Бесконтактный ультразвуковой двигатель
Номер патента: 17459
Опубликовано: 30.08.2013
Авторы: Асимов Рустам Мустафьевич, Степаненко Дмитрий Александрович, Минченя Владимир Тимофеевич, Роппельт Хельмут, Минченя Виталий Владимирович
Текст
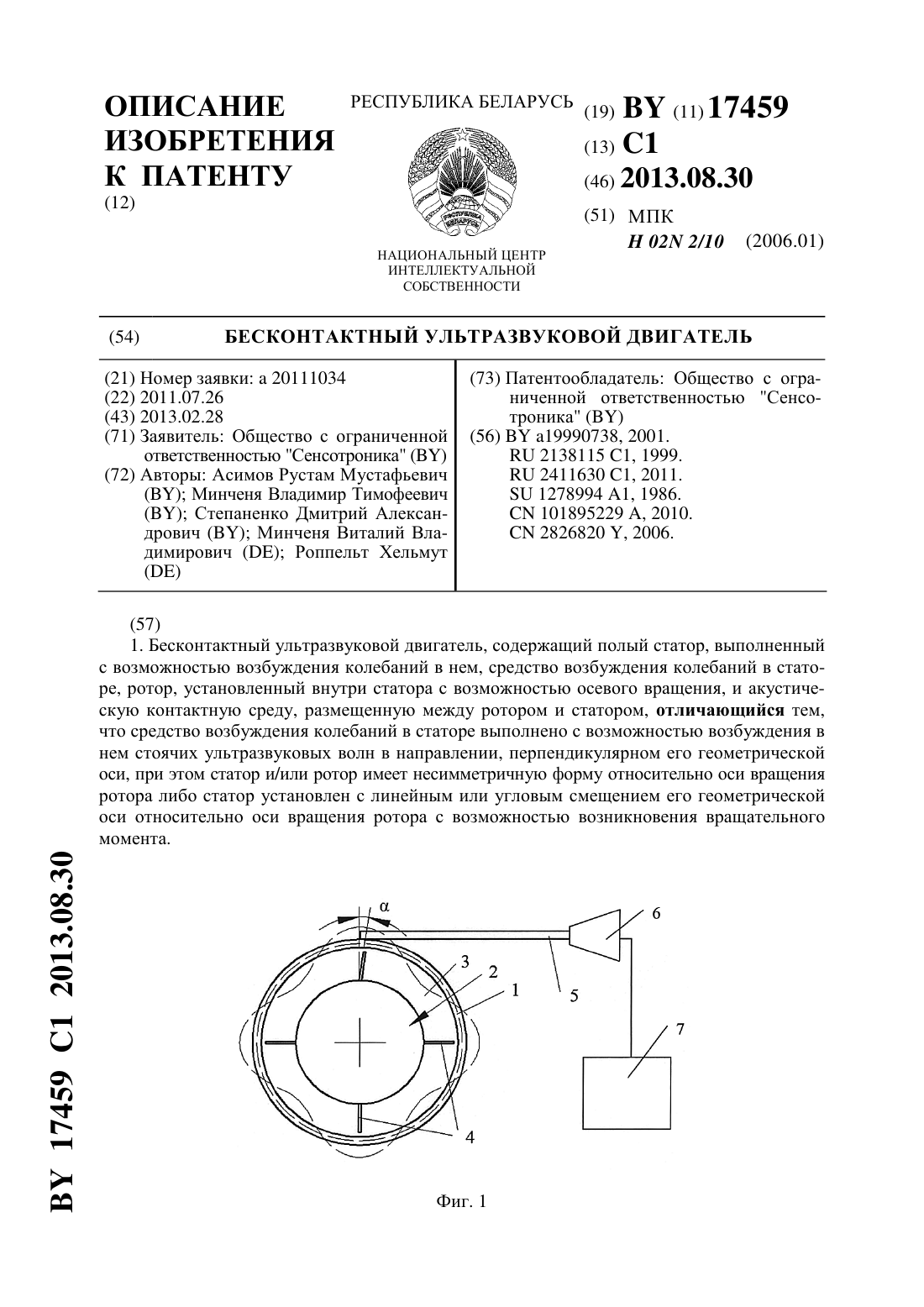
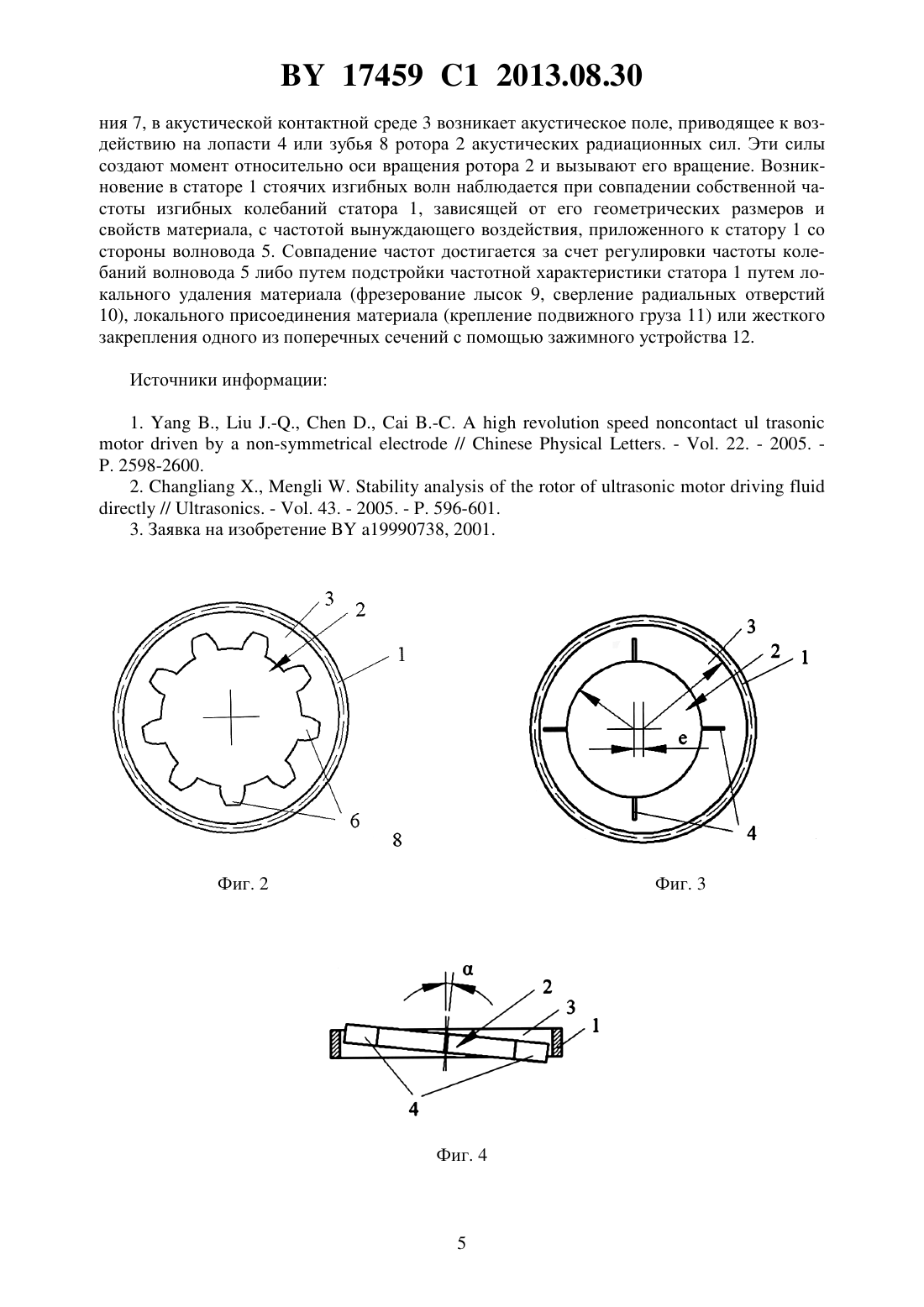
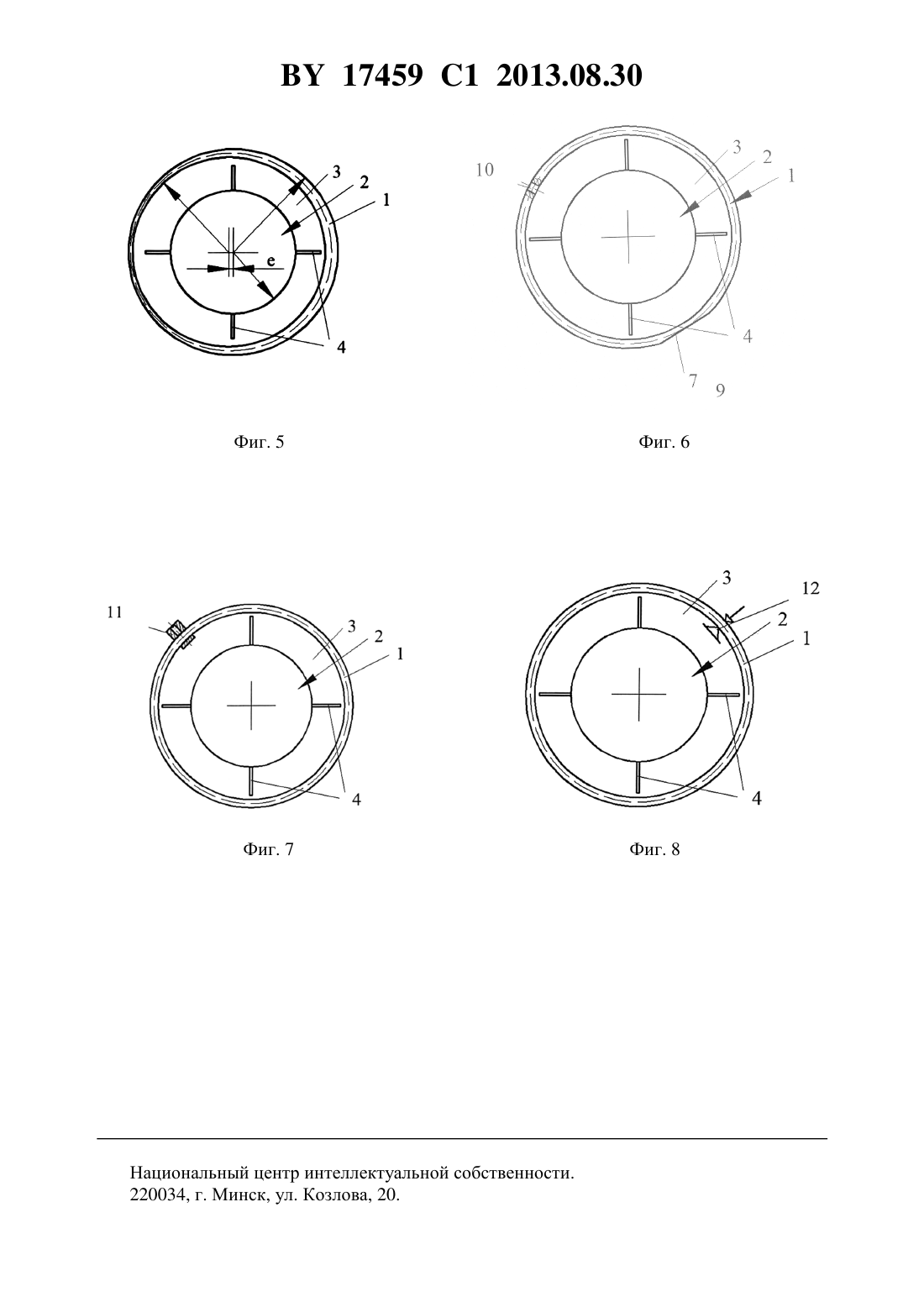
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(72) Авторы Асимов Рустам Мустафьевич Степаненко Дмитрий АлександровичМинченя Виталий ВладимировичРоппельт Хельмут(57) 1. Бесконтактный ультразвуковой двигатель, содержащий полый статор, выполненный с возможностью возбуждения колебаний в нем, средство возбуждения колебаний в статоре, ротор, установленный внутри статора с возможностью осевого вращения, и акустическую контактную среду, размещенную между ротором и статором, отличающийся тем,что средство возбуждения колебаний в статоре выполнено с возможностью возбуждения в нем стоячих ультразвуковых волн в направлении, перпендикулярном его геометрической оси, при этом статор и/или ротор имеет несимметричную форму относительно оси вращения ротора либо статор установлен с линейным или угловым смещением его геометрической оси относительно оси вращения ротора с возможностью возникновения вращательного момента. 17459 1 2013.08.30 2. Двигатель по п. 1, отличающийся тем, что ротор содержит лопасти. 3. Двигатель по п. 2, отличающийся тем, что указанные лопасти расположены несимметрично относительно оси вращения ротора. 4. Двигатель по любому из пп. 1-3, отличающийся тем, что статор выполнен с несимметричным распределением изгибной жесткости относительно оси вращения ротора. Изобретение относится к устройствам для преобразования механических колебаний, в частности, создаваемых с помощью пьезоэлектрического или магнитострикционного эффектов, во вращательное движение, в частности, к бесконтактному акустическому двигателю. Акустические (ультразвуковые) двигатели широко известны из уровня техники и основаны на преобразовании механических колебаний статора во вращательное движение ротора. Существуют контактные и бесконтактные акустические двигатели. В двигателях контактного типа вращение ротора осуществляется за счет модуляции сил трения, действующих на него при контактном взаимодействии со статором. В двигателях бесконтактного типа ротор и статор не имеют непосредственного контакта друг с другом и между ними размещают акустическую контактную среду в виде жидкости или газа. Колебания статора возбуждают акустические волны в контактной среде, и эти волны производят силовое воздействие на ротор за счет эффектов акустических течений или акустической радиационной силы. В качестве аналога заявляемого устройства может быть принят бесконтактный акустический двигатель, содержащий статор, выполненный в виде диска, совершающего изгибные колебания в направлении, параллельном его геометрической оси, ротор,выполненный в виде диска, снабженного лопастями, средство возбуждения изгибных колебаний статора, выполненное в виде пьезоэлемента с асимметричным секционированным электродом, и акустическую контактную среду (воздух), размещенную между ротором и статором 1. Недостатком двигателя является необходимость возбуждения в статоре бегущей изгибной волны, что усложняет конструкцию двигателя и систему управления им. В частности, для возбуждения бегущей волны используется секционированный электрод,а для управления двигателем на секции электрода подаются смещенные друг относительно друга по фазе электрические сигналы. Известен бесконтактный акустический двигатель, содержащий полый цилиндрический статор, совершающий изгибные колебания в плоскости, перпендикулярной его геометрической оси, средство возбуждения изгибных колебаний статора, выполненное в виде пьезоэлемента с секционированным электродом, цилиндрический ротор, установленный внутри статора с возможностью вращения, и акустическую контактную среду (жидкость),размещенную между ротором и статором 2. Недостатком прототипа является необходимость возбуждения в статоре бегущей изгибной волны, что усложняет конструкцию двигателя и систему управления им. Прототипом заявляемого изобретения является бесконтактный акустический двигатель, выполненный в виде вибромотора, содержащего корпус, вибрирующий статор и ротор, и между ними помещена электрореологическая жидкость, вязкостью которой управляют синфазно с колебаниями статора за счет переменного электрического поля в зазоре между ротором и статором 3. Задачей изобретения является разработка бесконтактного акустического двигателя, в котором вращение ротора будет обеспечиваться путем возбуждения в статоре стоячих изгибных волн, что упростит конструкцию двигателя и систему управления им. Поставленная задача решается тем, что в заявляемом бесконтактном акустическом двигателе, содержащем статор, выполненный с возможностью возбуждения колебаний в нем, средство возбуждения колебаний в статоре, ротор, установленный внутри статора с возможностью вращения,и акустическую контактную среду, размещенную между рото 2 17459 1 2013.08.30 ром и статором, по меньшей мере средство возбуждения колебаний в статоре выполнено с возможностью возбуждения в нем стоячих ультразвуковых волн в направлении, перпендикулярном его геометрической оси, при этом статор и/или ротор имеет несимметричную форму относительно оси вращения ротора либо статор установлен с линейным или угловым смещением его геометрической оси относительно оси вращения ротора с возможностью возникновения вращательного момента. В предпочтительном варианте реализации ротор содержит лопасти, которые в возможном варианте расположены несимметрично относительно оси вращения ротора. Также возможен вариант реализации, в котором статор выполнен с несимметричным распределением изгибной жесткости относительно оси вращения ротора. В качестве средства возбуждения изгибных колебаний статора может быть использовано любое известное из уровня техники средство возбуждения упругих колебаний и волн, например, контактные средства на основе пьезоэлектрического или магнитострикционного эффекта и бесконтактные средства с применением лазерного излучения или акустических радиационных сил. В качестве акустической контактной среды могут быть использованы жидкие и газообразные среды, включая воздух. Под симметрией понимается осевая симметрия, то есть наличие для каждой из точек тела (ротора или статора) равноудаленной по отношению к оси симметрии точки, лежащей в плоскости, проходящей через рассматриваемую точку тела и ось симметрии. Следует иметь в виду, что возможны разнообразные конструктивные варианты выполнения ротора, обеспечивающие асимметричность его формы по отношению к оси его вращения. Например, ротор может быть снабжен лопастями или зубьями (ротор в виде зубчатого колеса), расположенными асимметрично по отношению к оси его вращения. Асимметричность расположения может достигаться за счет изменения угла наклона (длины, высоты, расположения или других позиционно-геометрических параметров) по меньшей мере одной из лопастей. Асимметричными в смысле осевой симметрии также будут являться конструктивные варианты, в которых ротор снабжен нечетным числом лопастей(зубьев), расположенных с равномерным окружным шагом, - это позволяет использовать в качестве ротора стандартное зубчатое колесо с нечетным числом зубьев. Асимметричность распределения изгибной жесткости статора по отношению к оси вращения ротора может быть достигнута за счет локального или непрерывного изменения массово-инерционных характеристик поперечных сечений статора либо за счет жесткого или упругого закрепления одного или нескольких поперечных сечений статора. Возможными, но не ограничивающими общности вариантами реализации первой схемы являются использование статора в виде кольца (трубки) с эксцентричным расположением наружной и внутренней поверхностей (непрерывное изменение массово-инерционных характеристик), а также локальное присоединение или удаление материала (локальное изменение массово-инерционных характеристик) например, путем сверления радиальных отверстий,фрезерования лысок, закрепления на статоре дополнительных масс. Принцип работы двигателя основан на воздействии на ротор акустических радиационных сил со стороны акустического поля, создаваемого статором в акустической контактной среде. Эти силы создают момент, зависящий от углового положения ротора относительно статора и приводящий к вращению ротора. Расчеты и экспериментальные исследования показывают, что необходимым условием стабильного вращения ротора является наличие асимметрии, описанной в формуле изобретения. Более подробно возможные варианты реализации изобретения рассматриваются далее со ссылками на позиции фигур. На фигурах изображены фиг. 1 - схема конструкции бесконтактного акустического двигателя, содержащего ротор, снабженный лопастями, расположенными несимметрично относительно оси вращения ротора 17459 1 2013.08.30 фиг. 2 - схема конструкции бесконтактного акустического двигателя, содержащего ротор, асимметричный по отношению к оси его вращения фиг. 3 - схема конструкции бесконтактного акустического двигателя, в котором геометрическая ось статора расположена с линейным смещением по отношению к оси вращения ротора фиг. 4 - схема конструкции бесконтактного акустического двигателя, в котором геометрическая ось статора расположена с угловым смещением по отношению к оси вращения ротора фиг. 5 - схема конструкции бесконтактного акустического двигателя, в котором статор выполнен с асимметричным по отношению к оси вращения ротора распределением изгибной жесткости (вариант) фиг. 6 - схема конструкции бесконтактного акустического двигателя, в котором статор выполнен с асимметричным по отношению к оси вращения ротора распределением изгибной жесткости (вариант) фиг. 7 - схема конструкции бесконтактного акустического двигателя, в котором статор выполнен с асимметричным по отношению к оси вращения ротора распределением изгибной жесткости (вариант) фиг. 8 - схема конструкции бесконтактного акустического двигателя, в котором статор выполнен с несимметричным распределением изгибной жесткости относительно оси вращения ротора (вариант). Акустический двигатель согласно фиг. 1 состоит из полого статора, выполненного в виде кольца 1 и ротора 2, между которыми размещена акустическая контактная среда 3(воздух). Ротор 2 снабжен лопастями 4, одна из которых наклонена на уголотносительно нормали к боковой поверхности ротора 2. В статоре возбуждают стоячие изгибные волны с колебательными смещениями в направлении, перпендикулярном его геометрической оси. Эпюра колебательных смещений представлена в виде штриховой линии. В качестве средства возбуждения изгибных колебаний статора используют волновод 5, который может быть связан с пьезоэлектрическим или магнитострикционным ультразвуковым преобразователем 6 и электронной системой управления 7. На последующих фигурах средство возбуждения изгибных колебаний статора, ультразвуковой преобразователь и система управления не показаны. В акустическом двигателе согласно фиг. 2 ротор 2 снабжен зубьями 8, то есть выполнен в виде зубчатого колеса. Ротор 2 должен иметь нечетное число зубьев 8 (в представленном на фигуре варианте - 9 штук). В акустическом двигателе согласно фиг. 3 статор 1 расположен с линейным смещением относительно ротора 2 на величину , а в акустическом двигателе согласно фиг. 4 - с угловым смещением на величину . В акустическом двигателе согласно фиг. 5 наружная поверхность статора 1 выполнена с эксцентриситетомотносительно внутренней поверхности, то есть выполнено непрерывное изменение массово-инерционных характеристик поперечных сечений и изгибной жесткости статора 1. В акустическом двигателе согласно фиг. 6-7 выполнено локальное изменение массовоинерционных характеристик поперечных сечений статора 1. В двигателе согласно фиг. 6 это достигается за счет локального удаления материала путем фрезерования лыски 9 и сверления радиального отверстия 10, а в двигателе согласно фиг. 7 - за счет локального присоединения материала путем крепления на статоре 1 подвижного груза 11. В акустическом двигателе согласно фиг. 8 выполнено локальное изменение изгибной жесткости статора 1 за счет жесткого закрепления одного из поперечных сечений с помощью зажимного устройства 12. Двигатель работает следующим образом. При возбуждении в статоре 1 стоячих изгибных волн с помощью волновода 5, ультразвукового преобразователя 6, системы управле 4 17459 1 2013.08.30 ния 7, в акустической контактной среде 3 возникает акустическое поле, приводящее к воздействию на лопасти 4 или зубья 8 ротора 2 акустических радиационных сил. Эти силы создают момент относительно оси вращения ротора 2 и вызывают его вращение. Возникновение в статоре 1 стоячих изгибных волн наблюдается при совпадении собственной частоты изгибных колебаний статора 1, зависящей от его геометрических размеров и свойств материала, с частотой вынуждающего воздействия, приложенного к статору 1 со стороны волновода 5. Совпадение частот достигается за счет регулировки частоты колебаний волновода 5 либо путем подстройки частотной характеристики статора 1 путем локального удаления материала (фрезерование лысок 9, сверление радиальных отверстий 10), локального присоединения материала (крепление подвижного груза 11) или жесткого закрепления одного из поперечных сечений с помощью зажимного устройства 12. Источники информации 1..,.-.,.,.-.-//. - . 22. - 2005. . 2598-2600. 2..,.// . - . 43. - 2005. - . 596-601. 3. Заявка на изобретение 19990738, 2001. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: H02N 2/10
Метки: ультразвуковой, бесконтактный, двигатель
Код ссылки
<a href="https://by.patents.su/6-17459-beskontaktnyjj-ultrazvukovojj-dvigatel.html" rel="bookmark" title="База патентов Беларуси">Бесконтактный ультразвуковой двигатель</a>
Магнитоэлектрический двигатель
Номер патента: 7196
Опубликовано: 30.09.2005
Авторы: Счислёнок Владимир Никитич, Счислёнок Сергей Владимирович
МПК: H02N 11/00
Метки: двигатель, магнитоэлектрический
Текст:
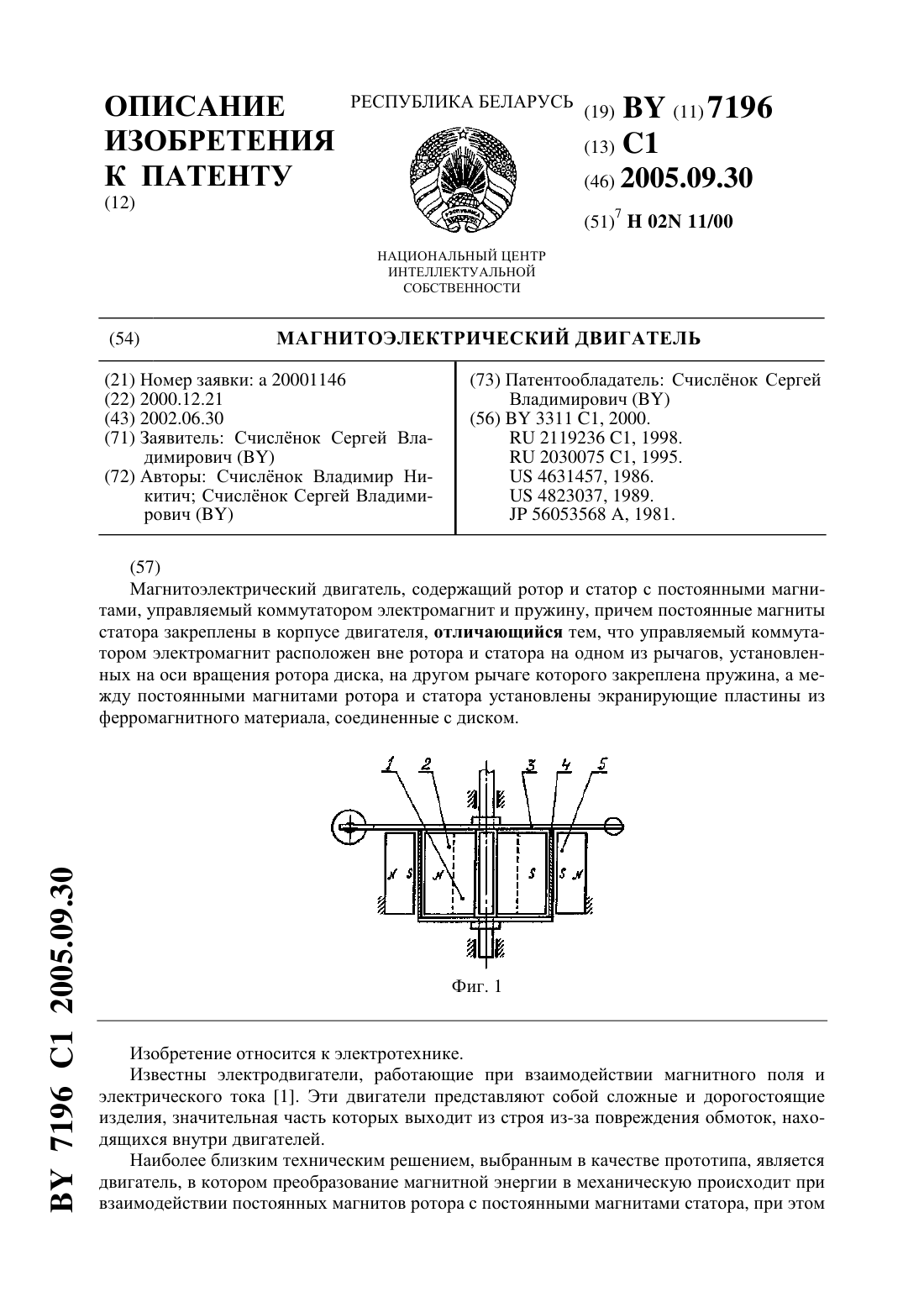
...коммутатором электромагнит расположен вне ротора и статора на одном из рычагов, установленных на оси вращения ротора диска, на другом рычаге которого закреплена пружина, а между постоянными магнитами ротора и статора установлены экранирующие пластины из ферромагнитного материала, соединенные с диском. Сущность изобретения поясняется чертежом, фиг. 1-3. Двигатель содержит ротор 1 из диэлектрического, диамагнитного или парамагнитного...
Электростатический двигатель
Номер патента: 7156
Опубликовано: 30.06.2005
Автор: Аверьянов Валерьян Яковлевич
МПК: H02N 1/08
Метки: электростатический, двигатель
Текст:
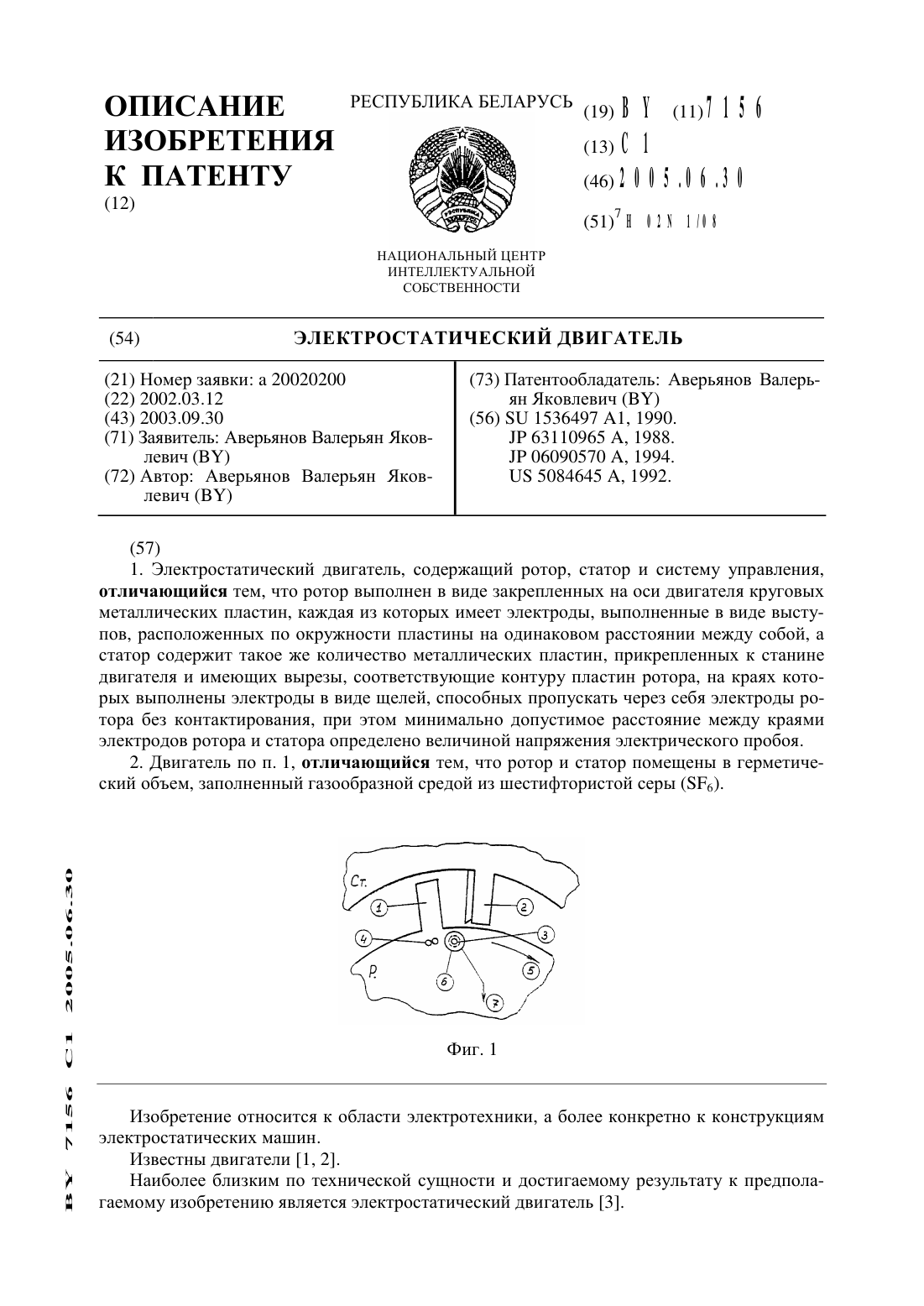
...взаимодействующих электродов, что приводит к увеличению площади взаимодействия. Количество одновременно взаимодействующих электродов Ы определяется произведением числа электродов 111, располагающихся на краях одной пластины ротора, и числа роторных пластин п 2 в конкретной конструкции двигателяМП 1 П 2 . ТОГДЗ ВВЛИЧИНЗ ПЛОЩЗДИ ВЗЗИМОДСЙСТВИЯ будет равна А МАО, где Ад - эффективная площадь взаимодействия одной пары электродов.Число...
Коллекторный двигатель постоянного тока
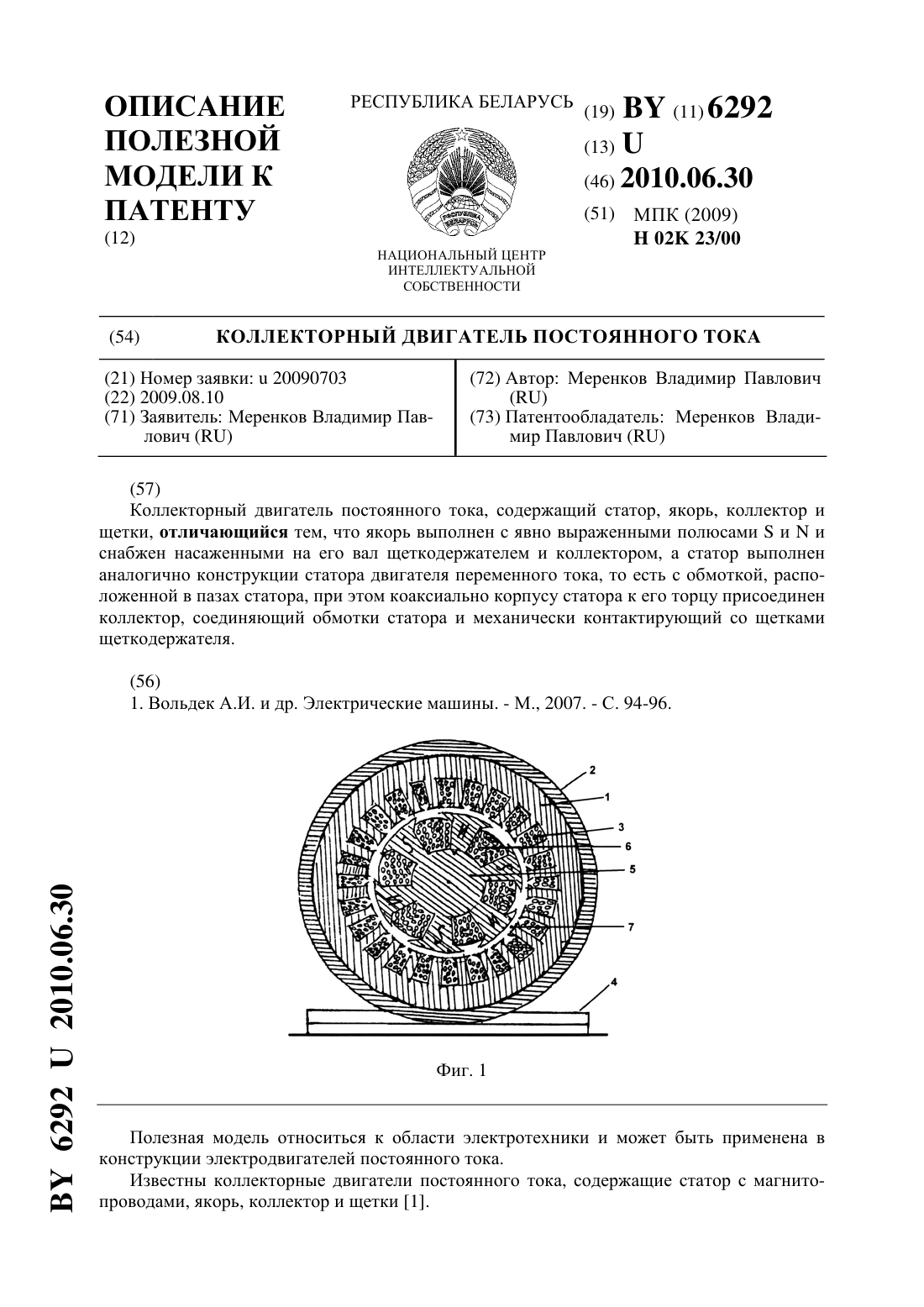
Номер патента: U 6292
Опубликовано: 30.06.2010
Автор: Меренков Владимир Павлович
МПК: H02K 23/00
Метки: тока, двигатель, постоянного, коллекторный
Текст:
...фиг. 3 коллектор - поперечный разрез. На фиг. 4 то же, вид В на фиг. 3. На фиг. 5 одна из пластин коллектора. На фиг. 6 щеткодержатель - вид с торца. На фиг. 7 то же, вид А на фиг. 6. На фиг. 8 - траверса со щеткодержателем и щетками, предназначенными для контакта с коллектором. Конструкция двигателя содержит станину 4, статор 1 (фиг. 1) цилиндрической формы с пазами с внутренней стороны. Статор вставлен в корпус 2. В пазах статора 1...
Двигатель
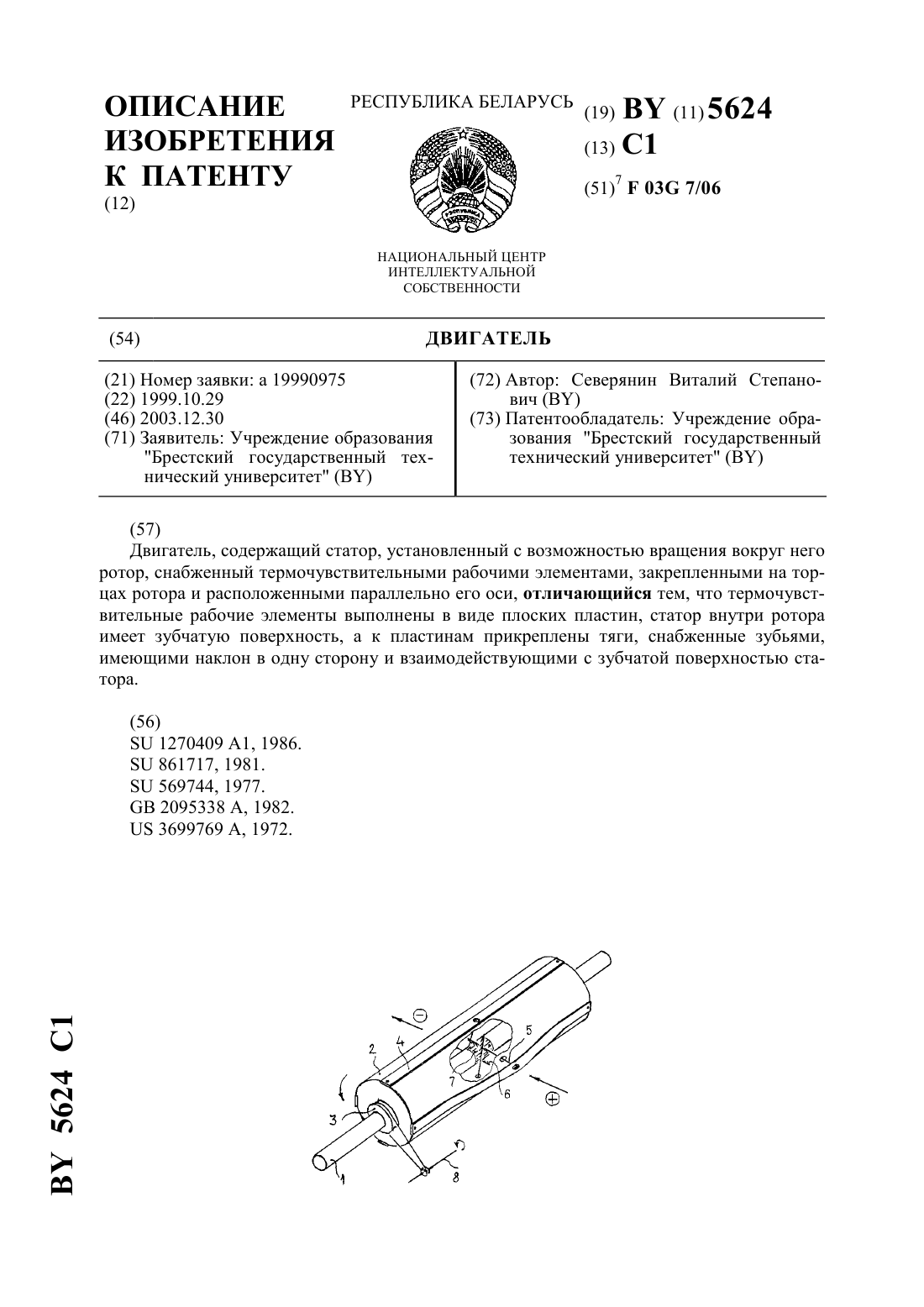
Номер патента: 5624
Опубликовано: 30.12.2003
Автор: Северянин Виталий Степанович
МПК: F03G 7/06
Метки: двигатель
Текст:
...- 3, термочувствительный рабочий элемент -4,тяга - 5, зубья - 6, зубчатая поверхность - 7, потребитель вращения - 8. Двигатель состоит из статора 1 в виде неподвижного вала. Соосно статору 1 расположен ротор 2, который соединен со статором через подшипники 3 по торцам ротора 2. Ротор 2 выполнен из цилиндра, назначение которого - обеспечить жесткую фиксацию торцов ротора 2 между собой. Цилиндр может быть перфорированным. По внешней поверхности...
Кольцевой двигатель
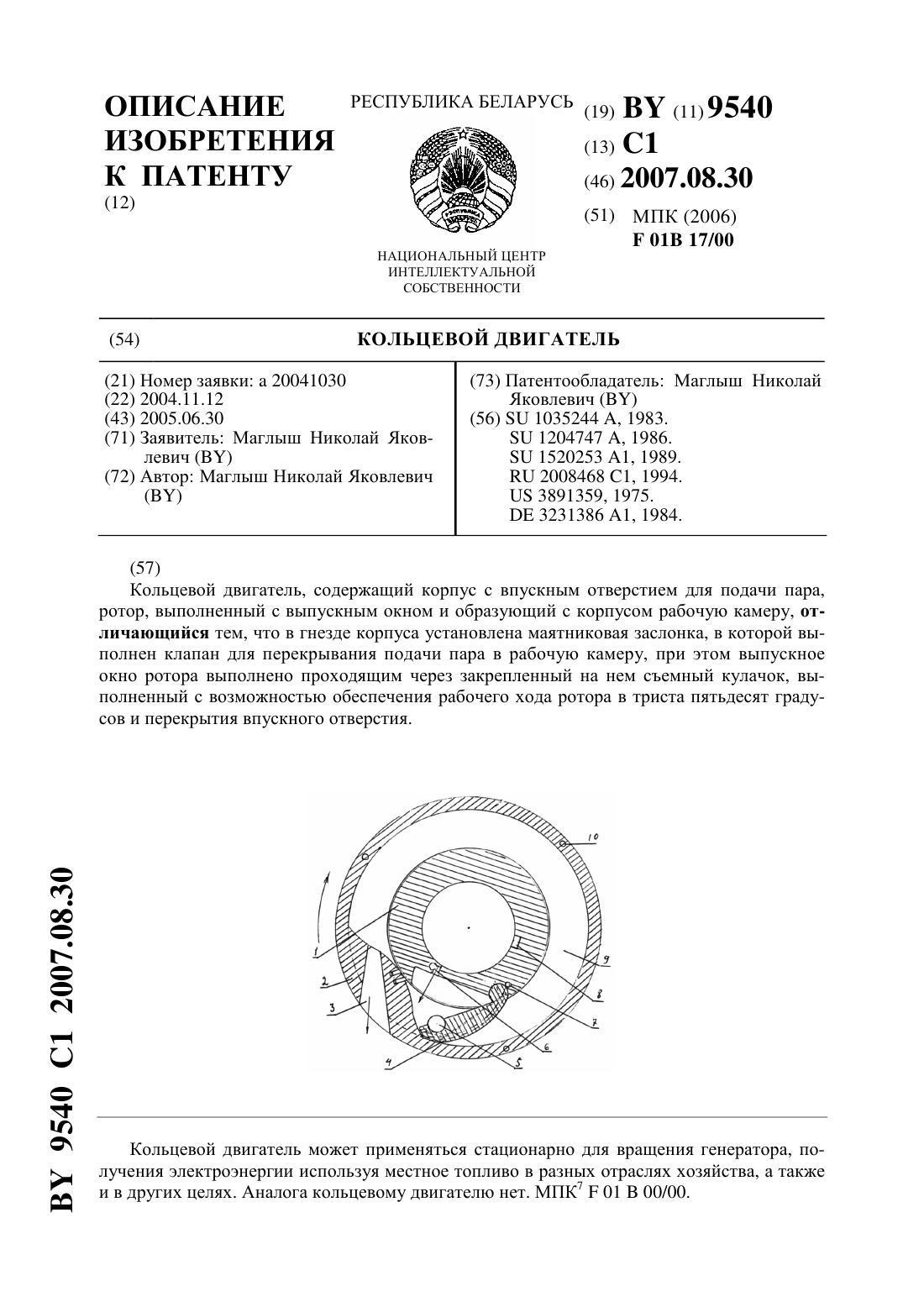
Номер патента: 9540
Опубликовано: 30.08.2007
Автор: Маглыш Николай Яковлевич
МПК: F01B 17/00
Текст:
...за каждый оборот двигателя. Рабочий цилиндр выполнен из двух частей корпуса и статора. Один конец маятниковой заслонки 4 выполнен цилиндрически и вставляется в гнездо корпуса с возможностью совершать маятниковое движение, что обеспечивает перекрывание рабочего цилиндра в противоположном направлении вращению статора в круговую, что увеличивает коэффициент и мощность двигателя и большой рычаг вращения. На фигуре изображен разрез кольцевого...
Предыдущий патент: Способ изготовления планарного микроэлектродного массива для регистрации электрофизиологических сигналов
Следующий патент: Смеситель-активатор
Случайный патент: Способ поверхностной модификации резинотехнических изделий