Цифровая следящая система управления
Текст
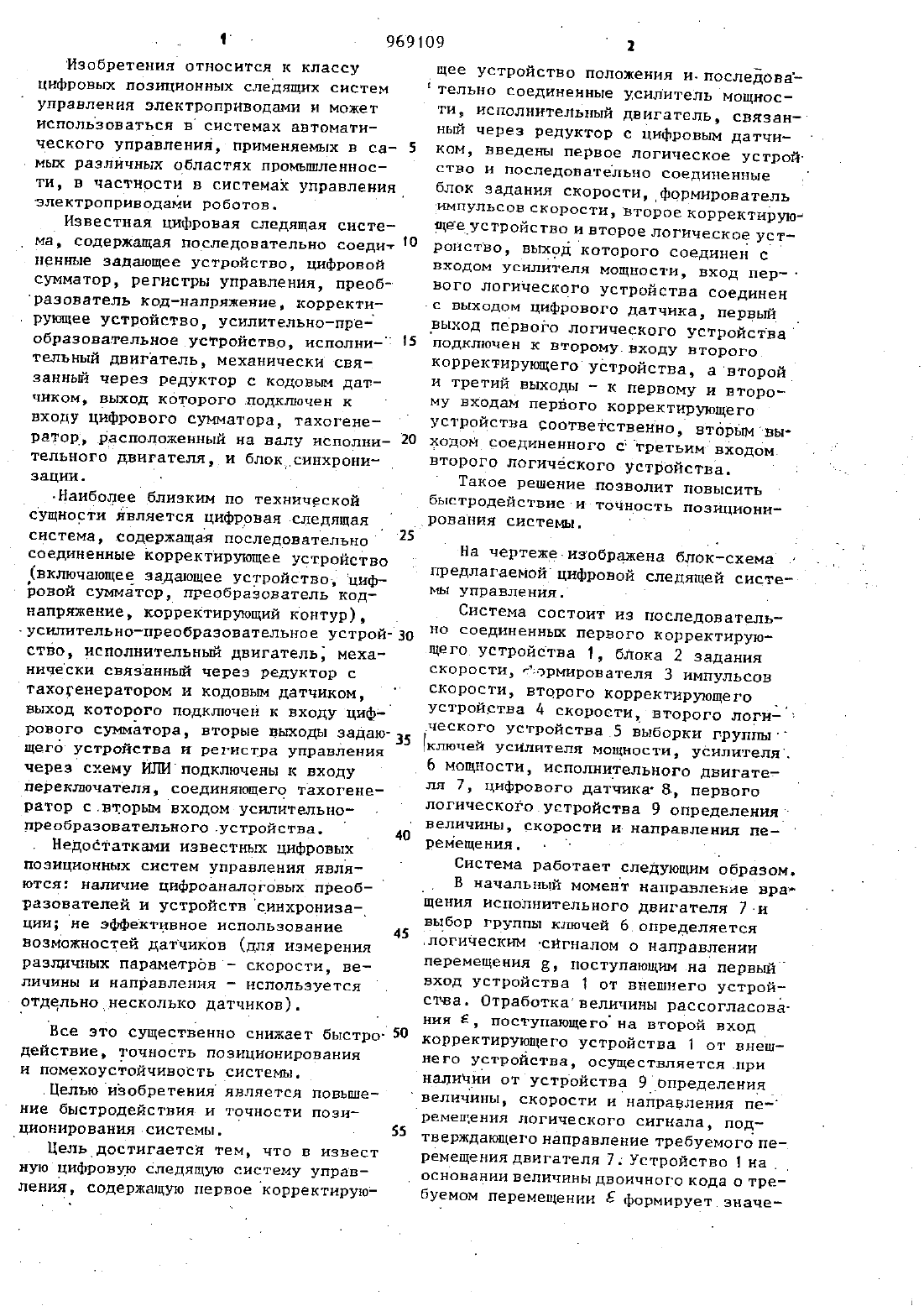
ГОСУДАРСТВЕННЫЙ комитет СССР .темауправленИд электроприводами. Л. ЭнергияЕ,1972 гл. 8, с. 241. рд Адторское соидетельотвоСССР т, ю 438984, кл. с 05 в 15/о 2 т 1973,(54)(57) цифговдя слЕдЯЩАя СИСТЕМА тдвлвния, содержащая первое корректирующее устройство положения ипоследовательно соединенные усилитель мощ востн, исполнительный двигатель, свя-1 ванный через редуктор с цифровым.датДт чиком,о т пи ча ю Щ а я с я. тем 2-Тв нее введены порвоелогическое уст ройство и последовательно-соединенные блок задания скорости,-форммрователь импульсов скоростн,второе корректноРУЮЩЕЕ УСТРОЙСТДО и второе логическое устройство выход которого соединенс входом усидмтедямощностн, вход пер вого логического устройства соедннен с выходом цифрового датчика, первый выход первого логиоеского устройстваПОДКЛЮЧВН 1 С БТОРОМУ ВХОДЕ ВТОРОГОи третий выходы к первому и второму входам первого корректирующего устройства 1 соответствнно вторым выходом соединенного сдтретьи-входом второгот Изобретения относится к классу цифровых позиционных следящих систем управления электроприводами и может использоваться в системах автоматического управления, применяемых в самых различных областях промшленнос ти в частности в системах управления электроприводами роботов. П Известная цифровая следящая система, содержащая последовательно соедит пенные задающее устройство, цифровой сумматор, регистры управления, преоборующее устройство, усилительно-пред образовательное устройство, исполнительный двигатель, механически связанный через редуктор с кодовым датчиком, выход которого подключен к входу цифрового сумматора, тахогене ратор, расположенный на валу исполнительного двигателя, и блок синхронизации. Усистема, содержащая последовательно соединенные корректирующее устройствоство, исполнительный двигатель, меха нически связанный через редуктор стахогенератором и кодовы датчиком, ВЫХОД КОТОРОГО ПОДКЛЮЧЕН К ВКОДУ цифрового СУММВТОРН, ВТОРЫЕ ВЫХОДЫ задаю щего устройства нрегнстра управления через схему ИЛИ подключены к входу переключателя, соединяющего тахогеие ратор с вторьш входом усилительно преобразовательного.устройства. Недостатками известных цифровых позиционных систем управления являются наличие цифроаналоговых преоб разователей и устройств синхронизат ции не эффективное использование возможностей датчиков (для измерения различных параметров скорости, величины и направления используетсяВсе это существенно снижает быстродействие, точность позиционирования и помехоустойчивость системы.Целью изобретения является повыше ние быстродействия и точности позитЦель достигается тем, что в извест ную цифровую следящую систему управления, содержащую первое корректирую 959109Щее устройство положения и-посдедовательно соединенные усилитель мощности исполнительный двигатель, связанНЬЙ Через Редуктор с цифровым датчиком, введены первое логическое устрой ство и последовательно соединенные блок задания скоростиформирователь импульсовскорости,второекорректируш. щееустройствовавтороелогическоеуст Роиство, выход которого соединен с входом усилителя мощности, вход первого логического устройства соединен с выходом цифрового датчика, первый выход первого логического устройства Подключен к второму.вкоду второго К 0 РРЕКТИРУЮЩеГ 0 Устройства,И Третий выходы к первому и второму входам первого корректирующего УСТРФЙСТВН соответственно, втдрм-выходом соединенного с третьим входом,второго логического устройства.Такое решение позволит повысить 5 ЫСТрОдЕйствие-и точность позиционирования системы.На чертеже-изображена блоксхема предлагаемой цифровой следящей систет мы управления.Система состоит из последовательно соединенньш первого корректируюЩегоустройства 1, блока 2 задания ск 0 росТИэрмирователя 3 импульсов СКОРОСТИ, второго корректирующего Устройства 4 скорости, второго логид,ческого устройства 5 выборки группы ключей усилителя мощности, усилителяЦоб мощности, исполнительного двигатеч ля 7, цифрового датчика 8, первого логическогоустройства 9 определения величины, скорости И-направления пеА ремещения. 7Система работает следующим образом., В начальный момент направление врае щения исполнительного двигателя 7-и выбор группы ключей 6 определяется.логическим гсигналом о направлении перемещения 5, поступающи.на первы вход устройства 1 от внешнего устройства. Отработкавеличины рассогласования Е, поступающегона второй вход корректирующего устройства 1 от внепнего устройства, осуществляется.при наличии от устройства 9 определениявеличины, скорости и направления пед ремещения логического сигнала, подтверждающегонаправленнетребуемогопе ремещениядвигателя 7 Устройство 1 на основании величины двоичного кода о тре 5 У 9 М 0 М перемещении формирует значетиие номинальной скорости 5 м ВВНде чдвоичного параллельного кода, посту пающего на вход блока 2, И ОПРЭДЕЛЕТ ймомеиты достижениясистемой номинального значения скорости и переключе 5 уния системы на режим торможенияБлок 2 предназначен для обеспечес ния постепенного достижения системой знаиения скорости, соответствующего дначению 52. а в момент перехода 10 системы на режим торможения для постепенного понижения скорости с но минального значения до НУЛЯ И ВЬЩЭЕТ. на вход формирователя 3 текущее зна чение скорости 5 в виде двоичного 15параллельного кода. Формирователь формирует импульсы желаемой скорости в виде двоичного последовательного кода, частотадкоторых является функцией текущего значенияскорости Еж до ЕГ(Ь), поступающие на первыйвход второго корректирующего устройства 4,на второй входкоторого поступают им пульсы-скорости от устройства 9Корректирующее устройство скорос ти 4 вводится дляулучщения динамическиш характеристик, увеличения диапазона регулирования скорости н хранения текущего значения сигнала управ.ленин п(с). В момент несовпадения импульсов желаемой И истинной скорости устройЗаказ.3626/4 Тираж 836 по делам изобретений ИАство 4 формирует команды на началоРезультат измерения является теку Щим значением сигнала управления П(с) в-цифровой форме, которы постуе пает на первьй входустройства 5. Устройство 5 на основании знаков нап равления перемещения и направленияизмерения от корректирующегоустройт ства 1 и устройства 4, поступающихна его второй и третий входы, подклюц чает соответствующую группу ключейуправление исполнительны двнгатеч лем 7. ПВ предлагаемой системе измерение величины скорости и направления пе ремещения объекта управления осущест вляется одним цифровым датчиком нлогическим устройством, В то время р как в известный системак того же наз начення для измерения различных параметров перемещения используется отл дельнонесколько-датчиков. Логическое устройство позволяет.повыситьчувСТЕНТЕЛЬНОСТЬ ДЗТЧИКЭ, СТЗбИПНЗНРО вать содержимое реверсивного счетчика корректирующего устройстваположения, а тем самым устранить влияние КОЛЕбНТЕЛЬНОГО ППОЦЕССЗ, УВЕЛИЧИТЬ точность позиционирования и быстрот действиесистемы.ВНИИПИ Государственного комитета СССР
МПК / Метки
МПК: G05B 15/02
Метки: следящая, управления, система, цифровая
Код ссылки
<a href="https://by.patents.su/3-29-cifrovaya-sledyashhaya-sistema-upravleniya.html" rel="bookmark" title="База патентов Беларуси">Цифровая следящая система управления</a>
Устройство измерения параметров перемещения
Номер патента: 28
Опубликовано: 30.05.1994
Авторы: Филиппович Валерий Николаевич, Дашкевич В. В.
МПК: G01P 3/489
Метки: перемещения, измерения, устройство, параметров
Текст:
...по ошюму из выходов.Дсдтифратор 5 предназначен для работы в тм реэкнм и реалиэаитти одной и слеЭлемент 8 задержки предназначен для храпения предъшушето состояния децдафратора 5,раслрепелитеш 9 и 12 для работы в шем реиотме и реализуют одну из следующих 41 фрикштн, первый хшъ-хд. х К - Хг-ЧКС атчпкое 2 ста-катаются сист-таль прямоуголь т срормьъ, спвииутьте по фазе. Сигналы усиливаются в усилителе 2 и поступают затем че рез соорштрователъ З...
Предыдущий патент: Устройство измерения параметров перемещения
Следующий патент: Складная тара для транспортирования велосипедов
Случайный патент: Устройство для перемещения и накопления ящиков, заполненных растениями