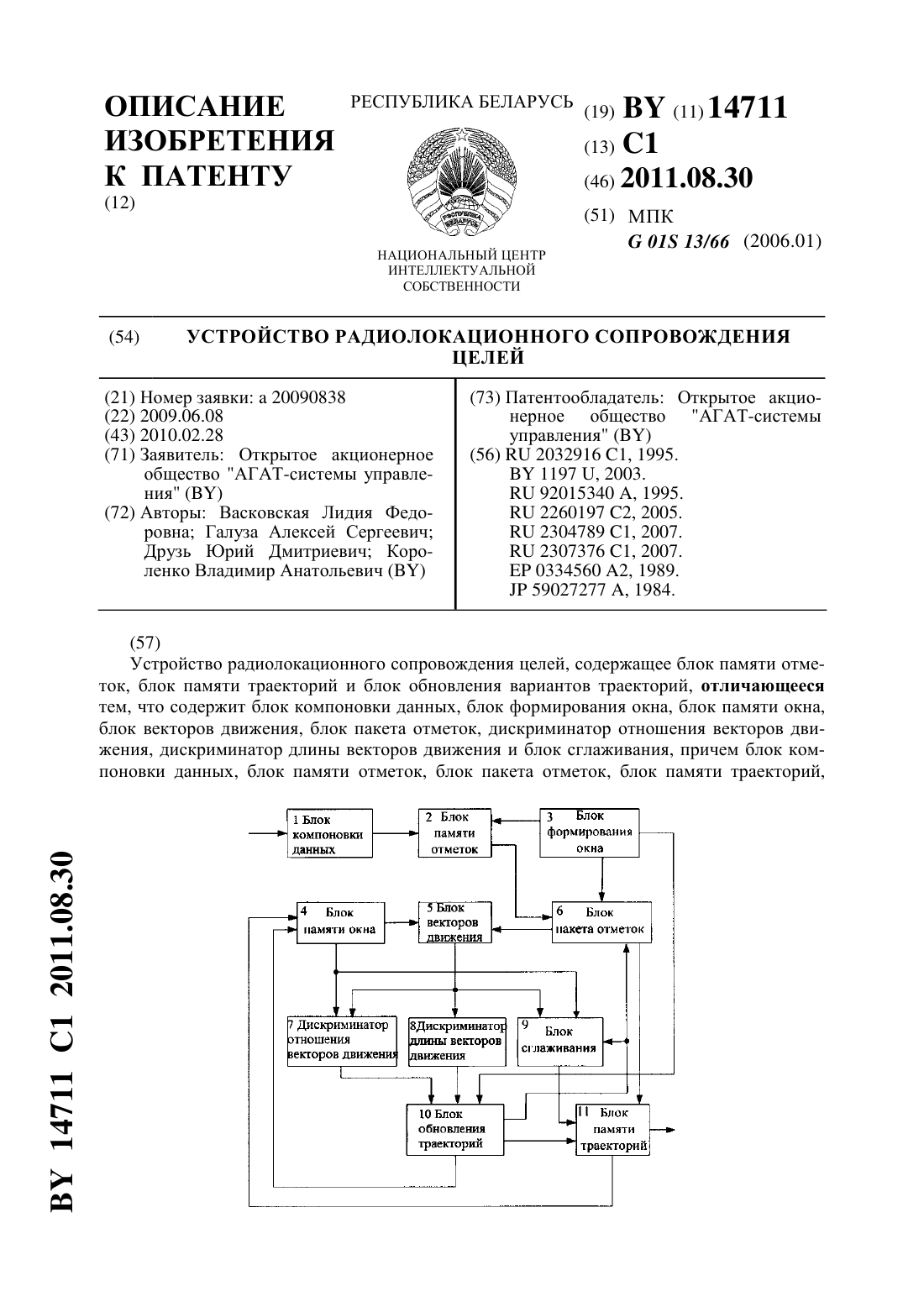
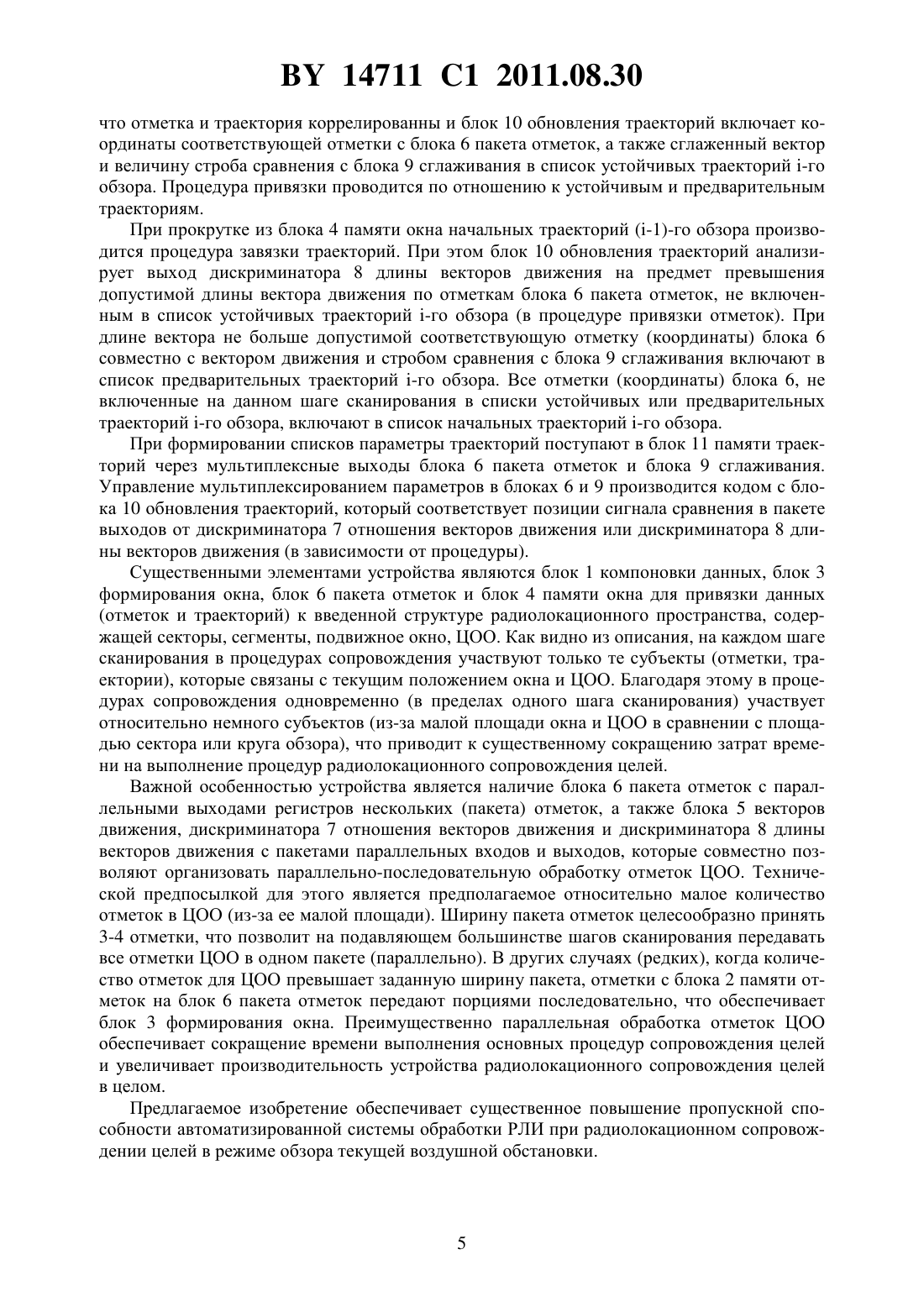
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ(71) Заявитель Открытое акционерное общество АГАТ-системы управления(72) Авторы Васковская Лидия Федоровна Галуза Алексей Сергеевич Друзь Юрий Дмитриевич Короленко Владимир Анатольевич(73) Патентообладатель Открытое акционерное общество АГАТ-системы управления(57) Устройство радиолокационного сопровождения целей, содержащее блок памяти отметок, блок памяти траекторий и блок обновления вариантов траекторий, отличающееся тем, что содержит блок компоновки данных, блок формирования окна, блок памяти окна,блок векторов движения, блок пакета отметок, дискриминатор отношения векторов движения, дискриминатор длины векторов движения и блок сглаживания, причем блок компоновки данных, блок памяти отметок, блок пакета отметок, блок памяти траекторий,14711 1 2011.08.30 блок памяти окна и блок векторов движения последовательно соединены шиной данных выход блока пакета отметок соединен шинами данных с соответствующими входами блока векторов движения, выход которого параллельно соединен шинами данных с соответствующими входами дискриминатора отношения векторов движения, дискриминатора длины векторов движения и блока сглаживания первый выход блока формирования окна соединен адресной шиной со входом блока памяти отметок, а второй и третий выходы соответственно соединены шинами данных со входами блока пакета отметок и блока обновления вариантов траекторий выход блока памяти окна параллельно соединен шиной данных с соответствующими входами дискриминатора отношения векторов движения и блока сглаживания, выход которого соединен с первым входом блока памяти траекторий выходы дискриминатора отношения векторов движения и дискриминатора длины векторов движения соединены с соответствующими входами блока обновления вариантов траекторий, первый выход которого параллельно соединен с соответствующими входами блока сглаживания и блока пакета отметок, второй выход - с соответствующим входом блока памяти окна, а третий выход - со вторым входом блока памяти траекторий. Устройство относится к радиолокации и может быть использовано в автоматизированных системах обработки радиолокационной информации (РЛИ) обзорных радиолокационных станций. Прототипом предлагаемого изобретения является устройство радиолокационного автозахвата и автосопровождения движущихся воздушных объектов, содержащее запоминающее устройство отметок от целей (блок памяти отметок), запоминающее устройство вариантов траекторий (блок памяти траекторий), блок обновления вариантов траекторий(блок обновления траекторий). Недостатком прототипа является невысокая пропускная способность, обусловленная сложным многооперационным процессом обработки данных при радиолокационном сопровождении целей. Технической задачей предлагаемого изобретения является повышение пропускной способности автоматизированной системы обработки РЛИ при радиолокационном сопровождении целей в режиме обзора текущей воздушной обстановки. Поставленная задача решена со следующими техническими результатами существенно сокращено количество субъектов (отметок, траекторий), подлежащих одновременной обработке в процедурах сопровождения целей реализована преимущественно параллельная пакетная обработка отметок в процедурах сопровождения целей. Для достижения указанных технических результатов в устройство, содержащее блок памяти отметок, блок памяти траекторий, блок обновления траекторий введены блок компоновки данных, блок формирования окна, блок памяти окна, блок векторов движения,блок пакета отметок, дискриминатор отношения векторов движения, дискриминатор длины векторов движения и блок сглаживания, причем блок компоновки данных, блок памяти отметок, блок пакета отметок, блок памяти траекторий, блок памяти окна и блок векторов движения последовательно соединены шиной данных выход блока пакета отметок соединен шинами данных с соответствующими входами блока векторов движения,выход которого параллельно соединен шинами данных с соответствующими входами дискриминатора отношения векторов движения, дискриминатора длины векторов движения и блока сглаживания первый выход блока формирования окна соединен адресной шиной со входом блока памяти отметок, а второй и третий выходы соответственно соединены шинами данных со входами блока пакета отметок и блока обновления траекторий выход блока памяти окна параллельно соединен шиной данных с соответствующими входами дискриминатора отношения векторов движения и блока сглаживания, выход которого соединен с первым входом блока памяти траекторий выходы дискриминатора отношения 2 14711 1 2011.08.30 векторов движения и дискриминатора длины векторов движения соединены с соответствующими входами блока обновления траекторий, первый выход которого параллельно соединен с соответствующими входами блока пакета отметок и блока сглаживания, второй выход - с соответствующим входом блока памяти окна, а третий выход - со вторым входом блока памяти траекторий. Предлагаемое изобретение представлено на чертеже в виде структурной схемы. Предлагаемое устройство для своей работы предполагает условное разбиение всего радиолокационного пространства, доступного РЛС, на ячейки. При этом пространство по углу разбивают на азимутальные сектора, которые, в свою очередь, разбивают по дальности на сегменты. Таким образом создана секторно-сегментная структура пространства РЛС. Положение элементов структуры фиксированное. Для проведения основных процедур в структуру пространства вводится подвижное окно, которое объединяет группу соседних сегментов (например, девять сегментов в трех соседних секторах) с центральной областью окна (ЦОО) малой площади. Устройство радиолокационного сопровождения целей содержит блок 1 компоновки данных, блок 2 памяти отметок, блок 3 формирования окна, блок 4 памяти окна, блок 5 векторов движения, блок 6 пакета отметок, дискриминатор 7 отношения векторов движения, дискриминатор 8 длины векторов движения, блок 9 сглаживания, блок 10 обновления траекторий, блок 11 памяти траекторий. Блок 1 компоновки данных служит для приема входных данных, группировки данных по принадлежности к одноименным сегментам структуры пространства, преобразования координат отметок в декартову систему (при необходимости) и хранения данных до конца текущего сектора. Выход блока 1 соединен шиной данных с входом блока 2 памяти отметок. Блок 2 памяти отметок служит для хранения данных об отметках текущего обзора,сгруппированных по секторам и сегментам. Выход блока 2 соединен шиной данных с входом блока 6 пакета отметок. Блок 3 формирования окна служит для загрузки исходной информации в блок 6 пакета отметок и в блок 4 памяти окна. Блок 3 соединен адресной шиной с входом блока 2 памяти отметок и раздельными группами выходов с входами блока 6 пакета отметок и блока 10 обновления траекторий. Блок 4 памяти окна служит для хранения траекторий (-1)-го обзора, связанных с сегментами текущего положения окна. Первый выход блока 4 соединен параллельно с входами дискриминатора 7 отношения векторов движенияи блока 9 сглаживания, второй выход блока 4 соединен шиной данных с входом блока 5 векторов движения. Блок 5 векторов движения служит для параллельного вычисления векторов движения в нескольких (трех-четырех) парах координат, поступающих на его входы от блока 4 памяти окна и блока 6 пакета отметок. Вектор движения характеризуется длиной вектора(перемещение за один обзор) и направлением перемещения. Выход блока 5 параллельно соединен шинами данных с соответствующими входами дискриминатора 7 отношения векторов движения, дискриминатора 8 длины векторов движения и блока 9 сглаживания. Блок 6 пакета отметок служит для хранения пакета отметок ЦОО на время их сравнения со всеми траекториями блока 4 памяти окна. Блок 6 содержит набор регистров с параллельными выходами на блок 5 векторов движения и мультиплексным выходом на блок 11 памяти траекторий. Дискриминатор 7 отношения векторов движения сравнивает с заданной точностью значения пакета входных векторов, результаты передает на вход блока 10 обновления траекторий. Дискриминатор 8 длины векторов движения определяет отношение длины расчетных векторов (пакета векторов от блока 5) с константой допустимого значения длины векторов. Выход дискриминатора 8 соединен с входом блока 10 обновления траекторий. 3 14711 1 2011.08.30 Блок 9 сглаживания служит для сглаживания пакета расчетных векторов от блока 5 векторов движения с учетом предшествующего вектора траектории от блока 4 памяти окна (например, путем усреднения), а также для определения величины строба сравнения. Выход блока 9 соединен с входом блока 11 памяти траекторий. Блок 10 обновления траекторий служит для организации процедур сопровождения целей (завязка траекторий, привязка отметок к существующим траекториям), а также для формирования результирующих списков траекторий с записью их в блок 11 памяти траекторий. При этом учитываются результаты дискриминаторов 7 и 8. Первый выход блока 10 параллельно соединен с соответствующими входами блока 6 пакета отметок и блока 9 сглаживания, второй выход - с соответствующим входом блока 4 памяти окна, а третий выход - со вторым входом блока 11 памяти траекторий. Блок 11 памяти траекторий служит для хранения всех траекторий (устойчивых, предварительных и начальных) 1-го и (-1)-го обзоров. Выход блока 11 соединен шиной данных с входом блока 4 памяти окна. Устройство радиолокационного сопровождения целей работает следующим образом. Каждый обзор текущей воздушной обстановки характеризуется обновляемыми списками устойчивых траекторий, предварительных траекторий и начальных траекторий. Формирование списков осуществляется при выполнении устройством следующих известных основных процедур сопровождения целей привязка отметок к существующим траекториям, в которой проверяется корреляция поступающих отметок по определенным критериям с образованными в предыдущих обзорах траекториями завязка новых траекторий для поступающих отметок, не коррелированных с существующими траекториями сглаживание параметров траекторий текущего обзора с учетом характеристик траекторий предыдущих обзоров. Входные данные поступают в блок 1 компоновки данных, где координаты отметок преобразуются в адрес сегмента радиолокационного пространства, группируются по принадлежности к одноименным сегментам, преобразуются в заданную систему координат(например, в декартовую) и накапливаются в памяти блока 1 до конца текущего азимутального сектора. В начале очередного азимутального сектора данные переписываются в блок 2 памяти отметок с группированием их по секторам и сегментам. Для ускорения поиска данных (в дальнейшем) и сокращения объема блока 2 данные могут быть организованы в виде списков. После перезаписи в блок 2 памяти отметок данных каждого очередного сектора блок 3 формирования окна производит шаговое сканирование подвижным окном последнего сектора -го (текущего) обзора совместно с траекториями соседних секторов (-1)-го (предыдущего) обзора. На каждом шаге сканирования блок 3 загружает данные об отметках ЦОО из блока 2 памяти отметок в блок 6 пакета отметок и совместно с блоком 10 обновления траекторий данные о траекториях подвижного окна (-1)-го обзора из блока 11 памяти траекторий в блок 4 памяти окна. При проведении всех процедур сопровождения целей блок 6 пакета отметок выставляет на требуемое время координаты пакета отметок на первые входы блока 5 векторов движения, на второй вход которого (общего для всех векторов) выставляются последовательно координаты траекторий из блока 4 памяти окна. На каждом шаге сканирования блок 10 обновления траекторий выполняет упомянутые выше основные процедуры сопровождения целей. При этом блок 10 последовательно читает траектории из блока 4 памяти окна (прокрутка), проверяет выполнение критериев корреляции отметок и траекторий по выходам дискриминатора 7 отношения векторов движения и дискриминатора 8 длины векторов движения. В процедуре привязки отметок к траекториям критерием корреляции отметки и траектории является наличие сигнала с дискриминатора 7 о равенстве с заданной точностью векторов текущего с блока 5 векторов движения и предыдущего с блока 4 памяти окна. При наличии этого сигнала считаем,4 14711 1 2011.08.30 что отметка и траектория коррелированны и блок 10 обновления траекторий включает координаты соответствующей отметки с блока 6 пакета отметок, а также сглаженный вектор и величину строба сравнения с блока 9 сглаживания в список устойчивых траекторий -го обзора. Процедура привязки проводится по отношению к устойчивым и предварительным траекториям. При прокрутке из блока 4 памяти окна начальных траекторий (-1)-го обзора производится процедура завязки траекторий. При этом блок 10 обновления траекторий анализирует выход дискриминатора 8 длины векторов движения на предмет превышения допустимой длины вектора движения по отметкам блока 6 пакета отметок, не включенным в список устойчивых траекторий -го обзора (в процедуре привязки отметок). При длине вектора не больше допустимой соответствующую отметку (координаты) блока 6 совместно с вектором движения и стробом сравнения с блока 9 сглаживания включают в список предварительных траекторий -го обзора. Все отметки (координаты) блока 6, не включенные на данном шаге сканирования в списки устойчивых или предварительных траекторий -го обзора, включают в список начальных траекторий -го обзора. При формировании списков параметры траекторий поступают в блок 11 памяти траекторий через мультиплексные выходы блока 6 пакета отметок и блока 9 сглаживания. Управление мультиплексированием параметров в блоках 6 и 9 производится кодом с блока 10 обновления траекторий, который соответствует позиции сигнала сравнения в пакете выходов от дискриминатора 7 отношения векторов движения или дискриминатора 8 длины векторов движения (в зависимости от процедуры). Существенными элементами устройства являются блок 1 компоновки данных, блок 3 формирования окна, блок 6 пакета отметок и блок 4 памяти окна для привязки данных(отметок и траекторий) к введенной структуре радиолокационного пространства, содержащей секторы, сегменты, подвижное окно, ЦОО. Как видно из описания, на каждом шаге сканирования в процедурах сопровождения участвуют только те субъекты (отметки, траектории), которые связаны с текущим положением окна и ЦОО. Благодаря этому в процедурах сопровождения одновременно (в пределах одного шага сканирования) участвует относительно немного субъектов (из-за малой площади окна и ЦОО в сравнении с площадью сектора или круга обзора), что приводит к существенному сокращению затрат времени на выполнение процедур радиолокационного сопровождения целей. Важной особенностью устройства является наличие блока 6 пакета отметок с параллельными выходами регистров нескольких (пакета) отметок, а также блока 5 векторов движения, дискриминатора 7 отношения векторов движения и дискриминатора 8 длины векторов движения с пакетами параллельных входов и выходов, которые совместно позволяют организовать параллельно-последовательную обработку отметок ЦОО. Технической предпосылкой для этого является предполагаемое относительно малое количество отметок в ЦОО (из-за ее малой площади). Ширину пакета отметок целесообразно принять 3-4 отметки, что позволит на подавляющем большинстве шагов сканирования передавать все отметки ЦОО в одном пакете (параллельно). В других случаях (редких), когда количество отметок для ЦОО превышает заданную ширину пакета, отметки с блока 2 памяти отметок на блок 6 пакета отметок передают порциями последовательно, что обеспечивает блок 3 формирования окна. Преимущественно параллельная обработка отметок ЦОО обеспечивает сокращение времени выполнения основных процедур сопровождения целей и увеличивает производительность устройства радиолокационного сопровождения целей в целом. Предлагаемое изобретение обеспечивает существенное повышение пропускной способности автоматизированной системы обработки РЛИ при радиолокационном сопровождении целей в режиме обзора текущей воздушной обстановки. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: G01S 13/66
Метки: целей, устройство, радиолокационного, сопровождения
Код ссылки
<a href="https://by.patents.su/6-14711-ustrojjstvo-radiolokacionnogo-soprovozhdeniya-celejj.html" rel="bookmark" title="База патентов Беларуси">Устройство радиолокационного сопровождения целей</a>
Способ адаптивного обнаружения радиолокационного сигнала
Номер патента: 13893
Опубликовано: 30.12.2010
Авторы: Гуцев Роман Александрович, Седышев Сергей Юрьевич, Калютчик Виталий Степанович
МПК: G01S 13/00
Метки: радиолокационного, адаптивного, обнаружения, сигнала, способ
Текст:
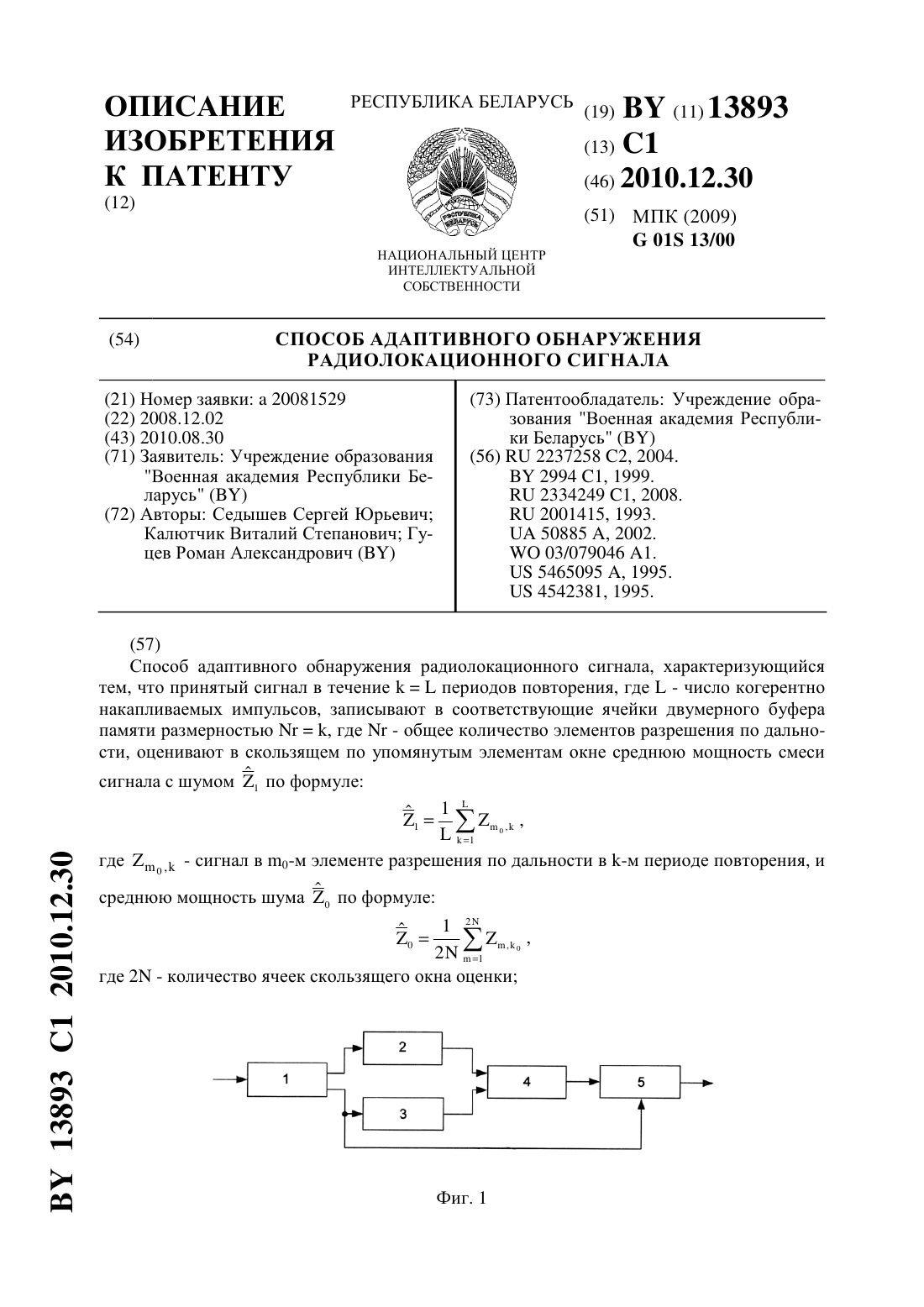
...памяти. Оптимальный по критерию минимума среднего риска порог обнаружения получим из выражения для среднего риска 3(2)00( 0 )10 ( 0 )01(1 )11(1 ) ,где (0), (1) - априорные вероятности отсутствия и наличия цели- стоимость реше нияпри условии (,0,1)1(1 1 ) - условная вероятность правильного об наружения 1(10 ) - условная вероятность ложной тревоги- условная вероятность пропуска цели- условная вероятность правильного необнаружения(0,1) -...
Устройство управления буферной памятью
Номер патента: 1191
Опубликовано: 14.06.1996
Авторы: Фельдман Владимир Марткович, Пентковский Владимир Мстиславович, Коваленко Сергей Саввич, Зайцев Александр Иванович
МПК: G06F 12/08
Метки: памятью, буферной, устройство, управления
Текст:
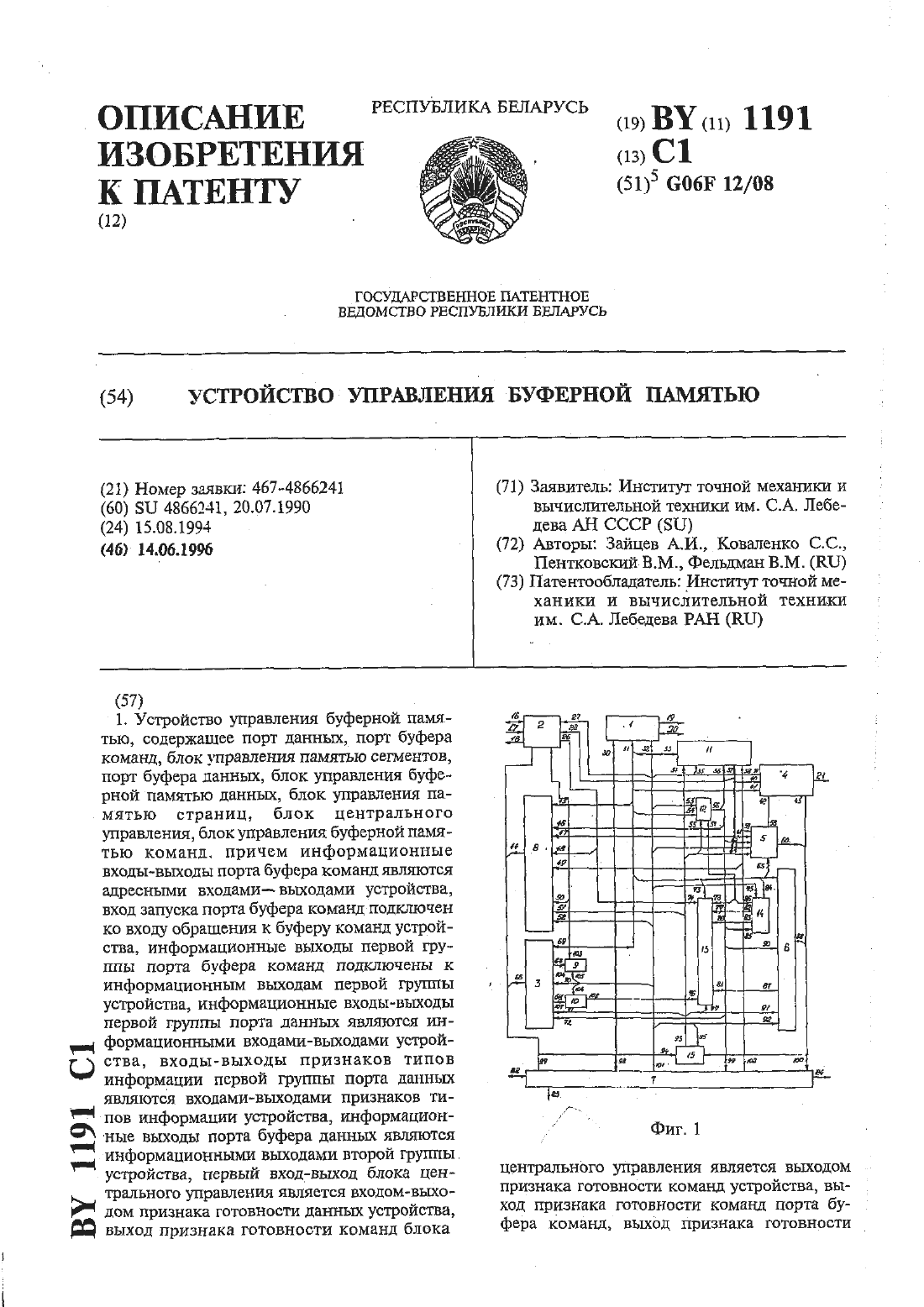
...второго мультиплексора адреса подключены к адресным входам второй группы соответственно первого, второго, третьего и четвертого узлов памяти адресных признаков и адресному входу второго мультиплексора данных, выход формирователя признаков значимости подключен к адресным входам третьейгруппы первого, второго, третьего и четвертого узлов памяти адресных признаков, выход мультигшексора данных признаков старения соединен с информационным входом...
Устройство отображения радиолокационной информации
Номер патента: 12395
Опубликовано: 30.10.2009
Авторы: Ленцкевич Изабелла Борисовна, Гурьев Николай Николаевич, Соколов Олег Андреевич, Галуза Алексей Сергеевич
МПК: G01S 7/04
Метки: информации, устройство, отображения, радиолокационной
Текст:
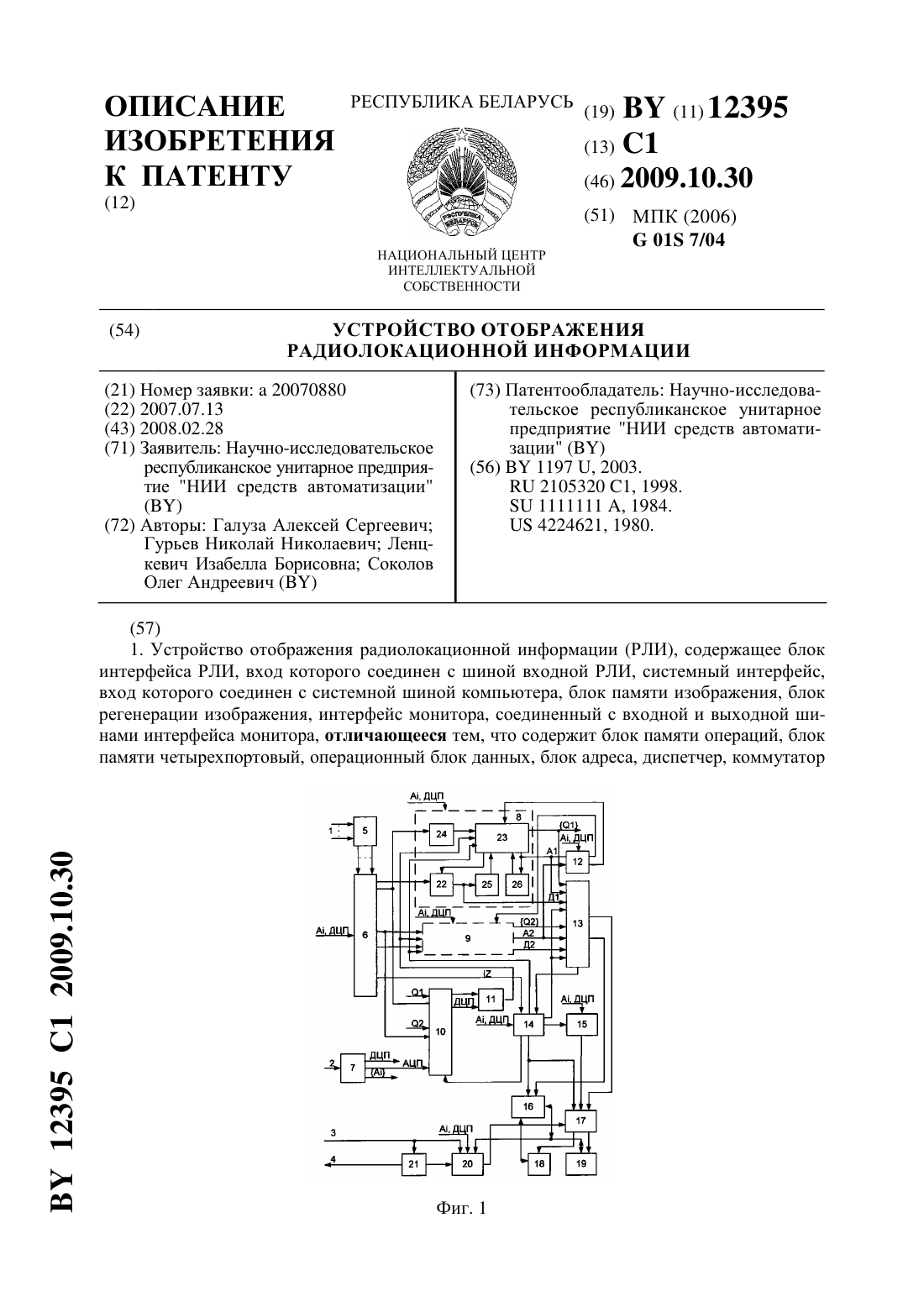
...развертка в координатах азимут - дальность, прямоугольная развертка в координатах высота - дальность и прямоугольная развертка в координатах угол места - дальность. Тип развертки задает компьютер в блоки 8, 9 обработки РЛИ. Блок 11 памяти констант предназначен для хранения постоянных величин (например, ,), необходимых для преобразования систем координат в соответствии с типом развертки. Содержимое блока 11 памяти констант загружается с...
Аэроионизатор
Номер патента: 7300
Опубликовано: 30.09.2005
Авторы: Супрунюк Александр Степанович, Бондарик Василий Михайлович, Клим Сергей Дмитриевич, Кашицкий Эдуард Степанович, Достанко Анатолий Павлович, Кракасевич Сергей Викторович, Осипов Анатолий Николаевич
Метки: аэроионизатор
Текст:
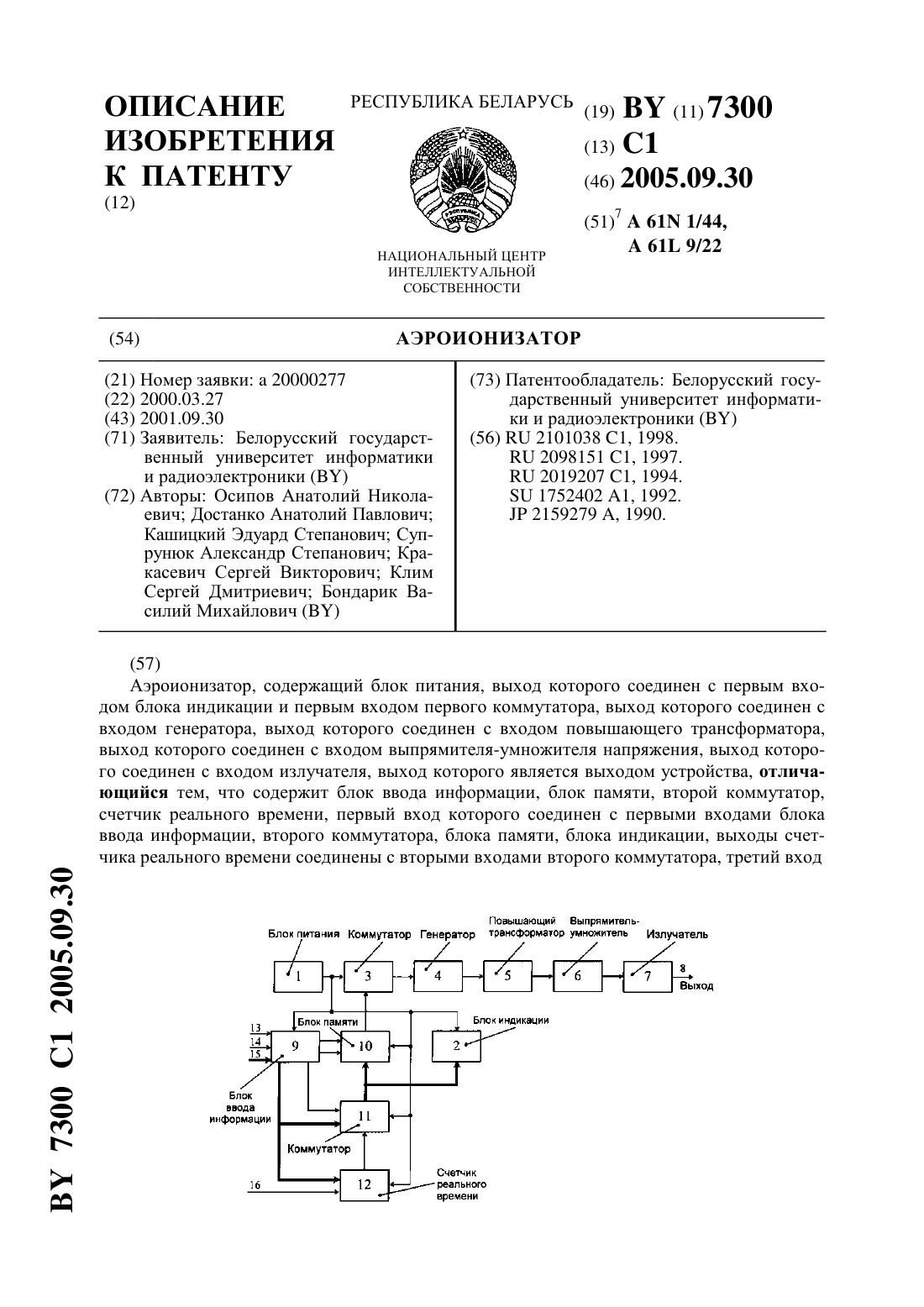
...в том, что в блок памяти вводится информация о времени включения/выключения устройства, которое сравнивается с данными счетчика реального времени, что позволяет определить реальное время включения/выключения ионизатора. На фигуре приведена структурная схема устройства. Устройство содержит блок питания 1, выход которого соединен с первым входом блока индикации 2 и первым входом первого коммутатора 3, выход которого соединен с входом...
Устройство для вычисления фундаментальных аддитивно симметрических булевых функций
Номер патента: 13241
Опубликовано: 30.06.2010
Автор: Авгуль Леонид Болеславович
МПК: G06F 7/00
Метки: аддитивно, симметрических, устройство, вычисления, функций, булевых, фундаментальных
Текст:
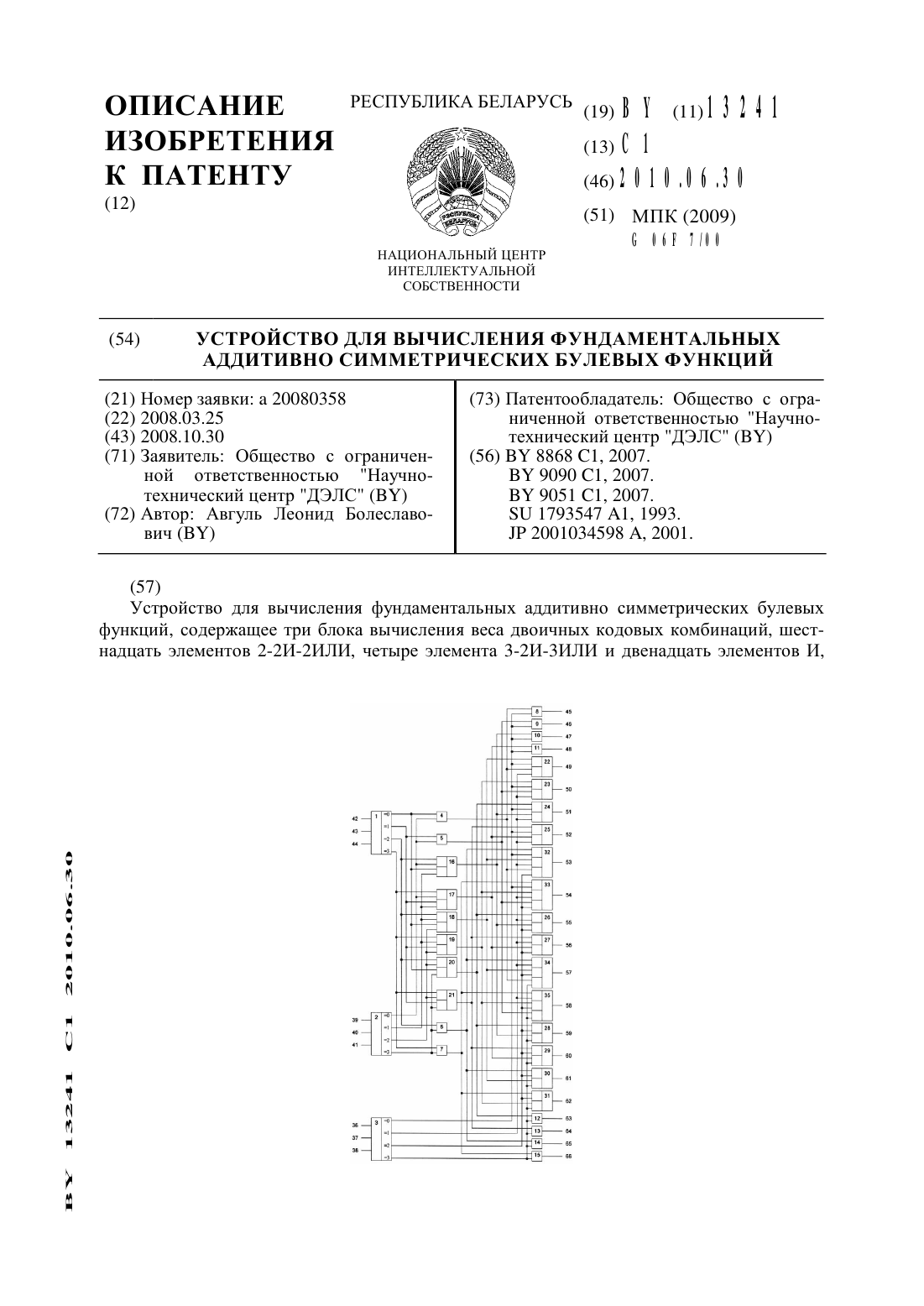
...или монотонные (пороговые) симметрические булевы функции п переменных.Недостатком модуля является невозможность вычисления фундаментальных аддитивно симметрических булевых функций.Наиболее близким по конструкции и функциональным возможностям техническим рещением к предлагаемому является устройство для сложения, содержащее три элемента сложения по модулю два, семнадцать элементов И, три элемента ИЛИ-НЕ, восемь элементов 2-2 И-2 ИЛИ,...
Предыдущий патент: Способ остеотомии бедренной кости
Следующий патент: Классификатор
Случайный патент: Ковшовый элеватор