Полугусеничный ход
Номер патента: U 6847
Опубликовано: 30.12.2010
Авторы: Бобровник Александр Иванович, Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич
Текст
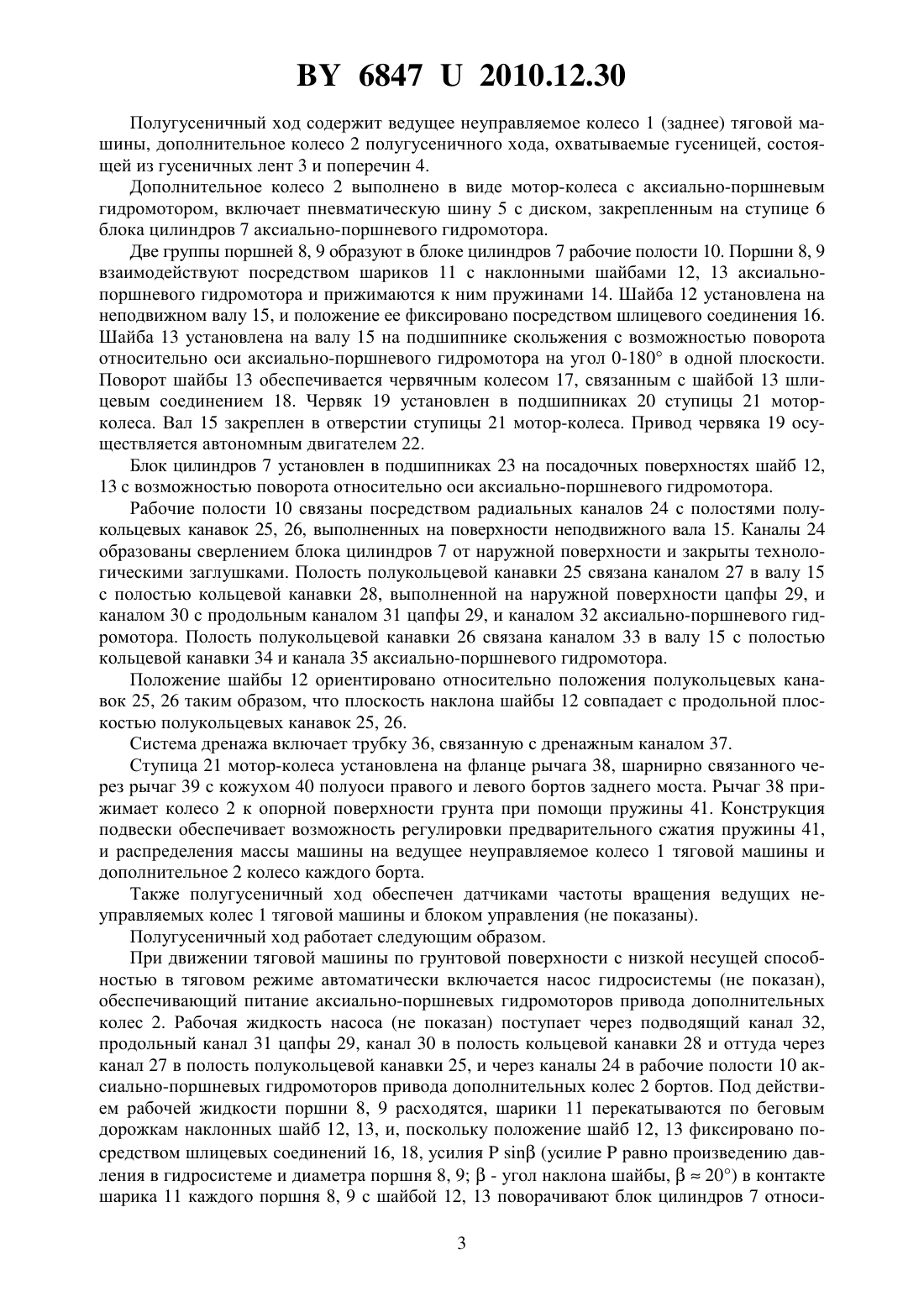
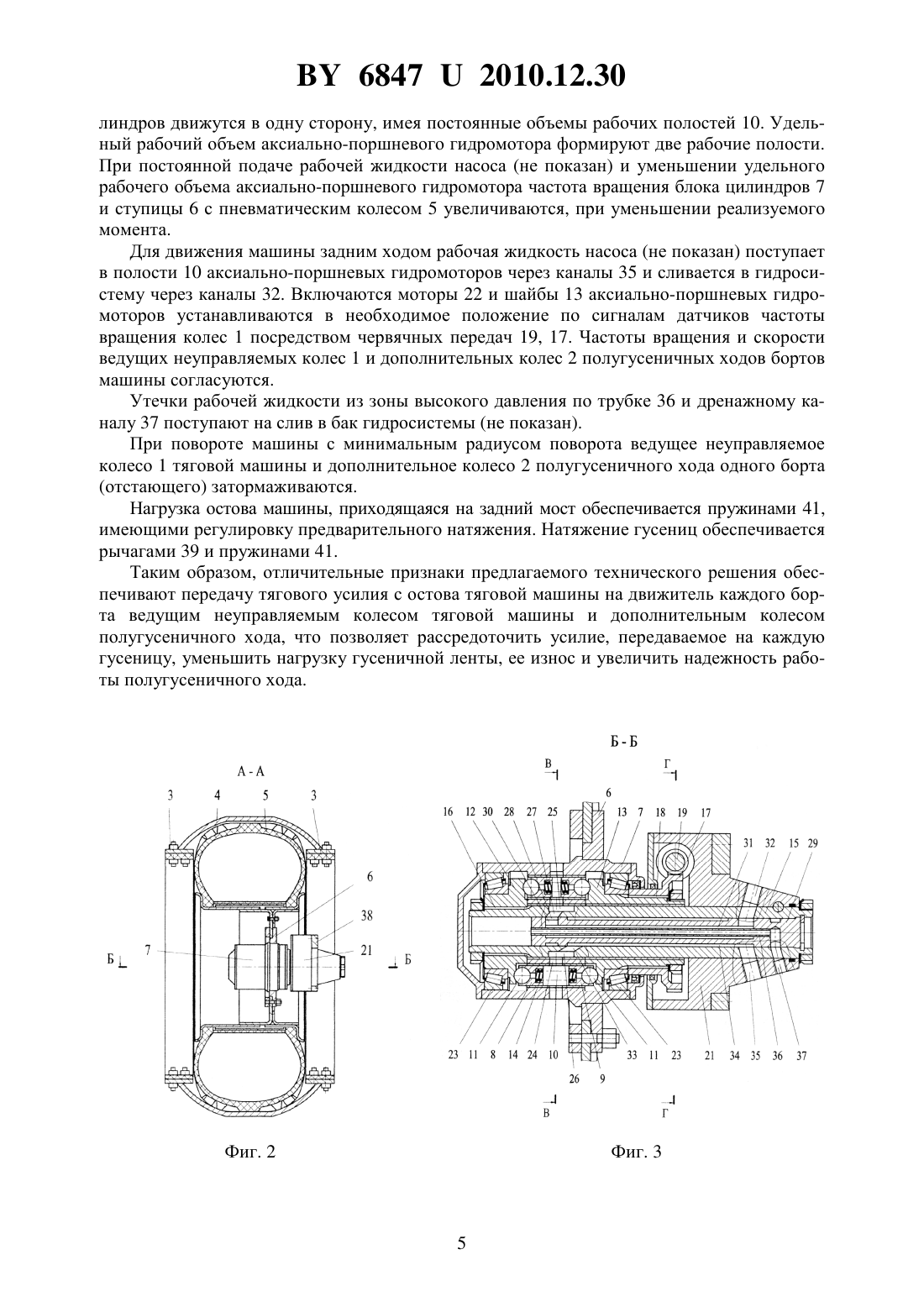
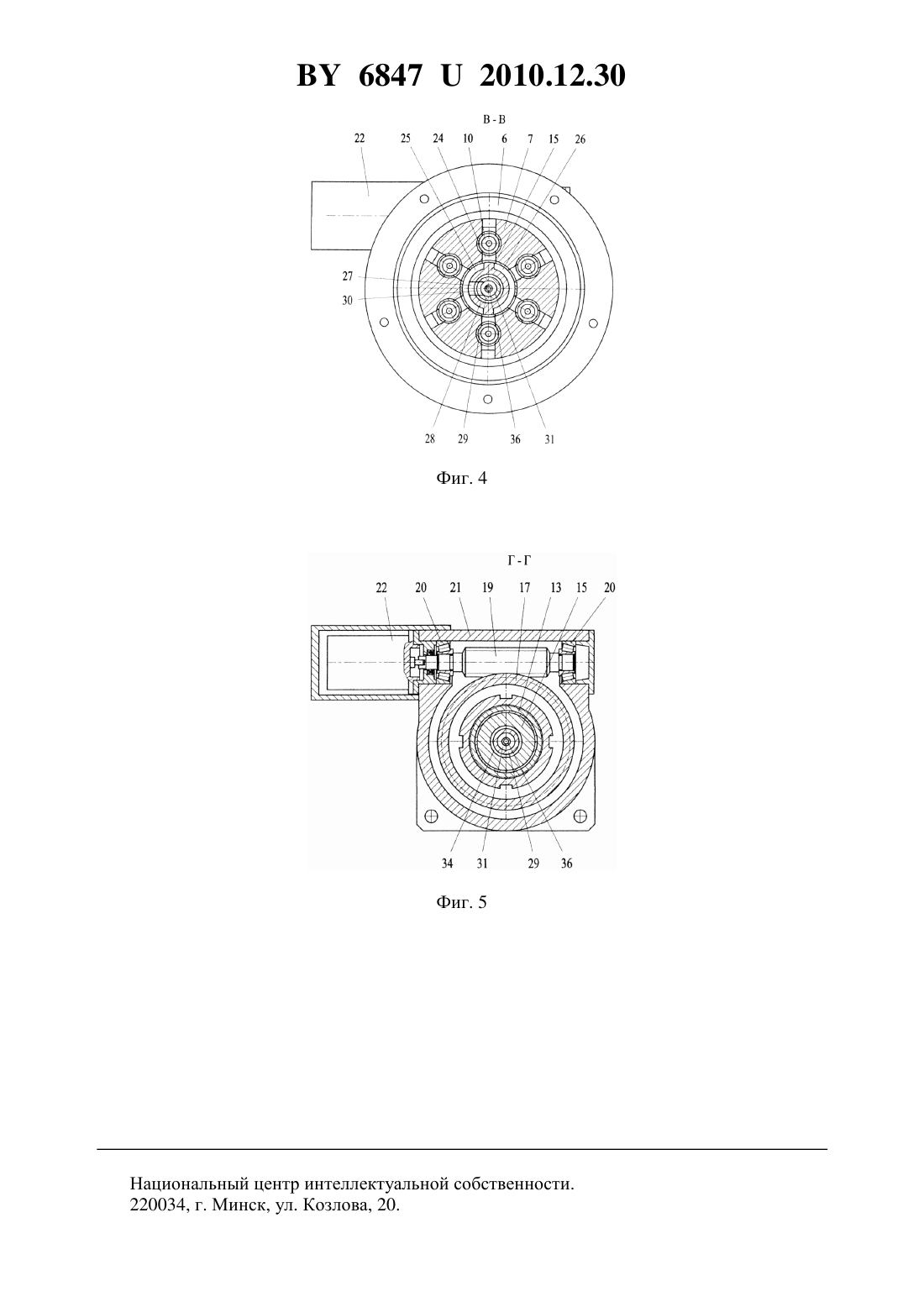
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Бобровник Александр Иванович Котлобай Анатолий Яковлевич Котлобай Андрей Анатольевич(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) 1. Полугусеничный ход, содержащий ведущее неуправляемое колесо тяговой машины и дополнительное, установленное на рычаге, связанном шарнирно с кожухом полуоси ведущего колеса, и гусеницу, охватывающую ведущее неуправляемое и дополнительное колеса, отличающийся тем, что дополнительное колесо выполнено в виде мотор-колеса с аксиально-поршневым гидромотором, содержащим блок цилиндров со ступицей крепления диска дополнительного колеса, установленный с возможностью вращения на неподвижном валу, закрепленном на рычаге подвески дополнительного колеса две группы поршней, образующих в блоке цилиндров рабочие полости, связанные с подводящим и отводящим каналами аксиально-поршневого гидромотора, и взаимодействующих посредством шариков с двумя наклонными шайбами аксиально-поршневого гидромотора. 2. Полугусеничный ход по п. 1, отличающийся тем, что одна из наклонных шайб аксиально-поршневого гидромотора установлена на валу с возможностью поворота относительно оси аксиально-поршневого гидромотора на угол 0-180 в одной плоскости и связана с зубчатым колесом червячного зацепления, взаимодействующим с червяком,установленным в подшипниковом узле корпуса аксиально-поршневого гидромотора, и приводимым во вращение от вала автономного двигателя.(56) 1. Попов Д.А., Попов Е.Г., Волошин Ю.Л., Кутин Л.Н., Субботин В.Н. Системы подрессоривания современных тракторов (Конструкция, теория и расчет). - М. Машиностроение, 1974. - 176 с. Рис. 24. - С. 32. Полезная модель относится к транспортному машиностроению, преимущественно к ходовым частям колесных тяговых машин высокой проходимости. Известен полугусеничный ход, содержащий ведущее неуправляемое колесо тяговой машины, и дополнительное, установленное на рычаге, связанном шарнирно с кожухом полуоси ведущего колеса, и гусеницу, охватывающую ведущее и дополнительное колеса 1. Известный полугусеничный ход обеспечивает повышение тяговых качеств и проходимости колесной тяговой машины при выполнении технологических операций на заболоченных и влажных почвах. Полугусеничный ход легко монтируется и демонтируется в эксплуатационных условиях. Применение полугусеничного хода позволяет расширить область применения колесных тяговых машин в различных природно-климатических условиях. Недостатком известного полугусеничного хода являются низкая надежность работы. Это объясняется тем, что при выполнении технологических операций с высокими тяговыми нагрузками вся тяговая нагрузка гусеничного движителя, реализуемая опорной ветвью гусеничной цепи - от дополнительного колеса до ведущего неуправляемого колеса тяговой машины, - воспринимается двумя эластичными гусеничными лентами с максимальным значением нагрузки в зоне контакта гусеничной ленты с ведущим неуправляемым колесом, гусеничные ленты вытягиваются и разрушаются, нарушая надежную работу полугусеничного хода. Задачей, решаемой полезной моделью, является увеличение надежности полугусеничного хода. Решение поставленной задачи достигается тем, что в полугусеничном ходе, содержащем ведущее неуправляемое колесо тяговой машины и дополнительное, установленное на рычаге, связанном шарнирно с кожухом полуоси ведущего колеса, и гусеницу, охватывающую ведущее неуправляемое и дополнительное колеса, дополнительное колесо выполнено в виде мотор-колеса с аксиально-поршневым гидромотором, содержащим блок цилиндров со ступицей крепления диска дополнительного колеса, установленный с возможностью вращения на неподвижном валу, закрепленном на рычаге подвески дополнительного колеса две группы поршней, образующих в блоке цилиндров рабочие полости,связанные с подводящим и отводящим каналами аксиально-поршневого гидромотора, и взаимодействующих посредством шариков с двумя наклонными шайбами аксиальнопоршневого гидромотора, при этом одна из наклонных шайб аксиально-поршневого гидромотора установлена на валу с возможностью поворота относительно оси аксиальнопоршневого гидромотора на угол 0-180 в одной плоскости и связана с зубчатым колесом червячного зацепления, взаимодействующим с червяком, установленным в подшипниковом узле корпуса аксиально-поршневого гидромотора, и приводимым во вращение от вала автономного двигателя. Существенные отличительные признаки предлагаемого технического решения обеспечивают передачу тягового усилия с остова тяговой машины на движитель каждого борта ведущим неуправляемым колесом тяговой машины и дополнительным колесом, что позволит рассредоточить усилие, передаваемое на каждую гусеничную ленту, и пропорционально уменьшить нагрузку гусеничной ленты, ее износ и увеличить надежность полугусеничного хода. На фиг. 1 представлен полугусеничный ход с ведущим неуправляемым колесом тяговой машины и дополнительным колесом на фиг. 2 - разрез А-А на фиг. 1 на фиг. 3 - разрез Б-Б на фиг. 2 на фиг. 4 - разрез В-В на фиг. 3 на фиг. 5 - разрез Г-Г на фиг. 3. 2 68472010.12.30 Полугусеничный ход содержит ведущее неуправляемое колесо 1 (заднее) тяговой машины, дополнительное колесо 2 полугусеничного хода, охватываемые гусеницей, состоящей из гусеничных лент 3 и поперечин 4. Дополнительное колесо 2 выполнено в виде мотор-колеса с аксиально-поршневым гидромотором, включает пневматическую шину 5 с диском, закрепленным на ступице 6 блока цилиндров 7 аксиально-поршневого гидромотора. Две группы поршней 8, 9 образуют в блоке цилиндров 7 рабочие полости 10. Поршни 8, 9 взаимодействуют посредством шариков 11 с наклонными шайбами 12, 13 аксиальнопоршневого гидромотора и прижимаются к ним пружинами 14. Шайба 12 установлена на неподвижном валу 15, и положение ее фиксировано посредством шлицевого соединения 16. Шайба 13 установлена на валу 15 на подшипнике скольжения с возможностью поворота относительно оси аксиально-поршневого гидромотора на угол 0-180 в одной плоскости. Поворот шайбы 13 обеспечивается червячным колесом 17, связанным с шайбой 13 шлицевым соединением 18. Червяк 19 установлен в подшипниках 20 ступицы 21 моторколеса. Вал 15 закреплен в отверстии ступицы 21 мотор-колеса. Привод червяка 19 осуществляется автономным двигателем 22. Блок цилиндров 7 установлен в подшипниках 23 на посадочных поверхностях шайб 12,13 с возможностью поворота относительно оси аксиально-поршневого гидромотора. Рабочие полости 10 связаны посредством радиальных каналов 24 с полостями полукольцевых канавок 25, 26, выполненных на поверхности неподвижного вала 15. Каналы 24 образованы сверлением блока цилиндров 7 от наружной поверхности и закрыты технологическими заглушками. Полость полукольцевой канавки 25 связана каналом 27 в валу 15 с полостью кольцевой канавки 28, выполненной на наружной поверхности цапфы 29, и каналом 30 с продольным каналом 31 цапфы 29, и каналом 32 аксиально-поршневого гидромотора. Полость полукольцевой канавки 26 связана каналом 33 в валу 15 с полостью кольцевой канавки 34 и канала 35 аксиально-поршневого гидромотора. Положение шайбы 12 ориентировано относительно положения полукольцевых канавок 25, 26 таким образом, что плоскость наклона шайбы 12 совпадает с продольной плоскостью полукольцевых канавок 25, 26. Система дренажа включает трубку 36, связанную с дренажным каналом 37. Ступица 21 мотор-колеса установлена на фланце рычага 38, шарнирно связанного через рычаг 39 с кожухом 40 полуоси правого и левого бортов заднего моста. Рычаг 38 прижимает колесо 2 к опорной поверхности грунта при помощи пружины 41. Конструкция подвески обеспечивает возможность регулировки предварительного сжатия пружины 41,и распределения массы машины на ведущее неуправляемое колесо 1 тяговой машины и дополнительное 2 колесо каждого борта. Также полугусеничный ход обеспечен датчиками частоты вращения ведущих неуправляемых колес 1 тяговой машины и блоком управления (не показаны). Полугусеничный ход работает следующим образом. При движении тяговой машины по грунтовой поверхности с низкой несущей способностью в тяговом режиме автоматически включается насос гидросистемы (не показан),обеспечивающий питание аксиально-поршневых гидромоторов привода дополнительных колес 2. Рабочая жидкость насоса (не показан) поступает через подводящий канал 32,продольный канал 31 цапфы 29, канал 30 в полость кольцевой канавки 28 и оттуда через канал 27 в полость полукольцевой канавки 25, и через каналы 24 в рабочие полости 10 аксиально-поршневых гидромоторов привода дополнительных колес 2 бортов. Под действием рабочей жидкости поршни 8, 9 расходятся, шарики 11 перекатываются по беговым дорожкам наклонных шайб 12, 13, и, поскольку положение шайб 12, 13 фиксировано посредством шлицевых соединений 16, 18, усилия(усилиеравно произведению давления в гидросистеме и диаметра поршня 8, 9- угол наклона шайбы,20) в контакте шарика 11 каждого поршня 8, 9 с шайбой 12, 13 поворачивают блок цилиндров 7 относи 3 68472010.12.30 тельно оси, приводя в движение ступицу 6, и закрепленную на ней пневматическую шину 5,активизируя дополнительное колесо 2 полугусеничного хода каждого борта. Из рабочих полостей 10 жидкость через каналы 24 поступает в полость полукольцевой канавки 26 и через канал 33, кольцевую канавку 34 и канал 35 аксиально-поршневого гидромотора привода дополнительного колеса 2 в бак гидросистемы (не показан). Тяговое усилие передается на остов машины через ведущие неуправляемые колеса 1 тяговой машины и дополнительные 2 колеса. Рассредоточенная передача движущей силы на гусеницы обеспечивает разгрузку гусеничных лент 3, снижает деформацию и препятствует их разрушению. При этом по сигналам датчиков частоты вращения ведущих неуправляемых колес 1 тяговой машины обоих бортов производится регулировка удельных объемов аксиальнопоршневых гидромоторов привода дополнительных колес 2 бортов. Регулировка удельных объемов аксиально-поршневых гидромоторов производится следующим образом. Существует два крайних положения величин удельных объемов. Первое положение - максимальный удельный объем аксиально-поршневого гидромотора обеспечивается при установке шайб 12, 13 с наклоном в разные стороны от центральной поперечной плоскости блока цилиндров 7. В этом положении шайб 12, 13 поршни 8, 9 идут в разные стороны при подаче рабочей жидкости в рабочие полости 10, шесть поршней 8, 9 создают тяговое усилие, а остальные шесть - работают на слив рабочей жидкости. Суммарное усилие, поворачивающее блок цилиндров 7, и момент, реализуемый на ступице 6 максимальные. При этом частота вращения блока цилиндров 7 минимальная,поскольку за один оборот аксиально-поршневого гидромотора все шесть рабочих полостей 10 цилиндров (при шести цилиндрах аксиально-поршневого гидромотора) проходят цикл наполнения и слива рабочей жидкости и формируют удельный объем аксиальнопоршневого гидромотора. Удельный рабочий объем аксиально-поршневого гидромотора равен его конструктивному. Второе крайнее положение - минимальный удельный объем аксиально-поршневого гидромотора обеспечивается при повороте шайбы 13 на 180 и параллельной установке шайб 12, 13. В этом положении шайб 12, 13 поршни 8, 9 идут друг за другом. Объемы рабочих полостей 10 не изменяются. Фактически аксиально-поршневой гидромотор запирается. Удельный объем равен нулю. Такое положение не характерно для аксиальнопоршневого гидромотора и не допускается. Регулировка удельных объемов аксиально-поршневых гидромоторов производится поворотом шайбы 13 относительно оси в диапазоне названных крайних положений. Для увеличения частоты вращения ступицы 6 с колесом 5 включается двигатель 22 (например,шаговый электродвигатель), и червяк 19 начинает вращаться, вращая червячное колесо 17,и поворачивая шайбу 13 при фиксированном положении шайбы 12. При повороте шайбы 13,например на 60, поршни 8, 9 двух цилиндров (четыре поршня) создают тяговое усилие,поршни 8, 9 двух цилиндров (четыре поршня) работают на слив рабочей жидкости, а поршни 8, 9 двух цилиндров движутся в одну сторону, имея постоянные объемы рабочих полостей 10. Удельный рабочий объем аксиально-поршневого гидромотора формируют четыре рабочие полости (вместо шести при максимальном объеме аксиально-поршневого гидромотора). При постоянной подаче рабочей жидкости насоса (не показан) и уменьшении рабочего объема аксиально-поршневого гидромотора частота вращения блока цилиндров 7 и ступицы 6 с пневматическим колесом 5 увеличиваются, при уменьшении реализуемого момента. Для дальнейшего увеличения частоты вращения ступицы 6 с пневматическим колесом 5 включается двигатель 22, и червяк 19 поворачивается, вращая червячное колесо 17, и поворачивая шайбу 13. При повороте шайбы 13, например на 120 от исходного положения,поршни 8, 9 одного цилиндра (два поршня) создают тяговое усилие, поршни 8, 9 одного цилиндра (два поршня) работают на слив рабочей жидкости, а поршни 8, 9 четырех ци 4 68472010.12.30 линдров движутся в одну сторону, имея постоянные объемы рабочих полостей 10. Удельный рабочий объем аксиально-поршневого гидромотора формируют две рабочие полости. При постоянной подаче рабочей жидкости насоса (не показан) и уменьшении удельного рабочего объема аксиально-поршневого гидромотора частота вращения блока цилиндров 7 и ступицы 6 с пневматическим колесом 5 увеличиваются, при уменьшении реализуемого момента. Для движения машины задним ходом рабочая жидкость насоса (не показан) поступает в полости 10 аксиально-поршневых гидромоторов через каналы 35 и сливается в гидросистему через каналы 32. Включаются моторы 22 и шайбы 13 аксиально-поршневых гидромоторов устанавливаются в необходимое положение по сигналам датчиков частоты вращения колес 1 посредством червячных передач 19, 17. Частоты вращения и скорости ведущих неуправляемых колес 1 и дополнительных колес 2 полугусеничных ходов бортов машины согласуются. Утечки рабочей жидкости из зоны высокого давления по трубке 36 и дренажному каналу 37 поступают на слив в бак гидросистемы (не показан). При повороте машины с минимальным радиусом поворота ведущее неуправляемое колесо 1 тяговой машины и дополнительное колесо 2 полугусеничного хода одного борта(отстающего) затормаживаются. Нагрузка остова машины, приходящаяся на задний мост обеспечивается пружинами 41,имеющими регулировку предварительного натяжения. Натяжение гусениц обеспечивается рычагами 39 и пружинами 41. Таким образом, отличительные признаки предлагаемого технического решения обеспечивают передачу тягового усилия с остова тяговой машины на движитель каждого борта ведущим неуправляемым колесом тяговой машины и дополнительным колесом полугусеничного хода, что позволяет рассредоточить усилие, передаваемое на каждую гусеницу, уменьшить нагрузку гусеничной ленты, ее износ и увеличить надежность работы полугусеничного хода. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: B62D 11/00, B62D 55/00
Метки: ход, полугусеничный
Код ссылки
<a href="https://by.patents.su/6-u6847-polugusenichnyjj-hod.html" rel="bookmark" title="База патентов Беларуси">Полугусеничный ход</a>
Полугусеничный ход колесного трактора
Номер патента: U 1483
Опубликовано: 30.09.2004
Авторы: Гирейко Николай Анатольевич, Дутко Леонид Юрьевич, Орда Александр Николаевич
МПК: B62D 55/04
Метки: колесного, ход, полугусеничный, трактора
Текст:
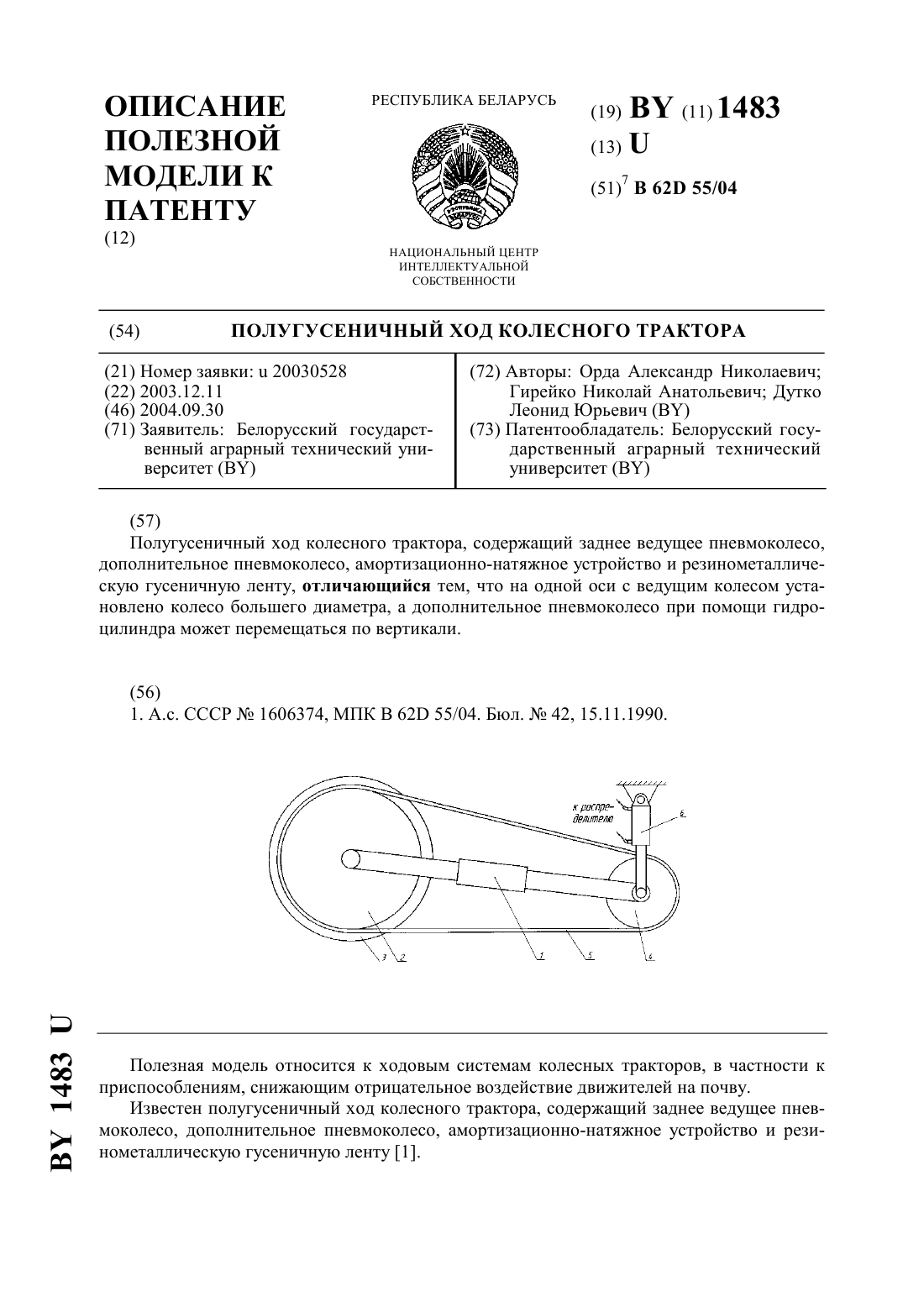
...решает полезная модель, заключается в увеличении срока службы полугусеничного хода и увеличении коэффициента полезного действия ходовой системы при движении по твердой поверхности. Техническая задача решается тем, что в полугусеничном ходе колесного трактора, содержащем заднее ведущее пневмоколесо, дополнительное пневмоколесо, амортизационно-натяжное устройство и резинометаллическую гусеничную ленту, на одной оси с ведущим колесом установлено...
Полугусеничный ход колесного трактора
Номер патента: U 2328
Опубликовано: 30.12.2005
Авторы: Селеши Асфау Белачеу, Шкляревич Виктор Александрович, Зенькович Адам Адамович, Гирейко Николай Анатольевич, Орда Александр Николаевич
МПК: B62D 55/04
Метки: ход, колесного, трактора, полугусеничный
Текст:
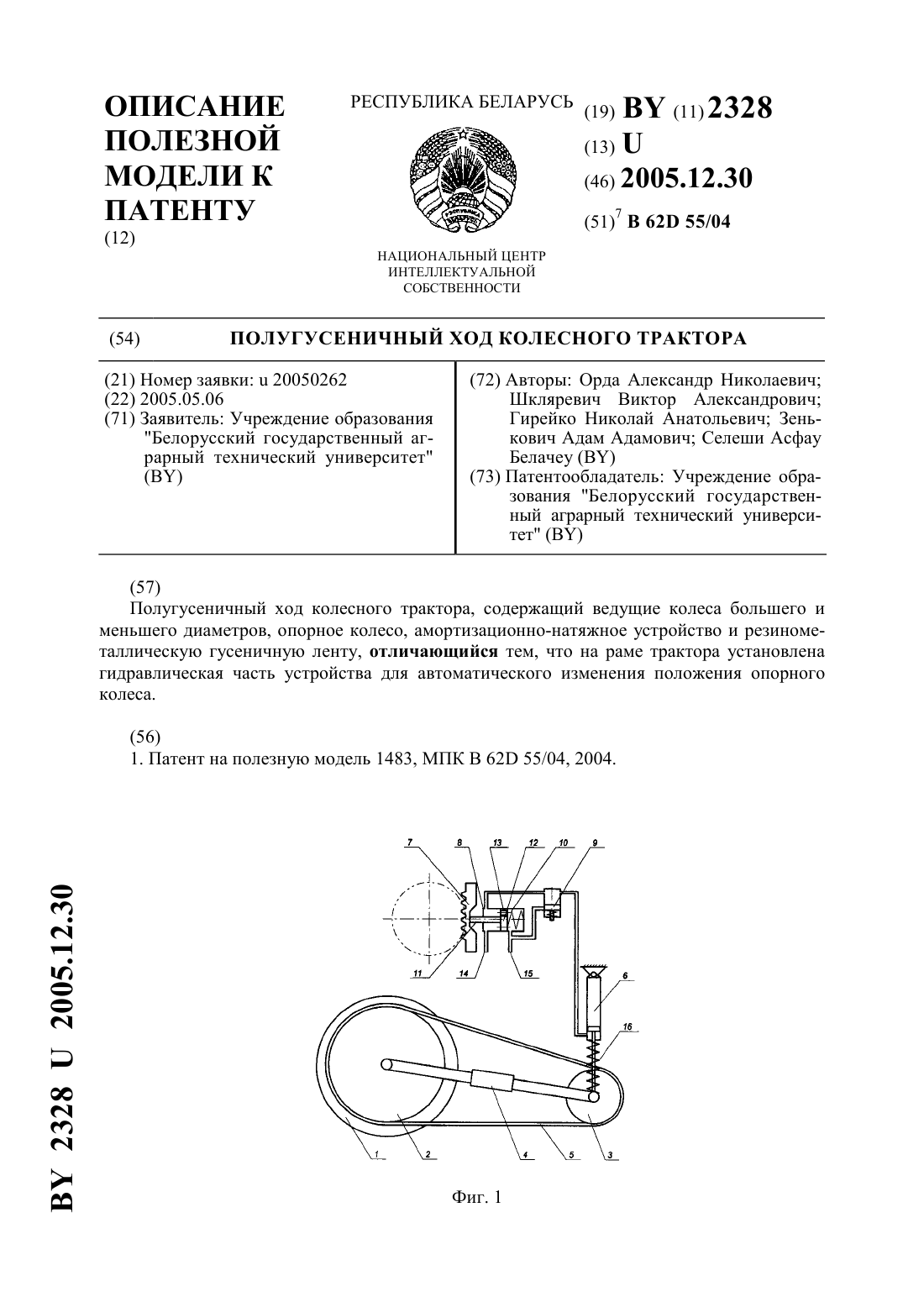
...ведущее колесо 2 и опорное колесо 3. Шток гидроцилиндра одностороннего действия 6 шарнирно соединен с осью опорного колеса 3. Штоковая полость гидроцилиндра 6 связана с гидравлической частью устройства для автоматического изменения положения опорного колеса 3, которая состоит из копира 7, перемещаемого рулевым валом транспортного средства, двухпозиционного распределителя 8 и клапана 9. Двухпозиционный распределитель 8 состоит из пружины...
Полугусеничный ход колесного трактора
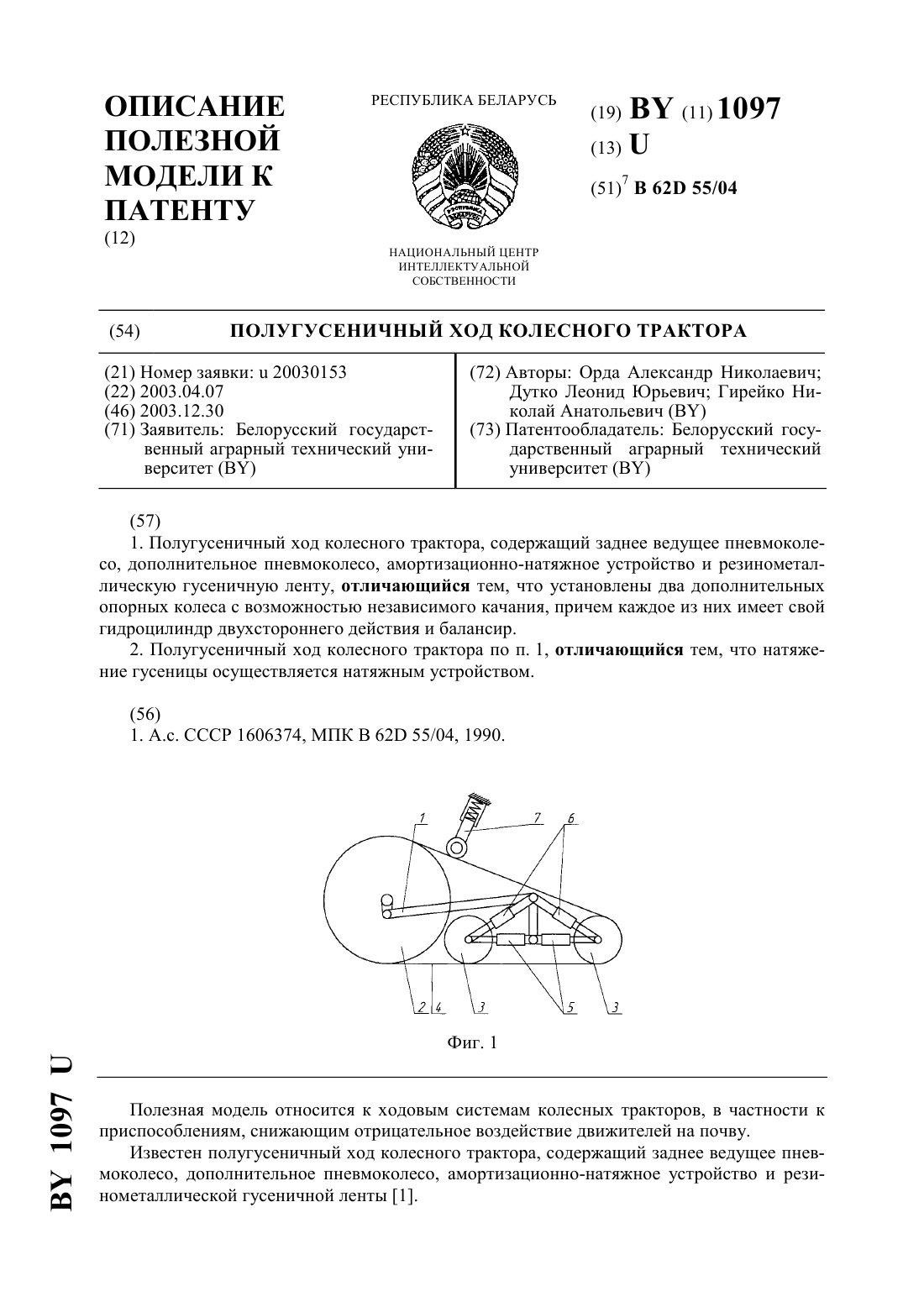
Номер патента: U 1097
Опубликовано: 30.12.2003
Авторы: Дутко Леонид Юрьевич, Гирейко Николай Анатольевич, Орда Александр Николаевич
МПК: B62D 55/04
Метки: трактора, ход, полугусеничный, колесного
Текст:
...а натяжение гусеницы осуществляется натяжным устройством. Полугусеничный ход трактора состоит из рычага 1, прикрепленного к корпусу заднего моста через шарнир, ведущего 2 и двух опорных колес 3, охваченных резинометаллической гусеничной лентой 4. Опорные колеса 3 установлены с возможностью перемещения в горизонтальной плоскости (по ходу движения трактора) под действием гидроцилиндров двухстороннего действия 5 (по одному на каждое...
Мотор-колесо с аксиально-поршневым гидромотором
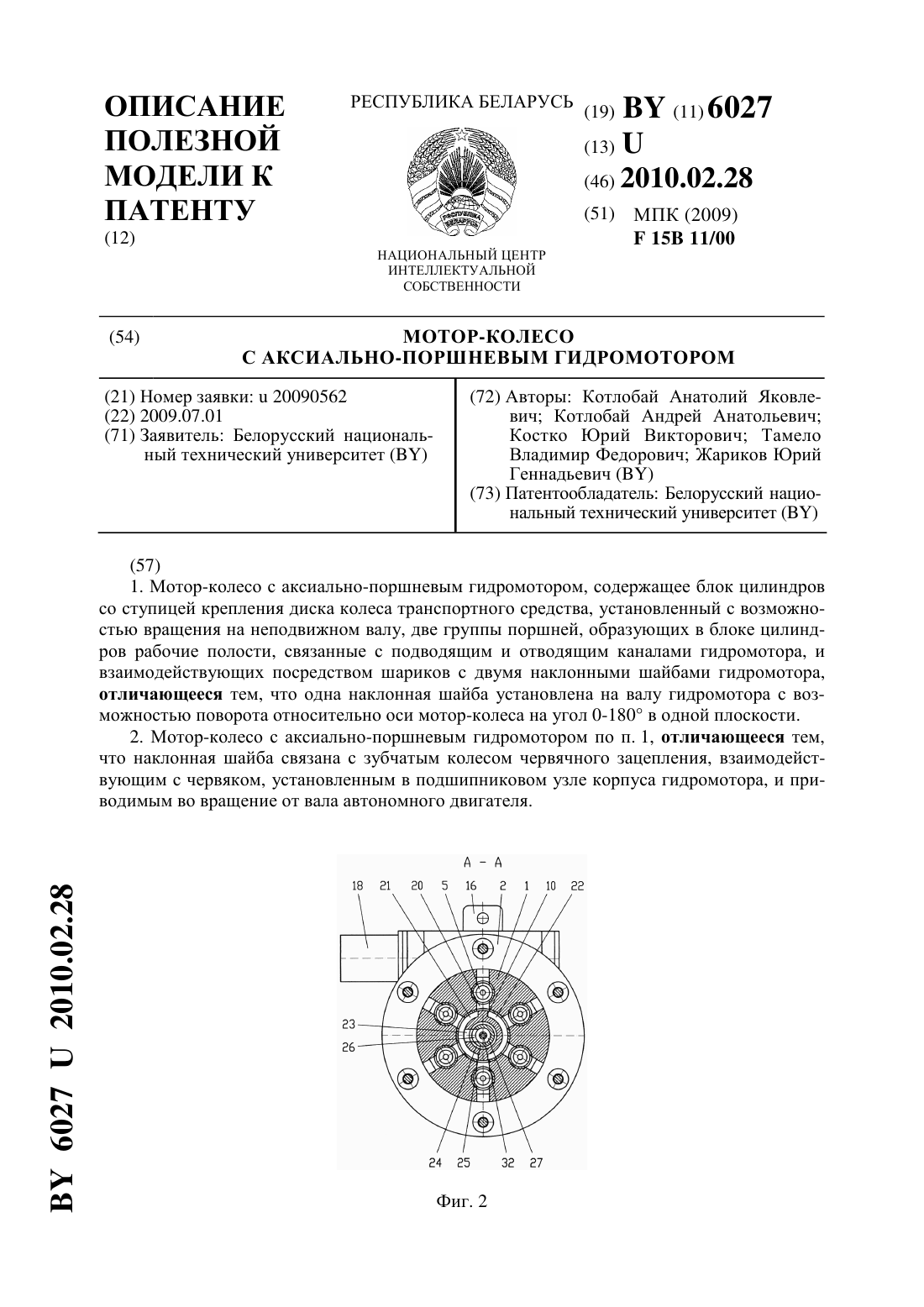
Номер патента: U 6027
Опубликовано: 28.02.2010
Авторы: Котлобай Андрей Анатольевич, Тамело Владимир Федорович, Костко Юрий Викторович, Котлобай Анатолий Яковлевич, Жариков Юрий Геннадьевич
МПК: F15B 11/00
Метки: аксиально-поршневым, гидромотором, мотор-колесо
Текст:
...16 крепления мотор-колеса. Картер червячной передачи закрыт крышкой 17 с уплотнением. Привод червяка 14 осуществляется автономным двигателем 18. Блок цилиндров 1 установлен в подшипниках 19 на посадочных поверхностях шайб 7, 8 с возможностью поворота относительно оси гидромотора. Рабочие полости 5 связаны посредством радиальных каналов 20 с полостями полукольцевых канавок 21, 22, выполненных на поверхности неподвижного вала 10. Каналы 20...
Объемная гидропередача
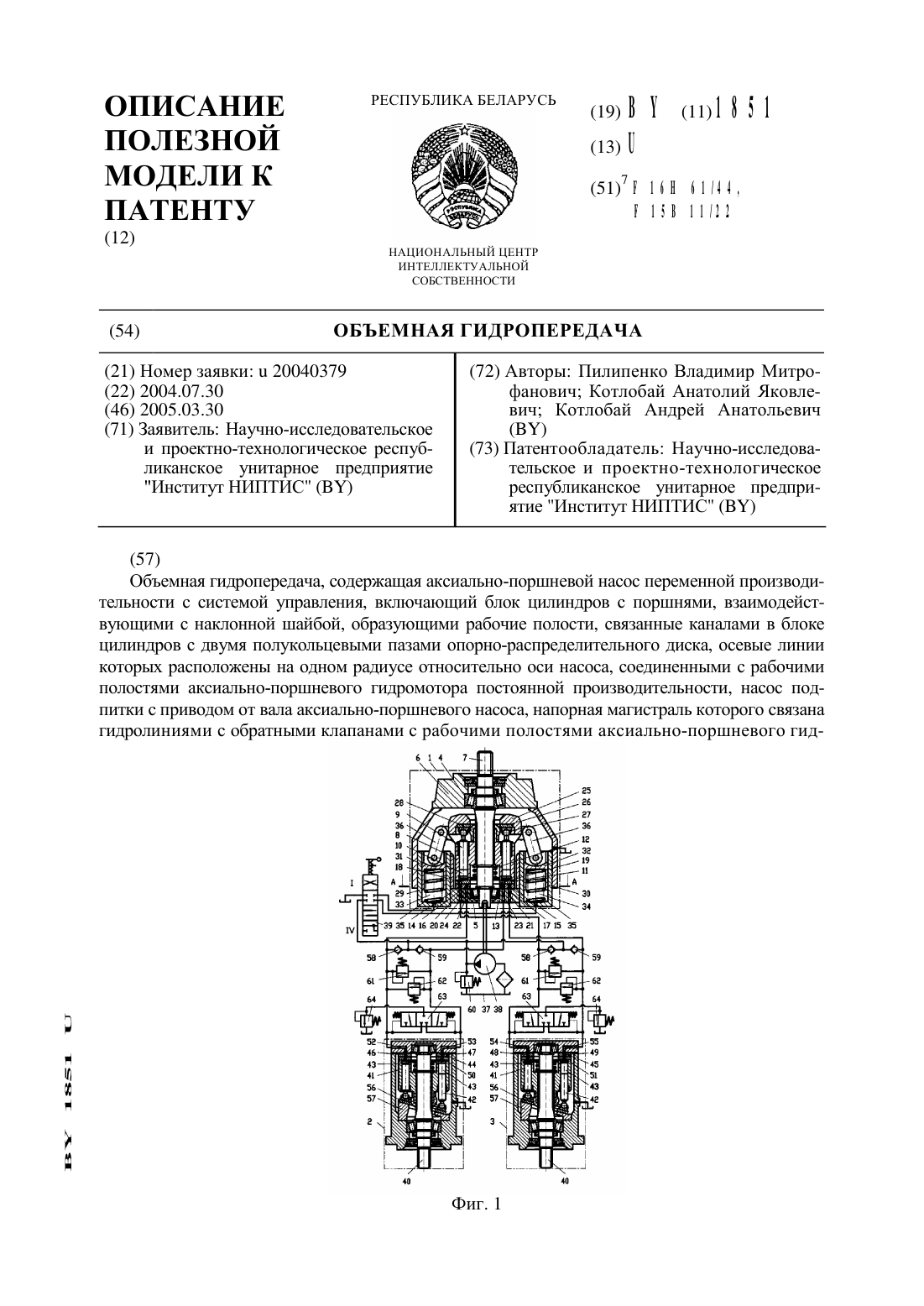
Номер патента: U 1851
Опубликовано: 30.03.2005
Авторы: Пилипенко Владимир Митрофанович, Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: F16H 61/44, F15B 11/22
Метки: гидропередача, объемная
Текст:
...вал 7 и связанный с ним посредством шлицевого соединения блок цилиндров 8. Поршни 9 образуют рабочие полости 10. На торцевой поверхности блока цилиндров 8 укреплен антифрикционный диск 11. Блок цилиндров 8 пружиной 12 и давлением рабочей жидкости прижат к опорно-распределительному диску 13.На опорно-распределительном диске 13 образованы две группы полукольцевых пазов 14, 15 и 16, 17. Полукольцевые пазы каждой группы находятся на одной осевой...
Предыдущий патент: Отопительно-вентиляционная система производственного помещения
Следующий патент: Аксиально-поршневой насос
Случайный патент: Способ отбора силовых кремниевых диодов для космических аппаратов