Пусковая установка
Номер патента: U 9589
Опубликовано: 30.10.2013
Авторы: Лукьянов Валерий Валентинович, Шаховский Владимир Егорович, Семериков Игорь Борисович, Полоневич Марк Григорьевич, Счастный Евгений Валерьевич, Скрицкий Юрий Павлович, Борис Вадим Чеславович, Сладков Алексей Константинович, Кот Александр Иванович, Емельянов Владимир Иванович, Курлович Алексей Викторович, Цурко Дмитрий Сергеевич, Полоневич Александр Маркович
Текст
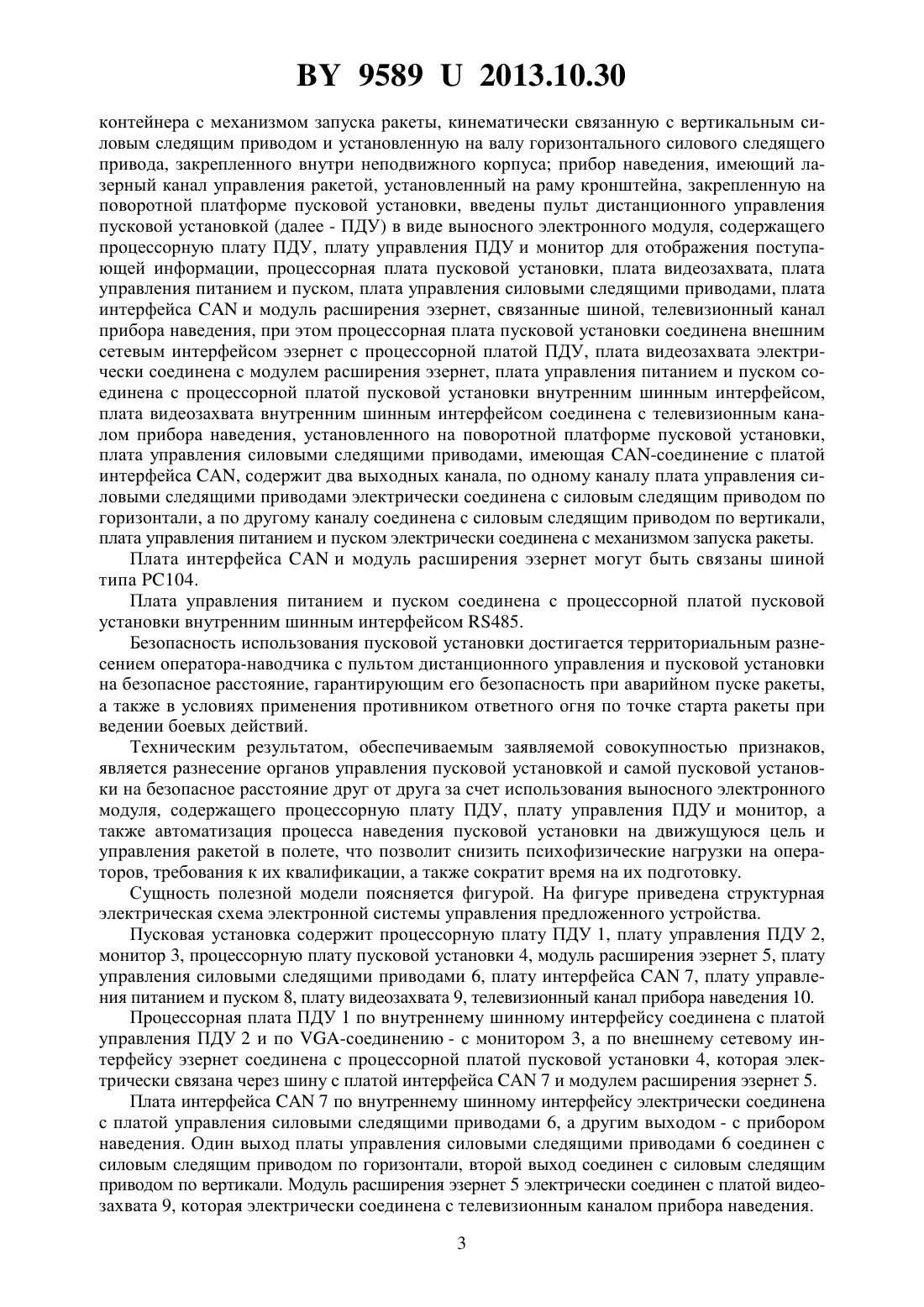
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Закрытое акционерное общество ЦНИП(72) Авторы Борис Вадим Чеславович Емельянов Владимир Иванович Кот Александр Иванович Курлович Алексей Викторович Лукьянов Валерий Валентинович Полоневич Марк Григорьевич Полоневич Александр Маркович Семериков Игорь Борисович Скрицкий Юрий Павлович Сладков Алексей Константинович Счастный Евгений Валерьевич Цурко Дмитрий Сергеевич Шаховский Владимир Егорович(73) Патентообладатель Закрытое акционерное общество ЦНИП(57) 1. Пусковая установка, включающая неподвижный корпус, закрытый кожухом, закрепленный на треножной раскладывающейся опоре, поворотную платформу с направляющей для установки транспортно-пускового контейнера с механизмом запуска ракеты, кинематически связанную с вертикальным силовым следящим приводом и установленную на валу горизонтального силового следящего привода, закрепленного внутри неподвижного корпуса прибор наведения, имеющий лазерный канал управления ракетой, установленный на раму кронштейна, закрепленную на поворотной платформе пусковой установки, отличающаяся 95892013.10.30 тем, что введены пульт дистанционного управления пусковой установкой (далее - ПДУ) в виде выносного электронного модуля, содержащего процессорную плату ПДУ, плату управления ПДУ и монитор для отображения поступающей информации, процессорная плата пусковой установки, плата видеозахвата, плата управления питанием и пуском, плата управления силовыми следящими приводами, плата интерфейсаи модуль расширения эзернет, связанные шиной, телевизионный канал прибора наведения, при этом процессорная плата пусковой установки соединена внешним сетевым интерфейсом эзернет с процессорной платой ПДУ, плата видеозахвата электрически соединена с модулем расширения эзернет, плата управления питанием и пуском соединена с процессорной платой пусковой установки внутренним шинным интерфейсом, плата видеозахвата внутренним шинным интерфейсом соединена с телевизионным каналом прибора наведения, установленного на поворотной платформе пусковой установки, плата управления силовыми следящими приводами, имеющая -соединение с платой интерфейса , содержит два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с силовым следящим приводом по горизонтали, а по другому каналу соединена с силовым следящим приводом по вертикали, плата управления питанием и пуском электрически соединена с механизмом запуска ракеты. 2. Пусковая установка по п. 1, отличающаяся тем, что плата интерфейсаи модуль расширения эзернет связаны шиной типа 104. 3. Пусковая установка по п. 1, отличающаяся тем, что плата управления питанием и пуском соединена с процессорной платой пусковой установки внутренним шинным интерфейсом 485.(56) 1. Патентна изобретение 2125699 1, МПК 41 1/00, 3/00, 1999 (прототип). Полезная модель относится к области вооружения и может использоваться в оборонительно-штурмовых огневых ракетных комплексах. Известна пусковая установка (далее - ПУ) противотанкового ракетного комплекса (далее - ПТРК) 1, содержащая корпус, закрытый кожухом, установленный на треножную раскладную опору, поворотную платформу с направляющей для установки транспортнопускового контейнера, механизмы вертикального и горизонтального наведения, механизм запуска, электрически соединенный с ракетой в транспортно-пусковом контейнере (далее ТПК), прицел-прибор наведения с лазерным каналом управления ракетой, закрепленный на поворотной платформе, выбранная за прототип как наиболее близкая по технической сущности к заявляемому устройству. Недостатком пусковой установки является то, что все органы управления наведением ПУ и пуском ракеты размещены на пусковой установке, что не обеспечивает защиту оператора-наводчика, находящегося рядом с ПУ, от возможных аварийных ситуаций, связанных с пуском ракеты, а также от ответного огня при ведении боевых действий. Кроме того, недостаточный уровень автоматизации при пуске и наведении ракеты повышает требования к уровню подготовки оператора-наводчика. Задача, на решение которой направлено заявленное техническое решение, заключается в повышении защищенности оператора за счет вынесения органов управления ПУ на безопасное расстояние от самой ПУ, а также автоматизации процесса наведения ПУ на движущуюся цель и управления ракетой в полете, что позволит снизить психофизические нагрузки на операторов, требования к их квалификации, а также сократит время на их подготовку. Поставленная задача решается тем, что в пусковую установку, включающую неподвижный корпус, закрытый кожухом, закрепленный на треножной раскладывающейся опоре, поворотную платформу с направляющей для установки транспортно-пускового 2 95892013.10.30 контейнера с механизмом запуска ракеты, кинематически связанную с вертикальным силовым следящим приводом и установленную на валу горизонтального силового следящего привода, закрепленного внутри неподвижного корпуса прибор наведения, имеющий лазерный канал управления ракетой, установленный на раму кронштейна, закрепленную на поворотной платформе пусковой установки, введены пульт дистанционного управления пусковой установкой (далее - ПДУ) в виде выносного электронного модуля, содержащего процессорную плату ПДУ, плату управления ПДУ и монитор для отображения поступающей информации, процессорная плата пусковой установки, плата видеозахвата, плата управления питанием и пуском, плата управления силовыми следящими приводами, плата интерфейсаи модуль расширения эзернет, связанные шиной, телевизионный канал прибора наведения, при этом процессорная плата пусковой установки соединена внешним сетевым интерфейсом эзернет с процессорной платой ПДУ, плата видеозахвата электрически соединена с модулем расширения эзернет, плата управления питанием и пуском соединена с процессорной платой пусковой установки внутренним шинным интерфейсом,плата видеозахвата внутренним шинным интерфейсом соединена с телевизионным каналом прибора наведения, установленного на поворотной платформе пусковой установки,плата управления силовыми следящими приводами, имеющая -соединение с платой интерфейса , содержит два выходных канала, по одному каналу плата управления силовыми следящими приводами электрически соединена с силовым следящим приводом по горизонтали, а по другому каналу соединена с силовым следящим приводом по вертикали,плата управления питанием и пуском электрически соединена с механизмом запуска ракеты. Плата интерфейсаи модуль расширения эзернет могут быть связаны шиной типа 104. Плата управления питанием и пуском соединена с процессорной платой пусковой установки внутренним шинным интерфейсом 485. Безопасность использования пусковой установки достигается территориальным разнесением оператора-наводчика с пультом дистанционного управления и пусковой установки на безопасное расстояние, гарантирующим его безопасность при аварийном пуске ракеты,а также в условиях применения противником ответного огня по точке старта ракеты при ведении боевых действий. Техническим результатом, обеспечиваемым заявляемой совокупностью признаков,является разнесение органов управления пусковой установкой и самой пусковой установки на безопасное расстояние друг от друга за счет использования выносного электронного модуля, содержащего процессорную плату ПДУ, плату управления ПДУ и монитор, а также автоматизация процесса наведения пусковой установки на движущуюся цель и управления ракетой в полете, что позволит снизить психофизические нагрузки на операторов, требования к их квалификации, а также сократит время на их подготовку. Сущность полезной модели поясняется фигурой. На фигуре приведена структурная электрическая схема электронной системы управления предложенного устройства. Пусковая установка содержит процессорную плату ПДУ 1, плату управления ПДУ 2,монитор 3, процессорную плату пусковой установки 4, модуль расширения эзернет 5, плату управления силовыми следящими приводами 6, плату интерфейса 7, плату управления питанием и пуском 8, плату видеозахвата 9, телевизионный канал прибора наведения 10. Процессорная плата ПДУ 1 по внутреннему шинному интерфейсу соединена с платой управления ПДУ 2 и по -соединению - с монитором 3, а по внешнему сетевому интерфейсу эзернет соединена с процессорной платой пусковой установки 4, которая электрически связана через шину с платой интерфейса 7 и модулем расширения эзернет 5. Плата интерфейса 7 по внутреннему шинному интерфейсу электрически соединена с платой управления силовыми следящими приводами 6, а другим выходом - с прибором наведения. Один выход платы управления силовыми следящими приводами 6 соединен с силовым следящим приводом по горизонтали, второй выход соединен с силовым следящим приводом по вертикали. Модуль расширения эзернет 5 электрически соединен с платой видеозахвата 9, которая электрически соединена с телевизионным каналом прибора наведения. 3 95892013.10.30 Плата управления питанием и пуском 8 электрически соединена с системой пуска ракеты из транспортно-пускового контейнера, размещена на поворотной платформе пусковой установки и по внешнему сетевому интерфейсу эзернет соединена с процессорной платой пусковой установки 4. Пусковая установка для оборонительно-штурмового огневого ракетного комплекса работает следующим образом. От телевизионного канала прибора наведения 10 на плату видеозахвата 9 поступает стандартный телевизионный сигнал в аналоговом виде. Плата видеозахвата 9 преобразует аналоговый телевизионный сигнал в цифровой вид и по внутреннему шинному интерфейсу передает преобразованный видеосигнал на модуль расширения эзернет 5 и затем на процессорную плату пусковой установки 4, которая поступивший видеосигнал транслирует по внешнему сетевому интерфейсу эзернет на процессорную плату пульта дистанционного управления 1, где он преобразуется в видеосигнал и передается на монитор 3. Команда с платы управления ПДУ 2 поступает по внутреннему шинному интерфейсу на процессорную плату ПДУ 1 и после обработки по внешнему сетевому интерфейсу на процессорную плату пусковой установки 4, где обрабатывается и передается далее по внутреннему шинному интерфейсу через плату интерфейса 7 на прибор наведения, в котором может устанавливаться один из трех масштабов видеоизображения - широкое поле зрения, узкое поле зрения, узкое поле зрения с двойным увеличением. По видеоизображению в широком поле зрения, отображаемому на мониторе 3, осуществляется обнаружение, распознавание и выбор цели. Производится измерение дальности до выбранной для обстрела цели. Команда на измерение дальности с платы управления ПДУ 2 через процессорную плату ПДУ 1 по внешнему сетевому интерфейсу поступает на процессорную плату пусковой установки 4 и далее по внутреннему шинному интерфейсу через плату интерфейса 7 поступает на лазерный дальномер прибора наведения. Данные результата измерения дальности до цели от прибора наведения поступают на плату интерфейса 7 и далее по внутреннему шинному интерфейсу на процессорную плату пусковой установки 4, а затем по внешнему сетевому интерфейсу эзернет передаются на процессорную плату ПДУ 1 и после обработки отображаются на мониторе 3. При принятии решения на пуск ракеты по команде с платы управления ПДУ 2, поступающей по внутреннему шинному интерфейсу на процессорную плату пульта дистанционного управления 1 и далее по внешнему сетевому интерфейсу эзернет на процессорную плату пусковой установки 4, внутреннему шинному интерфейсу на плату интерфейса 7, а с нее по отдельному интерфейсу на прибор наведения, на нем устанавливается масштаб видеоизображения - узкое поле зрения либо узкое поле с двойным увеличением. По видеоизображению в узком поле зрения (узком поле зрения с двойным увеличением),индицируемому на мониторе пульта дистанционного управления, производится прицеливание по выбранной для обстрела цели. Команды наведения пусковой установки на выбранную цель с платы управления ПДУ 2 через процессорную плату ПДУ 1 по внешнему сетевому интерфейсу поступают на процессорную плату пусковой установки 4 и далее по внутреннему шинному интерфейсу через плату интерфейса 7 на плату управления силовыми следящими приводами по горизонтали и вертикали 6. Плата управления силовыми следящими приводами 6 вырабатывает управляющие сигналы, соответствующие поступившим от пульта дистанционного управления командам управления, и передает их следящим силовым приводам по горизонтали и вертикали. Силовые следящие привода по горизонтали и вертикали отрабатывают поступившие на них с платы управления 6 управляющие сигналы. Данные о текущем значении пространственного положения силовых следящих приводов по горизонтали и вертикали поступают от приводов на плату управления силовыми следящими приводами 6, с нее по внутреннему шинному интерфейсу поступают на плату интерфейса 7 и далее на процессорную плату пусковой установки 4, а затем по внешнему сетевому интерфейсу на плату пульта 4 95892013.10.30 дистанционного управления 1 и после обработки по -соединению на монитор 3 пульта дистанционного управления. Запуск ракеты инициируется командой СТАРТ с платы управления ПДУ 2 через процессорную плату пульта дистанционного управления 1 по внешнему сетевому интерфейсу на процессорную плату пусковой установки 4, а далее по внутреннему шинному интерфейсу на плату управления питанием и пуском 8. При поступлении команды СТАРТ плата управления питанием и пуском 8 формирует аналоговый управляющий сигнал ПОДЖИГ и подает его на систему пуска ракеты из транспортно-пускового контейнера. По истечении времени задержки происходит старт ракеты из транспортно-пускового контейнера. По выходу ракеты из транспортно-пускового контейнера вырабатывается аналоговая команда СХОД, которая от транспортно-пускового контейнера поступает на плату управления питанием и пуском 8 и оцифровывается, затем по внутреннему шинному интерфейсу через процессорную плату пусковой установки 4 поступает на плату интерфейса 7 и по отдельному интерфейсу на лазерный канал управления прибора наведения, инициируя формирование лазерного поля управления ракетой в полете. В процессе полета ракеты к цели по монитору пульта дистанционного управления контролируется положение точки прицеливания относительно цели. При необходимости,с платы управления ПДУ 2 по внешнему сетевому интерфейсу на процессорную плату пусковой установки 4, и далее по внутреннему шинному интерфейсу на плату интерфейса 7, и затем на плату управления силовыми следящими приводами 6 подаются команды управления, корректирующие текущее положение силовых следящих приводов по горизонтали и вертикали. На плате управления силовыми следящими приводами 6 вырабатываются корректирующие сигналы управления, соответствующие поступившим командам управления, которые поступают на силовые следящие привода по горизонтали и вертикали. Процесс отработки корректирующих команд силовыми следящими приводами контролируется по монитору пульта дистанционного управления. В качестве процессорной платы пульта дистанционного управления 1 может быть использована типовая процессорная плата формата /104- РСМ-3362, в качестве платы управления пусковой установкой 2 может быть использована типовая процессорная плата формата /104- РСМ-3362, в качестве платы интерфейса 7 может быть использован типовой преобразователь РСМ-3680, в качестве внутренней локальной сети может быть использован типовой интерфейс. 2.0, отличающийся высокой помехозащищенностью за счет использования дифференциальных приемопередатчиков, в качестве внешней локальной сети может быть использован сетевой интерфейс типа эзернет. Плата управления силовыми следящими приводами по горизонтали и вертикали построена на базе микроконтроллера, на котором реализован алгоритм цифровой квазилинейной системы второго порядка - -регулятор (пропорционально интегродифференцирующий). Формирователь стартового сигнала представляет собой управляемый зарядно-разрядный емкостной накопитель с выходным блоком электронных ключей. Плата видеозахвата 9 может быть построена на базе микроконтроллера. Предложенное устройство позволяет повысить защищенность оператора за счет вынесения органов управления ПУ на безопасное расстояние от самой ПУ, автоматизировать процесс наведения ПУ на движущуюся цель и управления ракетой в полете, что позволяет снизить психофизические нагрузки на операторов, требования к их квалификации, а также сокращает время на их подготовку. В сравнении с прототипом предложенное техническое решение обеспечивает безопасное дистанционное управление переносной пусковой установкой переносного оборонительноштурмового ракетного комплекса при его боевой работе. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
Код ссылки
<a href="https://by.patents.su/5-u9589-puskovaya-ustanovka.html" rel="bookmark" title="База патентов Беларуси">Пусковая установка</a>
Мобильная пусковая установка
Номер патента: U 9131
Опубликовано: 30.04.2013
Авторы: Гарах Виктор Александрович, Николаев Юрий Иванович, Фирсаков Александр Анатольевич, Шаляпин Сергей Валентинович, Папушой Виталий Иванович
МПК: F41A 23/42
Метки: мобильная, установка, пусковая
Текст:
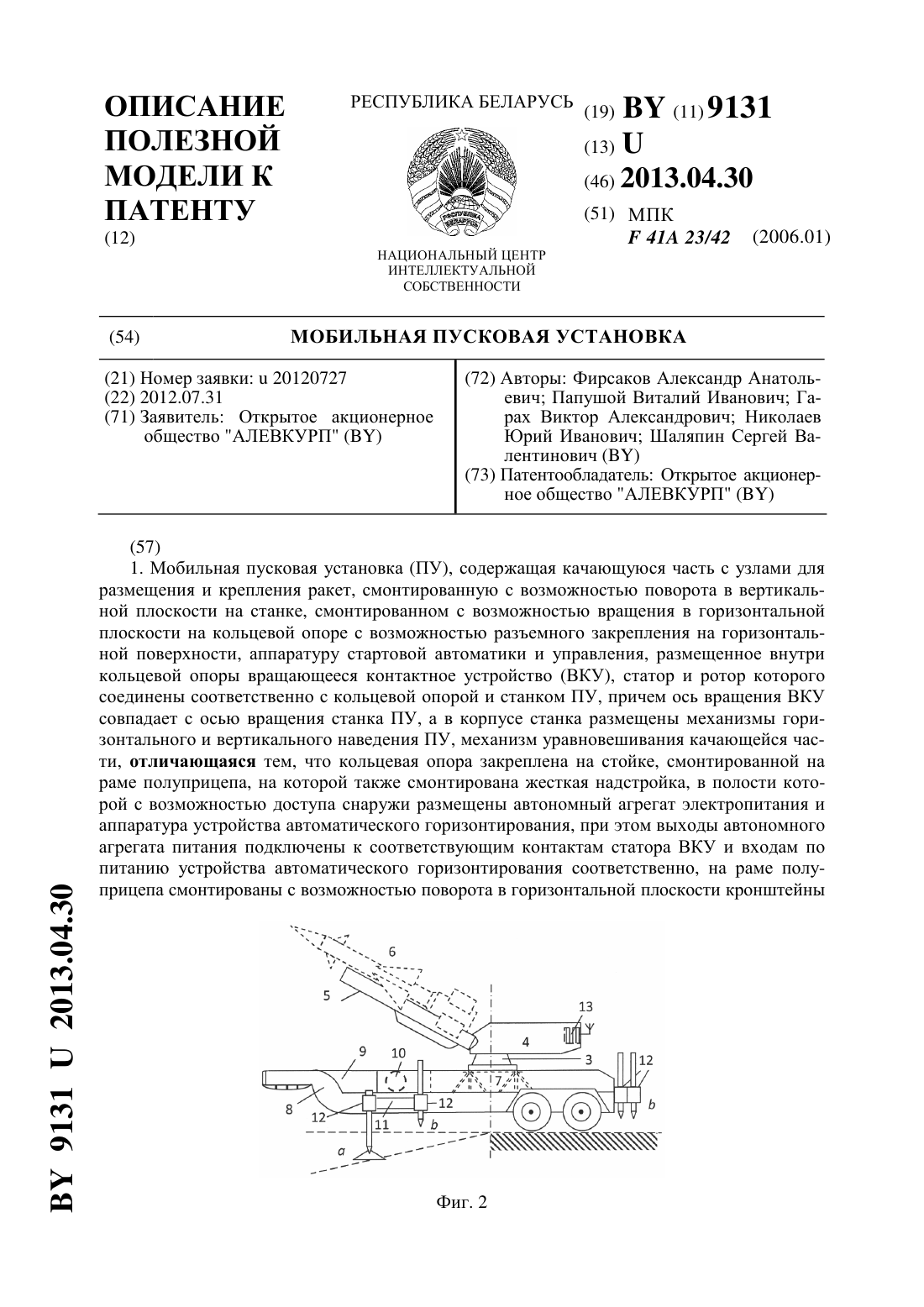
...кронштейны 11 устройства автоматического горизонтирования с электромеханическими исполнительными узлами 12, причем аппаратура стартовой автоматики и управления (не показано) размещена в корпусе станка 4, где также дополнительно установлен сопряженный с ней модем 13 линейной или (и) радиосвязи с пунктом управления ЗРК. При этом в заявляемой ПУ обеспечена возможность доступа снаружи к автономному агрегату 10 электропитания, аппаратуре устройства...
Самоходная пусковая установка
Номер патента: 14321
Опубликовано: 30.04.2011
Авторы: Царев Виктор Павлович, Полынкин Юрий Анатольевич, Конопляник Сергей Андреевич, Леонов Александр Георгиевич, Виноградов Сергей Михайлович, Мельников Валерий Юрьевич, Гончарук Игорь Анатольевич, Ботеновский Сергей Леонидович, Ничипорович Дмитрий Анатольевич, Белюстин Лев Владимирович, Буланников Владимир Владимирович
МПК: F41F 3/00
Метки: пусковая, установка, самоходная
Текст:
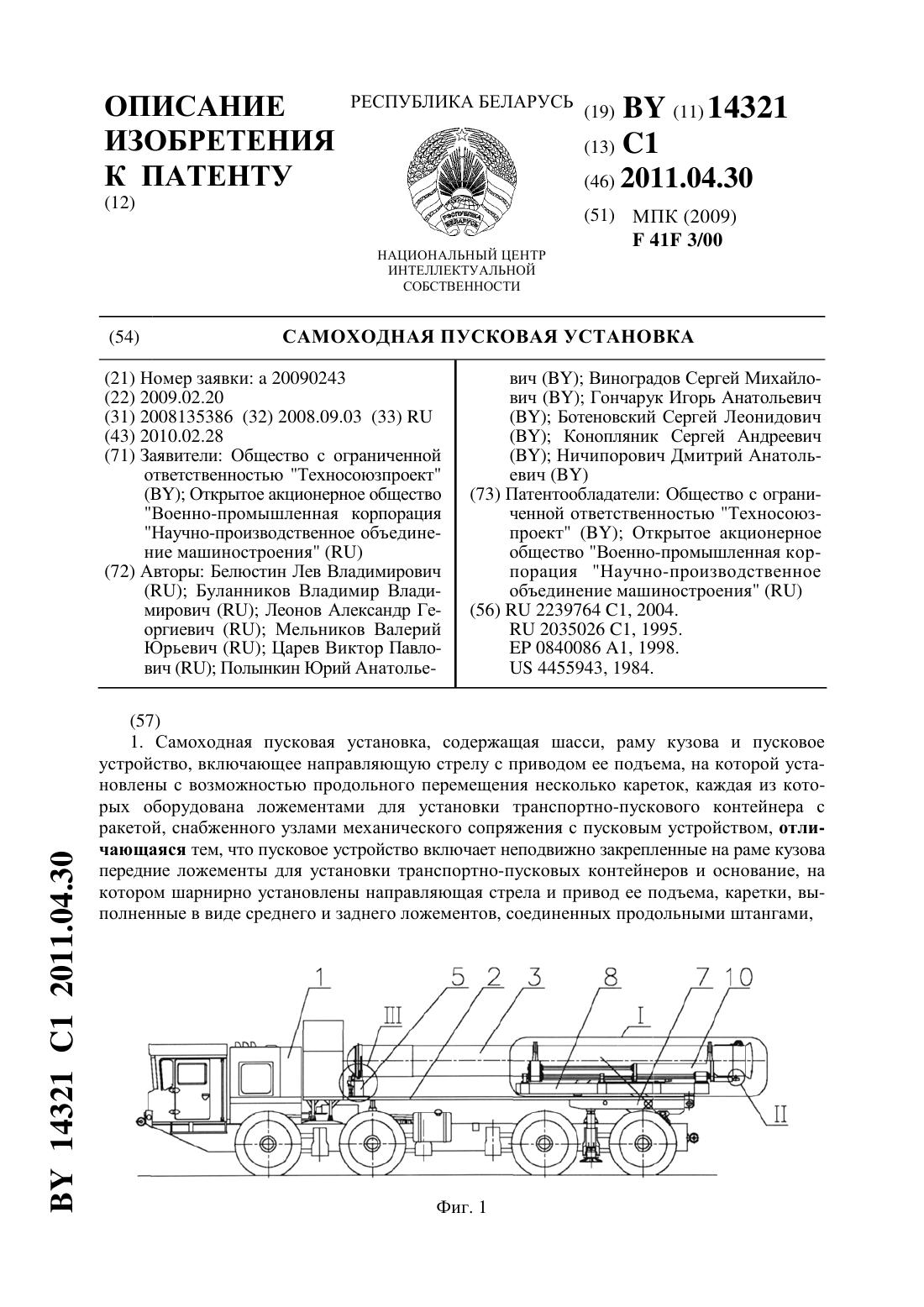
...с приводом, один захват которого взаимодействует с передним узлом механического сопряжения ТПК, а другой - с опорным элементом корпуса ракеты. При этом упомянутые узел механического сопряжения ТПК может быть выполнен в виде переднего фланца корпуса контейнера (например, аналогичного фланцу ТПК по заявке на изобретение 2007121564), а опорный элемент ракеты выполнен на наружной поверхности носового обтекателя (НО) ракеты, частично...
Мобильная колтюбинговая установка
Номер патента: U 6355
Опубликовано: 30.06.2010
Авторы: Басалай Григорий Антонович, Карачун Алёна Владимировна, Шваякова Надежда Сергеевна, Ревяков Павел Валерьевич
МПК: E21D 5/00, E21B 19/00
Метки: мобильная, установка, колтюбинговая
Текст:
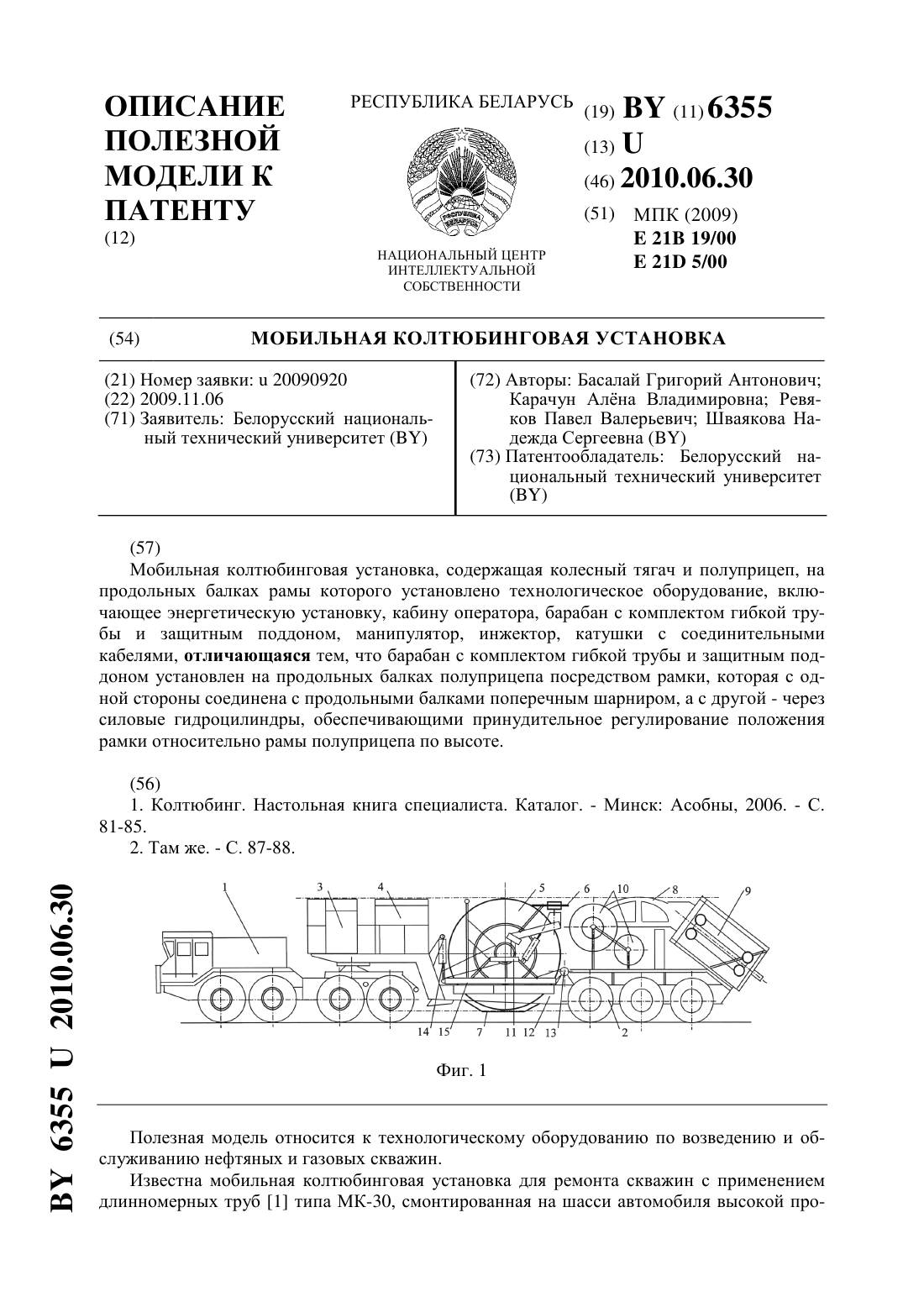
...установку сбоку в исходном положении рамки, на фиг. 2 - вид сбоку в повернутом положении рамки относительно рамы полуприцепа. Мобильная колтюбинговая установка содержит колесный тягач 1 и полуприцеп 2, на раме которого установлено технологическое оборудование, включающее энергетическую установку 3, кабину 4 оператора, барабан 5 с комплектом гибкой трубы 6 и защитным поддоном 7, манипулятор 8, инжектор 9, катушки 10 с соединительными...
Ранцевая установка импульсного пожаротушения
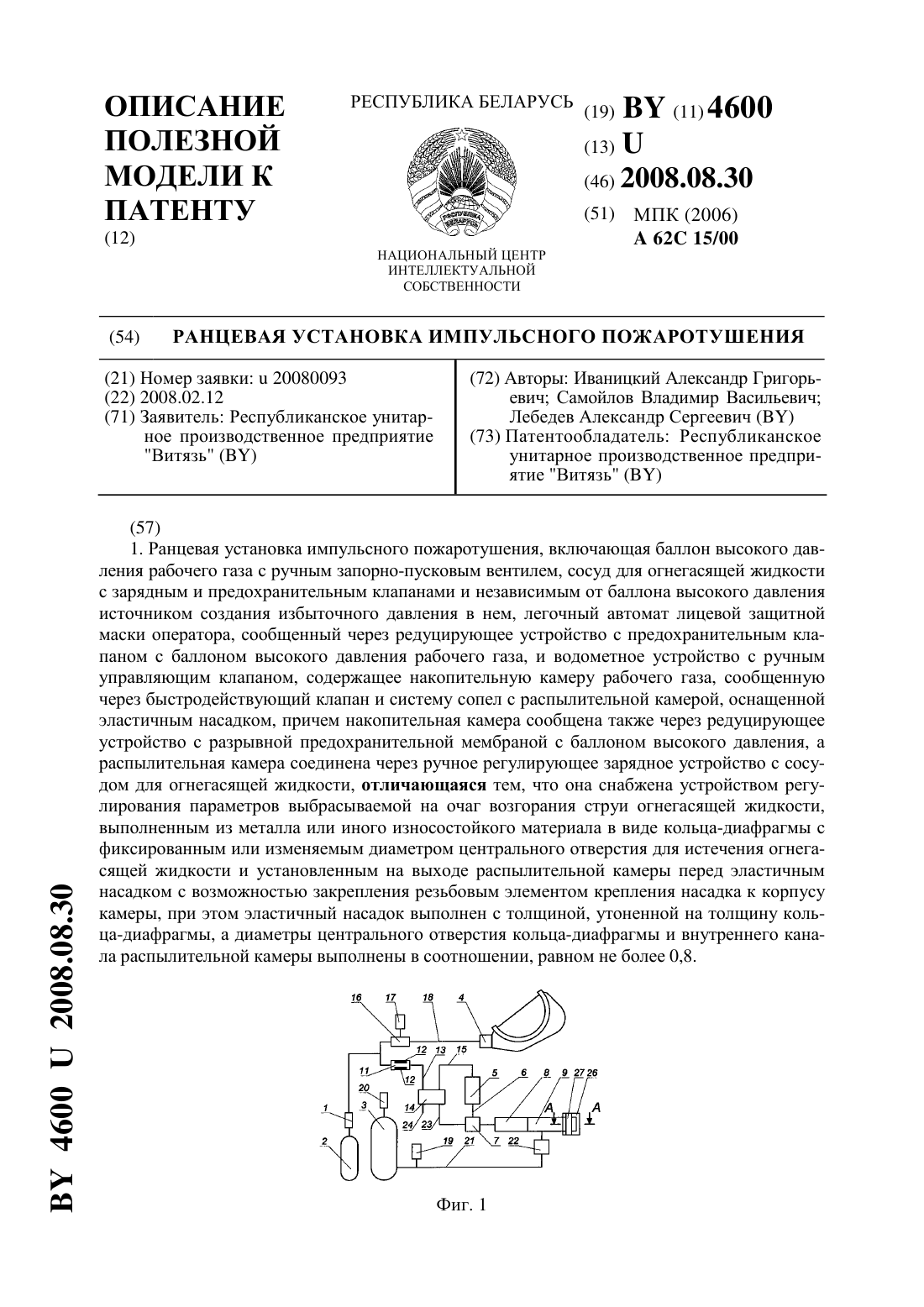
Номер патента: U 4600
Опубликовано: 30.08.2008
Авторы: Самойлов Владимир Васильевич, Иваницкий Александр Григорьевич, Лебедев Александр Сергеевич
МПК: A62C 15/00
Метки: установка, пожаротушения, импульсного, ранцевая
Текст:
...центрального отверстия кольца-диафрагмы. Сопоставительный анализ показывает, что предлагаемая установка отличается от прототипа наличием устройства регулирования параметров выбрасываемой струи огнегасящей жидкости, его установкой в распылительной камере и соотношением диаметров центрального отверстия кольца-диафрагмы и внутреннего канала камеры, что свидетельствует о наличии признаков, отличающих заявленную полезную модель от прототипа. В...
Система наведения телеуправляемой ракеты при ручном сопровождении цели
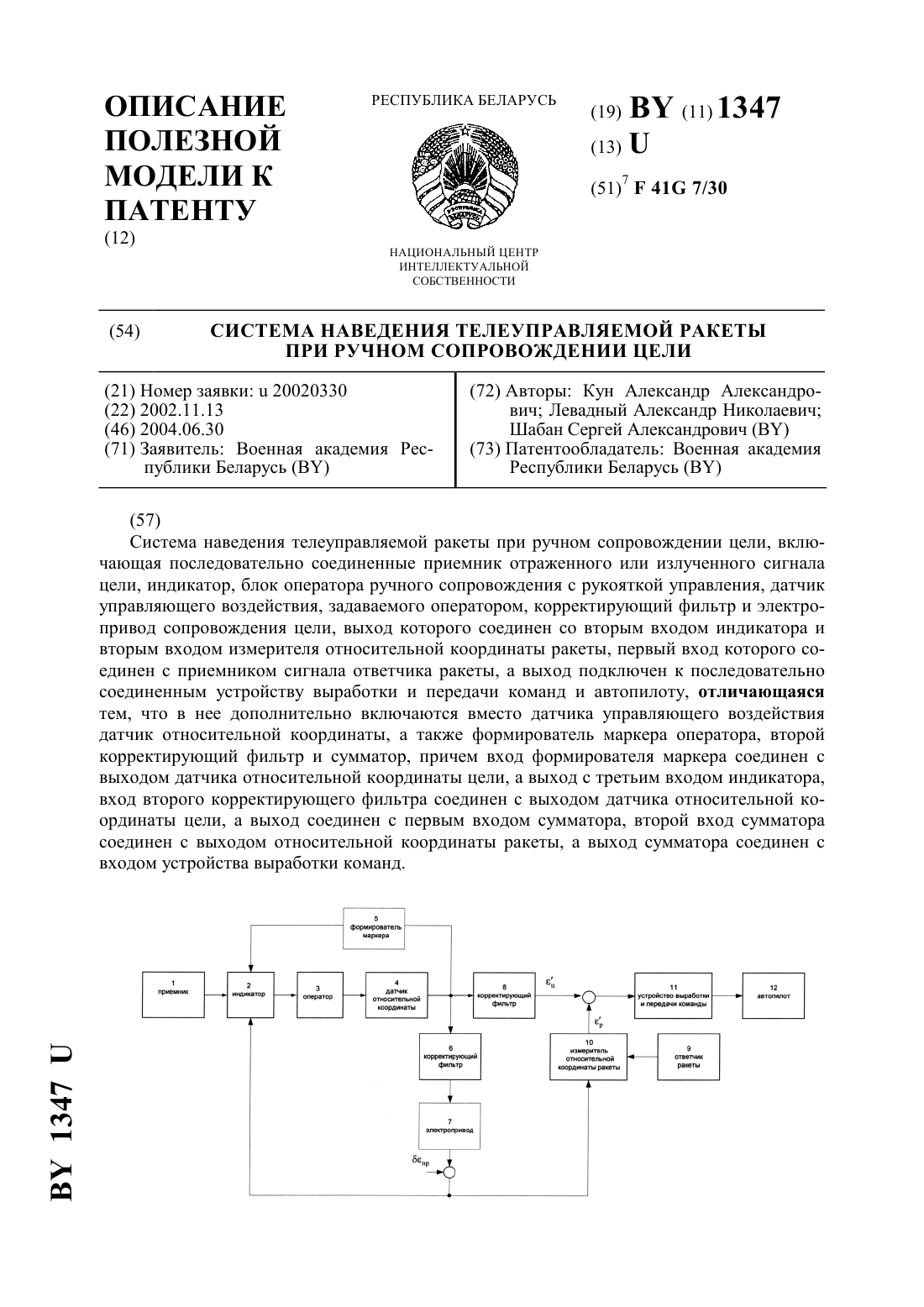
Номер патента: U 1347
Опубликовано: 30.06.2004
Авторы: Шабан Сергей Александрович, Кун Александр Александрович, Левадный Александр Николаевич
МПК: F41G 7/30
Метки: ручном, ракеты, система, сопровождении, наведения, цели, телеуправляемой
Текст:
...был отмечен выше ухудшение точности наведения за счет отработки системой управления возмущений привода сопровождения. Кроме того, в комплексе предусмотрен режим наведения ракеты при автоматическом сопровождении цели (АС) с радиолокационным каналом наблюдения. При постановке помех, как правило, необходимо переключаться на . Так как структурные схемы систем наведения при АС иразличны, возникает значительный переходной процесс, что также...
Предыдущий патент: Щетка-скребок
Следующий патент: Устройство для изготовления стент-элементов стент-графта из нитиноловой проволоки
Случайный патент: Датчик педали электронной