Способ частотно-временного преобразования случайного сигнала нелинейного динамического объекта
Номер патента: 16579
Опубликовано: 30.12.2012
Авторы: Куконин Владимир Егорович, Петько Валерий Иванович, Хитриков Сергей Владимирович

Текст
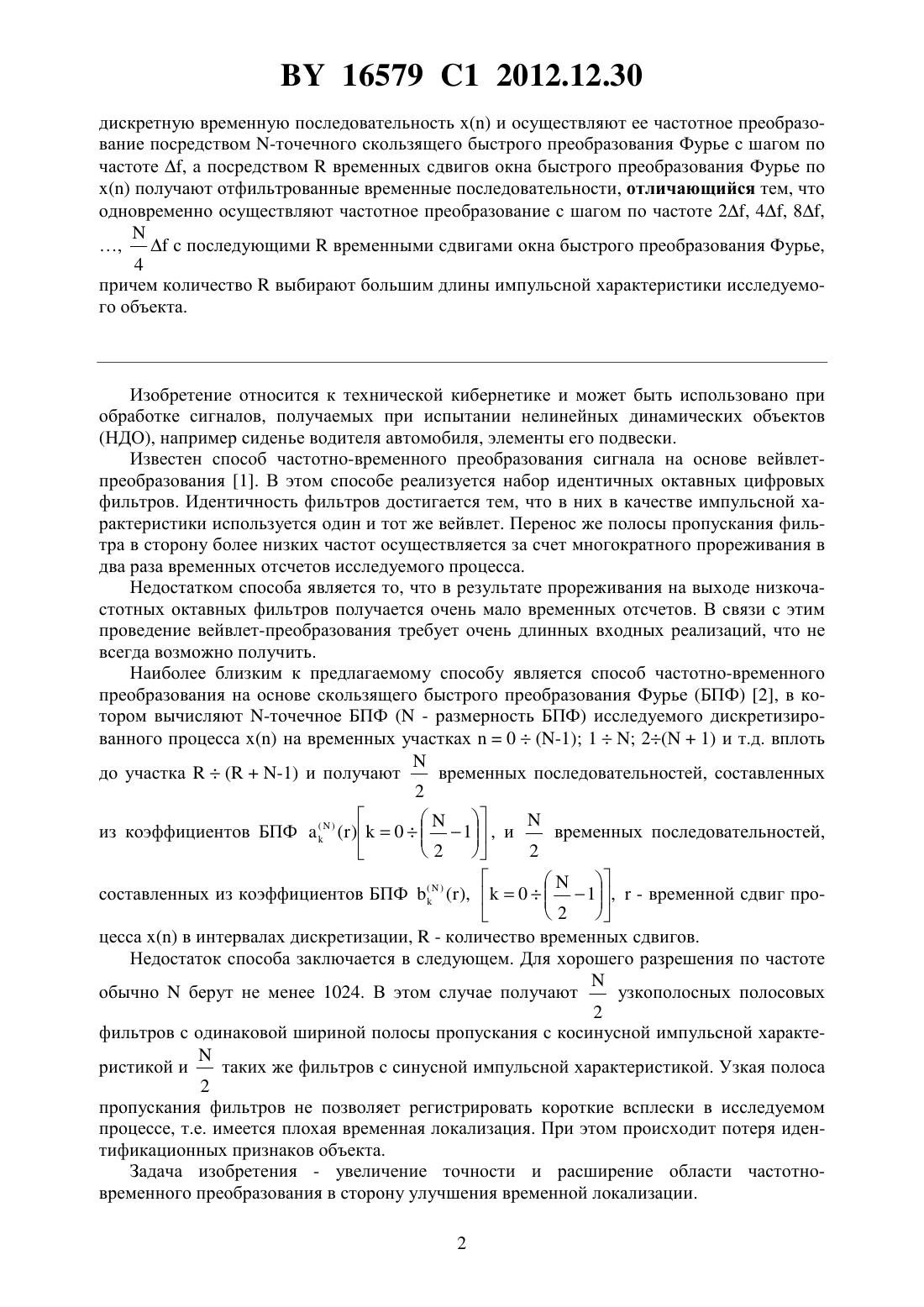
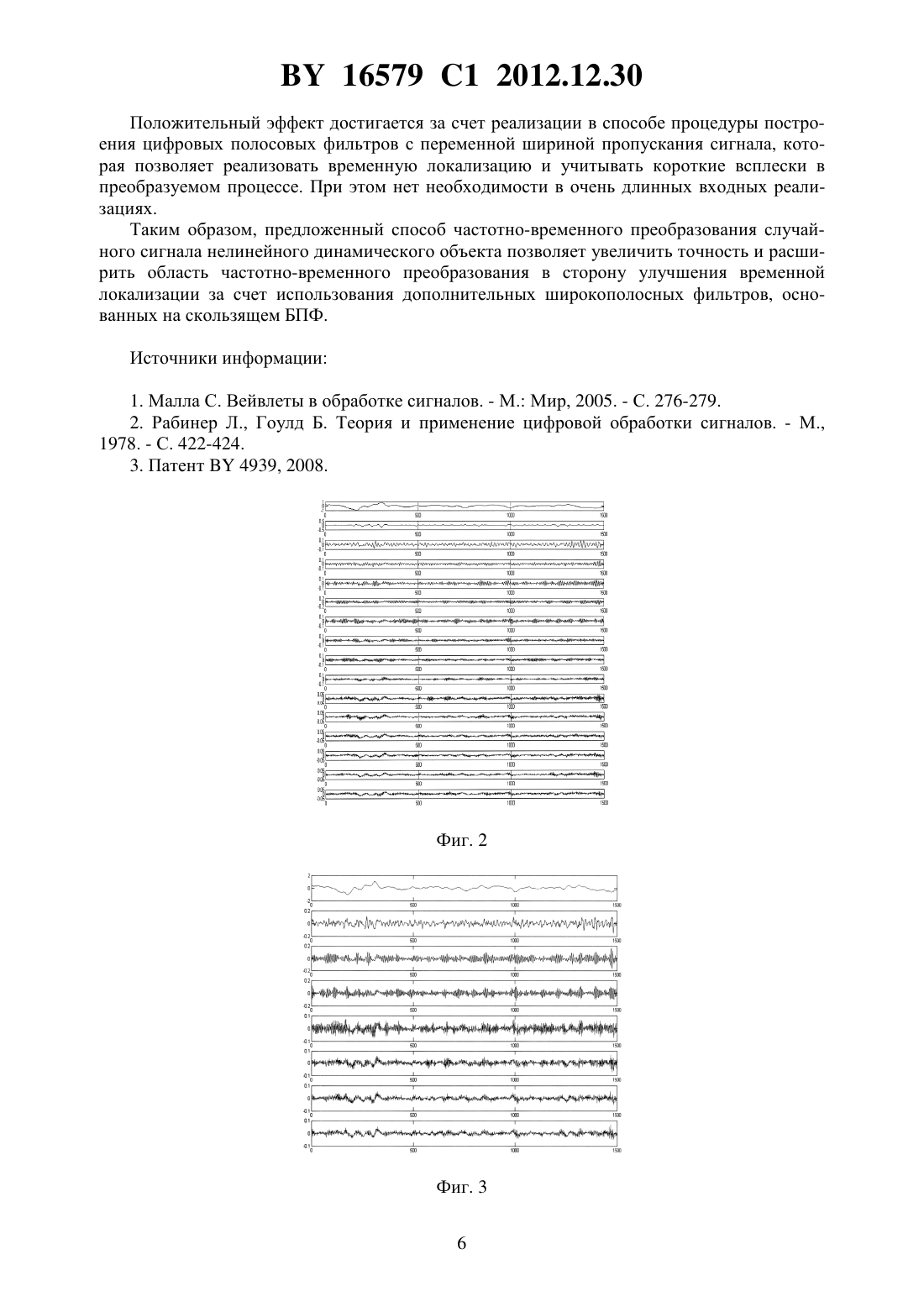
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ЧАСТОТНО-ВРЕМЕННОГО ПРЕОБРАЗОВАНИЯ СЛУЧАЙНОГО СИГНАЛА НЕЛИНЕЙНОГО ДИНАМИЧЕСКОГО ОБЪЕКТА(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Петько Валерий Иванович Куконин Владимир Егорович Хитриков Сергей Владимирович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(56) РАБИНЕР Л. и др. Теория и применение цифровой обработки сигналов. М. Мир, 1978. - С. 422-424.2405163 1, 2010.99122726 , 2001.2004106034 , 2005.1803880 1, 1993.1390784 1, 1988.5373460 , 1994.0828239 2, 1998.(57) Способ частотно-временного преобразования случайного сигнала нелинейного динамического объекта, при котором преобразуют посредством фильтрации выходной непрерывный случайный временной электрический сигналисследуемого объекта в 16579 1 2012.12.30 дискретную временную последовательностьи осуществляют ее частотное преобразование посредством -точечного скользящего быстрого преобразования Фурье с шагом по частоте , а посредствомвременных сдвигов окна быстрого преобразования Фурье по получают отфильтрованные временные последовательности, отличающийся тем, что одновременно осуществляют частотное преобразование с шагом по частоте 2, 4, 8,с последующимивременными сдвигами окна быстрого преобразования Фурье 4 причем количествовыбирают большим длины импульсной характеристики исследуемого объекта. Изобретение относится к технической кибернетике и может быть использовано при обработке сигналов, получаемых при испытании нелинейных динамических объектов(НДО), например сиденье водителя автомобиля, элементы его подвески. Известен способ частотно-временного преобразования сигнала на основе вейвлетпреобразования 1. В этом способе реализуется набор идентичных октавных цифровых фильтров. Идентичность фильтров достигается тем, что в них в качестве импульсной характеристики используется один и тот же вейвлет. Перенос же полосы пропускания фильтра в сторону более низких частот осуществляется за счет многократного прореживания в два раза временных отсчетов исследуемого процесса. Недостатком способа является то, что в результате прореживания на выходе низкочастотных октавных фильтров получается очень мало временных отсчетов. В связи с этим проведение вейвлет-преобразования требует очень длинных входных реализаций, что не всегда возможно получить. Наиболее близким к предлагаемому способу является способ частотно-временного преобразования на основе скользящего быстрого преобразования Фурье (БПФ) 2, в котором вычисляют -точечное БПФ ( - размерность БПФ) исследуемого дискретизированного процессана временных участках 0(-1) 12(1) и т.д. вплоть временных последовательностей, составленных до участка(-1) и получают 2 из коэффициентов БПФ( ) ( )01 , и временных последовательностей,составленных из коэффициентов БПФ( ) ( ),01,- временной сдвиг про цессав интервалах дискретизации,- количество временных сдвигов. Недостаток способа заключается в следующем. Для хорошего разрешения по частоте обычноберут не менее 1024. В этом случае получают узкополосных полосовых 2 фильтров с одинаковой шириной полосы пропускания с косинусной импульсной характе таких же фильтров с синусной импульсной характеристикой. Узкая полоса ристикой и 2 пропускания фильтров не позволяет регистрировать короткие всплески в исследуемом процессе, т.е. имеется плохая временная локализация. При этом происходит потеря идентификационных признаков объекта. Задача изобретения - увеличение точности и расширение области частотновременного преобразования в сторону улучшения временной локализации. 16579 1 2012.12.30 Поставленная задача достигается тем, что в способе частотно-временного преобразования случайного сигнала нелинейного динамического объекта, при котором преобразуют посредством фильтрации выходной непрерывный случайный временной электрический сигналисследуемого объекта в дискретную временную последовательностьи осуществляют ее частотное преобразование посредством -точечного скользящего быстрого преобразования Фурье с шагом по частоте , а посредствомвременных сдвигов окна быстрого преобразования Фурье пополучают отфильтрованные временные последовательности, причем, согласно изобретению, одновременно осуществляют частотное с последующимивременныпреобразование с шагом по частоте 2, 4, 84 ми сдвигами окна быстрого преобразования Фурье, а количествовыбирают большим длины импульсной характеристики исследуемого объекта. На фиг. 1 представлена схема для реализации способа. На фиг. 2-5 приведены результаты анализа плавности хода грузового автомобиля, а именно частотно-временное преобразование вертикальных ускорений на полу автомобиля при использовании скользящих БПФ с размерностями 32 16 8 и 4 соответственно. Устройство содержит блок 1 аналого-цифрового преобразования, блок 2 определения степени нелинейности нелинейного динамического объекта (НДО), делитель 3, преобразователь 4, содержащий блок 4-1 скользящего -точечного БПФ, блок 4-2 скользящего/2-точечного БПФ, блок 4-3 скользящего /4-точечного БПФ блок 4- скользящего 4 точечного БПФ. В качестве блока 2 определения степени нелинейности нелинейного динамического объекта может быть использовано известное устройство 3. Управляющий вход блока 1 аналого-цифрового преобразования соединен с первым выходом блока 2 определения степени нелинейности НДО, второй выход которого соединен с входом делителя 3, а третий выход блока 2 определения степени нелинейности НДО соединен со вторыми входами блоков 4-1, 4-2, 4-3, , 4- скользящих БПФ, первые входы которых соединены с выходом блока 1 аналого-цифрового преобразования, а первый, второй, третий, , -й выходы делителя 3 соединены с третьими входами соответствующих блоков 4-1, 4-2, 4-3, , 4- скользящих БПФ преобразователя 4. Входом устройства являются управляющий вход Пуск и информационный вход в блока 2 определения степени нелинейности НДО, а также информационный вход блока 1 аналого-цифрового преобразования, а выходами устройства являются первые и вторые выходы блоков 4-1, 4-2, 4-3 4- скользящих БПФ. Работа устройства происходит следующим образом. В блок 2 определения степени нелинейности НДО заносится высшая частота в, до которой будет производиться частотно-временное преобразование. По заданной высшей частоте в в блоке 2 вычисляют значение интервала дискретизацииреализации случайного входного воздействия (интервал запуска блока 1 АЦП) 1 и округляют полученное значениедо большего числа из ряда чисел 2 (2, 3,). По длинеимпульсной характеристики объекта в блоках 4-1, 4-2, 4-3, , 4- скользящих БПФ преобразователя 4 находят количествоскольжений. При этомдолжно превышать длинуимпульсной характеристики объекта. Это требование исходит из то 3 16579 1 2012.12.30 го, что динамические свойства объекта полностью проявляются только на временном участке, равном или большем длины импульсной характеристики объекта. По значению размерностив делителе 3 получают набор чисел , /2, /4, , 4, которые поступают на третьи входы блоков 4-1, 4-2, 4-3, , 4- соответственно скользящих БПФ преобразователя 4. Эти числа задают размерности скользящих БПФ, реализуемые в указанных блоках. По команде Пуск начинает работать блок 1 аналого-цифрового преобразования. Входной непрерывный сигналпреобразуется в дискретный сигнал , который подается на первые входы блоков 4-1, 4-2, 4-3, , 4- скользящих БПФ преобразователя 4. С помощью блока 4-1 осуществляют -точечное БПФ реализации исследуемого дискретизированного процессана временных участках 0(-)12(1) и т.д. временных последовательностей, совплоть до участка(-1) иполучают 2 ставленных из коэффициентов БПФ( ) ( )01 , и тельностей, составленных из коэффициентов БПФ( ) ( )01,- временной сдвиг процессав интервалах дискретизации. Скользящее БПФ можно представить как набор полосовых фильтров с косинусными и синусными импульсными характеристиками. Амплитудно-частотные характеристики этихфильтров имеют вид функции,(3)2 где- интервал дискретизации. Ширина гл главного лепестка у всех фильтров одинакова и определяется как(4) гл 2,где- шаг по частоте нескользящего БПФ 1 Еслиизмерять в секундах, то частоты получим в Гц. Из (3) и (5) видно, что центральные частоты фильтров скользящего БПФ располагаются через интервалы, равные шагу по частоте нескользящего БПФ. Из (3) также видно, что при частотно-временном преобразовании нами используются 1, пофильтры с центральными частотами, не превышающие частоту Найквиста скольку остальные фильтры являются только зеркальными отображениями используемых фильтров. Зеркально отображенные фильтры являются чисто математическими, так как в дискретизированном сигнале частот свыше частоты Найквиста не существует. Частоты свыше частоты Найквиста вследствие явления подмены частоты смещаются в область низких частот, не выходящих за частоту Найквиста. Хорошее частотно-временное преобразование должно обеспечивать хорошую локализацию по частоте и по времени. Исходя из принципа неопределенности Гейзенберга, эти требования противоречивы. 16579 1 2012.12.30 Для обеспечения хорошей локализации по частоте необходимо использовать полосовые фильтры с очень узкой полосой пропускания. Но в этом случае фильтр будет иметь длинную импульсную характеристику и он не способен реагировать на быстрые изменения исследуемого процесса, т.е. он имеет плохую локализацию по времени. Для хорошей локализации по времени необходимо использовать фильтры с довольно широкой полосой пропускания. Но в этом случае фильтр будет иметь короткую импульсную характеристику и он не способен реагировать на медленные изменения исследуемого процесса. Поэтому для хорошего частотно-временного преобразования необходимо использовать как узкополосные, так и широкополосные фильтры. Из (4, 5) видно, что многоточечное скользящее БПФ ( велико) реализует узкополосные полосовые фильтры, а малоточечное - широкополосные. На этом основан принцип предлагаемого частотно-временного преобразования сигнала. После того как проведено -точечное скользящее БПФ, выполняется-точечное скользящее БПФ и т.д. вплоть до проведения 4-точечного скользящее БПФ,4 скользящего БПФ. При этом полосы пропускания реализуемых фильтров будут расширяться обратно пропорционально размерности используемого БПФ. Естественно, что количество фильтров при этом будет уменьшаться и при 4-точечном БПФ получим один полосовой фильтр с косинусной импульсной характеристикой (1,0,-1,0), один полосовой фильтр с синусной импульсной характеристикой (0,1,0,-1), а также фильтр нижних частот,характеризующий изменение постоянной составляющей исследуемого процесса на участке длиной 4 временных отсчета с импульсной характеристикой (1,1,1,1). Пример реализации способа. В качестве примера было проведено частотно-временное преобразование виброускорений на полу кабины автомобиля МАЗ 3544003931010 при следующих условиях движение по булыжному шоссе со скоростью 40 км/ч, интервал дискретизации по времени- 210-3 с, размерностьисходного БПФ взята равной 32. Исходя из длины импульсной характеристики, равной 500 временных отсчетов, числоскольжений приняли равным 1500. На фиг. 2-5 показаны результаты экспериментов при различных размерностяхскользящего БПФ. При этом показаны массивы только для , поскольку они в отличие отпозволяют видеть изменение и постоянной составляющей ускорений на различных временных участках. Причем первый сверху массив представляет собой временной процесс а 0, второй сверху массив - а 1 и т.д. Из приведенных фигур видно, что интенсивность колебаний в полосах пропускания фильтров (особенно в области высоких частот) возрастает при переходе от 32-точечного скользящего БПФ к 16-точечному и т.д. Это объясняется расширением ширины полосы пропускания фильтров основанных на скользящем БПФ при переходе его от большой размерности к меньшей. В свою очередь расширение полосы пропускания фильтров позволяет регистрировать короткие всплески в исследуемом процессе, т.е. улучшается временная локализация. Это хорошо видно на низкочастотных составляющих процесса. Так, на фиг. 2 процес сы 0 ( ) и 1) ) ( ) имеют довольно гладкий вид, на фиг. 3 процессы 0) / 2 ) ( ) и 1) / 2 ) ( ) имеют уже не такой гладкий вид, на фиг. 4 процессы 0) / 4 ) ( ) и 1) / 4 ) ( ) оказываются в 4 4 значительной степени изрезанными, а на фиг. 5 процессы 0 ( ) и 1 ( ) оказываются в сильной степени изрезанными. Сильная изрезанность процесса означает то, что в нем зарегистрированы короткие всплески, т.е. имеется хорошая временная локализация. 16579 1 2012.12.30 Положительный эффект достигается за счет реализации в способе процедуры построения цифровых полосовых фильтров с переменной шириной пропускания сигнала, которая позволяет реализовать временную локализацию и учитывать короткие всплески в преобразуемом процессе. При этом нет необходимости в очень длинных входных реализациях. Таким образом, предложенный способ частотно-временного преобразования случайного сигнала нелинейного динамического объекта позволяет увеличить точность и расширить область частотно-временного преобразования в сторону улучшения временной локализации за счет использования дополнительных широкополосных фильтров, основанных на скользящем БПФ. Источники информации 1. Малла С. Вейвлеты в обработке сигналов. - М. Мир, 2005. - С. 276-279. 2. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. - М.,1978. - С. 422-424. 3. Патент 4939, 2008. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01R 23/16
Метки: нелинейного, динамического, преобразования, частотно-временного, случайного, объекта, сигнала, способ
Код ссылки
<a href="https://by.patents.su/7-16579-sposob-chastotno-vremennogo-preobrazovaniya-sluchajjnogo-signala-nelinejjnogo-dinamicheskogo-obekta.html" rel="bookmark" title="База патентов Беларуси">Способ частотно-временного преобразования случайного сигнала нелинейного динамического объекта</a>
Способ идентификации нелинейного динамического объекта
Номер патента: 13749
Опубликовано: 30.10.2010
Авторы: Самута Андрей Михайлович, Куконин Владимир Егорович, Петько Валерий Иванович, Выставная Елена Ивановна
МПК: G06F 17/14, G05B 17/00
Метки: нелинейного, динамического, способ, идентификации, объекта
Текст:
...идентификации в виде уравнений где у - отклик -й модели( ) - отсчеты -й импульсной характеристики объекта идентификации,определяют интервал в упомянутых моделях, которому соответствует , и осуществляют формирование модели объекта идентификации, причем корректировку упомянутыхчастотных характеристик объекта идентификации на нулевой частоте осуществляют путем принятия коэффициента 00 при быстром преобразовании Фурье отклика уг и коэффициента 00...
Способ идентификации нелинейного динамического объекта
Номер патента: 10526
Опубликовано: 30.04.2008
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Выставная Елена Ивановна
МПК: G06G 7/00
Метки: идентификации, способ, объекта, динамического, нелинейного
Текст:
..., ) отклика НДО 1(1) . г г Для определения размерности дискретного преобразования Фурье (ДПФ), используемого при идентификации объекта, сначала определяют длину импульсной характеристики(ИХ) НДО 1. Для этого на вход НДО 1 с помощью стенда 7 подают небольшой испытательный сигнал Хи с постоянными мгновенными значениями и после установления отклика и резко убирают входной сигнал. Время от момента снятия сигнала до момента полного затухания...
Способ идентификации нелинейного динамического объекта
Номер патента: 15668
Опубликовано: 30.04.2012
Авторы: Петько Валерий Иванович, Куконин Владимир Егорович, Самута Андрей Михайлович, Хитриков Сергей Владимирович
МПК: G05B 17/00
Метки: идентификации, нелинейного, способ, объекта, динамического
Текст:
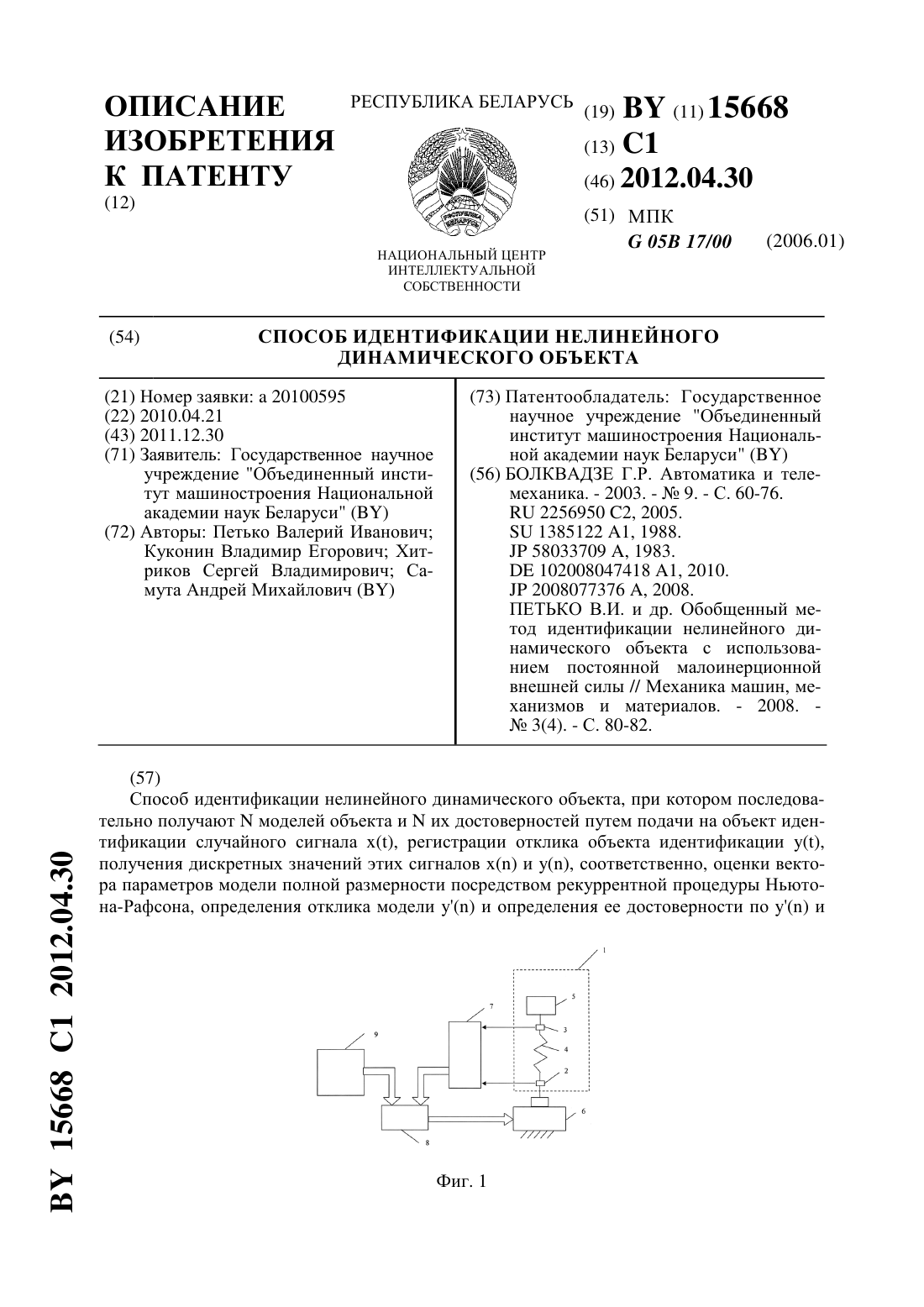
...значений 2 15668 1 2012.04.30 этих сигналови , соответственно, оценки вектора параметров модели полной размерности посредством рекуррентной процедуры Ньютона-Рафсона, определения отклика моделии определения ее достоверности пои , причем для каждой модели изгенерируют априорные сведения о нелинейном динамическом объекте с заданием вида нелинейности, максимально допустимого количества нулей и полюсов и максимально допустимой задержки путем...
Устройство для определения степени нелинейности нелинейного динамического объекта
Номер патента: U 4939
Опубликовано: 30.12.2008
Авторы: Выставная Елена Ивановна, Петько Валерий Иванович, Куконин Владимир Егорович
МПК: G06G 7/00
Метки: динамического, степени, нелинейности, устройство, объекта, определения, нелинейного
Текст:
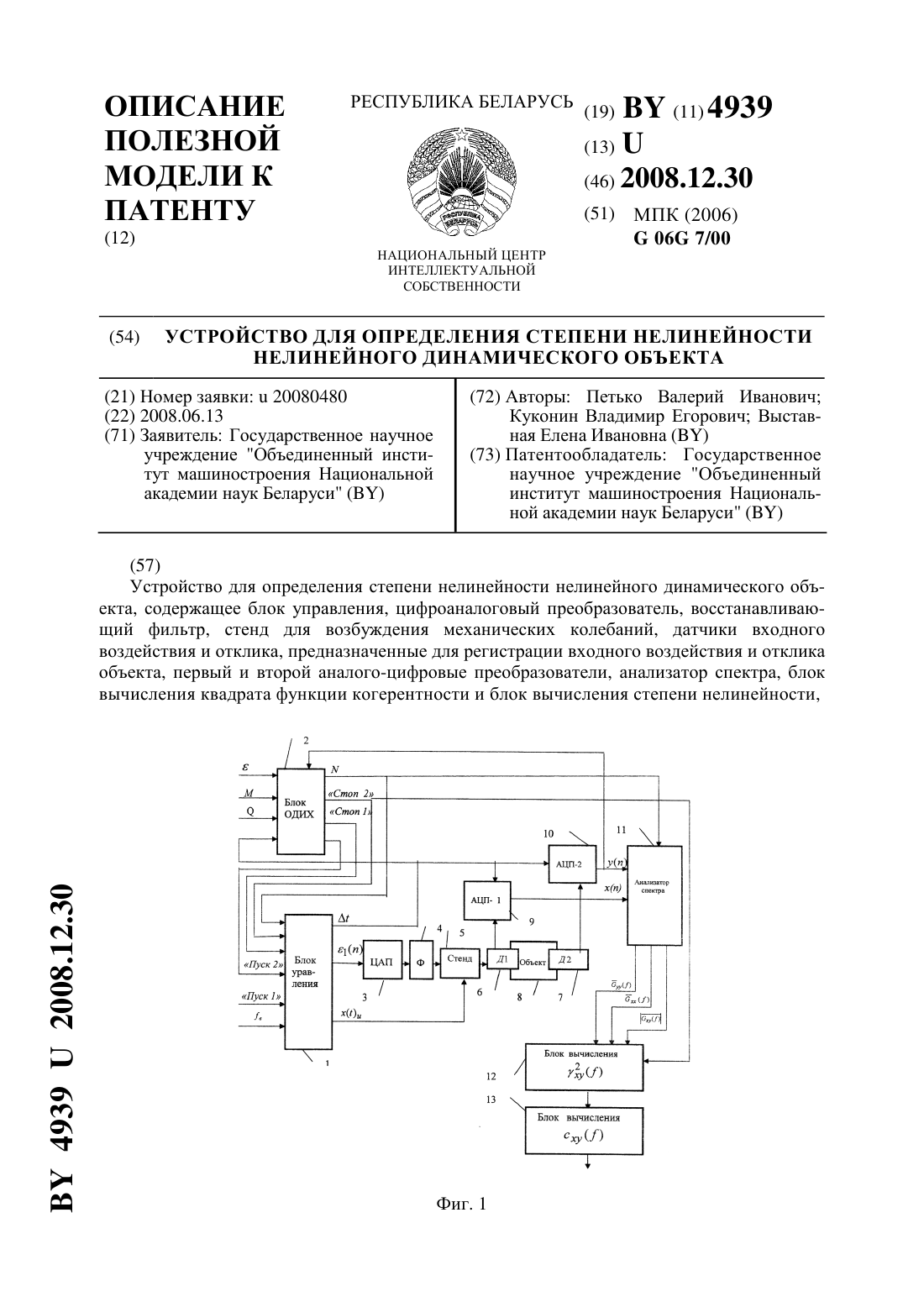
...для регистрации входного воздействия и отклика объекта 8, первый 9 и второй 10 аналого-цифровые преобразователи, анализатор 11 спектра, блок 12 вычисления квадрата функции когерентности и блок 13 вычисления степени нелинейности, причем первый выход блока 1 управления соединен со вторым входом стенда 5, второй выход блока 1 управления соединен со входом цифроаналогового преобразователя 3, выход которого соединен со входом...
Способ генерирования частотно-модулированного электрического сигнала
Номер патента: 16619
Опубликовано: 30.12.2012
Авторы: Ильинков Валерий Андреевич, Ильинкова Анна Валерьевна, Ярков Ярослав Михайлович
МПК: H03C 3/00
Метки: электрического, способ, частотно-модулированного, сигнала, генерирования
Текст:
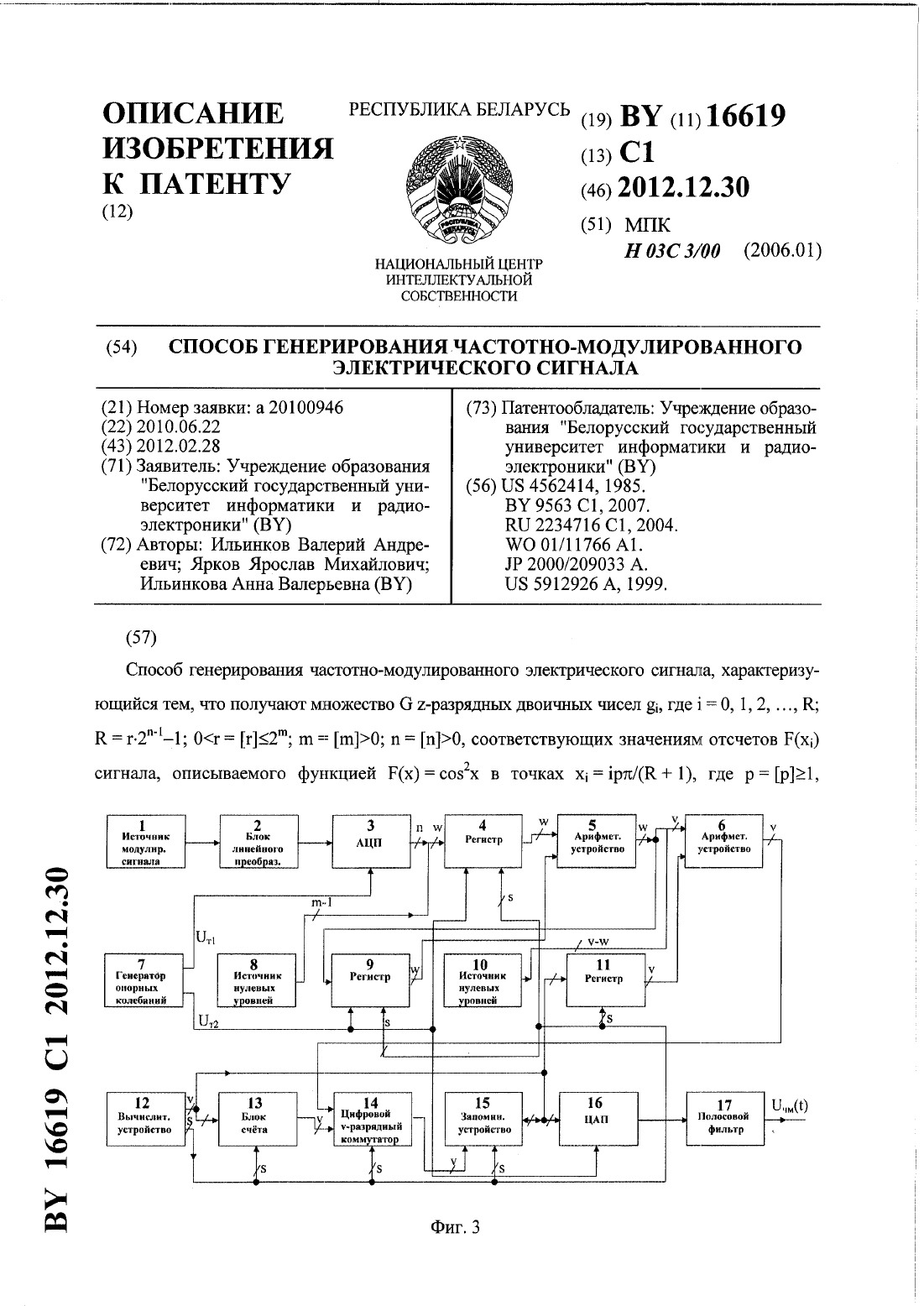
...с перестраиваемой частотой образуетсяошибки, прямо пропорциональный разности фаз вспомогательного ивспомогательного опорного колебаний, который управляет частотой угенерирования ЧМ сигнала реализуется устройством, структурная схема которого приведена на фиг. 1. Она содержит источник 1 модулирующего сигнала, блок 2 линейного преобразования,аналого-Цифровой преобразователь (АЦП) 3, генератор 7 опорного колебания, преобразователь 18 кода,...
Предыдущий патент: Полуфабрикат мясной рубленый
Следующий патент: Способ получения порошка нанокристаллического гидроксиапатита
Случайный патент: Устройство для укупорки бутылок