Манипулятор
Текст
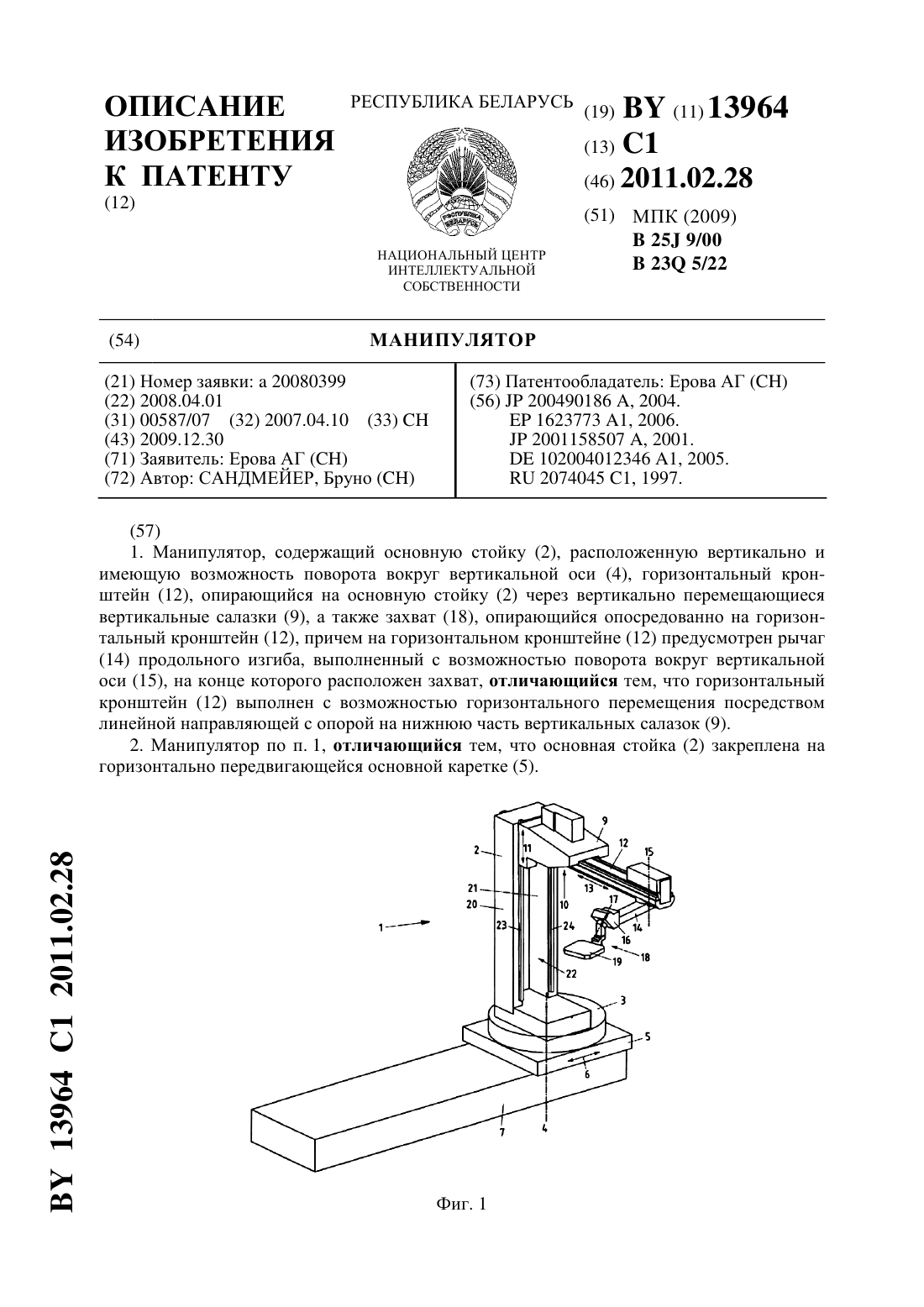
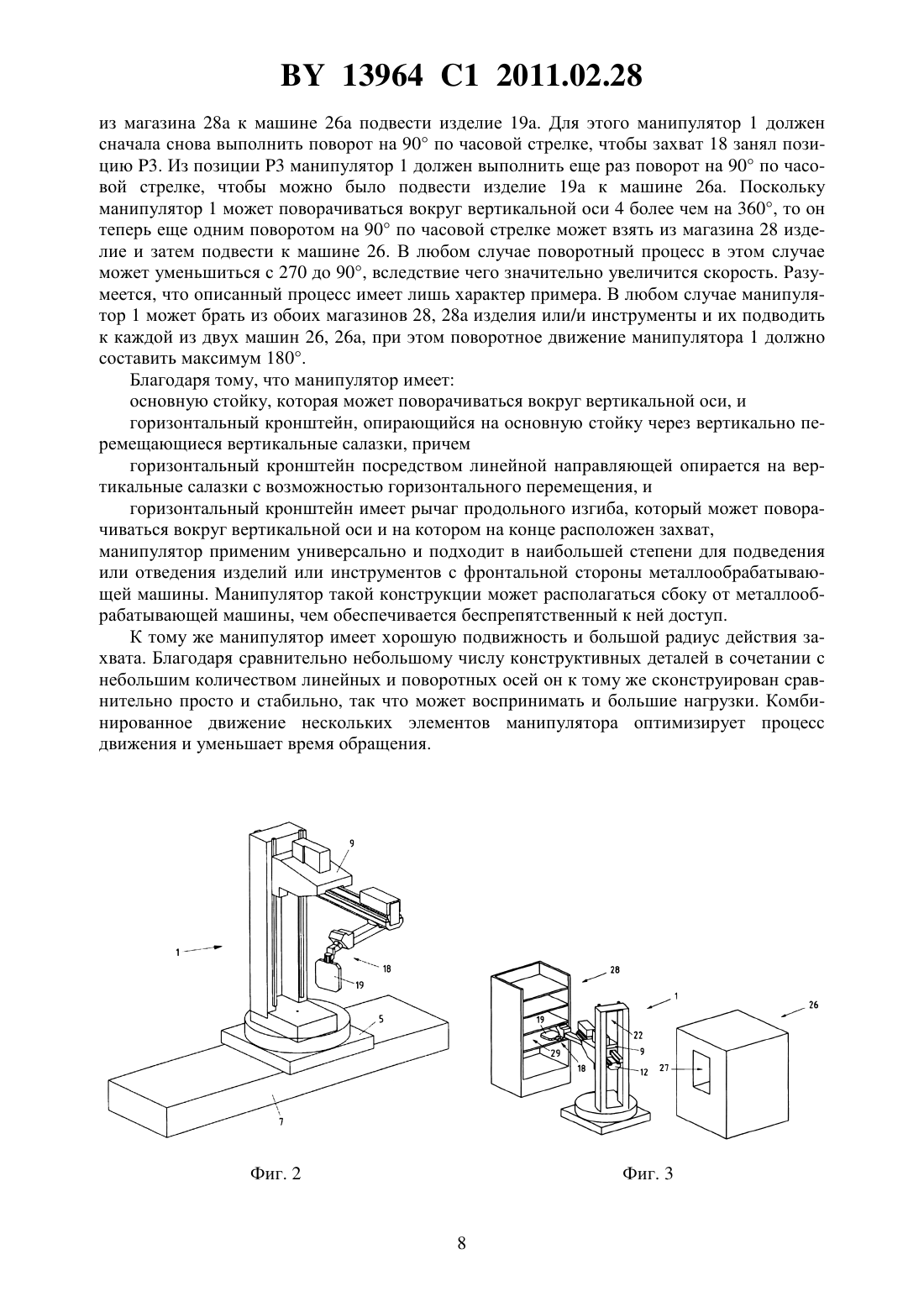
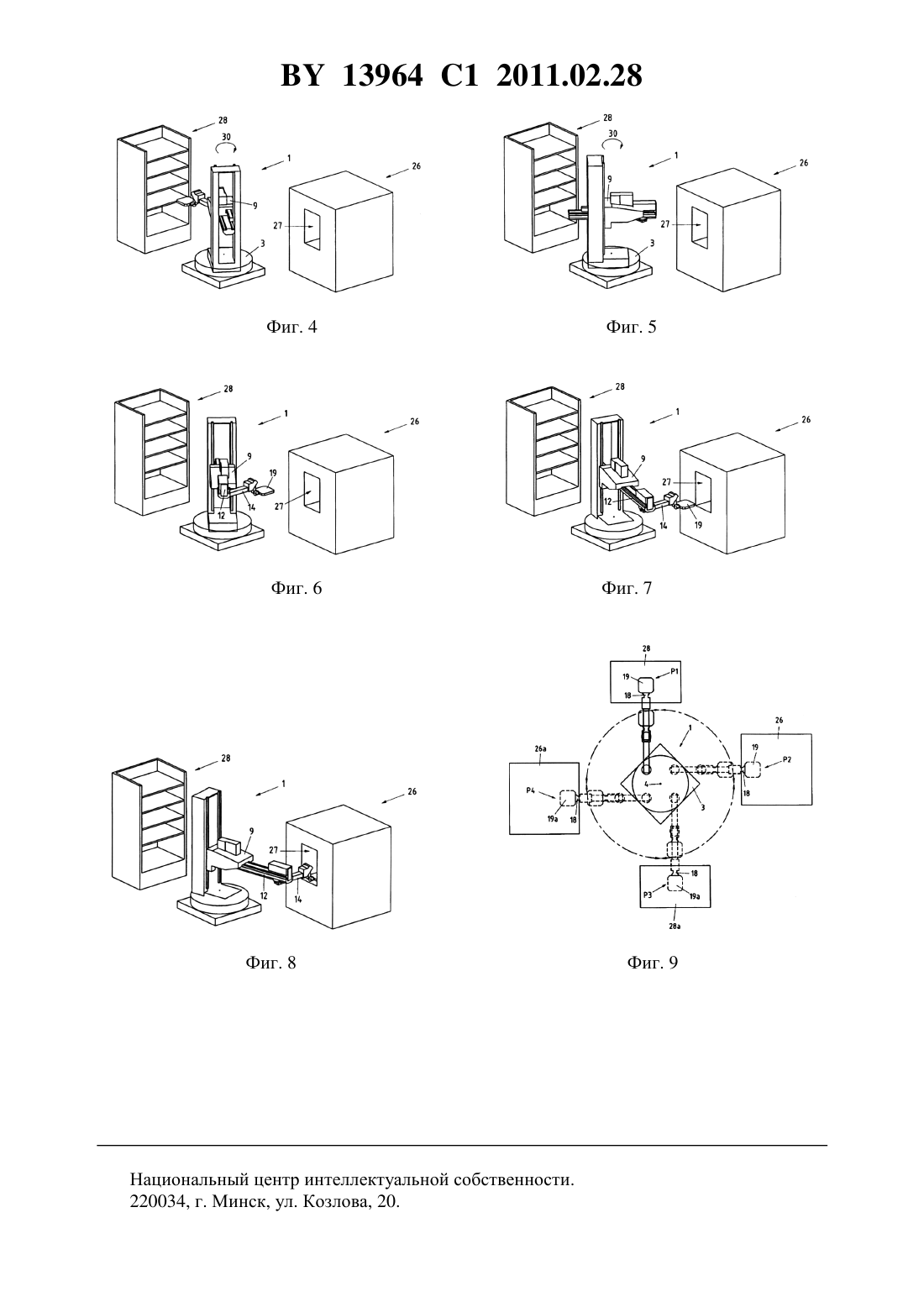
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(57) 1. Манипулятор, содержащий основную стойку (2), расположенную вертикально и имеющую возможность поворота вокруг вертикальной оси (4), горизонтальный кронштейн (12), опирающийся на основную стойку (2) через вертикально перемещающиеся вертикальные салазки (9), а также захват (18), опирающийся опосредованно на горизонтальный кронштейн (12), причем на горизонтальном кронштейне (12) предусмотрен рычаг(14) продольного изгиба, выполненный с возможностью поворота вокруг вертикальной оси (15), на конце которого расположен захват, отличающийся тем, что горизонтальный кронштейн (12) выполнен с возможностью горизонтального перемещения посредством линейной направляющей с опорой на нижнюю часть вертикальных салазок (9). 2. Манипулятор по п. 1, отличающийся тем, что основная стойка (2) закреплена на горизонтально передвигающейся основной каретке (5). 13964 1 2011.02.28 3. Манипулятор по п. 1 или 2, отличающийся тем, что основная стойка (2) может поворачиваться более чем на 360 вокруг вертикальной оси (4). 4. Манипулятор по п. 1, отличающийся тем, что отношение длины рычага (14) продольного изгиба к длине горизонтального кронштейна (12) составляет от 0,41 до 11. 5. Манипулятор по п. 1, отличающийся тем, что захват (18) опирается с помощью шарнирного устройства (16) на рычаг (14) продольного изгиба, причем поворотная ось(17) шарнирного устройства (16) по отношению к перпендикуляру составляет угол от 30 до 60, предпочтительно 45. 6. Манипулятор по п. 1, отличающийся тем, что основная стойка (2), горизонтальный кронштейн (12), а также рычаг (14) продольного изгиба приводятся в движение вокруг соответствующей оси или вдоль соответствующей оси электродвигателем. 7. Манипулятор по п. 1, отличающийся тем, что основная стойка (2) предусмотрена с проходящим в вертикальном направлении вырезом (22), в который может простираться горизонтальный кронштейн (12). 8. Манипулятор по п. 7, отличающийся тем, что вертикальные салазки (9) опираются на основную стойку (2) с возможностью передвижения по обеим сторонам выреза (22). 9. Манипулятор по п. 8, отличающийся тем, что по обеим сторонам выреза (22) расположено по одному проходящему в вертикальном направлении зубчатому рельсу (23,24), при этом зубчатые рельсы (23, 24) служат для направления вертикальных салазок (9),а также для их опоры с закреплением на основной стойке (2). 10. Манипулятор по п. 9, отличающийся тем, что вертикальные салазки (9) снабжены зубчатыми колесами для зацепления с геометрическим замыканием с соответствующим зубчатым рельсом (23, 24), при этом зубчатые колеса приводятся в действие электромотором и выполнены для вертикального перемещения вертикальных салазок (9). 11. Манипулятор по п. 1, отличающийся тем, что основная стойка (2) расположена на поворотном диске (3), вращающемся вокруг вертикальной оси (3). 12. Манипулятор по п. 11, отличающийся тем, что основная стойка (2) расположена по центру на поворотном диске (3). 13. Манипулятор по п. 11, отличающийся тем, что основная стойка (2) расположена на поворотном диске (3) эксцентрично. 14. Манипулятор по п. 1, отличающийся тем, что захват (18) выполнен для охвата обрабатываемых изделий и/или приспособлений для закрепления изделий и/или инструментов. 15. Применение манипулятора (1) по любому из пп. 1-14 для подвода изделий и/или инструментов к металлообрабатывающей машине (26) или выемки изделий и/или инструментов из металлообрабатывающей машины (26). 16. Система металлообрабатывающего оборудования, включающая металлообрабатывающую машину (26), имеющую фронтальное отверстие (27) для подвода и выемки изделий и/или инструментов, а также манипулятор (1) по любому из пп. 1-14, причем манипулятор (1) расположен сбоку фронтального отверстия (27) металлообрабатывающей машины (26). 17. Система по п. 16, отличающаяся тем, что в зоне движения манипулятора (1) расположен магазин (28) для приема инструментов и/или изделий и /или приспособлений для закрепления изделий. 18. Система металлообрабатывающего оборудования, включающая не менее двух металлообрабатывающих машин, каждая из которых имеет фронтальное отверстие (27) для подвода и выемки изделий и/или инструментов и/или приспособлений для закрепления изделий, а также с манипулятором по п. 3, причем манипулятор (1) расположен на каретке(5) с возможностью передвижения вдоль металлообрабатывающих машин и/или поворота более чем на 360 вокруг вертикальной оси (4). 13964 1 2011.02.28 Изобретение касается манипулятора согласно ограничительной части пункта 1 патентной формулы, применения манипулятора согласно пункту 15, а также системы металлообрабатывающего оборудования согласно ограничительной части пункта 16 патентной формулы. Для того чтобы к металлообрабатывающей машине, как, например, к токарному станку, фрезерному станку, отрезному электроэрозионному, прошивному электроэрозионному станку, полностью автоматически подводить обрабатываемое изделие или отводить обработанное изделие, служат известные манипуляторы, такие как, например, роботы. При помощи манипуляторов, о которых идет речь, можно подводить или забирать наряду с изделиями и обрабатывающие инструменты. Из 1481759 известен такого типа манипулятор. Манипулятор имеет горизонтальный портал, по которому может перемещаться горизонтально первая каретка. Первая каретка предусмотрена с продольным несущим элементом, на котором может вертикально перемещаться другая каретка. На другую каретку опирается рычаг, который может поворачиваться вокруг горизонтальной оси. На конце рычага расположен захват для изделий. Манипулятор предназначен для того, чтобы иметь возможность глубоко проникать в боковое отверстие металлообрабатывающей машины. В 2004090186 описан манипулятор такого типа в форме трансфер-робота. Он имеет проходящую в вертикальном направлении, поворотную вокруг вертикальной оси основную стойку, на которую опирается перемещающийся в вертикальном направлении горизонтальный кронштейн. Согласно первому примеру выполнения (варианты 200200), манипулятор состоит из двух аксиально друг за другом и вертикально друг над другом расположенных несущих элементов в виде пластин. Первый несущий элемент жестко связан с двумя расположенными на основной стойке скобами, а второй несущий элемент предусмотрен с вилкообразным элементом, который может перемещаться по оси,поворачиваться вокруг горизонтальной оси. Во втором примере выполнения (варианты 200 и 200 Е) манипулятор предусмотрен с двумя поворотными рычагами, поворотными вокруг одной вертикальной оси каждый, причем вилкообразный элемент может поворачиваться или вокруг горизонтальной или вертикальной оси. Если при первом варианте возможны только очень ограниченные движения вилкообразного элемента, второй вариант с двумя поворотными рычагами, с одной стороны, сравнительно затратный, и, с другой стороны, им можно поднимать только малые грузы. В обоих примерах выполнения робот имеет к тому же ограниченную гибкость, в то время как диапазон движения, а именно горизонтальный путь перемещения захвата, ограничен. Наконец, из 05076965 известен робот, который может перемещаться на шине между двумя горизонтально отстоящими прессами для того, чтобы на прямом пути транспортировать изделия от одного пресса к другому. Робот выполнен так, что его рычаг во время горизонтального перемещения робота одновременно может поворачиваться вокруг вертикальной оси. Целью изобретения является дальнейшее усовершенствование манипулятора согласно ограничительной части пункта 1 формулы изобретения таким образом, чтобы он был универсально применим, был пригоден, особенно предпочтительным образом, подводить к металлообрабатывающей машине спереди изделия или инструменты или отводить их, при этом манипулятор не должен заметно препятствовать доступу к металлообрабатывающей машине и должен быть сравнительно просто и надежно сконструирован. Другая задача изобретения состоит в том, чтобы таким образом создать систему металлообрабатывающего оборудования, которая включает по меньшей мере одну металлообрабатывающую машину, а также один манипулятор, чтобы обеспечить беспрепятственный доступ к металлообрабатывающей машине через фронтальное отверстие. Эти задачи, согласно изобретению, решаются посредством манипулятора, приведенного в пункте 1 формулы изобретения с детализацией по пп. 2-14, применения манипуля 3 13964 1 2011.02.28 тора по п. 15, а также оснащенной предложенным манипулятором системы металлообрабатывающего оборудования по п. 16 и усовершенствованными системами по пп. 17, 18 формулы изобретения. Манипулятор, содержащий основную стойку (2), расположенную вертикально и имеющую возможность поворота вокруг вертикальной оси (4), горизонтальный кронштейн (12), опирающийся на основную стойку (2) через вертикально перемещающиеся вертикальные салазки (9), а также захват (18), опирающийся опосредованно на горизонтальный кронштейн (12), причем на горизонтальном кронштейне (12) предусмотрен рычаг (14) продольного изгиба, выполненный с возможностью поворота вокруг вертикальной оси (15), на конце которого расположен захват, имеет отличие, согласно изобретению, в том, что горизонтальный кронштейн (12) выполнен с возможностью горизонтального перемещения посредством линейной направляющей с опорой на нижнюю часть вертикальных салазок (9). Манипулятор, описанный в первом пункте патентной формулы, с двумя поворотными осями, а также вертикальной и горизонтальной линейной осью имеет высокую гибкость при простой и стабильной конструкции. Заявляемый манипулятор может передвигаться внутри виртуального цилиндрического пространства, за исключением среднего участка, в каждую точку. Линейная направляющая горизонтально перемещающегося горизонтального кронштейна позволяет к тому же большой горизонтальный путь перемещения горизонтального кронштейна и одновременно возможность захвата при сравнительно малых энергозатратах и высокой точности. Зависимые пункты 2-14 определяют предпочтительное дальнейшее усовершенствование манипулятора согласно пункту 1 патентной формулы. Так как основная стойка, как она определена в предпочтительном примере выполнения, расположена на горизонтально перемещающейся основной каретке, повышается гибкость манипулятора, причем увеличивается зона его движения. В другом предпочтительном примере выполнения предусмотрена опора захвата на рычаг продольного изгиба посредством шарнирного устройства, причем поворотная ось шарнирного устройства с перпендикуляром имеет угол между 30 и 60, предпочтительно 45. Это дает возможность охватывать или передавать изделия или инструменты не только горизонтально, но и под углом. Применение манипулятора (1), представленного по пп. 1-14 формулы, предпочтительно для подвода изделий и/или инструментов к металлообрабатывающей машине (26) или извлечения изделий и/или инструментов из металлообрабатывающей машины (26). Система металлообрабатывающего оборудования включает металлообрабатывающую машину (26), имеющую фронтальное отверстие (27) для подвода и выемки изделий и/или инструментов, а также манипулятор (1), который предпочтительно располагают сбоку фронтального отверстия (27) металлообрабатывающей машины (26). При этом в зоне движения манипулятора (1) расположен магазин (28) для приема инструментов и/или изделий и/или приспособлений для закрепления изделий. Усовершенствованная система металлообрабатывающего оборудования включает не менее двух металлообрабатывающих машин, каждая из которых имеет фронтальное отверстие (27) для подвода и выемки изделий и/или инструментов и/или приспособлений для закрепления изделий, причем манипулятор (1) расположен на каретке (5) с возможностью передвижения вдоль металлообрабатывающих машин и/или поворота более чем на 360 вокруг вертикальной оси (4). Далее предпочтительный пример выполнения изобретения подробно поясняется с помощью чертежей. На чертежах показаны фиг. 1 - схематично изображенный манипулятор в первом представлении фиг. 2 - манипулятор согласно фиг. 1 в другом виде фиг. 3-8 - манипулятор в различных фазах во время подвода приспособления для крепления изделия в металлообрабатывающую машину и 4 13964 1 2011.02.28 фиг. 9 - вид сверху на систему металлообрабатывающего оборудования, представленную схематично, с одним манипулятором, двумя металлообрабатывающими станками, а также двумя магазинами. С помощью фиг. 1 поясняется принципиальная конструкция примера выполнения манипулятора согласно изобретению. Манипулятор 1 содержит основную стойку 2, расположенную вертикально на поворотном диске 3. В предлагаемом примере основная стойка 2 размещена по центру на поворотном диске 3, причем возможно, конечно, было бы и эксцентричное расположение. Поворотный диск 3, вращающийся вокруг вертикальной оси 4, закреплен на горизонтально перемещающейся основной каретке 5, которая, как обозначено двойной стрелкой 6, может перемещаться вдоль ходового рельса 7. На вертикальной основной стойке 2 расположены вертикальные салазки 9, перемещающиеся в вертикальном направлении. Направление смещения вертикальных салазок 9 обозначено в свою очередь двойной стрелкой 11. Вертикальные салазки 9 имеют устойчивый несущий элемент, на нижней стороне 10 которого расположен с возможностью перемещения в горизонтальном направлении горизонтальный кронштейн 12, перемещение которого также обозначено двойной стрелкой 13. Горизонтальный кронштейн 12 с помощью линейной направляющей скольжения преимущественно в форме линейного подшипника скольжения, направляющей в форме ласточкина хвоста или рельсовой направляющей опирается на вертикальные салазки 9. Эта линейная направляющая позволяет большой путь передвижения горизонтального кронштейна 12 при сравнительно незначительных затратах энергии. К тому же позволяет повторно точный подвод к заданной горизонтальной позиции. На переднем конце горизонтального кронштейна 12 расположен поворачивающийся вокруг вертикальной оси 15 рычаг 14 продольного изгиба. На рычаге 14 на конце закреплен с помощью шарнирного устройства 16 захват 18, с помощью которого детали, как например инструменты и/или заготовки и/или приспособления для закрепления изделия,могут захватываться и подводиться соответственно к металлообрабатывающему станку и также вновь из него забираться. Шарнирное устройство 16 имеет поворотную ось 17, вокруг которой может поворачиваться захват 18. В предлагаемом примере схематично обозначена плита 19, охватываемая захватом 18, и должна символизировать приспособление для закрепления изделия (поддон) для установки изделия. Обычно на приспособлении 19 для закрепления изделия фиксируется обрабатываемое изделие, причем оно здесь не показано. Разумеется, что захват 18 может иметь различный вид, причем он может предусматриваться, например, с подвижными захватывающими пальцами, зажимными элементами,с геометрическими и/или силовыми захватными элементами и т.д., при этом эти элементы здесь детально не показаны. Захват 18 может, конечно, выполняться и для прямого захвата без укладки на поддон изделий. Поворотная ось 17 шарнирного устройства 16 образует с перпендикуляром угол предпочтительно около 45. Длина рычага 14 продольного изгиба соответствует предпочтительно минимум 0,4 кратной длине горизонтального кронштейна 12. Общепринятое соотношение длины рычага 14 продольного изгиба к длине горизонтального кронштейна 12 лежит между 0,41 и 11. Иначе выражаясь, рычаг 14 продольного изгиба имеет предпочтительную длину, равную минимум 40 , тем не менее максимум 100 , длины горизонтального кронштейна 12. При длине горизонтального кронштейна 12 примерно 2 м рычаг 14 продольного изгиба имеет длину между 0,8 и 2 м. Длина рычага 14 продольного изгиба особенно тогда имеет решающее значение, когда манипулятор 1 расположен сбоку металлообрабатывающей машины. В этом случае длиной рычага 14 продольного изгиба решающим образом определяется, как далеко манипулятор 1 может ввести захват 18 через фронтальное отверстие в металлообрабатывающую машину. Поскольку рычаг 14 определенно короче горизонтального кронштейна 12, последний при полной подвижности рычага 14 продольного изгиба может горизонтально переме 5 13964 1 2011.02.28 щаться примерно на значение разности длин между горизонтальным кронштейном 12 и рычагом 14 продольного изгиба. Абсолютной длиной горизонтального кронштейна 12,как и рычага 14 продольного изгиба, с другой стороны, определяется диапазон движения захвата 18 в радиальном направлении решающе. Вертикальная стойка 2 предусмотрена с двумя боковыми несущими профилями 20, 21,которые между собой граничат через центральный вырез 22. Горизонтальный кронштейн 12 может простираться в этот вырез 22, так что своим обратным концом через этот вырез 22 может выталкиваться назад. Благодаря этому возможен большой путь перемещения горизонтального кронштейна 12. На торцевой стороне каждого несущего профиля 20, 21 укреплено по одной рельсовой направляющей 23, 24, которые вместе служат для направления вертикальных салазок 9. Предпочтительно минимум одна из обеих рельсовых направляющих 23, 24 выполнена в виде зубчатого рельса для того, чтобы зубчатое колесо(не показано), расположенное на вертикальных салазках 9, приводимое в действие электродвигателем, могло врезаться с геометрическим замыканием, чтобы иметь возможность перемещать вертикальные салазки 9 вверх или вниз. Вертикальные салазки 9 предпочтительно также опираются на основную стойку 2 с помощью линейной направляющей. Для этого обе рельсовые направляющие, или зубчатые рельсы 23, 24, предусмотрены с направляющей в форме ласточкина хвоста. Альтернативно для привода зубчатого колеса может предусматриваться, например, привод шпинделя, в частности с шариковым циркуляционным ходовым винтом для вертикальных салазок 9. Оба варианта привода позволяют в любом случае повторно точный подвод заданной вертикальной позиции. Поворотный диск 3, основная каретка 5, вертикальные салазки 9, горизонтальный кронштейн 12, а также рычаг 14 продольного изгиба могут перемещаться электрическим двигателем вокруг соответствующей оси или вдоль соответствующей оси, при этом относящиеся электрические приводы не показаны. Захват 18 также может поворачиваться электрическим двигателем вокруг оси 17 шарнирного устройства 16. Соответствующие приводы вместе с относящимися передачами выполнены так, что внутри всего диапазона движения возможен повторно точный подвод к соответствующей позиции. На фиг. 2 показан манипулятор 1 согласно фиг. 1, причем основная каретка 5 сдвинута немного влево, в то время как вертикальные салазки 9 переместились немного вниз и горизонтальный кронштейн 12 сдвинут немного назад. К тому же захват 18 вместе с приспособлением 19 для закрепления изделия повернут шарнирным устройством 16 на 180. С помощью примера далее поясняется в основном принцип действия манипулятора 1,при этом для разъяснений делается ссылка на фиг. 3-8. На этих фигурах в каждом случае манипулятор 1 представлен вместе со схематично показанной металлообрабатывающей машиной 26, а также магазином 28 для приема изделий и/или приспособлений для закрепления изделий и/или инструментов. Манипулятор 1 расположен сбоку металлообрабатывающей машины 26, при этом металлообрабатывающая машина 26 имеет фронтальное отверстие 27, через которое машина в основном доступна и через которое изделия или инструменты могут подаваться или забираться. Из-за бокового расположения манипулятора 1 в нормальном случае, т.е. когда манипулятор находится в своем положении покоя повернутым от металлообрабатывающей машины 26, возможен беспрепятственный доступ к металлообрабатывающей машине 26 через ее фронтальное отверстие 27. Из изображений согласно фиг. 3 и 4 к тому же видно, что горизонтальный кронштейн 12 может простираться через вырез 22 в основной стойке 2. На фиг. 3 показано, как захват 18 берет из кассеты 29 магазина 28 приспособление 19 для закрепления изделия. Для этого сначала приспособление 19 для закрепления изделия охватывается с помощью захвата 18, вертикальные салазки 9 затем немного поднимаются и горизонтальный кронштейн 12 опускается вниз. В заключение поворотный диск 3, как обозначено стрелкой 30 на фиг. 4 и 5,поворачивается по часовой стрелке, при этом во время процесса поворота вертикальные салазки 9 уже могут переместиться в желаемое вертикальное положение. 6 13964 1 2011.02.28 На фиг. 6 манипулятор 1 показан незадолго до окончания поворота. Чтобы приспособление 19 для закрепления изделия из этого положения можно было подвести к металлообрабатывающей машине 26, горизонтальный кронштейн 12 перемещается вперед и одновременно рычаг 14 продольного изгиба подается в то положение, из которого приспособление 19 для закрепления изделия может через фронтальное отверстие 27 подводиться к металлообрабатывающей машине 26, как это показано на фиг. 7. Как видно на фиг. 7 и 8, приспособление для закрепления изделия подводится к металлообрабатывающей машине 26 через фронтальное отверстие 27, при этом собственно подвод происходит комбинированным движением частей манипулятора 1, а именно поворотным движением поворотного диска 3 вместе с вертикальным перемещением вертикальных салазок 9, горизонтальным смещением горизонтального кронштейна 12, а также одновременным ввертыванием рычага 14 продольного изгиба. Из изображений согласно фиг. 7 и 8 к тому же видно, что рычаг продольного изгиба должен иметь определенную минимальную длину, чтобы захват при боковом расположении манипулятора 1 мог вводиться соответственно глубоко в отверстие 27. В связи с этим оказалось, что длина рычага 14 продольного изгиба предпочтительно соответствует минимум 0,4 - кратной длине горизонтального кронштейна 12. Поскольку основная стойка 2 закреплена на горизонтально перемещающейся основной каретке 5 (фиг. 1), к этому можно еще добавить накладываемое движение основной каретки 5. Предусмотреть каретку 5 имеет смысл особенно тогда, когда манипулятор 1 должен обслуживать несколько металлообрабатывающих машин и/или могут из нескольких магазинов извлекаться изделия или инструменты и соответственно должны в них укладываться. В зависимости от расположения и применения манипулятора 1 имеет смысл выполнить поворотный диск 3 таким образом, чтобы он мог поворачиваться более чем на 360 вокруг вертикальной оси 4. Представленный манипулятор 1 конструктивно сравнительно прост и может изготавливаться выгодно по затратам, так как только двигатель, предназначенный для перемещения вертикальных салазок 9, должен иметь сравнительно высокую мощность, чтобы можно было поднять и большие нагрузки. По сравнению с этим двигатели, предусматриваемые соответственно для движения основной каретки 5, как и горизонтального кронштейна 12 и рычага 14 продольного изгиба, выбираются соответственно малой мощности,так как они не должны поднимать нагрузки, а наряду с ускоряемой массой в основном должны преодолевать только силы трения. В любом случае показанный манипулятор 1 пригоден и для манипулирования изделиями или инструментами с весом свыше 100 кг. К тому же манипулятор 1 универсально применим, и захват 18 может повторно точно подводить в позиции, лежащие внутри его области применения. В заключение на фиг. 9 показан вид сверху на схематично представленную систему металлообрабатывающего оборудования, которая включает манипулятор 1, две металлообрабатывающие машины 26, 26, а также два магазина 28, 28. Обе металлообрабатывающие машины 26, 26 и магазины 28, 28 расположены вдоль кругового кольца вокруг манипулятора 1. Поэтому манипулятор 1 в этом случае не должен располагаться на одной горизонтально перемещающейся основной каретке, а достаточно расположить манипулятор 1 на плите 3, поворотной вокруг вертикальной оси 4. Предпочтительно манипулятор 1 в этом случае может поворачиваться вокруг вертикальной оси 4 более чем на 360, благодаря чему скорость манипулирования для определенных случаев применения может значительно возрастать, как поясняется далее на примере. Если, например, к машине 26 необходимо подвести обрабатываемое изделие 19 из магазина 28, то манипулятор 1 сначала должен привести свой захват 18 в позицию 1. Затем должен произойти поворот на 90 по часовой стрелке, чтобы захват 18 мог занять позицию 2, в которой изделие 19 может быть подведено к машине 26. В следующий раз надо 7 13964 1 2011.02.28 из магазина 28 к машине 26 подвести изделие 19. Для этого манипулятор 1 должен сначала снова выполнить поворот на 90 по часовой стрелке, чтобы захват 18 занял позицию 3. Из позиции 3 манипулятор 1 должен выполнить еще раз поворот на 90 по часовой стрелке, чтобы можно было подвести изделие 19 к машине 26. Поскольку манипулятор 1 может поворачиваться вокруг вертикальной оси 4 более чем на 360, то он теперь еще одним поворотом на 90 по часовой стрелке может взять из магазина 28 изделие и затем подвести к машине 26. В любом случае поворотный процесс в этом случае может уменьшиться с 270 до 90, вследствие чего значительно увеличится скорость. Разумеется, что описанный процесс имеет лишь характер примера. В любом случае манипулятор 1 может брать из обоих магазинов 28, 28 изделия или/и инструменты и их подводить к каждой из двух машин 26, 26, при этом поворотное движение манипулятора 1 должно составить максимум 180. Благодаря тому, что манипулятор имеет основную стойку, которая может поворачиваться вокруг вертикальной оси, и горизонтальный кронштейн, опирающийся на основную стойку через вертикально перемещающиеся вертикальные салазки, причем горизонтальный кронштейн посредством линейной направляющей опирается на вертикальные салазки с возможностью горизонтального перемещения, и горизонтальный кронштейн имеет рычаг продольного изгиба, который может поворачиваться вокруг вертикальной оси и на котором на конце расположен захват,манипулятор применим универсально и подходит в наибольшей степени для подведения или отведения изделий или инструментов с фронтальной стороны металлообрабатывающей машины. Манипулятор такой конструкции может располагаться сбоку от металлообрабатывающей машины, чем обеспечивается беспрепятственный к ней доступ. К тому же манипулятор имеет хорошую подвижность и большой радиус действия захвата. Благодаря сравнительно небольшому числу конструктивных деталей в сочетании с небольшим количеством линейных и поворотных осей он к тому же сконструирован сравнительно просто и стабильно, так что может воспринимать и большие нагрузки. Комбинированное движение нескольких элементов манипулятора оптимизирует процесс движения и уменьшает время обращения. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
Метки: манипулятор
Код ссылки
<a href="https://by.patents.su/9-13964-manipulyator.html" rel="bookmark" title="База патентов Беларуси">Манипулятор</a>
Манипулятор
Номер патента: U 1137
Опубликовано: 30.12.2003
Авторы: Колесников Иван Федорович, Коничев Алексей Викторович
МПК: B66C 23/10
Метки: манипулятор
Текст:
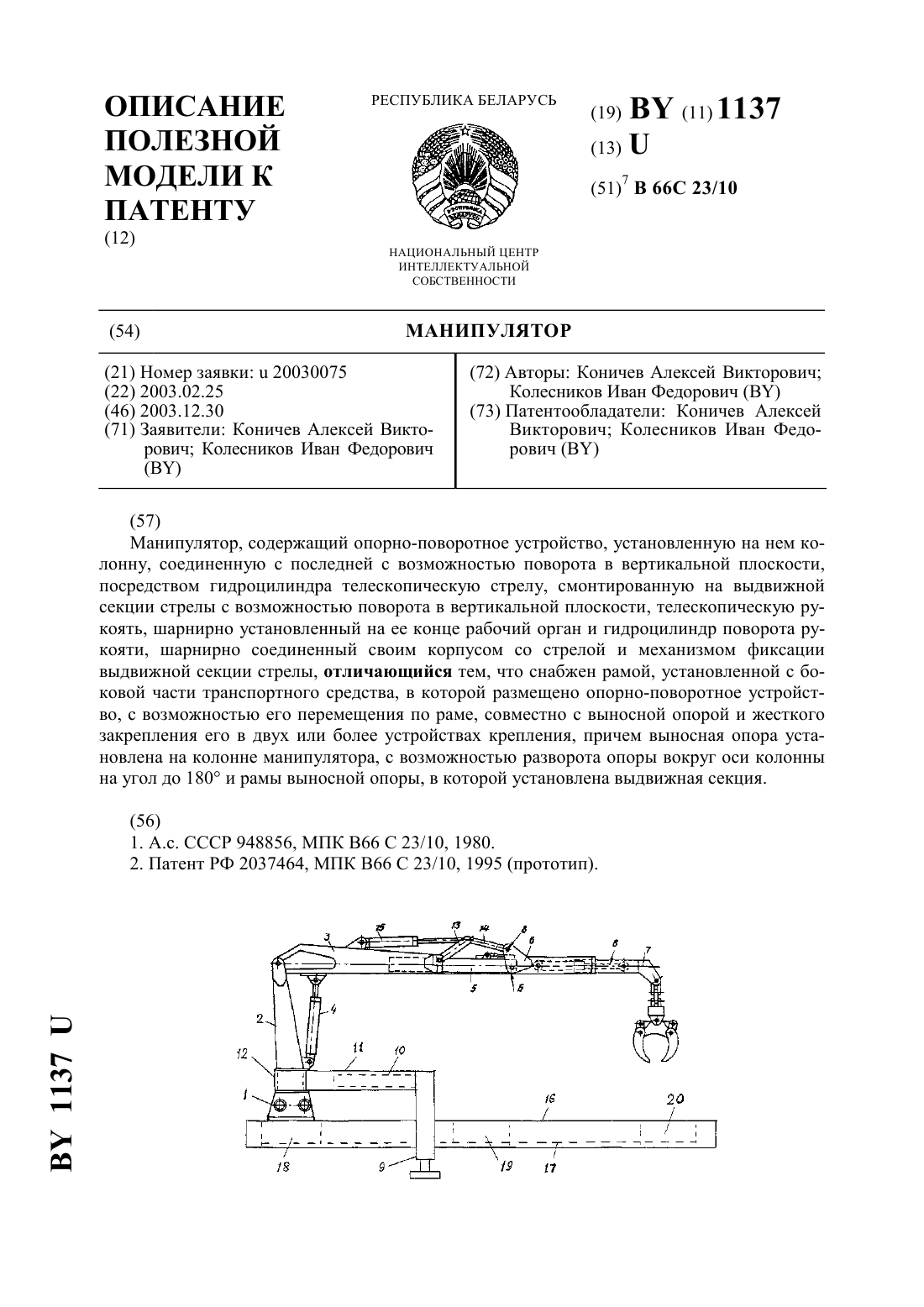
...установленную на нем колонну,соединенную с последней с возможностью поворота в вертикальной плоскости, посредством гидроцилиндра телескопическую стрелу, смонтированную на выдвижной секции стрелы с возможностью поворота в вертикальной плоскости, телескопическую рукоять,шарнирно установленный на ее конце рабочий орган и гидроцилиндр поворота рукояти,шарнирно соединенный своим корпусом со стрелой и механизмом фиксации выдвижной секции стрелы,...
Манипулятор

Номер патента: U 3066
Опубликовано: 30.10.2006
Авторы: Дашков Владимир Николаевич, Пунько Андрей Иванович, Китиков Вадим Олегович, Сорокин Эдуард Петрович
МПК: A01J 7/00
Метки: манипулятор
Текст:
...повышение скорости молокоотдачи, а также надежности работы доильной установки за счет упрощения конструкции манипулятора, исключение необходимости процесса додоя коровы. Указанный технический результат достигается тем, что в манипуляторе, содержащим доильный аппарат, пневмоцилиндр снятия доильного аппарата с гибкой связью, водило,которое свободно посажено одним концом во внутреннюю трубу и соединено с ней при помощи троса, перекинутого...
Манипулятор
Номер патента: U 5892
Опубликовано: 28.02.2010
Авторы: Литвиновский Николай Григорьевич, Шмидман Михаил Александрович
МПК: B23Q 7/04, B23Q 7/14, B23Q 7/06...
Метки: манипулятор
Текст:
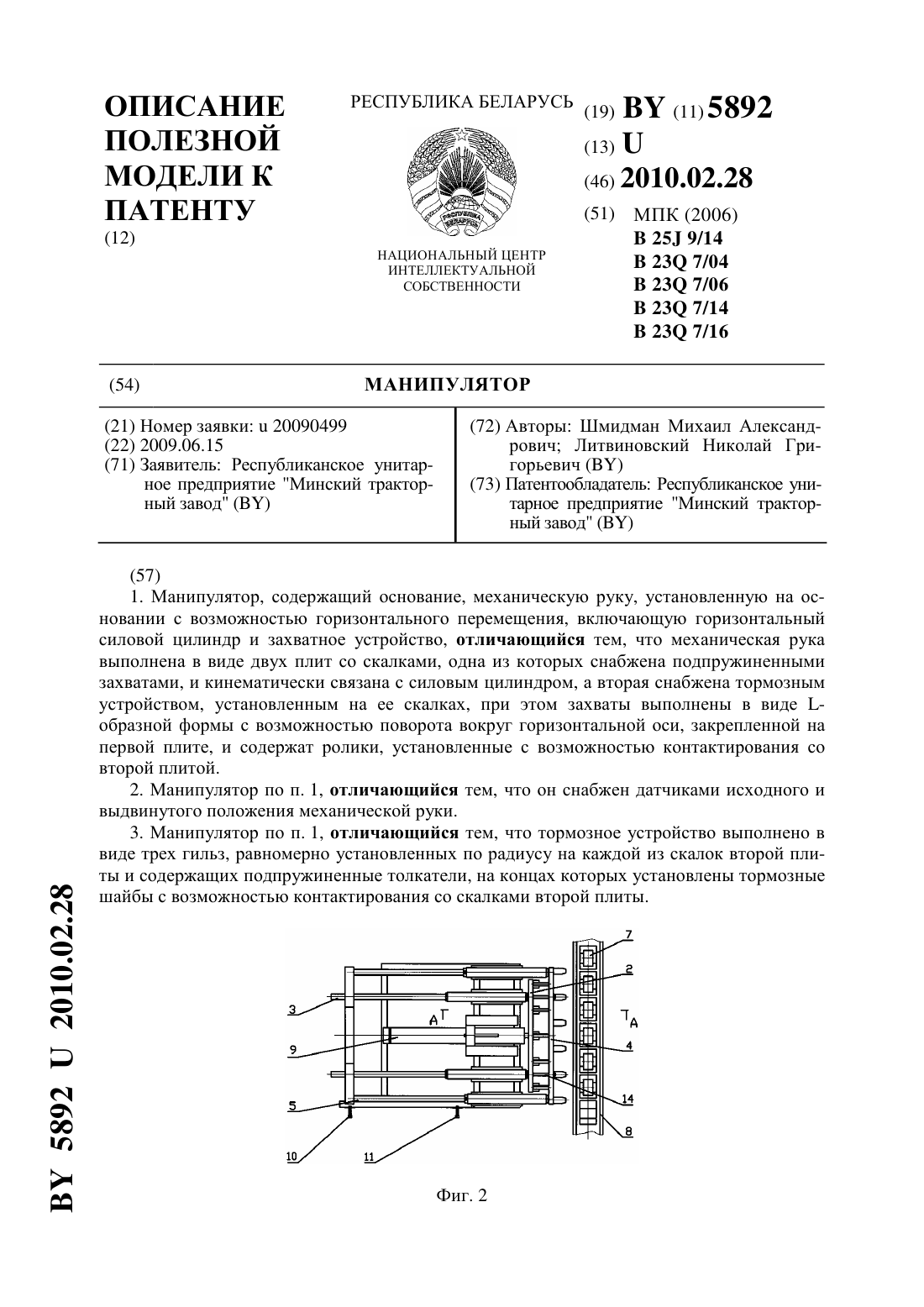
...одна из которых снабжена подпружиненными захватами, и кинематически связана с силовым цилиндром, а вторая снабжена тормозным устройством, установленным на ее скалках. При этом захваты выполнены в виде -образной формы с возможностью поворота вокруг горизонтальной оси,закрепленной на первой плите, и содержат ролики, установленные с возможностью контактирования со второй плитой. Манипулятор снабжен датчиками исходного и выдвинутого положения...
Манипулятор для автоматического снятия подвесной части доильного аппарата
Номер патента: U 381
Опубликовано: 30.12.2001
Авторы: Сорокин Эдуард Петрович, Китиков Вадим Олегович, Передня Владимир Иванович
МПК: A01J 7/00
Метки: манипулятор, доильного, аппарата, снятия, автоматического, подвесной, части
Текст:
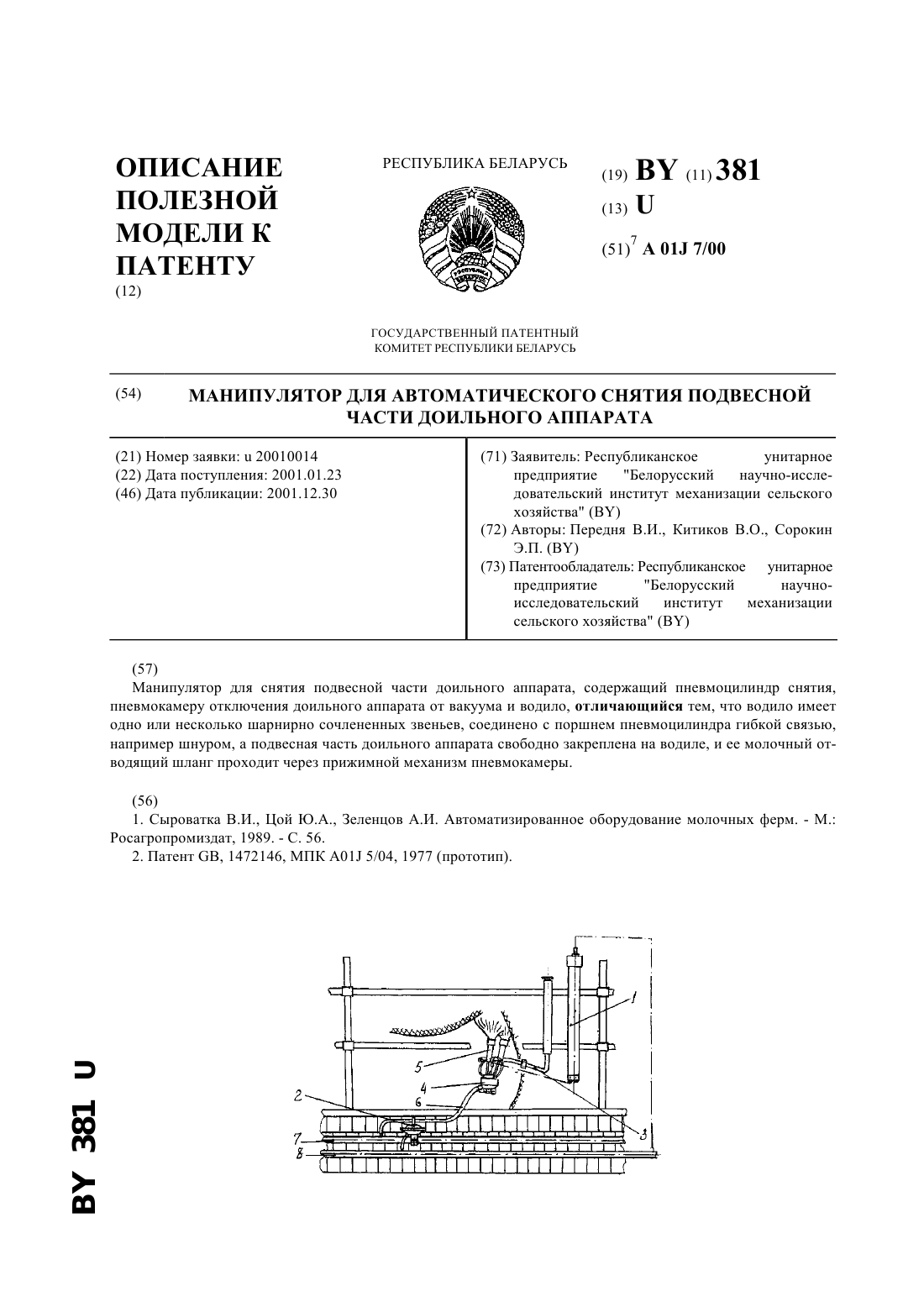
...(стягивания) подвесной части доильного аппарата. 2. Возможность падения и загрязнения доильных стаканов во время снятия вследствие незначительного нарушения регулировки манипулятора. Задачей полезной модели является ликвидация передачи болевызывающих усилий на соски вымени и исключение падения и загрязнения доильных стаканов во время их автоматического снятия. Указанный результат достигается тем, что манипулятор включает пневмоцилиндр...
Манипулятор

Номер патента: U 3069
Опубликовано: 30.10.2006
Авторы: Передня Владимир Иванович, Лосик Сергей Викторович, Сорокин Эдуард Петрович
МПК: A01J 7/00
Метки: манипулятор
Текст:
...на разной высоте от пола. Это нередко вызывает необходимость снятия доильного аппарата с манипулятора и доить коров без него. Задачей полезной модели является повышение производительности труда операторов машинного доения и компактности манипулятора. Указанный технический результат достигается тем, что водило свободно посажено одним концом во внутренней в трубе и соединено в ней с пневмоцилиндром, внутри которого имеется пружина с поршнем,...
Предыдущий патент: Плуг для профилирования поверхности почвы
Следующий патент: Трансформатор высокого напряжения
Случайный патент: Ветродвигатель