Система наведения телеуправляемой ракеты при ручном сопровождении цели
Номер патента: U 1347
Опубликовано: 30.06.2004
Авторы: Левадный Александр Николаевич, Кун Александр Александрович, Шабан Сергей Александрович
Текст
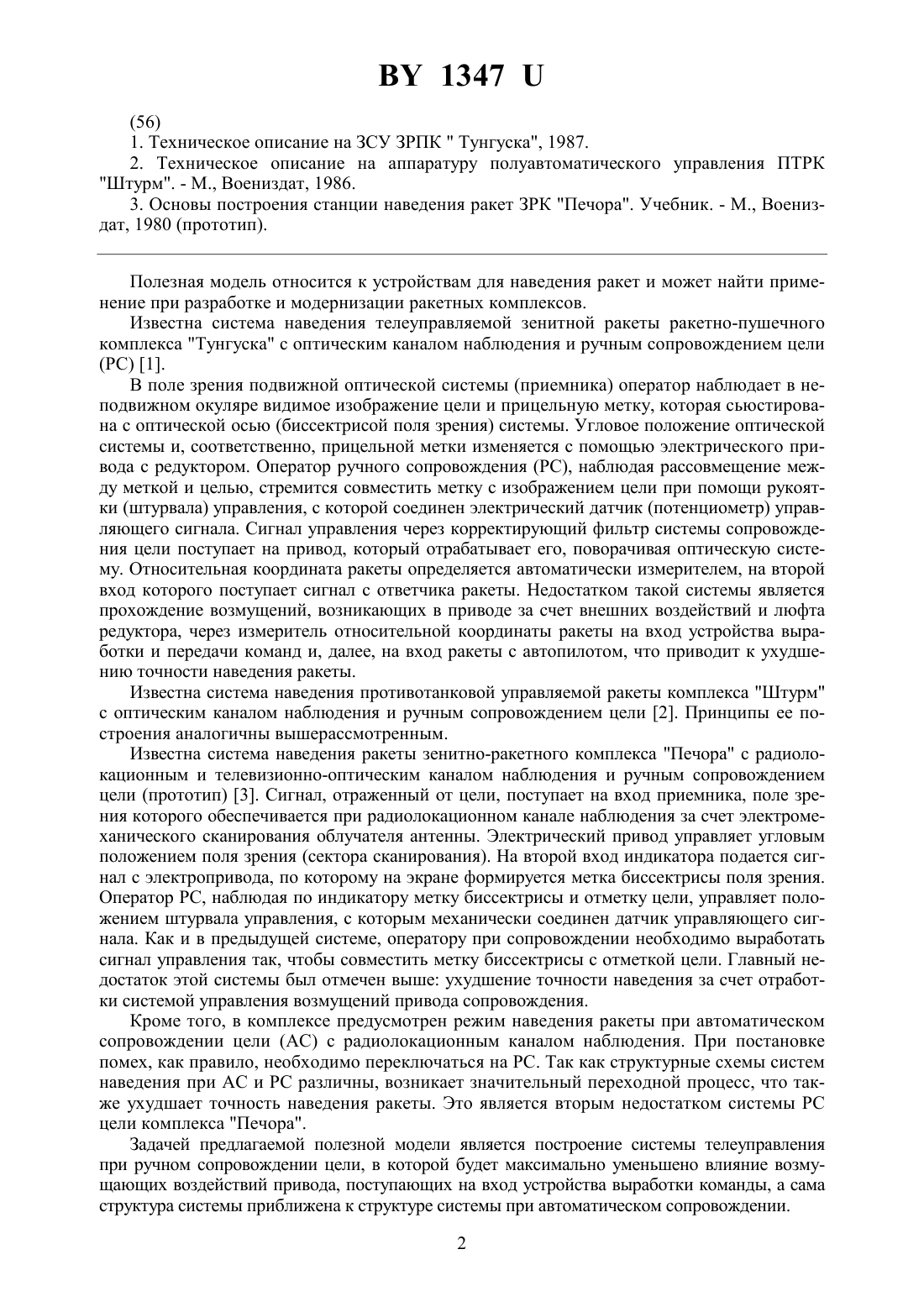
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ ПРИ РУЧНОМ СОПРОВОЖДЕНИИ ЦЕЛИ(71) Заявитель Военная академия Республики Беларусь(72) Авторы Кун Александр Александрович Левадный Александр Николаевич Шабан Сергей Александрович(73) Патентообладатель Военная академия Республики Беларусь(57) Система наведения телеуправляемой ракеты при ручном сопровождении цели, включающая последовательно соединенные приемник отраженного или излученного сигнала цели, индикатор, блок оператора ручного сопровождения с рукояткой управления, датчик управляющего воздействия, задаваемого оператором, корректирующий фильтр и электропривод сопровождения цели, выход которого соединен со вторым входом индикатора и вторым входом измерителя относительной координаты ракеты, первый вход которого соединен с приемником сигнала ответчика ракеты, а выход подключен к последовательно соединенным устройству выработки и передачи команд и автопилоту, отличающаяся тем, что в нее дополнительно включаются вместо датчика управляющего воздействия датчик относительной координаты, а также формирователь маркера оператора, второй корректирующий фильтр и сумматор, причем вход формирователя маркера соединен с выходом датчика относительной координаты цели, а выход с третьим входом индикатора,вход второго корректирующего фильтра соединен с выходом датчика относительной координаты цели, а выход соединен с первым входом сумматора, второй вход сумматора соединен с выходом относительной координаты ракеты, а выход сумматора соединен с входом устройства выработки команд.(56) 1. Техническое описание на ЗСУ ЗРПКТунгуска, 1987. 2. Техническое описание на аппаратуру полуавтоматического управления ПТРК Штурм. - М., Воениздат, 1986. 3. Основы построения станции наведения ракет ЗРК Печора. Учебник. - М., Воениздат, 1980 (прототип). Полезная модель относится к устройствам для наведения ракет и может найти применение при разработке и модернизации ракетных комплексов. Известна система наведения телеуправляемой зенитной ракеты ракетно-пушечного комплекса Тунгуска с оптическим каналом наблюдения и ручным сопровождением цели 1. В поле зрения подвижной оптической системы (приемника) оператор наблюдает в неподвижном окуляре видимое изображение цели и прицельную метку, которая сьюстирована с оптической осью (биссектрисой поля зрения) системы. Угловое положение оптической системы и, соответственно, прицельной метки изменяется с помощью электрического привода с редуктором. Оператор ручного сопровождения , наблюдая рассовмещение между меткой и целью, стремится совместить метку с изображением цели при помощи рукоятки (штурвала) управления, с которой соединен электрический датчик (потенциометр) управляющего сигнала. Сигнал управления через корректирующий фильтр системы сопровождения цели поступает на привод, который отрабатывает его, поворачивая оптическую систему. Относительная координата ракеты определяется автоматически измерителем, на второй вход которого поступает сигнал с ответчика ракеты. Недостатком такой системы является прохождение возмущений, возникающих в приводе за счет внешних воздействий и люфта редуктора, через измеритель относительной координаты ракеты на вход устройства выработки и передачи команд и, далее, на вход ракеты с автопилотом, что приводит к ухудшению точности наведения ракеты. Известна система наведения противотанковой управляемой ракеты комплекса Штурм с оптическим каналом наблюдения и ручным сопровождением цели 2. Принципы ее построения аналогичны вышерассмотренным. Известна система наведения ракеты зенитно-ракетного комплекса Печора с радиолокационным и телевизионно-оптическим каналом наблюдения и ручным сопровождением цели (прототип) 3. Сигнал, отраженный от цели, поступает на вход приемника, поле зрения которого обеспечивается при радиолокационном канале наблюдения за счет электромеханического сканирования облучателя антенны. Электрический привод управляет угловым положением поля зрения (сектора сканирования). На второй вход индикатора подается сигнал с электропривода, по которому на экране формируется метка биссектрисы поля зрения. Оператор , наблюдая по индикатору метку биссектрисы и отметку цели, управляет положением штурвала управления, с которым механически соединен датчик управляющего сигнала. Как и в предыдущей системе, оператору при сопровождении необходимо выработать сигнал управления так, чтобы совместить метку биссектрисы с отметкой цели. Главный недостаток этой системы был отмечен выше ухудшение точности наведения за счет отработки системой управления возмущений привода сопровождения. Кроме того, в комплексе предусмотрен режим наведения ракеты при автоматическом сопровождении цели (АС) с радиолокационным каналом наблюдения. При постановке помех, как правило, необходимо переключаться на . Так как структурные схемы систем наведения при АС иразличны, возникает значительный переходной процесс, что также ухудшает точность наведения ракеты. Это является вторым недостатком системыцели комплекса Печора. Задачей предлагаемой полезной модели является построение системы телеуправления при ручном сопровождении цели, в которой будет максимально уменьшено влияние возмущающих воздействий привода, поступающих на вход устройства выработки команды, а сама структура системы приближена к структуре системы при автоматическом сопровождении. 2 1347 Система наведения телеуправляемой ракеты при ручном сопровождении цели, включающая последовательно соединенные приемник отраженного или излученного сигнала цели,индикатор, блок оператора ручного сопровождения с рукояткой управления, датчик управляющего воздействия, задаваемого оператором, корректирующий фильтр и электропривод сопровождения цели, выход которого соединен со вторым входом индикатора и вторым входом измерителя относительной координаты ракеты, первый вход которого соединен с приемником сигнала ответчика ракеты, а выход подключен к последовательно соединенным устройству выработки и передачи команд и автопилоту, согласно полезной модели, в нее дополнительно включаются вместо датчика управляющего воздействия датчик относительной координаты, а также формирователь маркера оператора, второй корректирующий фильтр и сумматор, причем вход формирователя маркера соединен с выходом датчика относительной координаты цели, а выход с третьим входом индикатора, вход второго корректирующего фильтра соединен с выходом датчика относительной координаты цели, а выход соединен с первым входом сумматора, второй вход сумматора соединен с выходом относительной координаты ракеты, а выход сумматора соединен с входом устройства выработки команд. На фигуре показана структура предлагаемой системы наведения телеуправляемой ракеты при ручном сопровождении цели. В состав системы входят следующие элементы 1 - приемник, 2 - индикатор, 3 - оператор ручного сопровождения, 4 - датчик относительной координаты, 5 - формирователь маркера,6 - корректирующий фильтр системы слежения, 7 - электропривод, 8 - корректирующий фильтр относительной координаты цели, 9 - ответчик ракеты, 10 - измеритель относительной координаты ракеты, 11 - устройство выработки и передачи команды, 12 - автопилот. Сигнал от цели с выхода приемника 1 подается на первый вход индикатора 2. Оператор 3 изменяет положение штурвала управления и датчика относительной координаты 4, с выхода которого сигнал подается на формирователь маркера 5 и корректирующий фильтр 6. Фильтр 6 подключен к входу электропривода 7. На второй вход индикатора подается сигнал с электропривода 7, по которому на экране формируется метка биссектрисы поля зрения . На третий вход индикатора подается маркер с формирователя 5. Вход корректирующего фильтра 8 соединен с выходом датчика относительной координаты цели 4, а выход соединен с первым входом сумматора, второй вход сумматора соединен с выходом относительной координаты ракеты, а выход сумматора соединен с входом устройства выработки команд. Оператор, наблюдая по индикатору, управляет штурвалом так, чтобы с максимальной точностью совместить маркер с отметкой цели. При этом задача управления приводом 7 с оператора снимается, а датчик 4 является датчиком относительной координаты, а не датчиком управляющего сигнала на привод, как в существующих системах. Измеренная относительная координата цели подается на корректирующие фильтры 6 и 8. Фильтр 6 обеспечивает требуемые динамические свойства системы сопровождения цели нормальные запасы устойчивости и требуемые характеристики переходного процесса. С выхода ответчика ракеты 9 сигнал ракеты поступает на вход измерителя относительной угловой координаты ракеты 10. На второй вход измерителя 10 поступает сигнал угловой координаты биссектрисы поля зрения. Фильтр 8 должен обеспечить одинаковые динамические свойства при прохождении возмущений привода пр по цепи измерения относительной координаты цели ц и по цепи измерения относительной координаты ракеты . На вход устройства выработки и передачи команды поступает разность относительных угловых координат цели и ракеты. Команда управления для отработки подается в автопилот. Техническим результатом предлагаемой полезной модели являются компенсация влияния возмущений привода на ошибки наведения ракеты на 70 по сравнению с прототипом и уменьшение времени переходных процессов при переходе с АС нацели (и обратно) в 1,5-2 раза. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: F41G 7/30
Метки: ручном, телеуправляемой, сопровождении, наведения, система, цели, ракеты
Код ссылки
<a href="https://by.patents.su/3-u1347-sistema-navedeniya-teleupravlyaemojj-rakety-pri-ruchnom-soprovozhdenii-celi.html" rel="bookmark" title="База патентов Беларуси">Система наведения телеуправляемой ракеты при ручном сопровождении цели</a>
Прицел-прибор наведения
Номер патента: U 818
Опубликовано: 30.03.2003
Авторы: Литвяков Сергей Борисович, Тареев Анатолий Михайлович, Поконечный Здислав Иосифович, Покрышкин Владимир Иванович
МПК: G02B 23/00, F41G 7/26
Метки: прицел-прибор, наведения
Текст:
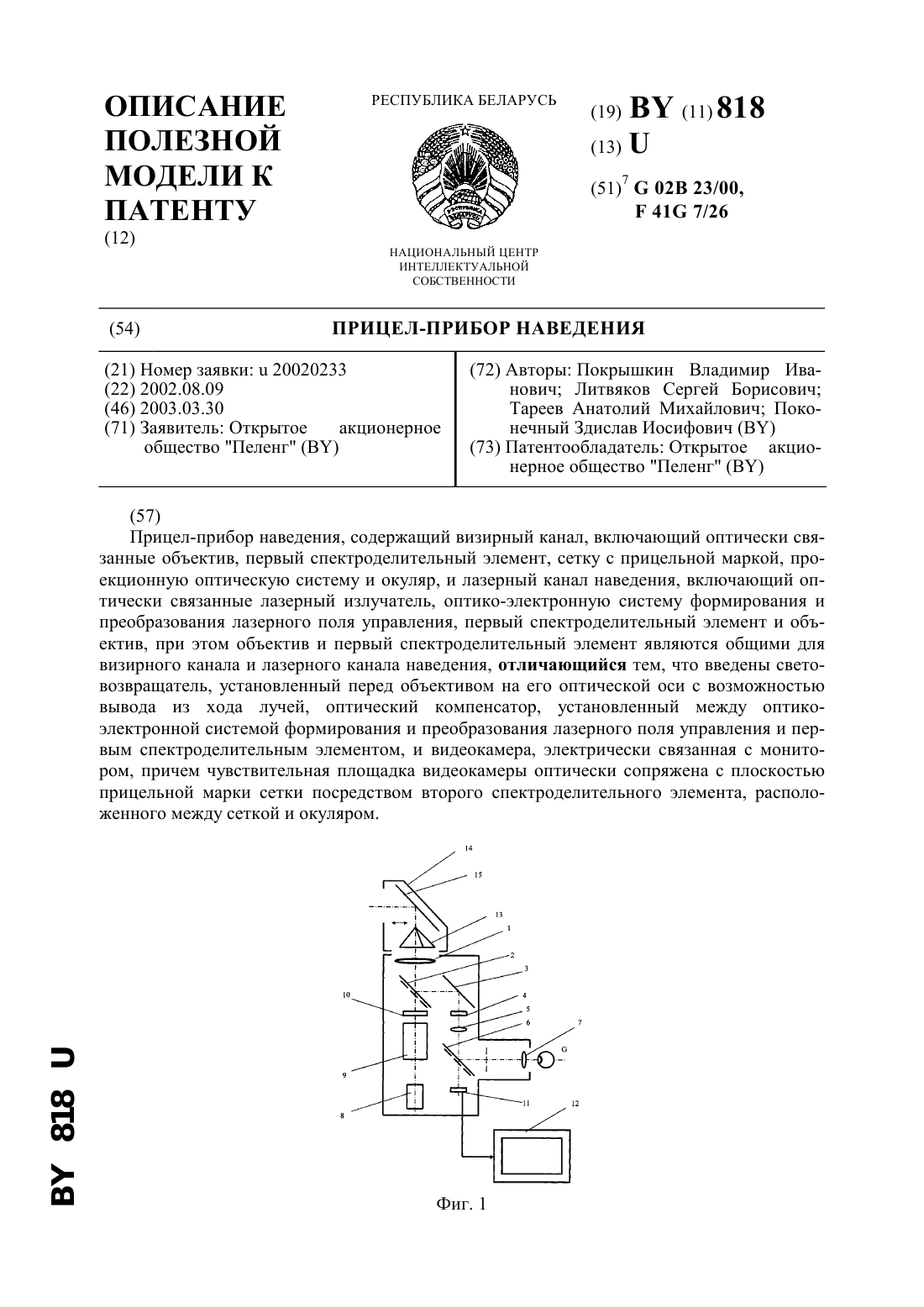
...параллельности канала наведения и визирного канала прицела-прибора наведения при любых условиях эксплуатации, а следовательно, и возможность выверки этих каналов, что приводит к повышению точности стрельбы при использовании канала наведения. 2 818 На фиг. 1 представлена принципиальная схема прицела-прибора наведения, на фиг. 2 вид поля зрения монитора в момент контроля параллельности лазерного канала наведения и визирного канала....
Способ подачи сигнала готовности боевого комплекса наводчику при визировании цели с использованием изображения прицельной марки
Номер патента: 5487
Опубликовано: 30.09.2003
Автор: Савченко Владимир Дмитриевич
МПК: F41G 3/00
Метки: изображения, цели, боевого, наводчику, использованием, сигнала, готовности, комплекса, подачи, способ, визировании, марки, прицельной
Текст:
...наводчика. Поставленная задача решается тем, что в способе подачи сигнала готовности боевого комплекса наводчику при визировании цели с использованием изображения прицельной марки путем индикации сигнала готовности, в отличие от прототипа индикацию осуществляют путем изменения изображения прицельной марки или добавления к ее изображению дополнительного фрагмента в момент достижения готовности боевого комплекса к поражению цели. На фиг. 1...
Следящая система автоматического управления с компенсацией неизмеряемых экспоненциально-коррелированных возмущений

Номер патента: U 1170
Опубликовано: 30.12.2003
Авторы: Цеховой Аркадий Евгеньевич, Мацкевич Артур Николаевич, Розсудовский Сергей Викторович
МПК: G05B 11/01
Метки: следящая, система, возмущений, автоматического, неизмеряемых, экспоненциально-коррелированных, компенсацией, управления
Текст:
...задающее устройство, первое сравнивающее устройство, усилитель, второе сравнивающее устройство, усилитель мощности, двигатель, рабочий орган, а также параллельное корректирующее устройство и датчик обратной связи, при этом выход двигателя подключен через параллельное корректирующее устройство к второму входу второго сравнивающего устройства и через датчик обратной связи к второму входу первого сравнивающего устройства, и отличается от...
Следящая система автоматического управления с компенсацией неизмеряемых линейно изменяющихся во времени возмущений
Номер патента: U 1001
Опубликовано: 30.09.2003
Авторы: Сончик Дмитрий Михайлович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: следящая, автоматического, управления, система, изменяющихся, неизмеряемых, компенсацией, линейно, возмущений, времени
Текст:
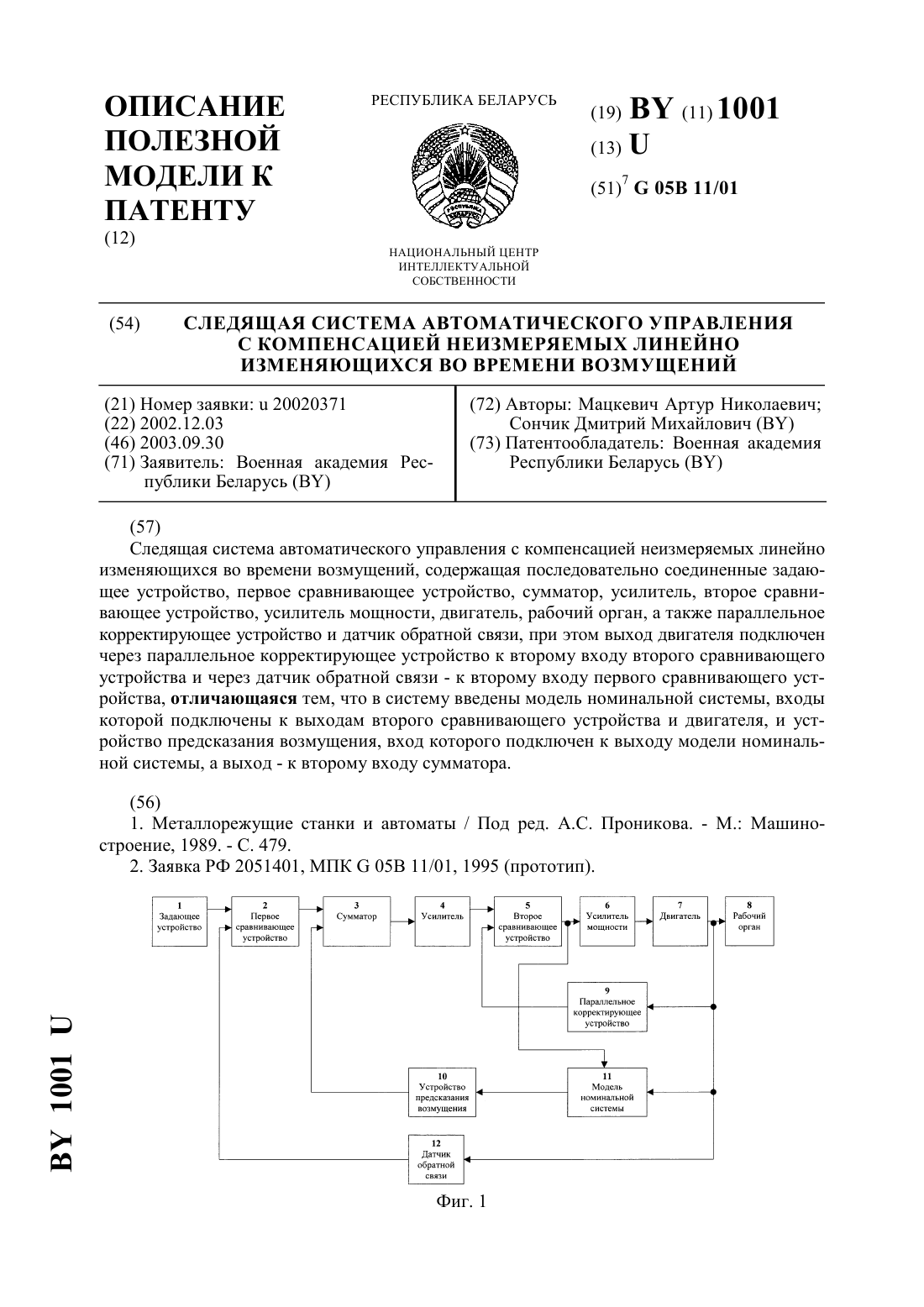
...введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых линейно изменяющихся во времени возмущений, а на фиг. 2 - структурная схема устройства предсказания возмущения....
Следящая система автоматического управления с компенсацией неизмеряемых возмущений, изменяющихся по кубическому закону

Номер патента: U 1003
Опубликовано: 30.09.2003
Авторы: Розсудовский Сергей Викторович, Мацкевич Артур Николаевич
МПК: G05B 11/01
Метки: управления, возмущений, закону, компенсацией, изменяющихся, следящая, система, неизмеряемых, кубическому, автоматического
Текст:
...в систему введены модель номинальной системы, входы которой подключены к выходам второго сравнивающего устройства и двигателя, и устройство предсказания возмущения, вход которого подключен к выходу модели номинальной системы, а выход - к второму входу сумматора. На фиг. 1 представлена функциональная схема ССАУ с компенсацией неизмеряемых возмущений, изменяющихся по кубическому закону, а на фиг. 2 - структурная схема устройства предсказания...
Предыдущий патент: Способ получения бактериального препарата на основе бифидобактерий
Следующий патент: Чистовая клеть прокатного стана
Случайный патент: Прибор для оперативного контроля огнезащищенности древесины