Автоматическая трансмиссия мобильной машины
Текст
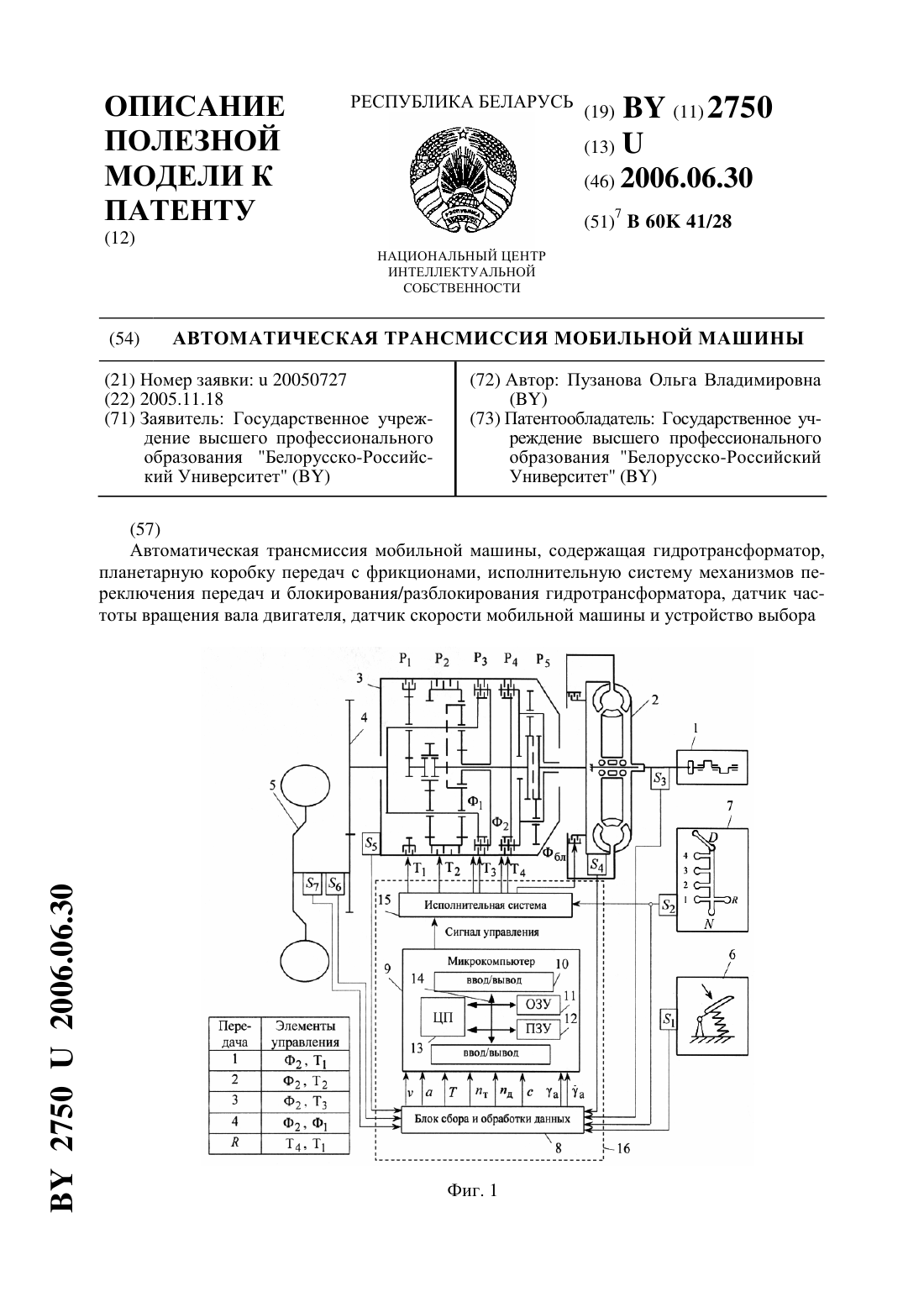
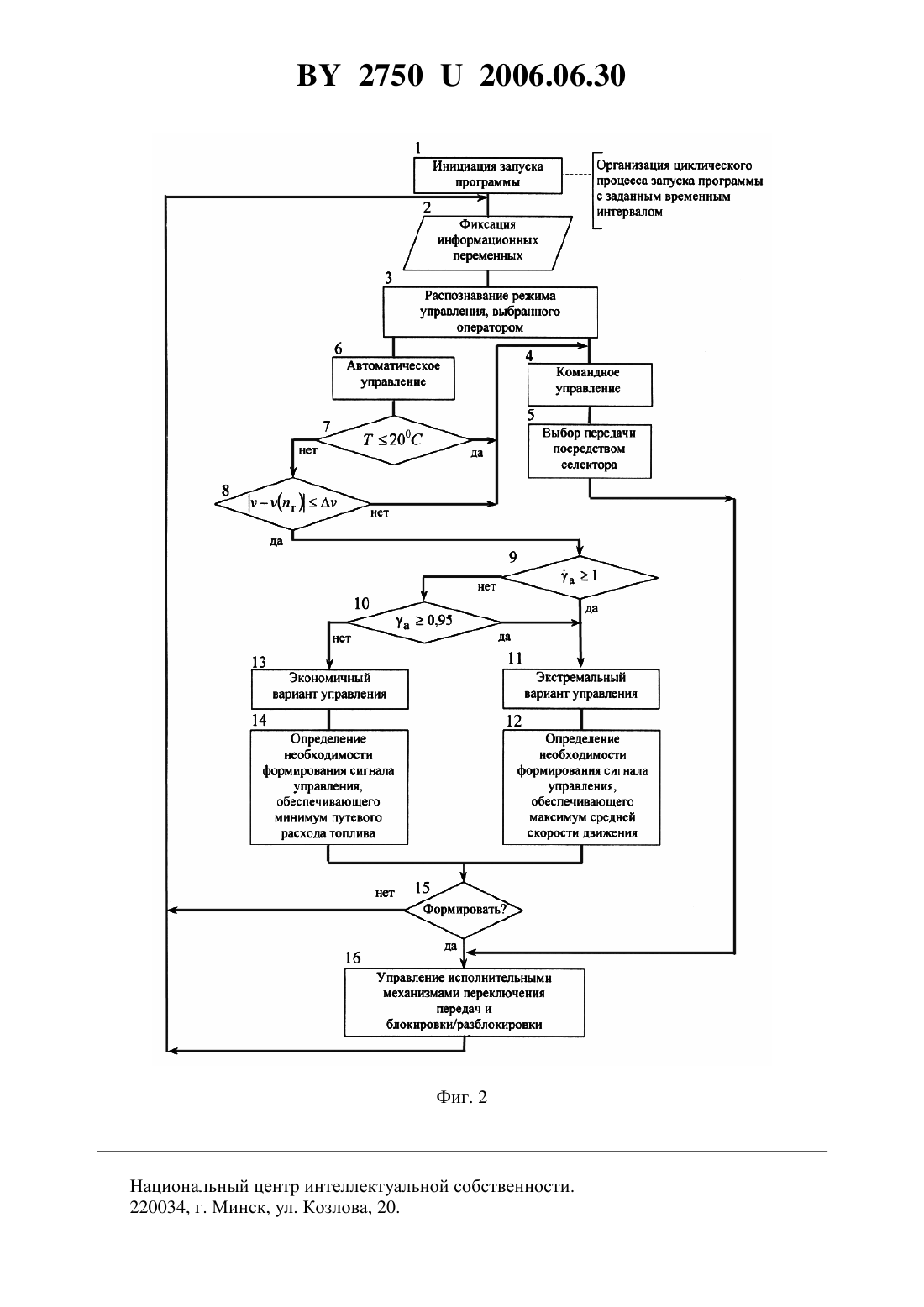
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АВТОМАТИЧЕСКАЯ ТРАНСМИССИЯ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский Университет(72) Автор Пузанова Ольга Владимировна(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский Университет(57) Автоматическая трансмиссия мобильной машины, содержащая гидротрансформатор,планетарную коробку передач с фрикционами, исполнительную систему механизмов переключения передач и блокирования/разблокирования гидротрансформатора, датчик частоты вращения вала двигателя, датчик скорости мобильной машины и устройство выбора 27502006.06.30 режимов и передач с ручным управлением, отличающаяся тем, что снабжена датчиком педали акселератора, определяющим положение педали акселератора и интенсивность перемещения педали акселератора, датчиком ускорения мобильной машины, датчиком частоты вращения турбинного колеса гидротрансформатора, датчиком температуры масла трансмиссии и системой электронного управления, обеспечивающей распознавание режима управления, распознавание требуемого целевого варианта управления, определение моментов переключения передач и блокирования/разблокирования гидротрансформатора для каждого целевого варианта при автоматическом режиме управления согласно информационным переменным - положению педали акселератора и интенсивности ее перемещения, скорости и ускорению мобильной машины, частоте вращения вала двигателя и турбинного колеса гидротрансформатора, температуре масла трансмиссии. Полезная модель относится к транспортной технике, в частности к автоматическим системам управления трансмиссиями. Известна многоступенчатая трансмиссия с блокируемым гидротрансформатором, планетарной коробкой передач, снабженной фрикционными муфтами и тормозами, а также блоком исполнительных механизмов переключения передач и блокирования гидротрансформатора 1. Трансмиссия снабжена командной системой управления, которая позволяет осуществлять включение фрикционов управления при подаче в их цилиндры масла под давлением посредством распределительного устройства с ручным управлением. Оператор мобильной машины с данной трансмиссией вынужден сам формировать характеристики управления на основании своего опыта, квалификации, стиля управления. Смена режимов движения происходит при изменении положения педали акселератора и рычага управления коробкой передач. Такая трансмиссия не может обеспечить стабильного эффективного управления и оперативной смены целевых вариантов управления, в частности, при наступлении экстремальной ситуации. Известна система автоматической трансмиссии, включающая многоступенчатую трансмиссию, датчик частоты вращения вала двигателя, датчик скорости мобильной машины, датчик положения педали акселератора, блок управления и селектор с рычагом ручного управления, обеспечивающий выбор режима управления - командного и/или автоматического 2. В памяти блока управления хранятся характеристики переключения для двух целевых вариантов управления - экономичного и экстремального. При командном режиме управления трансмиссией для смены целевых вариантов управления необходимо использовать, как минимум, два органа управления - рычаг переключения передач и педаль акселератора. В результате неизбежна потеря времени на осуществление управления. Кроме того, не обеспечивается выбор оптимального момента для осуществления управления. При автоматическом режиме управления используются характеристики управления для экономичного варианта управления, а переход к экстремальному управлению также требует времени на осмысление создавшейся ситуации и осуществление воздействия на рычаг. Таким образом, рассмотренные варианты конструкции не обеспечивают своевременной смены характеристик управления, соответствующей требуемому целевому варианту управления, что не позволяет обеспечить эффективную работу мобильной машины в условиях постоянного изменения дорожной ситуации. 27502006.06.30 Задачей полезной модели является создание автоматической трансмиссии мобильной машины, обеспечивающей эффективное и оперативное управление, выражающееся в распознавании требуемого режима управления, целевого варианта автоматического управления и определении для этого варианта моментов переключения передач, блокирования/разблокирования гидротрансформатора с учетом управляющих воздействий оператора. Эта задача решается тем, что автоматическая трансмиссия мобильной машины, содержащая гидротрансформатор, планетарную коробку передач с фрикционами, исполнительную систему механизмов переключения передач и блокирования/разблокирования гидротрансформатора, датчик частоты вращения вала двигателя, датчик скорости мобильной машины и устройство выбора режимов и передач с ручным управлением, согласно полезной модели, снабжена датчиком педали акселератора, определяющим положение педали акселератора и интенсивность перемещения педали акселератора, датчиком ускорения мобильной машины, датчиком частоты вращения турбинного колеса гидротрансформатора,датчиком температуры масла трансмиссии и системой электронного управления, обеспечивающей распознавание режима управления, распознавание требуемого целевого варианта управления, определение моментов переключения передач и блокирования/разблокирования гидротрансформатора для каждого целевого варианта при автоматическом режиме управления согласно информационным переменным - положению педали акселератора и интенсивности ее перемещения, скорости и ускорению мобильной машины, частоте вращения вала двигателя и турбинного колеса гидротрансформатора, температуре масла трансмиссии. Применение предлагаемой автоматической трансмиссии в напряженных условиях движения позволяет облегчить труд оператора, повысить эффективность машины путем оперативного распознавания целевого варианта управления и его реализации путем соответствующего управления переключением передач и блокированием/разблокированием гидротрансформатора, а также повысить безопасность движения. Сущность полезной модели поясняется рисунками. На фиг. 1 изображена структурная схема автоматической трансмиссии мобильной машины на фиг. 2 изображена последовательность действий, производимых системой электронного управления. Согласно фиг. 1, двигатель 1 соединен механической связью с насосным колесом гидротрансформатора 2, имеющего фрикционную муфту блокировки Фбл. Турбинное колесо гидротрансформатора соединено с первичным валом планетарной коробки передач 3. Выходной вал коробки передач связан с ведущими колесами 5 через конечную передачу 4. Коробка передач 3 содержит пять планетарных рядов 1-5 с четырьмя фрикционными тормозами 1-Т 4 и двумя фрикционными муфтами Ф 1 и Ф 2 для переключения передач. Датчики изображены на фиг. 1 прямоугольниками с подписями(индекс- порядковый номер датчика). Датчик 1 педали акселератора 6 предназначен для определения по ложения педали акселератора а и интенсивности ее перемещениядатчик 2 селектора 7 предназначен для распознавания выбранного оператором режима управления с датчик 3 - для определения частоты вращения вала двигателя д датчик 4 - частоты вращения турбинного колеса гидротрансформаторадатчик 5 - температуры масла гидромеханической трансмиссии Т датчик 6 - скоростимобильной машины датчик 7 - ускорения а мобильной машины. Все датчики соединены с блоком сбора и обработки данных 8, а датчик 2 соединен дополнительной связью с исполнительной системой 15. Микрокомпьютер 9, расположенный между блоком сбора и обработки данных 8 и исполнительной системой 15, включает устройство ввода/вывода 10, оперативное запоминающее устройство 11, постоянное запоминающее устройство 12, центральный процессор 13 и каналы передачи данных 14. Исполнительная система 15 соединена гидравлическими магистралями со всеми фрикционными элементами управления гидромеханической передачи Ф 1, Ф 2, 1-4,Фбл. Комбинации включения элементов управления на передачах приведены в таблице на 3 27502006.06.30 фиг. 1. Датчики , блок сбора и обработки данных 8, микрокомпьютер 9, исполнительная система 15 и связи между указанными элементами представляют собой систему электронного управления 16. Автоматическая трансмиссия работает следующим образом. Производится опрос всех датчиков , сигналы которых поступают в блок сбора и обработки данных 8. Результатом его работы являются сигналы о значениях информационных переменных, готовых к использованию в микрокомпьютере. Система учитывает информационные переменные а,, с, д, т, Т,и . Запоминающие устройства 11 и 12 хранят информацию о значениях информационных переменных, параметрах и характеристиках управления. Процессор 13 выполняет комплекс логических и вычислительных процедур. Результатом работы микрокомпьютера является формирование сигнала управления переключением передач, блокированием/разблокированием гидротрансформатора. Исполнительная система 15 реализует сигналы управления путем включения и выключения соответствующих фрикционов. Включение фрикционов происходит при заполнении маслом их цилиндров, а выключение - удалением масла из цилиндров. Инициализация работы системы происходит одновременно с запуском двигателя. Последовательность действий (фиг. 2), производимых системой электронного управления 16(фиг. 1), выполняется циклически с заданным интервалом времени, например, 0,1 с. Этим обеспечивается оперативность реагирования мобильной машины на изменения управляющих воздействий оператора. Фиксация информационных переменных (блок 2, фиг. 2) происходит при обработке сигналов, поступающих от датчиковв блоке 8 (фиг. 1). Блок 3 (фиг. 2) осуществляет распознавание выбранного оператором посредством селектора 7 (фиг. 1) режима управления. Оператор может использовать командный или автоматический режим управления. При командном управлении оператор задает желаемую передачу посредством селектора (блоки 4 и 5, фиг. 2), а управление исполнительными механизмами при переключении передач и блокировании/разблокировании гидротрансформатора производит исполнительная система 15 (фиг. 1), поэтому блок 5 (фиг. 2) связан непосредственно с блоком 16 (фиг. 2). При автоматическом управлении (блок 6, фиг. 2) электронная система 16 (фиг. 1), опираясь на значения зафиксированных информационных переменных, оценивает возможность реализации автоматического управления, определяет целевой вариант управления и организует переключение передач и блокирование/разблокирование гидротрансформатора в оптимальные для данного целевого варианта управления моменты. Вначале оценивается возможность реализации автоматического управления, для этого в блоке 7 (фиг. 2) процессором производится логическая операция оценки температуры масла трансмиссии. Если температура масла Т 20 С, то производится переход к командному режиму. Затем в блоке 8 (фиг. 2) производится логико-вычислительная операция оценки исправности датчика 6 скорости мобильной машиныпутем сравнения его показаний с показаниями датчика 4 частоты вращения турбинного колеса гидротрансформатора , пересчитанной по формуле,30 где- значение передаточного числа на текущей -й передаче- радиус колеса, м- скорость мобильной машины, м/с- показания датчика частоты вращения турбинного колеса гидротрансформатора,об./мин. Если скорость мобильной машиныпо показаниям датчика 6 отличается от скорости мобильной машины, рассчитанной по показаниям датчика 4, более, чем на допустимую величину , то производится переход к командному режиму. Допустимые величины 4 27502006.06.30 погрешности определения скорости мобильной машинына каждой передаче записаны в память микрокомпьютера. Если допустимая величина не превышена, то автоматический режим управления подтверждается и производится оценка целевого варианта управления тягово-скоростными свойствами мобильной машины. Целевой вариант управления определяется по результатам логической работы процес сора, отражаемой блоками 9 и 10 (фиг. 2). При превышенииинтенсивности нажатия педали акселератора, эквивалентной полному перемещению педали акселератора за одну секунду, происходит переход к экстремальному варианту управления (блок 11, фиг. 2) независимо от положения педали акселератора а. Этим достигается оперативность смены целевых вариантов управления, т.е. оперативность реагирования мобильной машины на управляющее воздействия оператора. В случае отсутствия указанного превышения оценивается положение педали акселератора (блок 10, фиг. 2), причем а является безразмерной величиной, изменяемой в диапазоне 0 а 1, где ноль соответствует полностью отпущенной педали, а единица - полному нажатию. Фиксированной границей перехода от экономичного варианта управления к экстремальному является величина а 0,95, зафиксированная датчиком 1. Экономичный вариант управления (блоки 13 и 14, фиг. 2) направлен на экономию расхода топлива и обеспечивает формирование сигнала управления переключением передач и блокированием/разблокированием гидротрансформатора в моменты, определенные из условия минимума путевого расхода топлива. Экстремальный вариант управления (блоки 11 и 12, фиг. 2) обеспечивает интенсивный разгон мобильной машины. Моменты формирования сигнала управления для этого целевого варианта определены из условия получения максимума средней скорости движения. Для любого варианта управления моменты формирования сигнала управления зависят от сочетания информационных переменных а, и а. В случае формирования сигнала управления (блок 15, фиг. 2) на переключение передач вверх контролируется величина ускорениямобильной машины, которая не должна быть отрицательной а 0 (на фиг. 2 не показано). В случае формирования управляющего сигнала (блок 15, фиг. 2) на блокирование гидротрансформатора производится контроль стабильности работы двигателя - частота вращения вала двигателя должна быть не меньше минимальной частоты устойчивой работы двигателя, дд(на фиг. 2 не показано). Реализация сигналов управления переключением передач и блокированием/разблокированием гидротрансформатора организована исполнительной системой 15 (фиг. 1), которая выполняет все необходимые операции включения/выключения фрикционных элементов, соответствующих сигналу управления (блок 16, фиг. 2). Из вышеизложенного следует, что предлагаемая автоматическая трансмиссия мобильной машины позволяет решать поставленную задачу создания автоматической трансмиссии мобильной машины, обеспечивающей эффективное и оперативное управление,выражающееся в распознавании требуемого режима управления, целевого варианта автоматического управления и определении для этого варианта моментов переключения передач, блокирования/разблокирования гидротрансформатора с учетом управляющих воздействий оператора. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60K 41/28
Метки: трансмиссия, машины, автоматическая, мобильной
Код ссылки
<a href="https://by.patents.su/6-u2750-avtomaticheskaya-transmissiya-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Автоматическая трансмиссия мобильной машины</a>
Гдирообъемная трансмиссия самоходной машины
Номер патента: U 1611
Опубликовано: 30.12.2004
Авторы: Котлобай Андрей Анатольевич, Котлобай Анатолий Яковлевич, Леонович Иван Иосифович
МПК: F16H 61/44, F15B 11/22
Метки: самоходной, гдирообъемная, машины, трансмиссия
Текст:
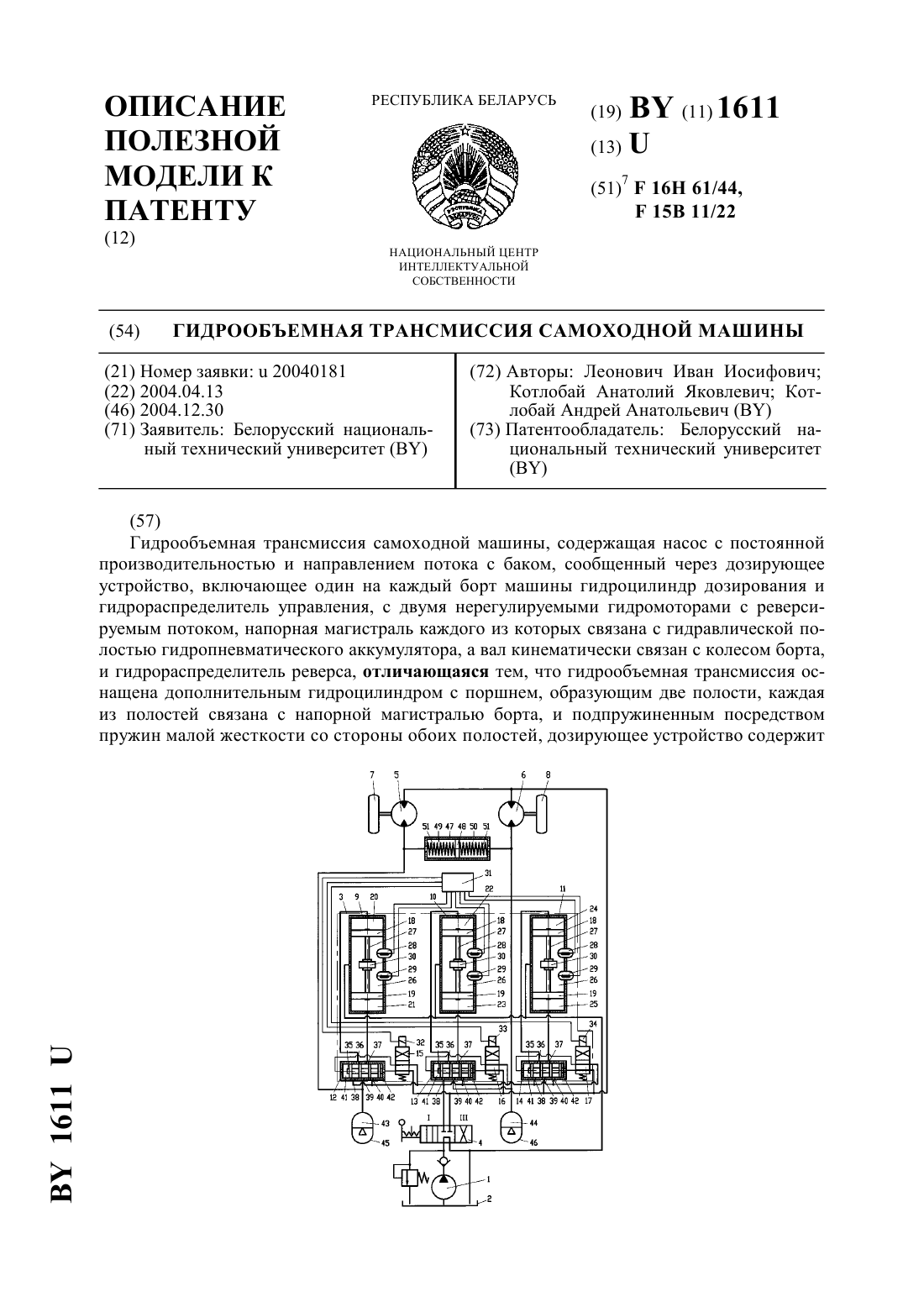
...аккумуляторов 45, 46 и полости 49, 50 гидроцилиндра 47. Перемещается поршень 48 гидроцилиндра 47, выравнивая давление в полостях 49, 50 и 43, 44. В начале движения жидкость поступает в гидравлические полости 43, 44,повышая давления в них до уровня, достаточного для движения машины. Далее, жидкость малыми одинаковыми порциями поступает в напорные магистрали гидромоторов 5, 6, поворачивая колеса 7, 8 на одинаковый угол. Также...
Гидромеханическая трансмиссия транспортного средства
Номер патента: U 650
Опубликовано: 30.09.2002
Авторы: Паненков Анатолий Федосиевич, Бадеев Александр Васильевич, Тондель Андрей Аркадьевич, Одинцов Владимир Викторович
МПК: B60K 17/02
Метки: трансмиссия, средства, транспортного, гидромеханическая
Текст:
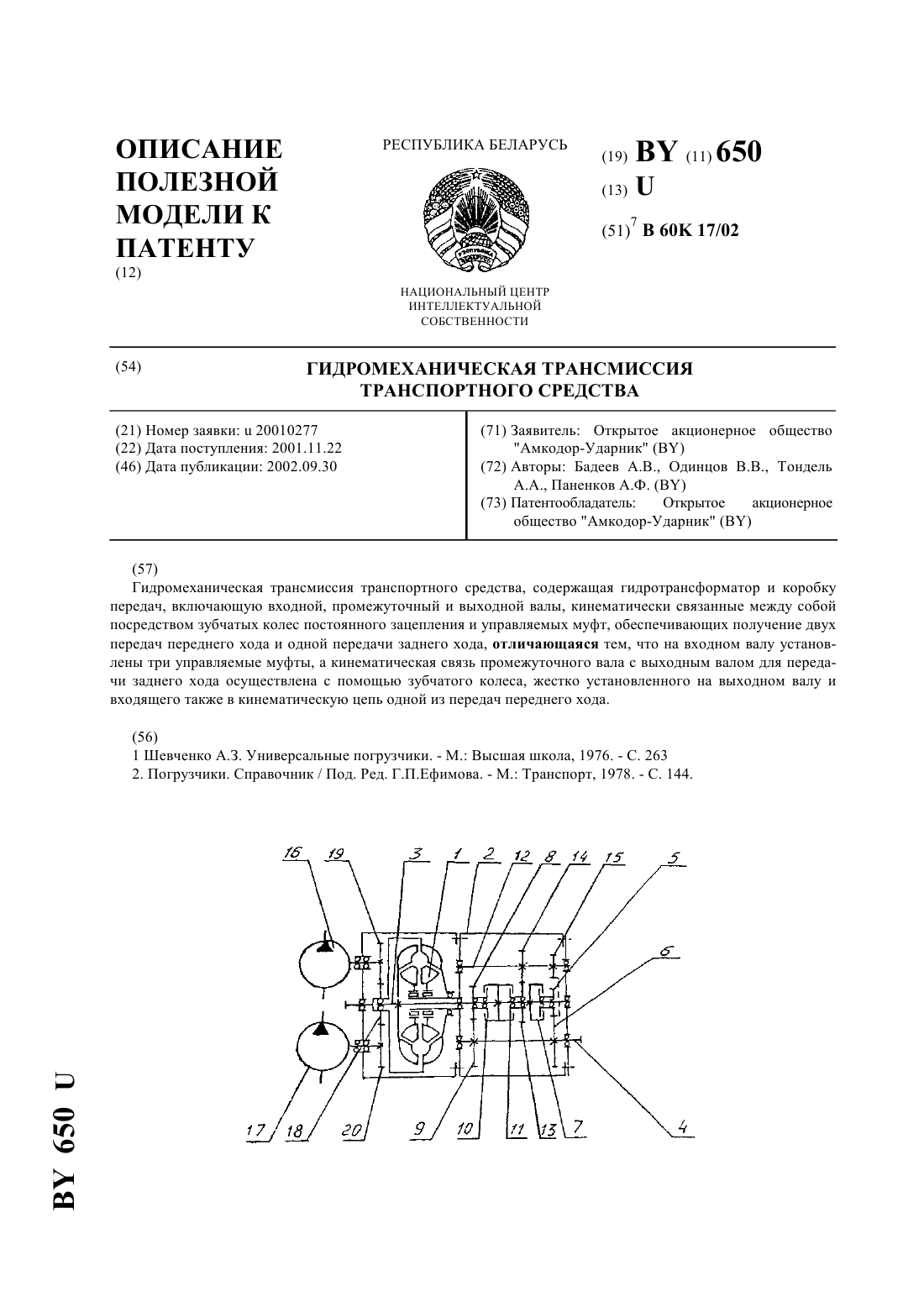
...муфты, причем, согласно техническому решению, на входном валу установлены три управляемые муфты, а кинематическая связь промежуточного вала с выходным валом для передачи заднего хода осуществлена с помощью зубчатого колеса, жестко установленного на выходном валу и также входящего в кинематическую цепь передачи переднего хода. Такое выполнение гидромеханической трансмиссии позволяет передавать мощность от входного вала на выходной при...
Гидрообъемная трансмиссия самоходной полноприводной машины
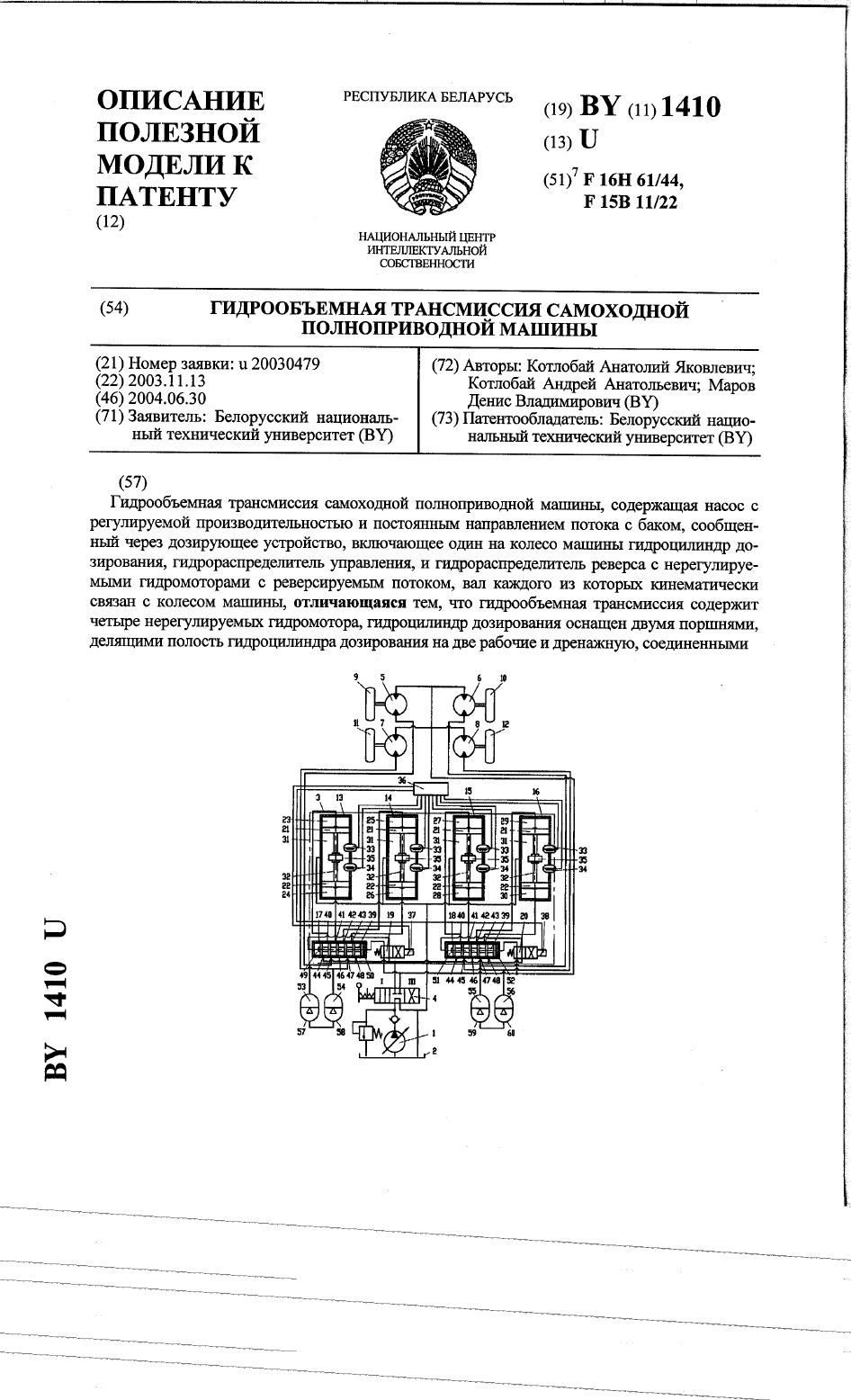
Номер патента: U 1410
Опубликовано: 30.06.2004
Авторы: Маров Денис Владимирович, Котлобай Анатолий Яковлевич, Котлобай Андрей Анатольевич
МПК: F15B 11/22, F16H 61/44
Метки: трансмиссия, самоходной, гидрообъемная, машины, полноприводной
Текст:
...расширение функциональныхвозможностей гидрообъемной трансмиссии. Связь пневматических полостей гидропневматических аккумуляторов борта обеспечивает одновременность подачи рабочей жидкости по напорным магистралям гидравлических моторов борта, рационально распределяет крутящие моменты по колесам борта. Замена гидравдшческой системы управления гидрораспределштелями управления электронной позволит уменьшить массово-габаритные...
Система измерения объема топлива в баке мобильной машины

Номер патента: U 2315
Опубликовано: 30.12.2005
Авторы: Худолей Андрей Леонидович, Гриценко Вячеслав Александрович
МПК: G01F 23/16
Метки: баке, топлива, система, измерения, объема, машины, мобильной
Текст:
...величина допускаемых деформаций тензодатчика должна быть больше, чем у материала эластичной мембраны. Все это связано с трудоемким подбором материалов и на практике сложно осуществимо. Кроме того, устройство не учитывает изменения плотности жидкой среды от температуры. 23152005.12.30 Задачей предлагаемой полезной модели является повышение точности и надежности измерения объема топлива в баке мобильной машины, обеспечение возможности проведения...
Гидрообъемная трансмиссия самоходной машины
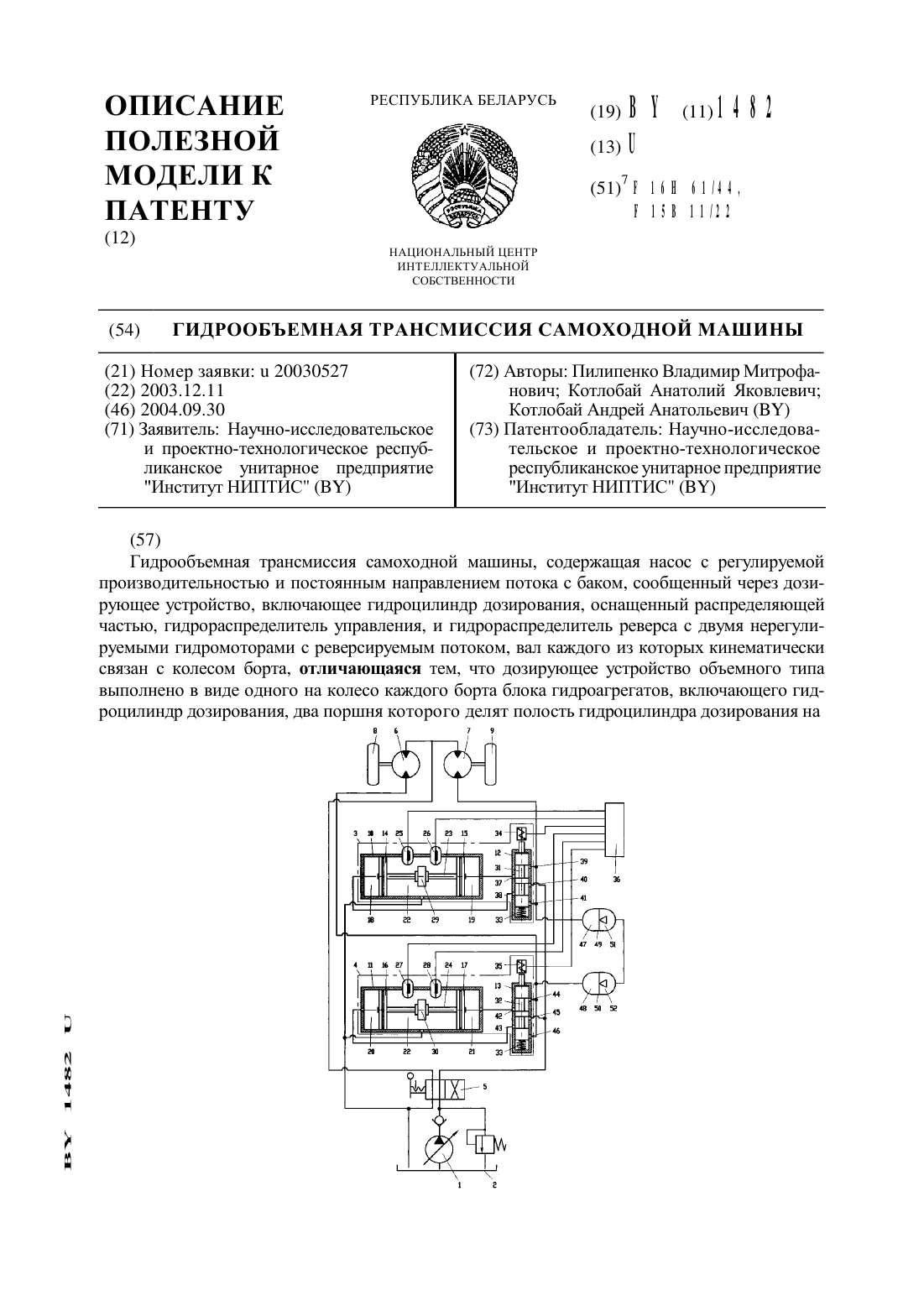
Номер патента: U 1482
Опубликовано: 30.09.2004
Авторы: Котлобай Андрей Анатольевич, Пилипенко Владимир Митрофанович, Котлобай Анатолий Яковлевич
МПК: F16H 61/44, F15B 11/22
Метки: гидрообъемная, трансмиссия, машины, самоходной
Текст:
...одновременность подачи рабочей жидкости по напорным магистралям гидравлических моторов бортов, что улучшает курсовую устойчивость самоходной машины. Кроме того, применение двух блоков гидроагрегатов с электронной системойуправления позволяет исключить из гидросистемы гидрораспределитель поворота и обеспечить любой режим поворота мащины.На чертеже представлена гидравлическая схема гидрообъемной трансмиссии самоходной...
Предыдущий патент: Устройство для определения разности потенциалов в полости рта
Следующий патент: Устройство для автоматической промывки верхней части молокосборника
Случайный патент: Дистанционный хирургический измеритель