Микроэлектромеханический актюатор
Номер патента: 7919
Опубликовано: 30.04.2006
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
Текст
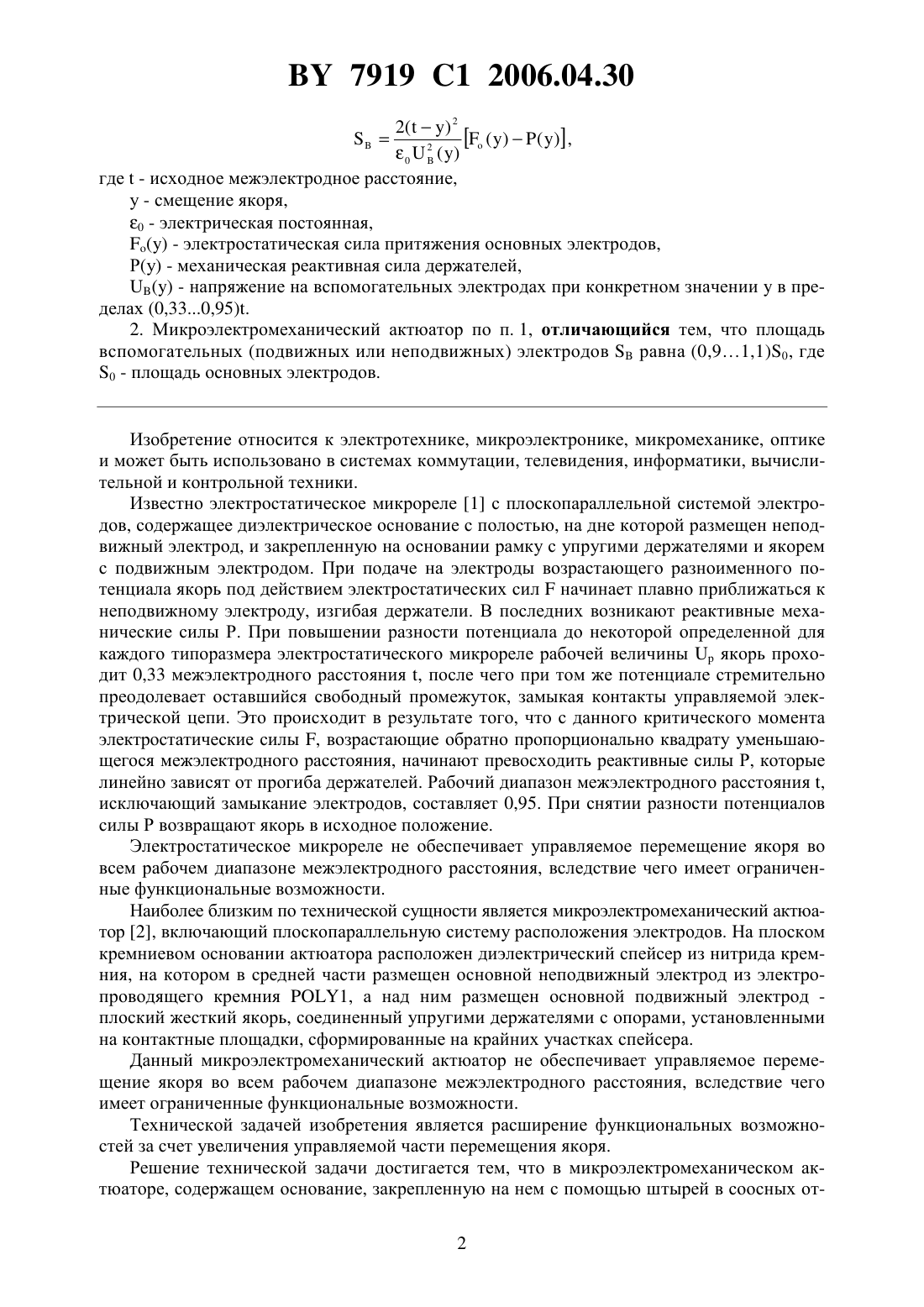
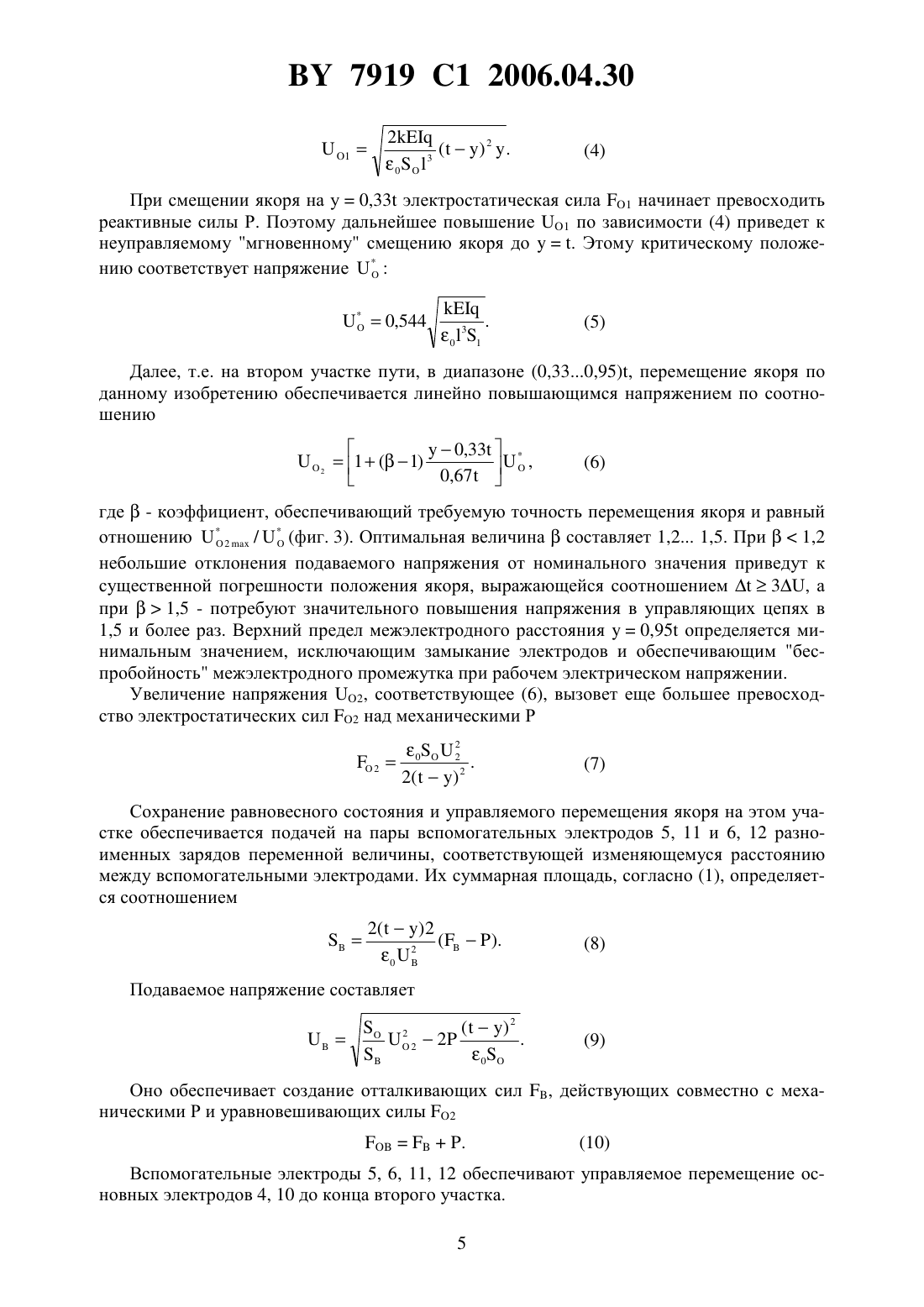
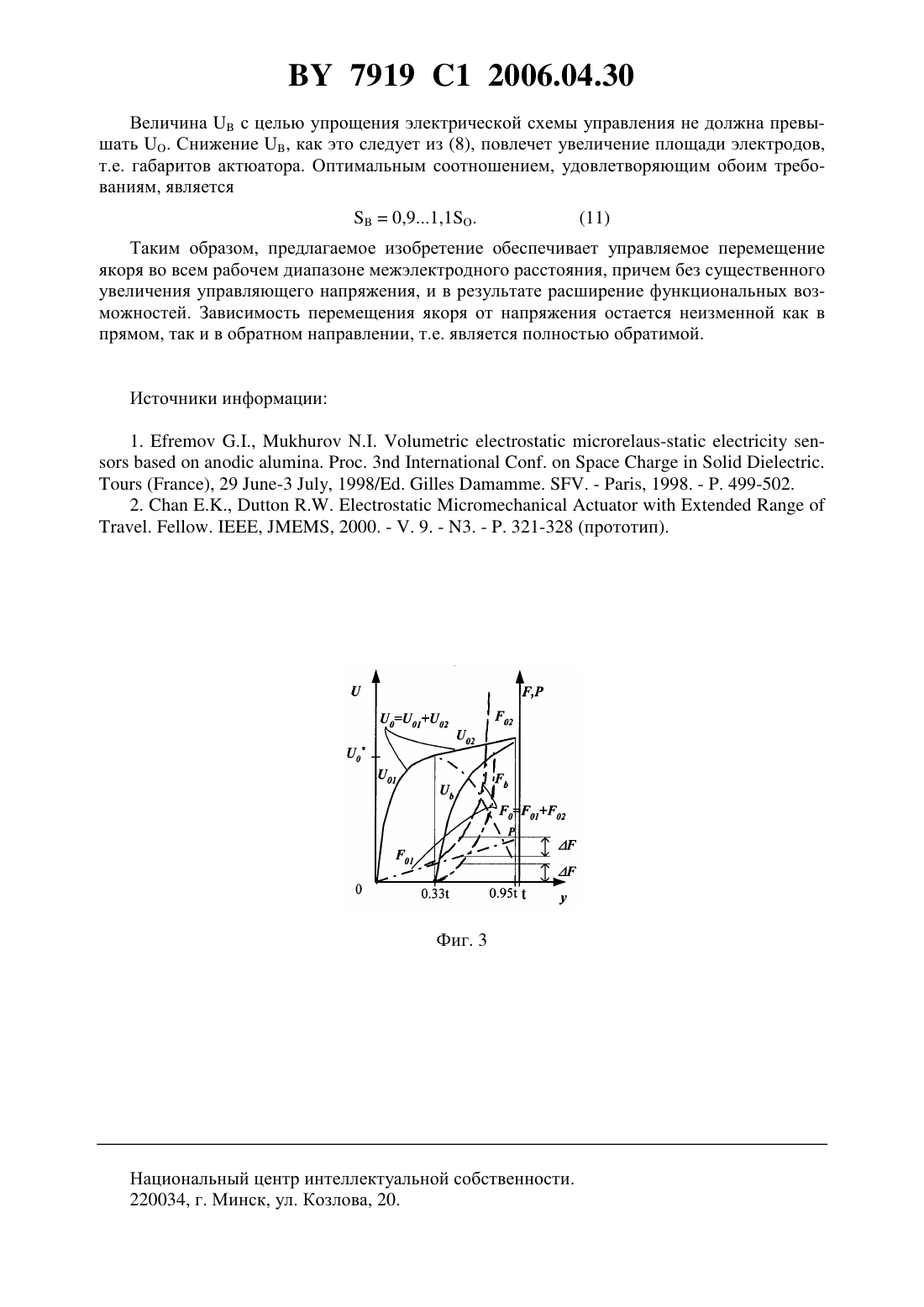
(51)01 59/00 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научное учреждение Институт электроники Национальной академии наук Беларуси(72) Авторы Мухуров Николай Иванович Ефремов Георгий Игнатьевич(73) Патентообладатель Государственное научное учреждение Институт электроники Национальной академии наук Беларуси(57) 1. Микроэлектромеханический актюатор, содержащий основание, закрепленную на нем с помощью штырей в соосных отверстиях пластину с рамкой, упругими держателями и жестким якорем, установленными параллельно основанию, основные неподвижный и подвижный электроды, выполненные на основании и якоре соответственно, вспомогательные электроды, контактные площадки и дорожки, отличающийся тем, что основание и пластина выполнены из диэлектрика, на внутренней стороне основания, обращенной к якорю, выполнена полость, глубина которой равна межэлектродному расстоянию, и на дне которой в средней части выполнен основной неподвижный электрод, симметрично относительно одной из его осей выполнены два вспомогательных неподвижных электрода,равных между собой по площади, а на обращенной к основанию стороне якоря над соответствующими неподвижными электродами выполнены основной и два вспомогательных подвижных электрода, при этом суммарная площадь двух вспомогательных (подвижных или неподвижных) электродовопределяется соотношением где- исходное межэлектродное расстояние,у - смещение якоря,0 - электрическая постоянная, - электростатическая сила притяжения основных электродов,Р(у) - механическая реактивная сила держателей, - напряжение на вспомогательных электродах при конкретном значениив пределах (0,330,95). 2. Микроэлектромеханический актюатор по п. 1, отличающийся тем, что площадь вспомогательных (подвижных или неподвижных) электродовравна (0,91,1)0, где 0 - площадь основных электродов. Изобретение относится к электротехнике, микроэлектронике, микромеханике, оптике и может быть использовано в системах коммутации, телевидения, информатики, вычислительной и контрольной техники. Известно электростатическое микрореле 1 с плоскопараллельной системой электродов, содержащее диэлектрическое основание с полостью, на дне которой размещен неподвижный электрод, и закрепленную на основании рамку с упругими держателями и якорем с подвижным электродом. При подаче на электроды возрастающего разноименного потенциала якорь под действием электростатических силначинает плавно приближаться к неподвижному электроду, изгибая держатели. В последних возникают реактивные механические силы Р. При повышении разности потенциала до некоторой определенной для каждого типоразмера электростатического микрореле рабочей величиныякорь проходит 0,33 межэлектродного расстояния , после чего при том же потенциале стремительно преодолевает оставшийся свободный промежуток, замыкая контакты управляемой электрической цепи. Это происходит в результате того, что с данного критического момента электростатические силы , возрастающие обратно пропорционально квадрату уменьшающегося межэлектродного расстояния, начинают превосходить реактивные силы Р, которые линейно зависят от прогиба держателей. Рабочий диапазон межэлектродного расстояния ,исключающий замыкание электродов, составляет 0,95. При снятии разности потенциалов силы Р возвращают якорь в исходное положение. Электростатическое микрореле не обеспечивает управляемое перемещение якоря во всем рабочем диапазоне межэлектродного расстояния, вследствие чего имеет ограниченные функциональные возможности. Наиболее близким по технической сущности является микроэлектромеханический актюатор 2, включающий плоскопараллельную систему расположения электродов. На плоском кремниевом основании актюатора расположен диэлектрический спейсер из нитрида кремния, на котором в средней части размещен основной неподвижный электрод из электропроводящего кремния 1, а над ним размещен основной подвижный электрод плоский жесткий якорь, соединенный упругими держателями с опорами, установленными на контактные площадки, сформированные на крайних участках спейсера. Данный микроэлектромеханический актюатор не обеспечивает управляемое перемещение якоря во всем рабочем диапазоне межэлектродного расстояния, вследствие чего имеет ограниченные функциональные возможности. Технической задачей изобретения является расширение функциональных возможностей за счет увеличения управляемой части перемещения якоря. Решение технической задачи достигается тем, что в микроэлектромеханическом актюаторе, содержащем основание, закрепленную на нем с помощью штырей в соосных от 2 7919 1 2006.04.30 верстиях пластину с рамкой, упругими держателями и жестким якорем, установленными параллельно основанию, основные неподвижный и подвижный электроды, выполненные на основании и якоре соответственно, вспомогательные электроды, контактные площадки и дорожки, основание и пластина выполнены из диэлектрика, на внутренней стороне основания, обращенной к якорю, выполнена полость, глубина которой равна межэлектродному расстоянию и на дне которой в средней части выполнен основной неподвижный электрод, симметрично относительно одной из его осей выполнены два вспомогательных неподвижных электрода, равных между собой по площади, а на обращенной к основанию стороне якоря над соответствующими неподвижными электродами выполнены основной и два вспомогательных подвижных электрода, при этом суммарная площадь двух вспомогательных (подвижных или неподвижных) электродовопределяется соотношением где- исходное межэлектродное расстояние,у - смещение якоря,0 - электрическая постоянная,О - электростатическая сила притяжения основных электродов,Р(у) - механическая реактивная сила держателей,(у) - напряжение на вспомогательных электродах при конкретном значении у в пределах (0,330,95),при этом площадь вспомогательных (подвижных или неподвижных) электродовравна (0,9 1,1) , где- площадь основных электродов. Совокупность указанных признаков исключает перекос якоря, который может спровоцировать неуправляемое перемещение якоря, и обеспечивает расширение функциональных возможностей за счет увеличения управляемой части перемещения якоря до 0,95. Сущность изобретения поясняется фиг. 1, 2, 3. На фиг. 1 представлено поперечное сечение микроэлектромеханического актюатора,на котором 1 - основание,2 - пластина,3 - полость,4 - основной неподвижный электрод,5, 6- вспомогательные неподвижные электроды,7 - рамка,8 - держатель,9 - якорь,10 - основной подвижный электрод,11, 12 - вспомогательные подвижные электроды,13 - отверстие,14 - контактная площадка,15 - контактная дорожка,16 - штырек. На фиг. 2 представлен вид сверху на микроэлектромеханический актюатор и часть основания с неподвижными электродами. На фиг. 3 приведена схема изменения напряжений и электромеханических сил в процессе срабатывания микроэлектромеханического актюатора, на которой для удобства сопоставления активные и реактивные силы отложены в одном направлении и на которой- напряжение, подаваемое на основные электроды,1 - напряжение, подаваемое на основные электроды на первом участке пути якоря при 0,33,3 7919 1 2006.04.30 2 - напряжение, подаваемое на основные электроды на втором участке пути якоря при 0,33, - напряжение, подаваемое на вспомогательные электроды,1 - электростатическая сила притяжения основных электродов на первом участке пути,2 - электростатическая сила притяжения основных электродов на втором участке пути, - электростатическая сила отталкивания вспомогательных электродов,Р - механическая реактивная сила держателей,- разность электростатических сил притяжения и механических реактивных сил на втором участке пути. Микроэлектромеханический актюатор (фиг. 1, 2) содержит диэлектрические основание 1 и закрепленную на нем пластину 2. В основании 1 выполнена полость 3 глубиной,равной межэлектродному расстоянию , на дне которой в средней части расположены основной неподвижный электрод 4 и два вспомогательных неподвижных электрода 5 и 6,симметричных относительно одной из осей основного неподвижного электрода 4 и равных между собой по площади. В пластине 2 сформированы рамка 7, упругие держатели 8 и жесткий якорь 9. На внутренней стороне якоря 9, обращенной к основанию, нанесены основной подвижный электрод 10 и два вспомогательных подвижных электрода 11 и 12,расположенные над соответствующими неподвижными электродами 4, 5, 6, размещенными на дне полости 3. По периферии основания 1 и пластины 2 предусмотрены соосные отверстия 13, вокруг которых сформированы контактные площадки 14, соединенные контактными дорожками 15 с соответствующими электродами. В отверстия 13 вставлены штырьки 16, которые соединяют основание 1 и пластину 2 и являются выводами, подключающими электроды к внешним источникам питания. Основание 1 и пластина 2 могут быть выполнены из анодного оксида алюминия, который обладает высокими электромеханическими свойствами, а технология получения деталей,основанная на интегральных методах формирования контуров и полостей с микронной точностью, обеспечивает прецизионность геометрии диэлектрических элементов. Электроды 4, 6, 10, 11, 12, контактные дорожки 15, контактные площадки 13 выполняются из тонких пленок металлов, близких по коэффициенту термического расширенияк диэлектрику, т.е. имеющих (610)10-6 град-1 (, Мо, ), что обеспечивает снижение внутренних механических напряжений, искажающих геометрию деталей. Они формируются путем вакуумного или плазменного напыления. Соединение штырьков 16 с основанием 1 и пластиной 2 осуществляется низкотемпературной пайкой или токопроводящими клеями. Микроэлектромеханический актюатор работает следующим образом. При подаче разности потенциаловна основные электроды 4, 10 между ними возникает электростатическая притягивающая сила(фиг. 3)202 .(1) 2 Смещение якоря 9 сопровождается прогибом держателей 8 и появлением в них реактивной механической силы Р где Е - модуль упругости материала держателей 8,- момент инерции сечения держателя 8, - длина держателя 8,- количество держателей 8,- коэффициент заделки концов держателя 8. Вначале при увеличении напряжения на первом участке пути 1 электростатическая сила 1 уравновешивается реактивными силами Р 1 Р При смещении якоря на у 0,33 электростатическая сила 1 начинает превосходить реактивные силы Р. Поэтому дальнейшее повышение 1 по зависимости (4) приведет к неуправляемому мгновенному смещению якоря до. Этому критическому положению соответствует напряжение Далее, т.е. на втором участке пути, в диапазоне (0,330,95), перемещение якоря по данному изобретению обеспечивается линейно повышающимся напряжением по соотношению где- коэффициент, обеспечивающий требуемую точность перемещения якоря и равный отношению 2/(фиг. 3). Оптимальная величинасоставляет 1,2 1,5. При 1,2 небольшие отклонения подаваемого напряжения от номинального значения приведут к существенной погрешности положения якоря, выражающейся соотношением 3, а при 1,5 - потребуют значительного повышения напряжения в управляющих цепях в 1,5 и более раз. Верхний предел межэлектродного расстояния 0,95 определяется минимальным значением, исключающим замыкание электродов и обеспечивающим беспробойность межэлектродного промежутка при рабочем электрическом напряжении. Увеличение напряжения 2, соответствующее (6), вызовет еще большее превосходство электростатических сил 2 над механическими Р Сохранение равновесного состояния и управляемого перемещения якоря на этом участке обеспечивается подачей на пары вспомогательных электродов 5, 11 и 6, 12 разноименных зарядов переменной величины, соответствующей изменяющемуся расстоянию между вспомогательными электродами. Их суммарная площадь, согласно (1), определяется соотношением Оно обеспечивает создание отталкивающих сил , действующих совместно с механическими Р и уравновешивающих силы 2 Вспомогательные электроды 5, 6, 11, 12 обеспечивают управляемое перемещение основных электродов 4, 10 до конца второго участка. 5 7919 1 2006.04.30 Величинас целью упрощения электрической схемы управления не должна превышать . Снижение , как это следует из (8), повлечет увеличение площади электродов,т.е. габаритов актюатора. Оптимальным соотношением, удовлетворяющим обоим требованиям, является Таким образом, предлагаемое изобретение обеспечивает управляемое перемещение якоря во всем рабочем диапазоне межэлектродного расстояния, причем без существенного увеличения управляющего напряжения, и в результате расширение функциональных возможностей. Зависимость перемещения якоря от напряжения остается неизменной как в прямом, так и в обратном направлении, т.е. является полностью обратимой. Источники информации Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H01H 59/00
Метки: микроэлектромеханический, актюатор
Код ссылки
<a href="https://by.patents.su/6-7919-mikroelektromehanicheskijj-aktyuator.html" rel="bookmark" title="База патентов Беларуси">Микроэлектромеханический актюатор</a>
Микроэлектромеханический оптический переключатель
Номер патента: 7462
Опубликовано: 30.12.2005
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: оптический, микроэлектромеханический, переключатель
Текст:
...соответственно первой и второй пар управляющих электродов и межэлектродные расстояния 1, 2 связаны соотношениями 222(1) 1 11 Совокупность указанных признаков обеспечивает повышение точности пространственного позиционирования оптических лучей микроэлектромеханическими оптическими переключателями. Сущность изобретения поясняется фиг. 1, 2. На фиг. 1 представлено поперечное сечение микромеханического оптического переключателя, на котором 1 -...
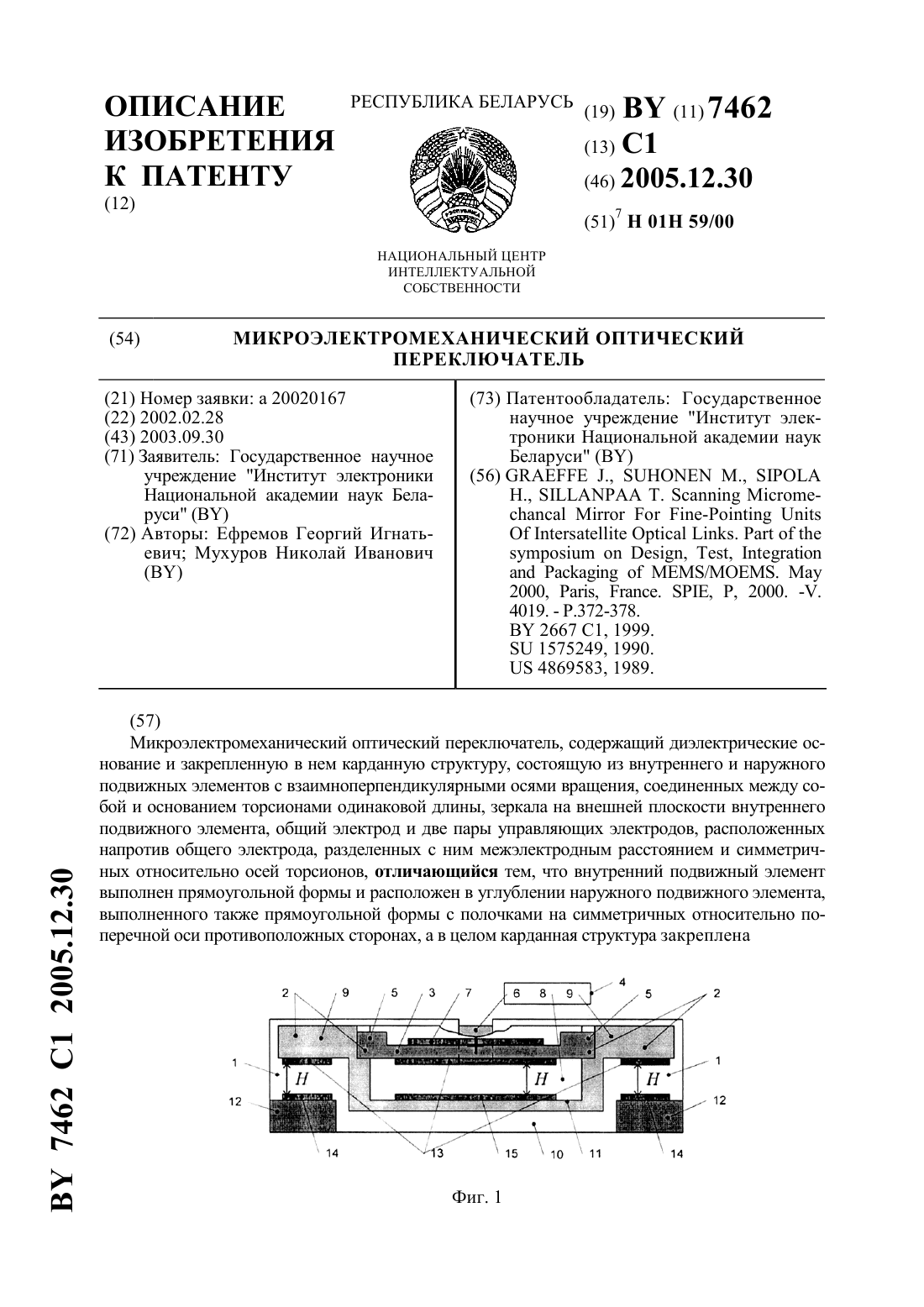
Электростатическое регулируемое микрореле
Номер патента: 5412
Опубликовано: 30.09.2003
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: электростатическое, микрореле, регулируемое
Текст:
...3 5412 1 при любых значениях электрического напряжения в диапазоне (0,032,80)и при минимальной разности напряжения включения и выключения микрореле, что существенно расширяет его функциональные возможности. Эти качества электростатического регулируемого микрореле особенно важны в устройствах, предназначенных для оптимизации параметров рабочих процессов, их корректировки и стабилизации, переключении режимов и т.п. Сущность изобретения...
Оптический микросканер
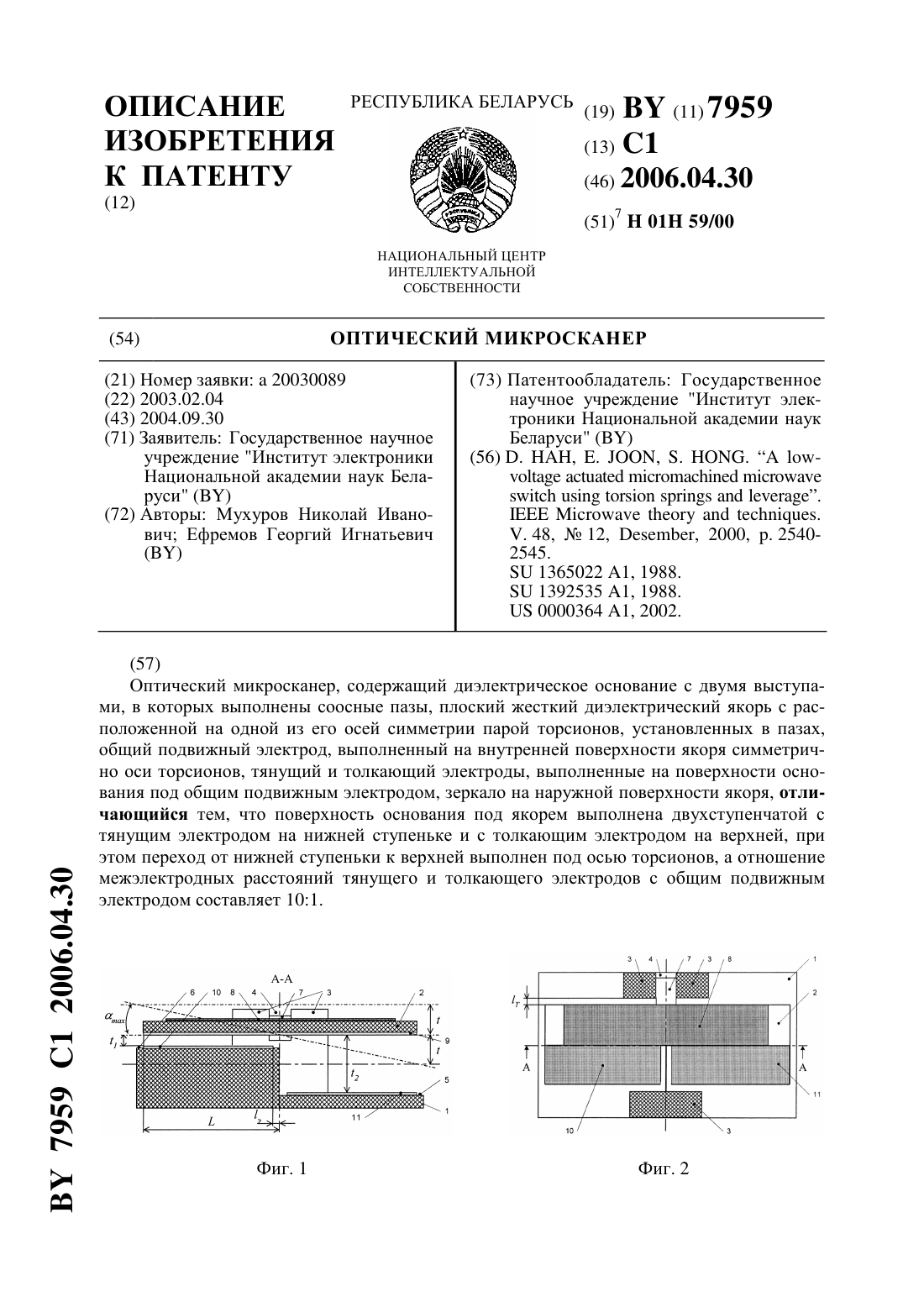
Номер патента: 7959
Опубликовано: 30.04.2006
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: микросканер, оптический
Текст:
...микросканер и основание 1. На фиг. 3 представлены кривые взаимосвязи напряжения / и относительного угла поворота якоряи их погрешностей. Кривая 1 - зависимость / при включении только толкающей пары электродов 10,2 кривая 2 - зависимость / при включении только тянущей пары электродов 22 кривая 3 - зависимость / при включении обеих пар электродов 10,2, 22 кривая 4 - зависимость / при включении только тянущей пары электродов 21,5 кривая 5...
Планарное электростатическое микрореле (варианты)
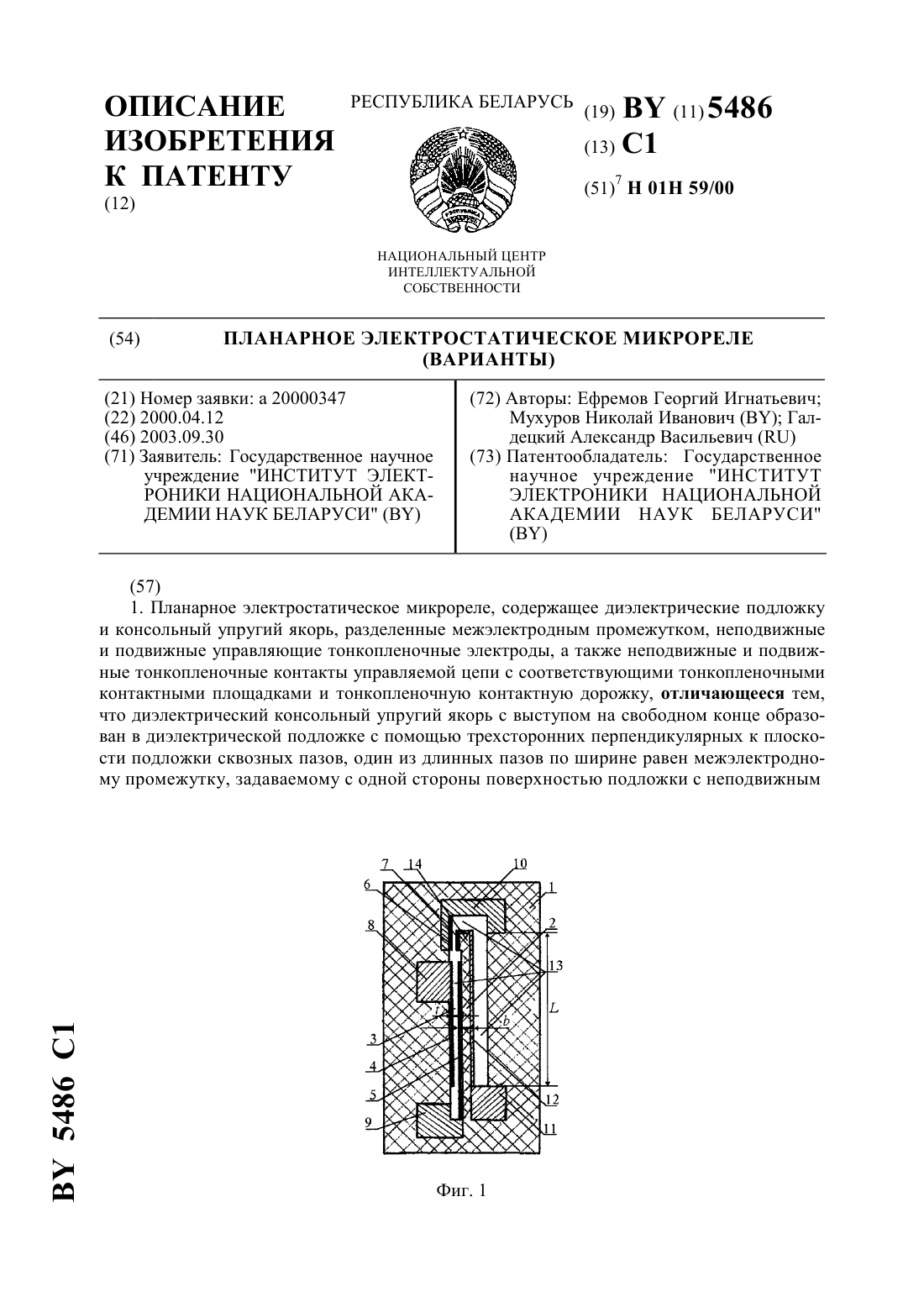
Номер патента: 5486
Опубликовано: 30.09.2003
Авторы: Мухуров Николай Иванович, Галдецкий Александр Васильевич, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: варианты, электростатическое, микрореле, планарное
Текст:
...важно, ширины межэлектродного промежутка ,толщиныи длиныдиэлектрического консольного упругого якоря, высоты выступа на свободном конце якоря с подвижным тонкопленочным контактом управляемой цепи. Нанесение токопроводящих металлических тонких пленок на две противоположные или на все четыре поверхности диэлектрического упругого консольного якоря обеспечивает в последнем при температурных перепадах симметричное распределение механических...
Низковольтное электростатическое микрореле
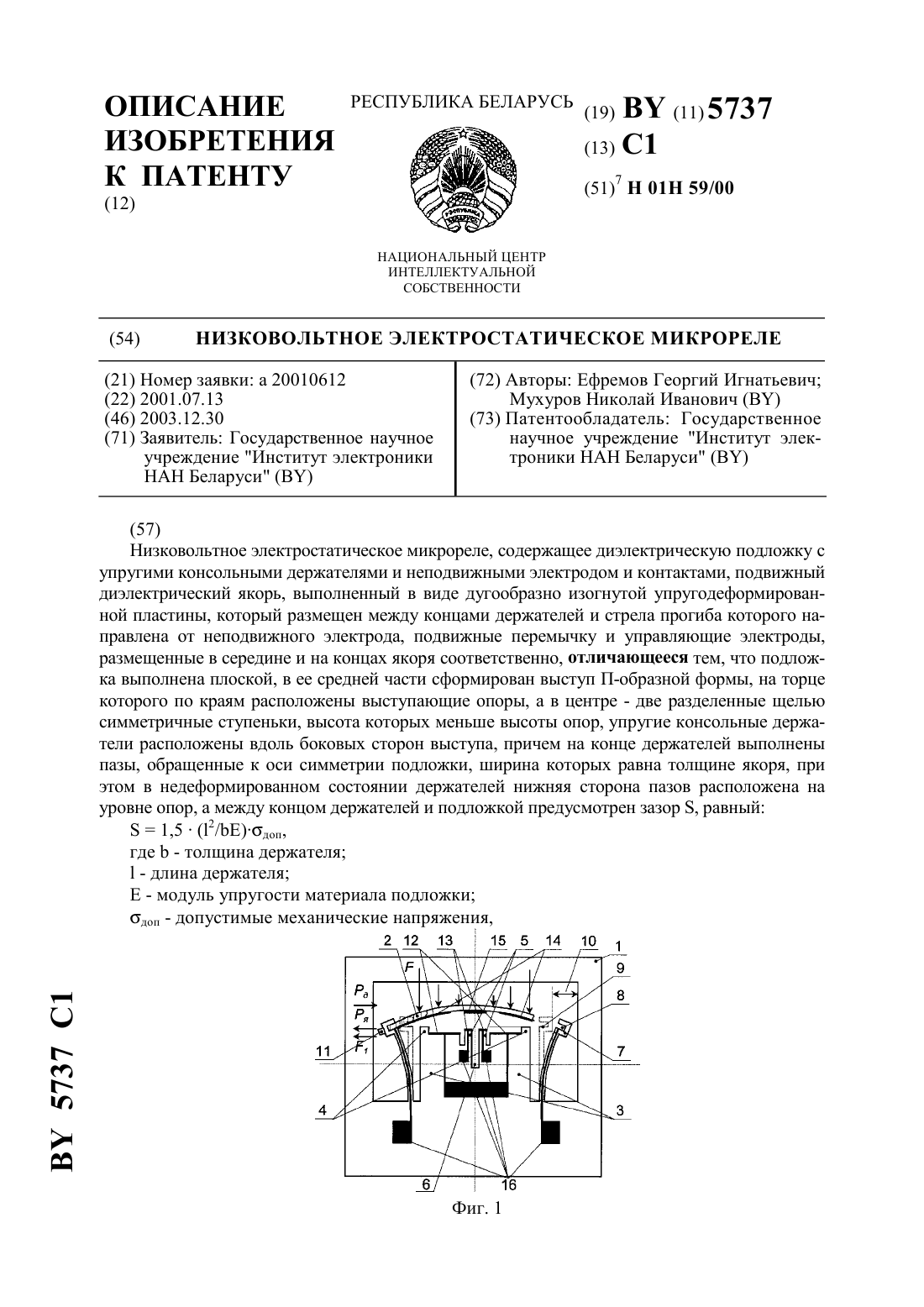
Номер патента: 5737
Опубликовано: 30.12.2003
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: микрореле, электростатическое, низковольтное
Текст:
...перемычку и управляющие электроды, размещенные в середине и на концах якоря, соответственно, подложка выполнена плоской, в ее средней части сформирован выступ П-образной формы, на торце которого по краям расположены выступающие опоры, а в центре - две разделенные щелью симметричные ступеньки, высота которых меньше высоты опор, упругие консольные держатели расположены вдоль боковых сторон выступа, причем на конце держателей выполнены пазы,...
Предыдущий патент: Устройство для обработки деталей пластическим деформированием
Следующий патент: Способ обеззараживания питательной среды дрожжевого производства (варианты)
Случайный патент: Способ получения сложного этилового эфира аповинкаминовой кислоты