Мобильная пусковая установка
Номер патента: U 9131
Опубликовано: 30.04.2013
Авторы: Папушой Виталий Иванович, Гарах Виктор Александрович, Шаляпин Сергей Валентинович, Николаев Юрий Иванович, Фирсаков Александр Анатольевич

Текст
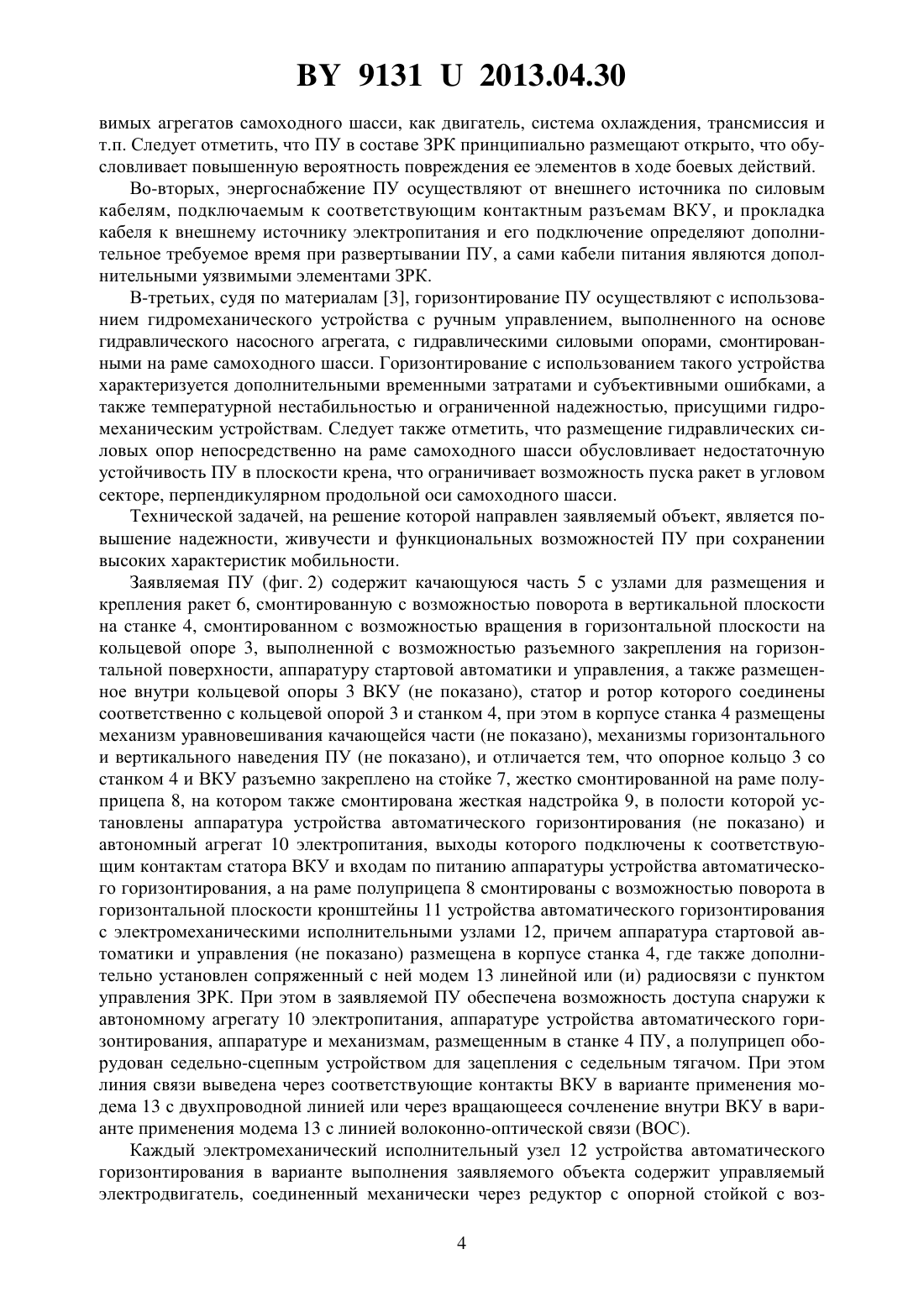
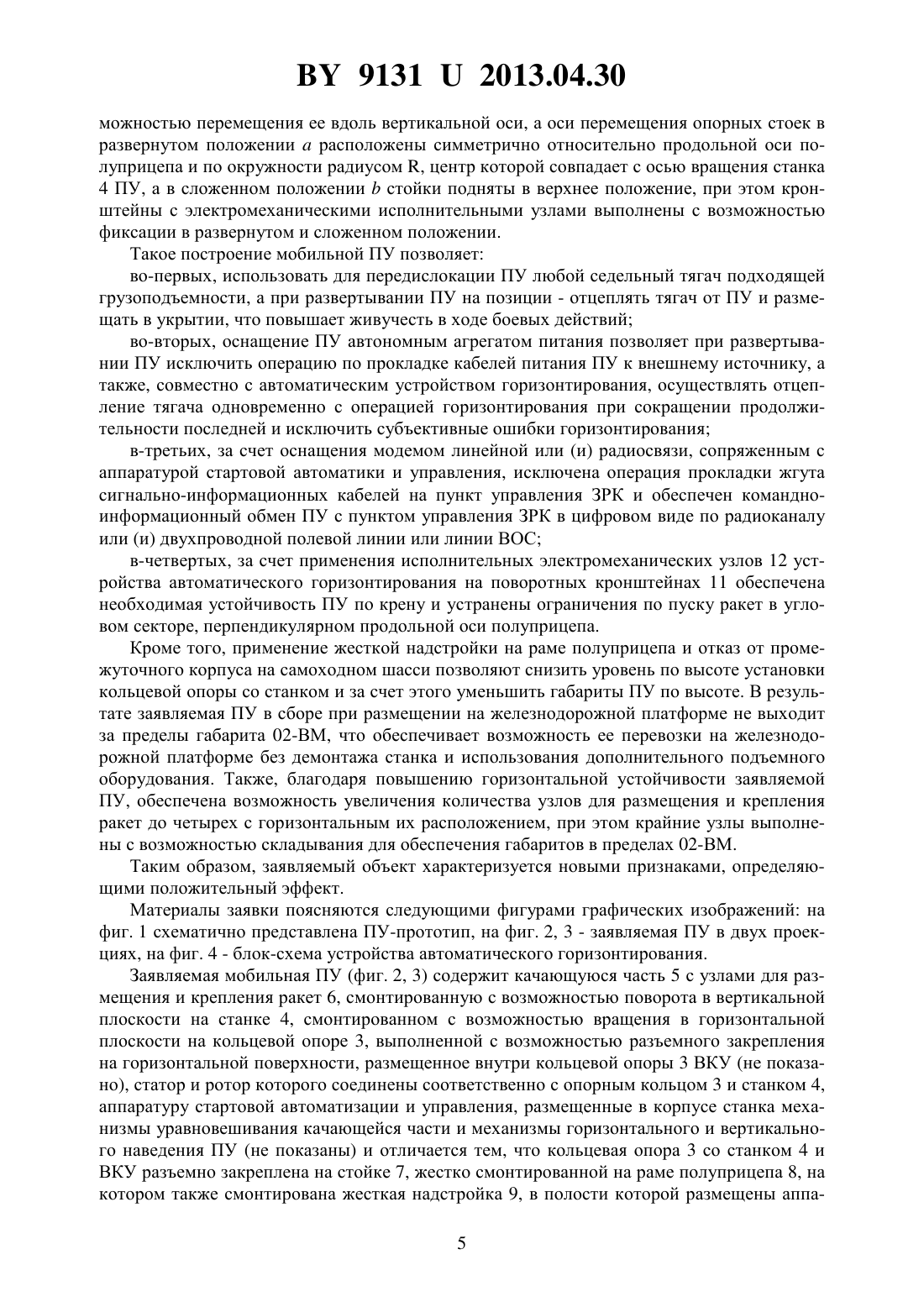
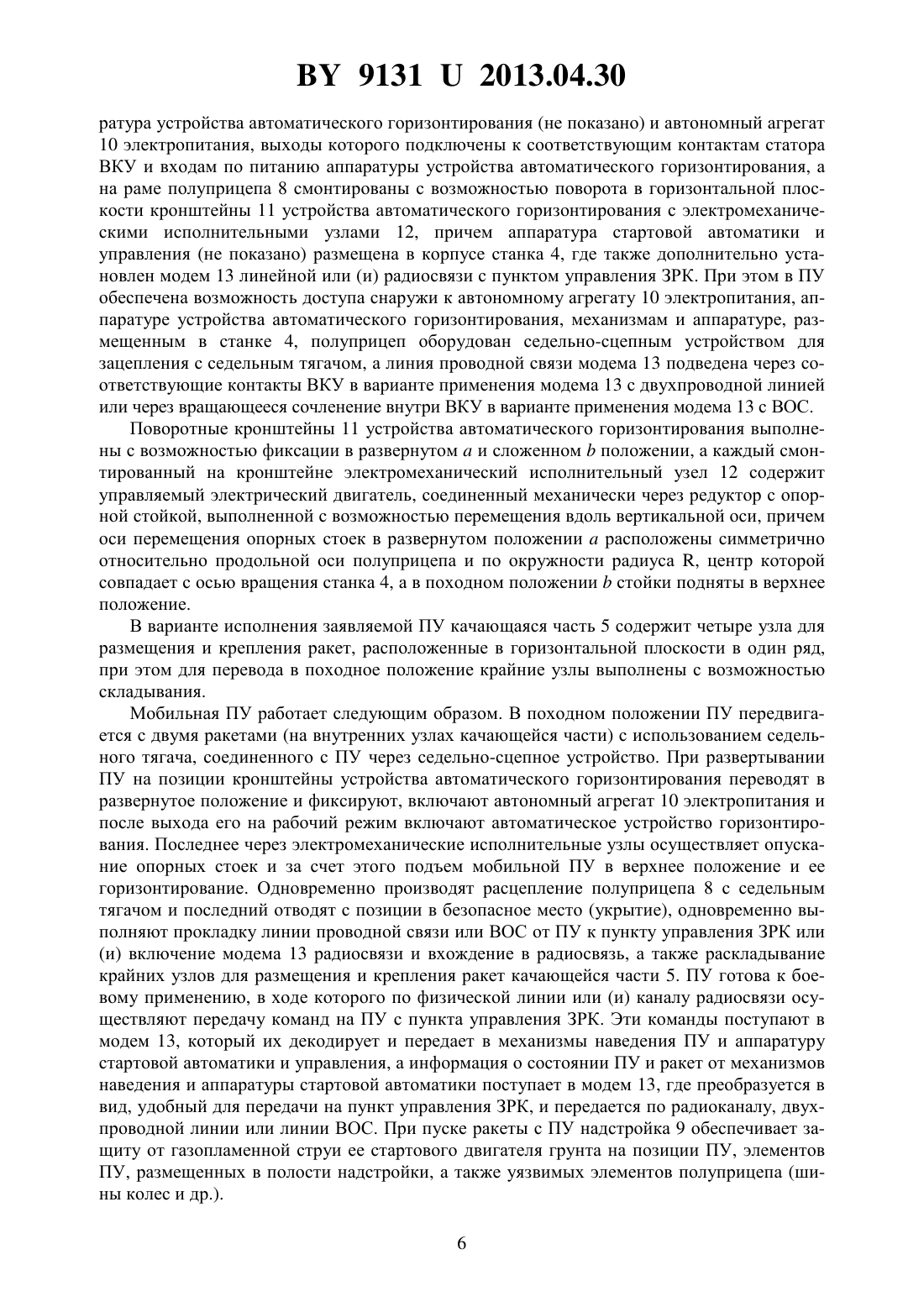
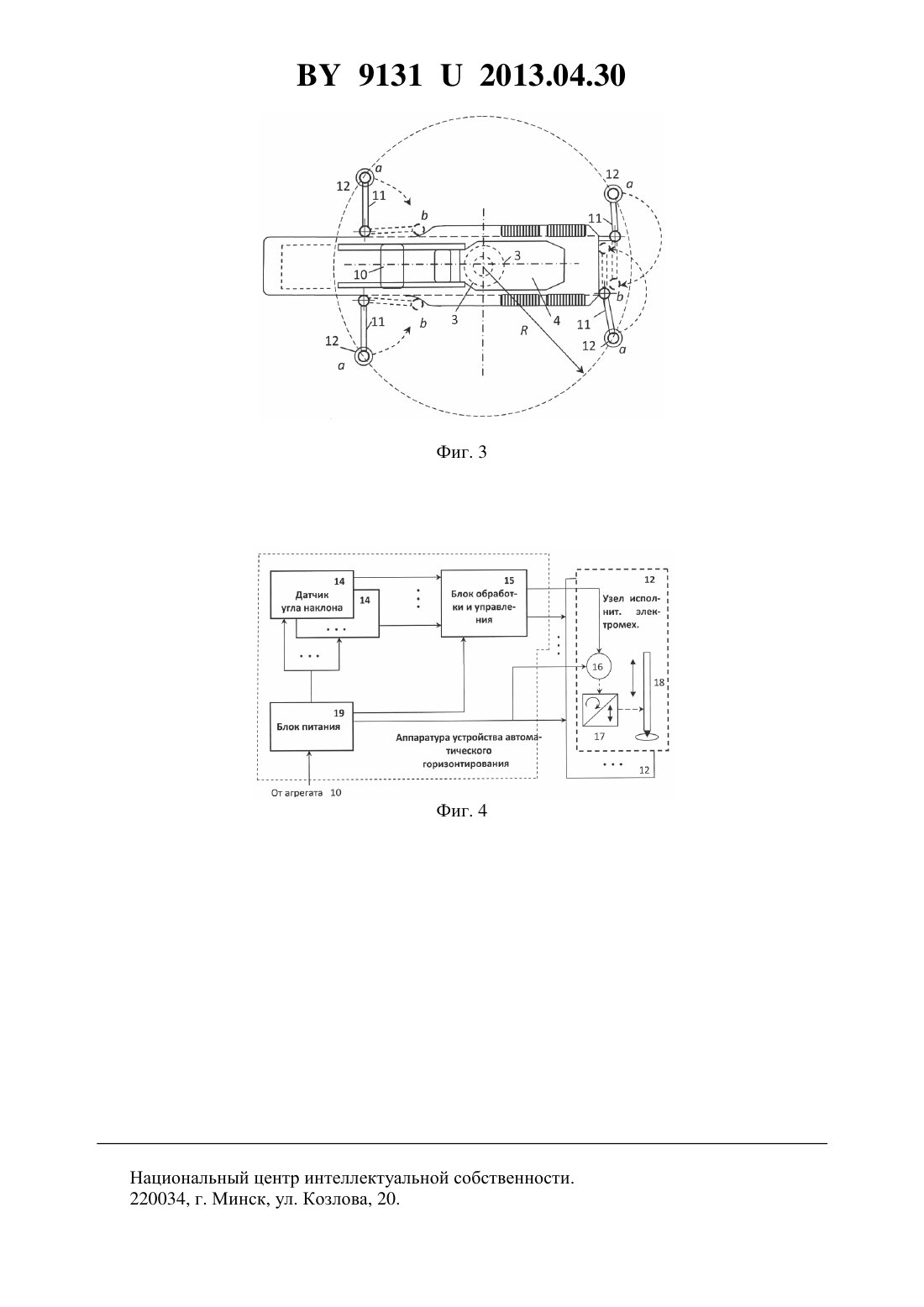
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Открытое акционерное общество АЛЕВКУРП(72) Авторы Фирсаков Александр Анатольевич Папушой Виталий Иванович Гарах Виктор Александрович Николаев Юрий Иванович Шаляпин Сергей Валентинович(73) Патентообладатель Открытое акционерное общество АЛЕВКУРП(57) 1. Мобильная пусковая установка (ПУ), содержащая качающуюся часть с узлами для размещения и крепления ракет, смонтированную с возможностью поворота в вертикальной плоскости на станке, смонтированном с возможностью вращения в горизонтальной плоскости на кольцевой опоре с возможностью разъемного закрепления на горизонтальной поверхности, аппаратуру стартовой автоматики и управления, размещенное внутри кольцевой опоры вращающееся контактное устройство (ВКУ), статор и ротор которого соединены соответственно с кольцевой опорой и станком ПУ, причем ось вращения ВКУ совпадает с осью вращения станка ПУ, а в корпусе станка размещены механизмы горизонтального и вертикального наведения ПУ, механизм уравновешивания качающейся части, отличающаяся тем, что кольцевая опора закреплена на стойке, смонтированной на раме полуприцепа, на которой также смонтирована жесткая надстройка, в полости которой с возможностью доступа снаружи размещены автономный агрегат электропитания и аппаратура устройства автоматического горизонтирования, при этом выходы автономного агрегата питания подключены к соответствующим контактам статора ВКУ и входам по питанию устройства автоматического горизонтирования соответственно, на раме полуприцепа смонтированы с возможностью поворота в горизонтальной плоскости кронштейны 91312013.04.30 автоматического устройства горизонтирования с электромеханическими исполнительными узлами, а в корпусе станка ПУ размещены с возможностью доступа снаружи аппаратура стартовой автоматики и управления и сопряженный с нею модем линейной или (и) радиосвязи. 2. Мобильная ПУ по п. 1, отличающаяся тем, что кронштейны устройства автоматического горизонтирования выполнены с возможностью фиксации в развернутом и сложенном положении, а на этих кронштейнах смонтированы исполнительные электромеханические узлы, содержащие электродвигатели, соединенные через редукторы с опорными стойками, имеющими возможность перемещения вдоль вертикальной оси, причем в развернутом положении оси перемещения этих опорных стоек расположены симметрично оси полуприцепа и по окружности, центр которой совпадает с осью вращения станка ПУ. 3. Мобильная ПУ по п. 1, отличающаяся тем, что качающаяся часть содержит четыре узла для размещения и крепления ракет, расположенные в горизонтальной плоскости, при этом крайние узлы для перевода в походное положение выполнены с возможностью складывания.(56) 1. Пусковая установка 5 П 73. Техническое описание и инструкция по эксплуатации. Ч. 1. Техническое описание. Изд. 2-е. - М. Воениздат, 1981. 2. Зенитный ракетный дивизион С-125. Инструкция по эксплуатации ПК 1.002.006.ИЭ,1961. 3. Патент РФ 2312294, 2005. 4. Минский завод колесных тягачей. Продукция. Полуприцепы. Найдено в Интернет Заявляемый объект относится к ракетной технике, в частности к пусковым установкам(ПУ) зенитных ракет. Известна мобильная (буксируемая) ПУ 5 П 73 1 зенитного ракетного комплекса (ЗРК) С-125 М. Данная ПУ содержит основание с установленной на нем на шаровых опорах платформой, на которой с возможностью вращения в горизонтальной плоскости установлен станок ПУ, на котором с возможностью поворота в вертикальной плоскости смонтирована качающаяся часть с узлами для размещения и крепления ракет в боевом положении. В корпусе станка размещены механизмы горизонтального и вертикального наведения ПУ, механизм уравновешивания качающейся части, аппаратура стартовой автоматики и управления. При этом станок соединен с платформой через шаровый погон,внутри которого размещено вращающееся контактное устройство (ВКУ), статор которого соединен с платформой, а ротор - со станком, причем платформа соединена с основанием тремя шаровыми опорами, две из которых выполнены с возможностью ручного горизонтирования станка ПУ. Для перевозки ПУ, а также перевода из походного положения в боевое (развертывания) и обратно (свертывания) в состав ПУ входят две двухколесные ходовые тележки с домкратами для подъема и опускания основания ПУ, причем передняя 2 91312013.04.30 ходовая тележка оснащена дышлом для зацепления с тягачом ПУ в походном положении. Для защиты грунта вокруг ПУ от эрозии газопламенной струей стартового двигателя ракеты в состав ПУ также входит грунтозащита, состоящая из специальных листовых настилов, которые закрепляют к основанию ПУ, соединяют друг с другом и фиксируют на грунте замками, штангами и резьбовыми соединениями. Электропитание ПУ осуществляют от внешнего источника трехфазным напряжением 220 В / 50 Гц и однофазным напряжением 220 В / 400 Гц с использованием кабельных линий, подключаемых к контактным разъемам статора ВКУ. Также через ВКУ осуществляют передачу в аппаратуру ПУ команд управления от пункта управления ЗРК и информационных сигналов состояния ПУ и ракет на пункт управления ЗРК с использованием жгута сигнально-информационных кабелей. Развертывание такой ПУ возможно на заранее подготовленной в инженерном отношении позиции. При развертывании ПУ согласно 2 основание ПУ с платформой и станком опускают на грунт с помощью ручных винтовых домкратов ходовых тележек, после чего ходовые тележки отсоединяют от основания ПУ и откатывают на безопасное расстояние. Затем к лежащему на грунте основанию закрепляют элементы грунтозащиты, соединяют их между собой и фиксируют на грунте. После этого ПУ начинают непосредственно готовить к боевому применению, горизонтируют посредством регулировки шаровых опор платформы, прокладывают и подключают кабели питания и сигнально-информационные кабели, устанавливают ракеты. Свертывание ПУ производят в обратном порядке. Основными недостатками такой ПУ являются необходимость заблаговременной подготовки стартовой позиции в инженерном отношении большое количество и трудоемкость операций по развертыванию (свертыванию) ПУ,обусловливающие значительное время их выполнения и определяющие низкие показатели мобильности ПУ и ЗРК в целом. Указанные недостатки устранены в пусковой установке 3, которая является наиболее близким аналогом заявляемого объекта (прототипом). Данная ПУ (фиг. 1) содержит самоходное колесное шасси 1, на раме которого посредством трех опорных узлов установлен промежуточный корпус 2, на котором разъемно закреплена кольцевая опора 3, на которой с возможностью вращения в горизонтальной плоскости смонтирован станок 4 ПУ с качающейся частью 5, смонтированной на станке с возможностью поворота в вертикальной плоскости и содержащей узлы для размещения и крепления двух ракет 6. При этом промежуточный корпус 2 выполнен с возможностью размещения внутри него оборудования и аппаратуры ПУ с возможностью доступа с наружной стороны, причем наружные поверхности верхней задней и боковых стенок промежуточного корпуса выполняют функцию газоотражающих поверхностей при старте ракет, ПУ снабжена устройством фиксации взаимного положения промежуточного корпуса 2 и станка 4 в походном положении ПУ. Электропитание и сигнально-информационный обмен аппаратуры, размещенной на станке, осуществлены через ВКУ, размещенное внутри кольцевой опоры 3 и соосное с осью вращения станка 4, защищенное герметизирующим кольцевым уплотнением. Такая ПУ способна в походном положении передвигаться с ракетами по дорогам, не требует монтажа грунтозащиты и использования ходовых тележек. Эти достоинства обусловливают существенное повышение показателей мобильности ПУ - сокращение времени развертывания и свертывания одновременно с улучшением эксплуатационных возможностей ПУ. Вместе с тем ПУ-прототип имеет ряд слабых сторон. Во-первых, невозможность передислокации ПУ при смене позиции ЗРК в случае выхода из строя (в результате поломки или повреждения в ходе боевых действий) таких уяз 3 91312013.04.30 вимых агрегатов самоходного шасси, как двигатель, система охлаждения, трансмиссия и т.п. Следует отметить, что ПУ в составе ЗРК принципиально размещают открыто, что обусловливает повышенную вероятность повреждения ее элементов в ходе боевых действий. Во-вторых, энергоснабжение ПУ осуществляют от внешнего источника по силовым кабелям, подключаемым к соответствующим контактным разъемам ВКУ, и прокладка кабеля к внешнему источнику электропитания и его подключение определяют дополнительное требуемое время при развертывании ПУ, а сами кабели питания являются дополнительными уязвимыми элементами ЗРК. В-третьих, судя по материалам 3, горизонтирование ПУ осуществляют с использованием гидромеханического устройства с ручным управлением, выполненного на основе гидравлического насосного агрегата, с гидравлическими силовыми опорами, смонтированными на раме самоходного шасси. Горизонтирование с использованием такого устройства характеризуется дополнительными временными затратами и субъективными ошибками, а также температурной нестабильностью и ограниченной надежностью, присущими гидромеханическим устройствам. Следует также отметить, что размещение гидравлических силовых опор непосредственно на раме самоходного шасси обусловливает недостаточную устойчивость ПУ в плоскости крена, что ограничивает возможность пуска ракет в угловом секторе, перпендикулярном продольной оси самоходного шасси. Технической задачей, на решение которой направлен заявляемый объект, является повышение надежности, живучести и функциональных возможностей ПУ при сохранении высоких характеристик мобильности. Заявляемая ПУ (фиг. 2) содержит качающуюся часть 5 с узлами для размещения и крепления ракет 6, смонтированную с возможностью поворота в вертикальной плоскости на станке 4, смонтированном с возможностью вращения в горизонтальной плоскости на кольцевой опоре 3, выполненной с возможностью разъемного закрепления на горизонтальной поверхности, аппаратуру стартовой автоматики и управления, а также размещенное внутри кольцевой опоры 3 ВКУ (не показано), статор и ротор которого соединены соответственно с кольцевой опорой 3 и станком 4, при этом в корпусе станка 4 размещены механизм уравновешивания качающейся части (не показано), механизмы горизонтального и вертикального наведения ПУ (не показано), и отличается тем, что опорное кольцо 3 со станком 4 и ВКУ разъемно закреплено на стойке 7, жестко смонтированной на раме полуприцепа 8, на котором также смонтирована жесткая надстройка 9, в полости которой установлены аппаратура устройства автоматического горизонтирования (не показано) и автономный агрегат 10 электропитания, выходы которого подключены к соответствующим контактам статора ВКУ и входам по питанию аппаратуры устройства автоматического горизонтирования, а на раме полуприцепа 8 смонтированы с возможностью поворота в горизонтальной плоскости кронштейны 11 устройства автоматического горизонтирования с электромеханическими исполнительными узлами 12, причем аппаратура стартовой автоматики и управления (не показано) размещена в корпусе станка 4, где также дополнительно установлен сопряженный с ней модем 13 линейной или (и) радиосвязи с пунктом управления ЗРК. При этом в заявляемой ПУ обеспечена возможность доступа снаружи к автономному агрегату 10 электропитания, аппаратуре устройства автоматического горизонтирования, аппаратуре и механизмам, размещенным в станке 4 ПУ, а полуприцеп оборудован седельно-сцепным устройством для зацепления с седельным тягачом. При этом линия связи выведена через соответствующие контакты ВКУ в варианте применения модема 13 с двухпроводной линией или через вращающееся сочленение внутри ВКУ в варианте применения модема 13 с линией волоконно-оптической связи (ВОС). Каждый электромеханический исполнительный узел 12 устройства автоматического горизонтирования в варианте выполнения заявляемого объекта содержит управляемый электродвигатель, соединенный механически через редуктор с опорной стойкой с воз 4 91312013.04.30 можностью перемещения ее вдоль вертикальной оси, а оси перемещения опорных стоек в развернутом положениирасположены симметрично относительно продольной оси полуприцепа и по окружности радиусом , центр которой совпадает с осью вращения станка 4 ПУ, а в сложенном положениистойки подняты в верхнее положение, при этом кронштейны с электромеханическими исполнительными узлами выполнены с возможностью фиксации в развернутом и сложенном положении. Такое построение мобильной ПУ позволяет во-первых, использовать для передислокации ПУ любой седельный тягач подходящей грузоподъемности, а при развертывании ПУ на позиции - отцеплять тягач от ПУ и размещать в укрытии, что повышает живучесть в ходе боевых действий во-вторых, оснащение ПУ автономным агрегатом питания позволяет при развертывании ПУ исключить операцию по прокладке кабелей питания ПУ к внешнему источнику, а также, совместно с автоматическим устройством горизонтирования, осуществлять отцепление тягача одновременно с операцией горизонтирования при сокращении продолжительности последней и исключить субъективные ошибки горизонтирования в-третьих, за счет оснащения модемом линейной или (и) радиосвязи, сопряженным с аппаратурой стартовой автоматики и управления, исключена операция прокладки жгута сигнально-информационных кабелей на пункт управления ЗРК и обеспечен командноинформационный обмен ПУ с пунктом управления ЗРК в цифровом виде по радиоканалу или (и) двухпроводной полевой линии или линии ВОС в-четвертых, за счет применения исполнительных электромеханических узлов 12 устройства автоматического горизонтирования на поворотных кронштейнах 11 обеспечена необходимая устойчивость ПУ по крену и устранены ограничения по пуску ракет в угловом секторе, перпендикулярном продольной оси полуприцепа. Кроме того, применение жесткой надстройки на раме полуприцепа и отказ от промежуточного корпуса на самоходном шасси позволяют снизить уровень по высоте установки кольцевой опоры со станком и за счет этого уменьшить габариты ПУ по высоте. В результате заявляемая ПУ в сборе при размещении на железнодорожной платформе не выходит за пределы габарита 02-ВМ, что обеспечивает возможность ее перевозки на железнодорожной платформе без демонтажа станка и использования дополнительного подъемного оборудования. Также, благодаря повышению горизонтальной устойчивости заявляемой ПУ, обеспечена возможность увеличения количества узлов для размещения и крепления ракет до четырех с горизонтальным их расположением, при этом крайние узлы выполнены с возможностью складывания для обеспечения габаритов в пределах 02-ВМ. Таким образом, заявляемый объект характеризуется новыми признаками, определяющими положительный эффект. Материалы заявки поясняются следующими фигурами графических изображений на фиг. 1 схематично представлена ПУ-прототип, на фиг. 2, 3 - заявляемая ПУ в двух проекциях, на фиг. 4 - блок-схема устройства автоматического горизонтирования. Заявляемая мобильная ПУ (фиг. 2, 3) содержит качающуюся часть 5 с узлами для размещения и крепления ракет 6, смонтированную с возможностью поворота в вертикальной плоскости на станке 4, смонтированном с возможностью вращения в горизонтальной плоскости на кольцевой опоре 3, выполненной с возможностью разъемного закрепления на горизонтальной поверхности, размещенное внутри кольцевой опоры 3 ВКУ (не показано), статор и ротор которого соединены соответственно с опорным кольцом 3 и станком 4,аппаратуру стартовой автоматизации и управления, размещенные в корпусе станка механизмы уравновешивания качающейся части и механизмы горизонтального и вертикального наведения ПУ (не показаны) и отличается тем, что кольцевая опора 3 со станком 4 и ВКУ разъемно закреплена на стойке 7, жестко смонтированной на раме полуприцепа 8, на котором также смонтирована жесткая надстройка 9, в полости которой размещены аппа 5 91312013.04.30 ратура устройства автоматического горизонтирования (не показано) и автономный агрегат 10 электропитания, выходы которого подключены к соответствующим контактам статора ВКУ и входам по питанию аппаратуры устройства автоматического горизонтирования, а на раме полуприцепа 8 смонтированы с возможностью поворота в горизонтальной плоскости кронштейны 11 устройства автоматического горизонтирования с электромеханическими исполнительными узлами 12, причем аппаратура стартовой автоматики и управления (не показано) размещена в корпусе станка 4, где также дополнительно установлен модем 13 линейной или (и) радиосвязи с пунктом управления ЗРК. При этом в ПУ обеспечена возможность доступа снаружи к автономному агрегату 10 электропитания, аппаратуре устройства автоматического горизонтирования, механизмам и аппаратуре, размещенным в станке 4, полуприцеп оборудован седельно-сцепным устройством для зацепления с седельным тягачом, а линия проводной связи модема 13 подведена через соответствующие контакты ВКУ в варианте применения модема 13 с двухпроводной линией или через вращающееся сочленение внутри ВКУ в варианте применения модема 13 с ВОС. Поворотные кронштейны 11 устройства автоматического горизонтирования выполнены с возможностью фиксации в развернутоми сложенномположении, а каждый смонтированный на кронштейне электромеханический исполнительный узел 12 содержит управляемый электрический двигатель, соединенный механически через редуктор с опорной стойкой, выполненной с возможностью перемещения вдоль вертикальной оси, причем оси перемещения опорных стоек в развернутом положениирасположены симметрично относительно продольной оси полуприцепа и по окружности радиуса , центр которой совпадает с осью вращения станка 4, а в походном положениистойки подняты в верхнее положение. В варианте исполнения заявляемой ПУ качающаяся часть 5 содержит четыре узла для размещения и крепления ракет, расположенные в горизонтальной плоскости в один ряд,при этом для перевода в походное положение крайние узлы выполнены с возможностью складывания. Мобильная ПУ работает следующим образом. В походном положении ПУ передвигается с двумя ракетами (на внутренних узлах качающейся части) с использованием седельного тягача, соединенного с ПУ через седельно-сцепное устройство. При развертывании ПУ на позиции кронштейны устройства автоматического горизонтирования переводят в развернутое положение и фиксируют, включают автономный агрегат 10 электропитания и после выхода его на рабочий режим включают автоматическое устройство горизонтирования. Последнее через электромеханические исполнительные узлы осуществляет опускание опорных стоек и за счет этого подъем мобильной ПУ в верхнее положение и ее горизонтирование. Одновременно производят расцепление полуприцепа 8 с седельным тягачом и последний отводят с позиции в безопасное место (укрытие), одновременно выполняют прокладку линии проводной связи или ВОС от ПУ к пункту управления ЗРК или(и) включение модема 13 радиосвязи и вхождение в радиосвязь, а также раскладывание крайних узлов для размещения и крепления ракет качающейся части 5. ПУ готова к боевому применению, в ходе которого по физической линии или (и) каналу радиосвязи осуществляют передачу команд на ПУ с пункта управления ЗРК. Эти команды поступают в модем 13, который их декодирует и передает в механизмы наведения ПУ и аппаратуру стартовой автоматики и управления, а информация о состоянии ПУ и ракет от механизмов наведения и аппаратуры стартовой автоматики поступает в модем 13, где преобразуется в вид, удобный для передачи на пункт управления ЗРК, и передается по радиоканалу, двухпроводной линии или линии ВОС. При пуске ракеты с ПУ надстройка 9 обеспечивает защиту от газопламенной струи ее стартового двигателя грунта на позиции ПУ, элементов ПУ, размещенных в полости надстройки, а также уязвимых элементов полуприцепа (шины колес и др.). 6 91312013.04.30 При наличии запаса по времени на ПУ дополнительно могут быть установлены две ракеты, размещаемые и закрепляемые на крайних узлах для размещения и крепления ракет с использованием транспортно-заряжающей машины. Таким образом, обеспечиваются высокие показатели мобильности и живучести ПУ, а также удобство эксплуатации. Техническая реализация заявляемого объекта обеспечивается с использованием известных технических решений полуприцеп 8 с седельно-сцепным устройством является известным объектом 4 автономный агрегат 10 электропитания также известное и серийно выпускаемое устройство 5 модемы линейной и радиосвязи - известные устройства 6, широко применяемые в технике электронных коммуникаций аппаратура стартовой автоматики и управления, механизмы уравновешивания качающейся части, вертикального и горизонтального наведения ПУ выполняются аналогично 1, 3. В варианте исполнения заявляемой ПУ сохранена возможность размещения четырех узлов для размещения и крепления ракет на качающейся части аналогично 1, причем крайние узлы выполнены с возможностью складывания для обеспечения габаритов ПУ в походном положении в пределах 02-ВМ. В варианте выполнения мобильной ПУ устройство автоматического горизонтирования(фиг. 4) содержит не менее двух датчиков 14 угла наклона, выходы которых подключены к соответствующим входам блока 15 обработки и управления, управляющие выходы которого подключены к соответствующим входамэлектродвигателей 16 электромеханических исполнительных узлов 12, размещенных наповоротных кронштейнах 11, при этом механические выходы электродвигателей через редукторы 17 соединены с опорными стойками 18 с возможностью перемещения вдоль вертикальной оси. При этом входы по питанию блоков 14, 15, 16 соединены с соответствующими выходами блока питания 19,входные контакты которого подключены к выходам автономного агрегата 10 питания ПУ,а датчики 14 угла наклона, блок 15 обработки и управления с блоком 19 питания образуют аппаратуру устройства автоматического горизонтирования. Датчики 14 угла наклона 7 и другие элементы устройства автоматического горизонтирования - известные устройства и строятся по известным методам. Таким образом, заявляемый объект удовлетворяет критерию промышленная применимость, обладает новизной и характеризуется положительным эффектом. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: F41A 23/42
Метки: пусковая, установка, мобильная
Код ссылки
<a href="https://by.patents.su/8-u9131-mobilnaya-puskovaya-ustanovka.html" rel="bookmark" title="База патентов Беларуси">Мобильная пусковая установка</a>
Мобильная колтюбинговая установка
Номер патента: U 6355
Опубликовано: 30.06.2010
Авторы: Басалай Григорий Антонович, Карачун Алёна Владимировна, Шваякова Надежда Сергеевна, Ревяков Павел Валерьевич
МПК: E21B 19/00, E21D 5/00
Метки: колтюбинговая, мобильная, установка
Текст:
...установку сбоку в исходном положении рамки, на фиг. 2 - вид сбоку в повернутом положении рамки относительно рамы полуприцепа. Мобильная колтюбинговая установка содержит колесный тягач 1 и полуприцеп 2, на раме которого установлено технологическое оборудование, включающее энергетическую установку 3, кабину 4 оператора, барабан 5 с комплектом гибкой трубы 6 и защитным поддоном 7, манипулятор 8, инжектор 9, катушки 10 с соединительными...
Мобильная колтюбинговая установка
Номер патента: 15559
Опубликовано: 28.02.2012
Автор: Басалай Григорий Антонович
МПК: E21C 19/22
Метки: установка, мобильная, колтюбинговая
Текст:
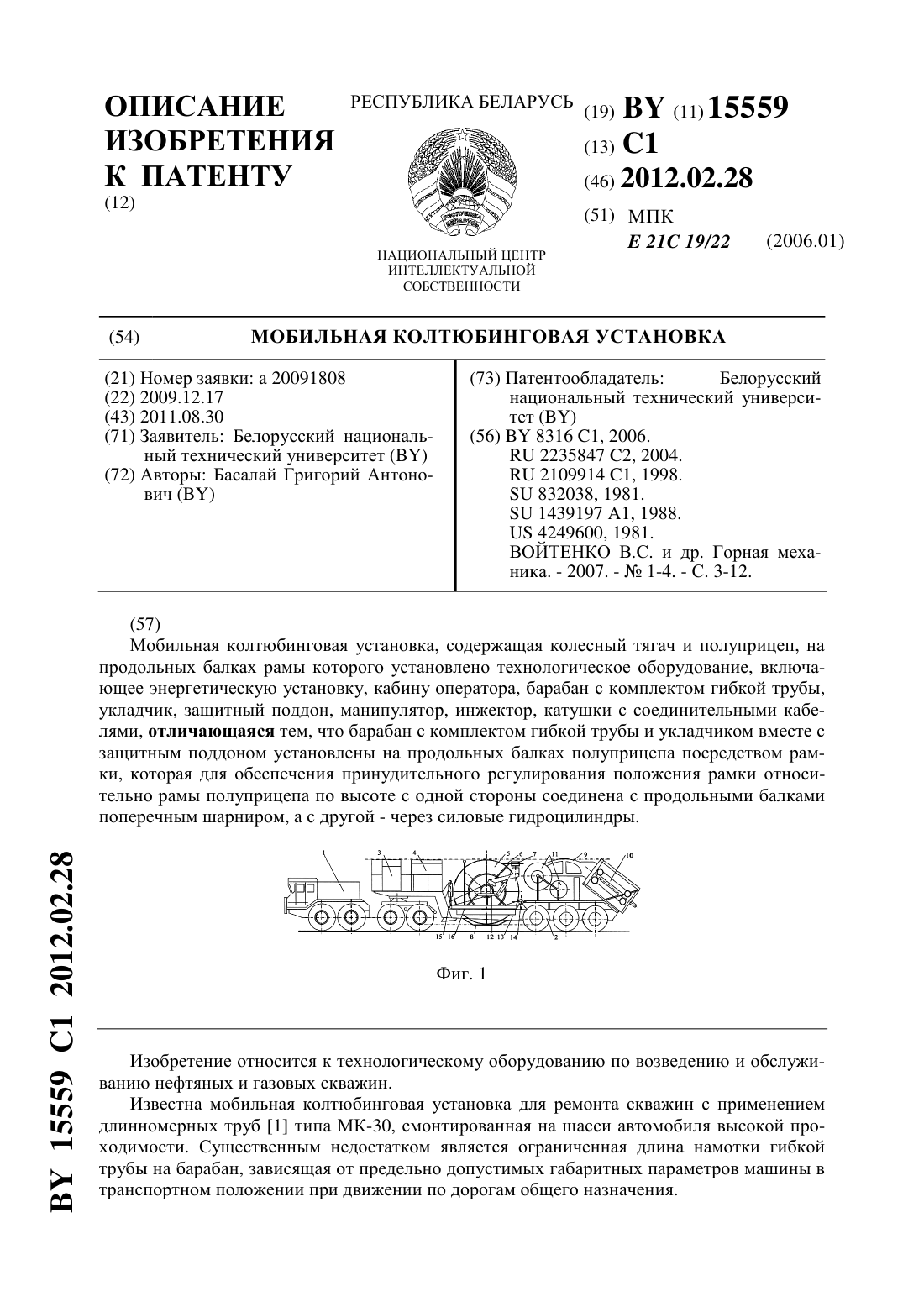
...колтюбинговая установка содержит колесный тягач 1 и полуприцеп 2, на раме которого установлено технологическое оборудование, включающее энергетическую установку 3, кабину 4 оператора, барабан 5 с комплектом гибкой трубы 6, укладчик 7, защитный поддон 8, манипулятор 9, инжектор 10, катушки 11 с соединительными кабелями. Барабан 5 с комплектом гибкой трубы 6, укладчик 7 и защитный поддон 8 установлены посредством рамки 12 на продольных...
Самоходная пусковая установка
Номер патента: 14321
Опубликовано: 30.04.2011
Авторы: Ничипорович Дмитрий Анатольевич, Буланников Владимир Владимирович, Гончарук Игорь Анатольевич, Ботеновский Сергей Леонидович, Конопляник Сергей Андреевич, Леонов Александр Георгиевич, Царев Виктор Павлович, Полынкин Юрий Анатольевич, Мельников Валерий Юрьевич, Виноградов Сергей Михайлович, Белюстин Лев Владимирович
МПК: F41F 3/00
Метки: установка, самоходная, пусковая
Текст:
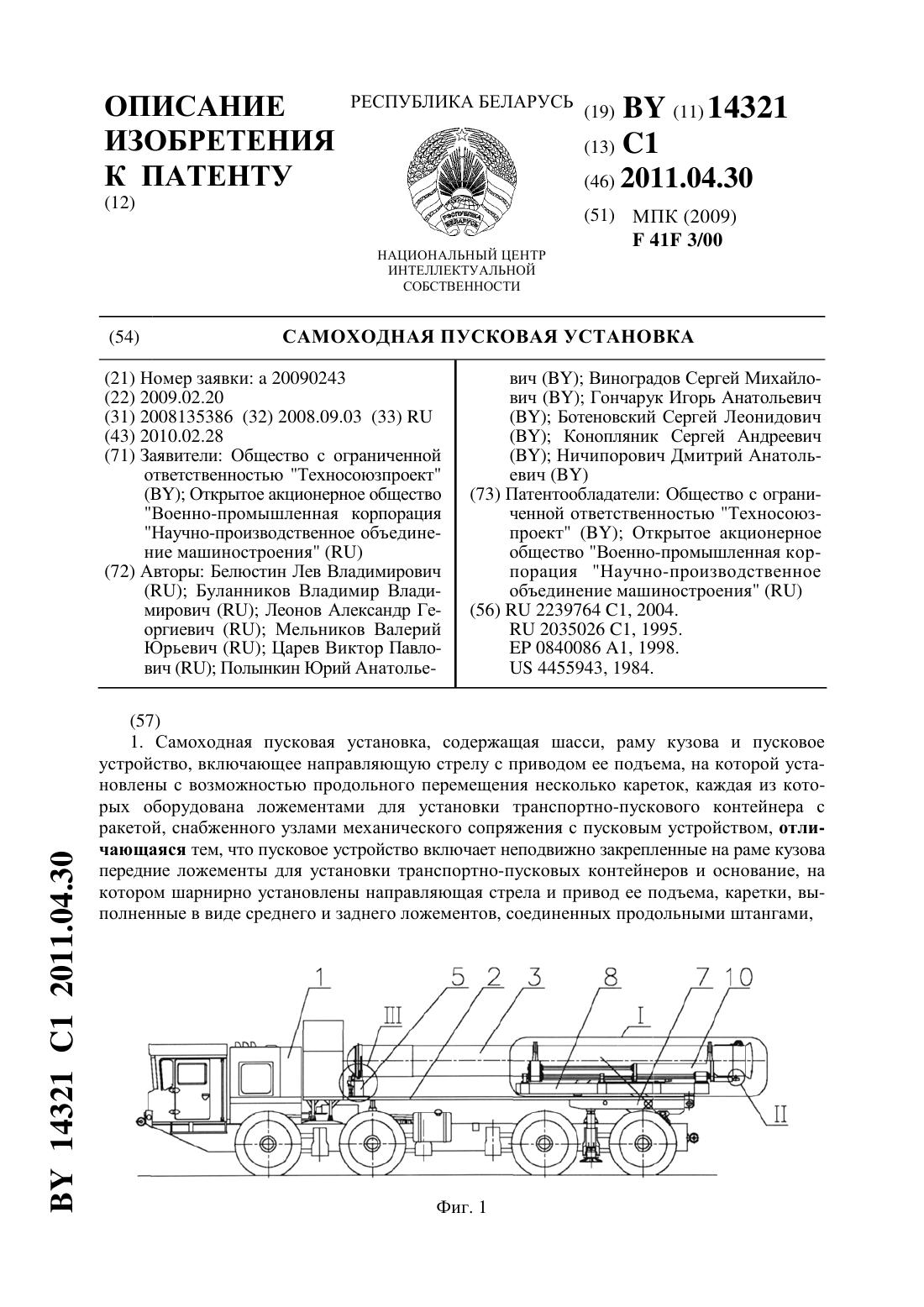
...с приводом, один захват которого взаимодействует с передним узлом механического сопряжения ТПК, а другой - с опорным элементом корпуса ракеты. При этом упомянутые узел механического сопряжения ТПК может быть выполнен в виде переднего фланца корпуса контейнера (например, аналогичного фланцу ТПК по заявке на изобретение 2007121564), а опорный элемент ракеты выполнен на наружной поверхности носового обтекателя (НО) ракеты, частично...
Мобильная азотная установка
Номер патента: U 8877
Опубликовано: 30.12.2012
Авторы: Груздилович Леонид Михайлович, Сергиеня Сергей Александрович, Куканков Геннадий Петрович, Линевич Александр Владимирович
МПК: F04B 41/06, E21B 43/00
Метки: установка, азотная, мобильная
Текст:
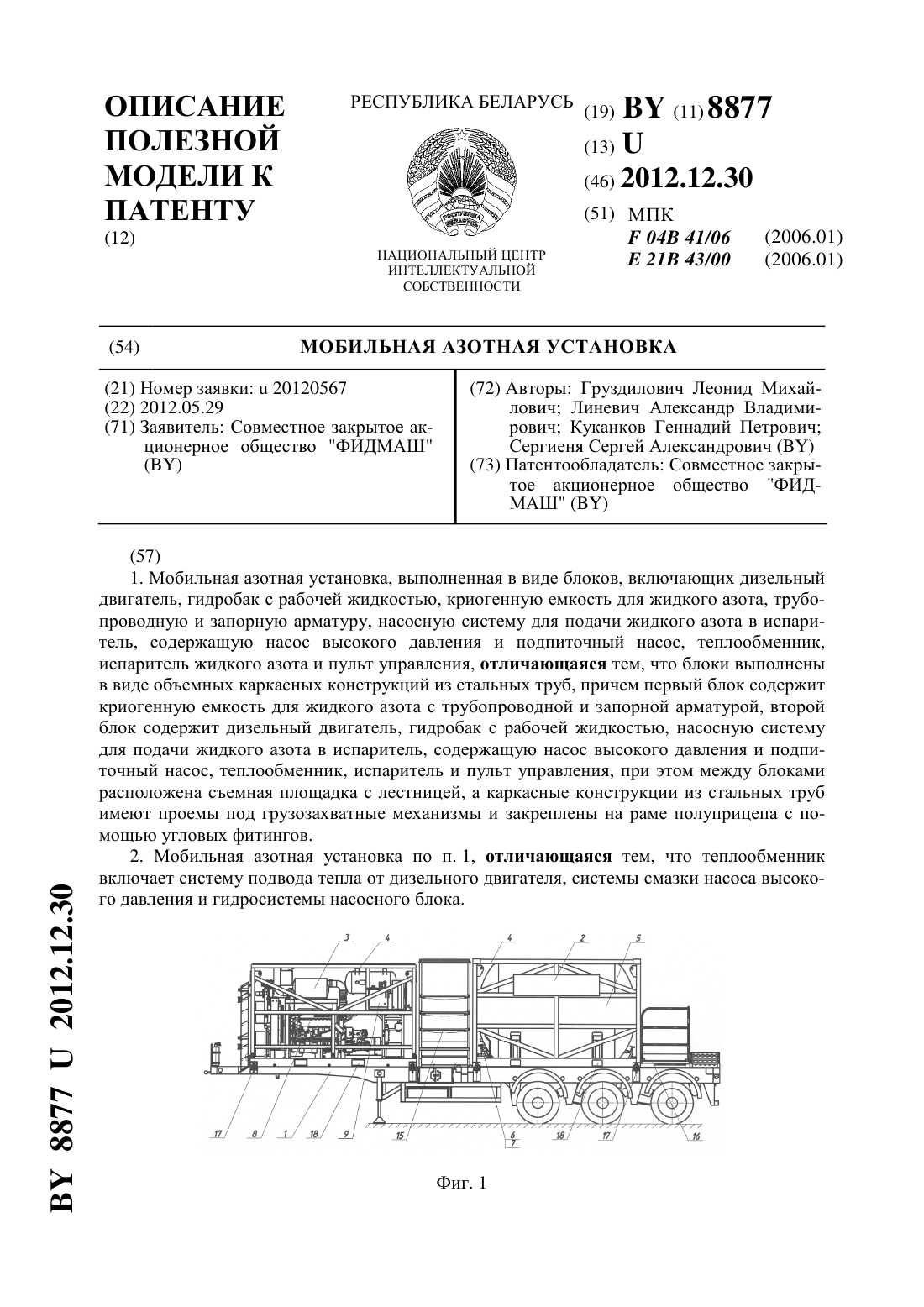
...и закреплены на раме полуприцепа с помощью угловых фитингов. Теплообменник включает систему подвода тепла от дизельного двигателя, системы смазки насоса высокого давления и гидросистемы насосного блока. В качестве дизельного двигателя используется дизельный двигатель 60 с турбонаддувом мощностью 550 л.с. при 2100 об/мин с электронной системой управления,а в качестве насоса высокого давления используется трехплунжерный насос фирмы 200 с...
Мобильная смесительная установка
Номер патента: U 7872
Опубликовано: 30.12.2011
Автор: Кузнецов Николай Иванович
МПК: B28C 5/08
Метки: установка, мобильная, смесительная
Текст:
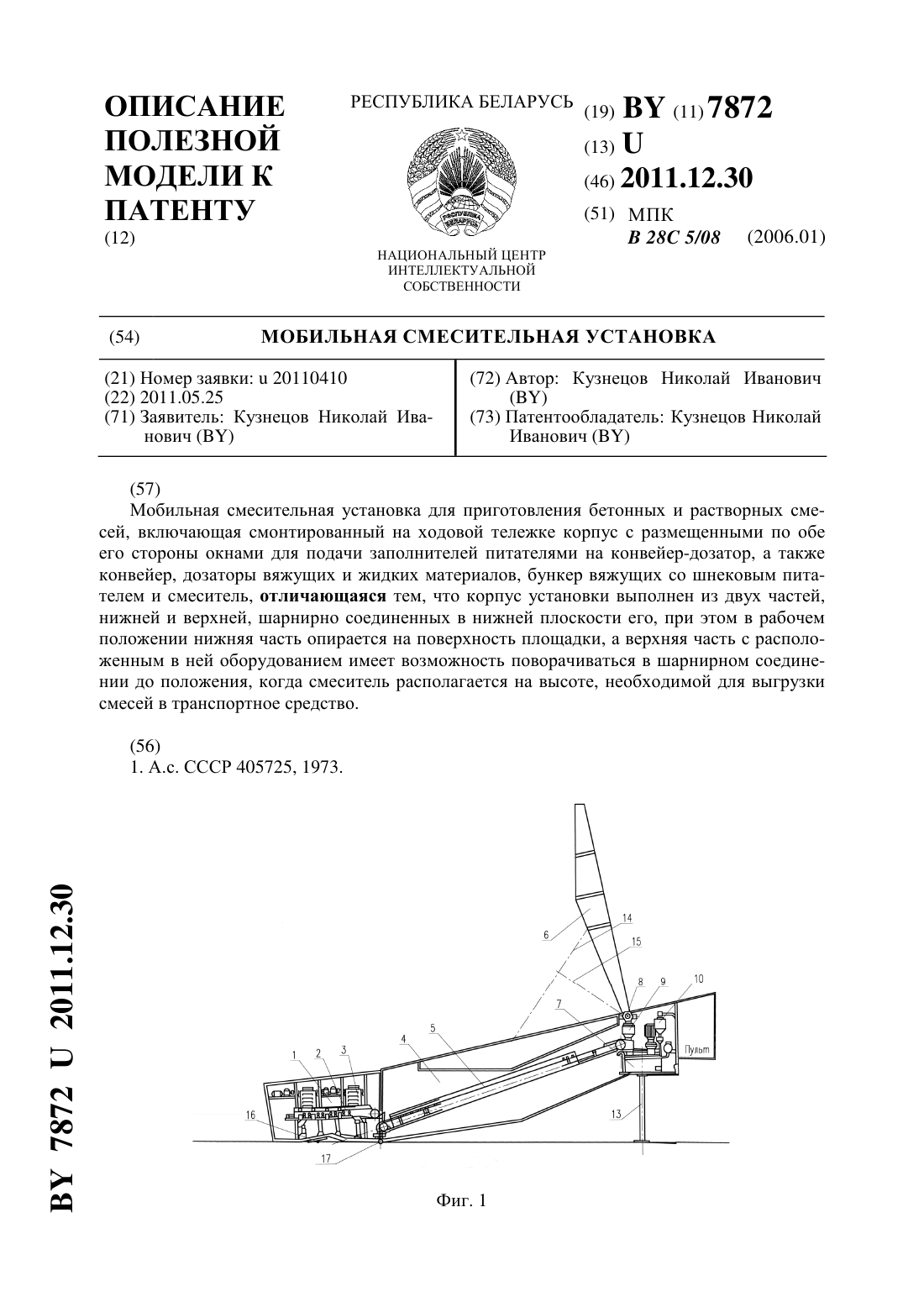
...частей корпуса позволило упростить выгрузку готовой смеси, исключив необходимость в конвейере для ее выгрузки. На фиг. 1 изображена установка в рабочем положении. На фиг. 2 - вид сбоку в транспортном положении. В нижней части 1 корпуса установлены конвейер-дозатор 2, питатели 3 заполнителей,например скребковые или лотковые вибропитатели, опорная плита 16 со шкворнем для соединения с тягачом, а также детали шарнирного соединения 17 с...
Предыдущий патент: Тренажер для обучения спасателей-пожарных
Следующий патент: Устройство для фильтрации информации
Случайный патент: Фильтр буровой скважины