Транспортное средство
Номер патента: U 5804
Опубликовано: 30.12.2009
Авторы: Жигилей Виктор Васильевич, Мордик Елена Владимировна, Кулешов Василий Васильевич, Кулешова Анна Васильевна, Лобкова Майя Петровна
Текст
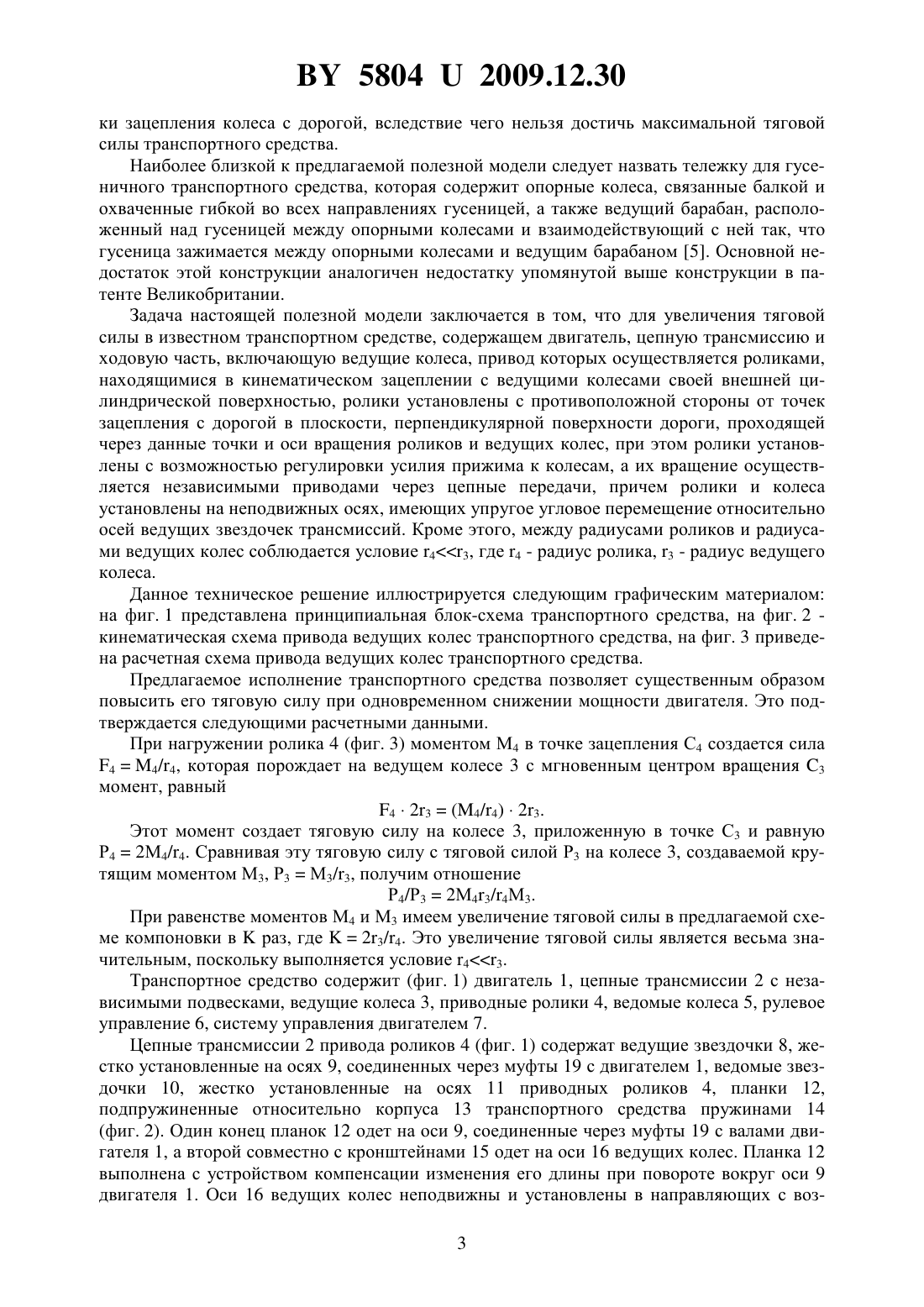
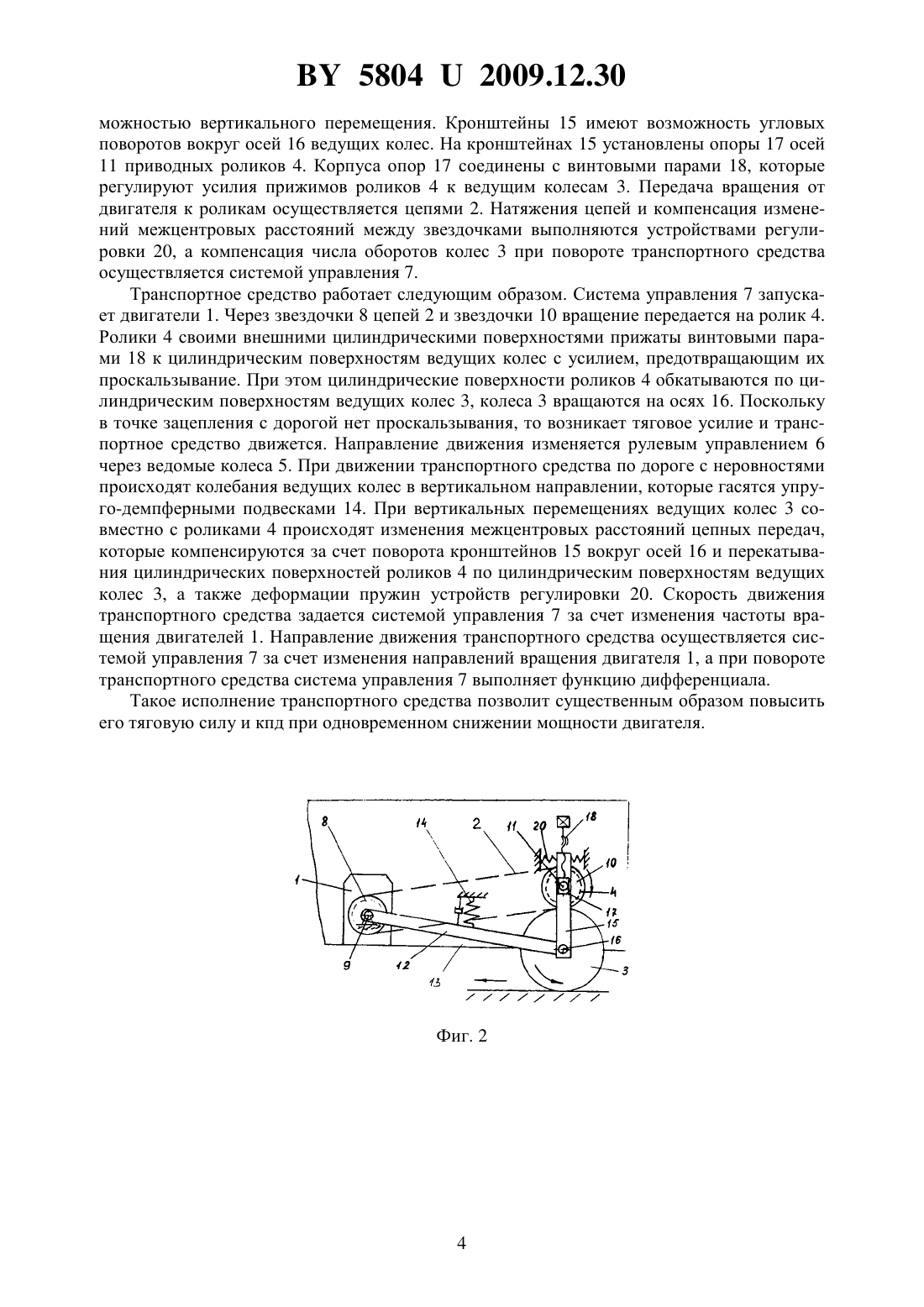
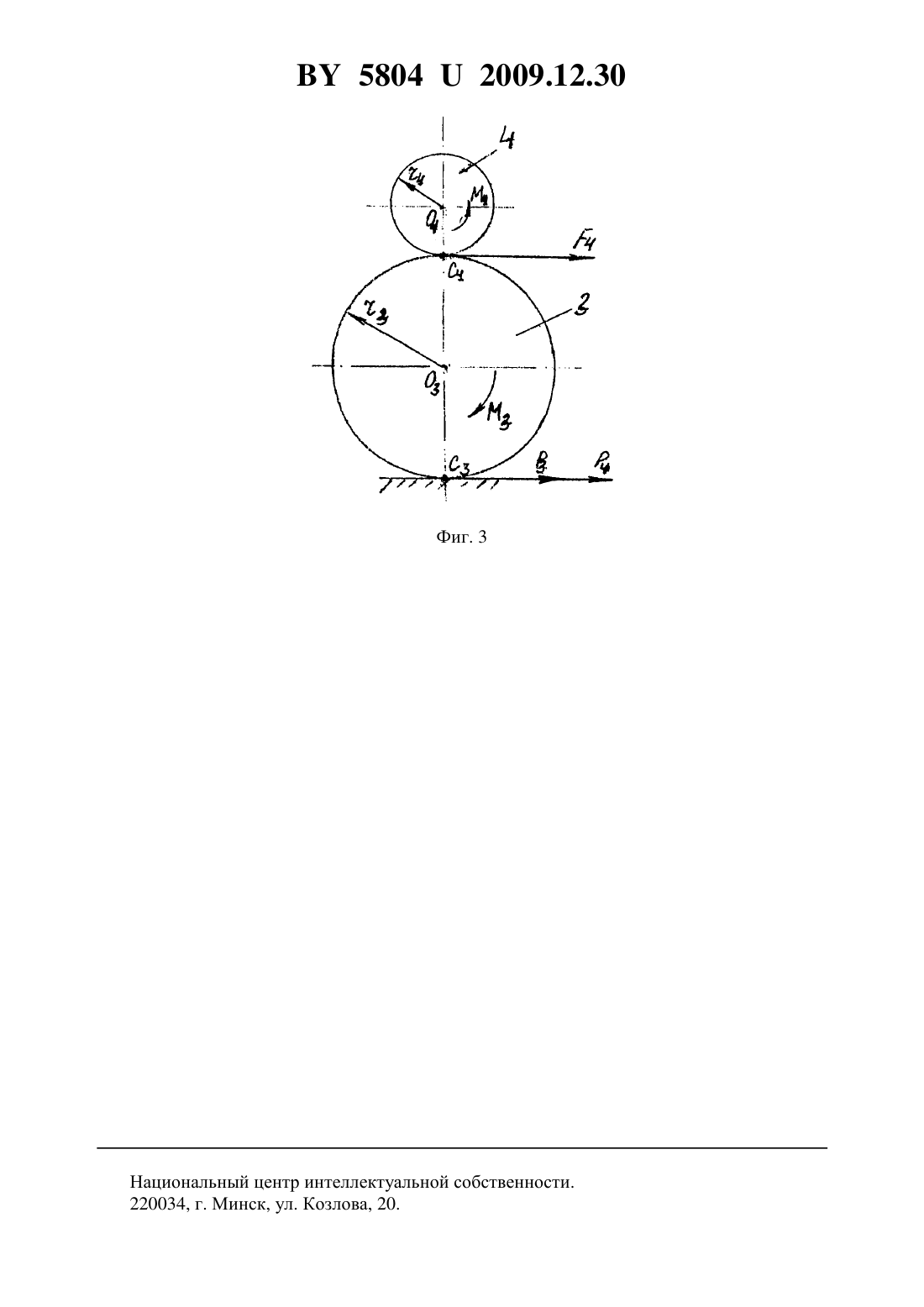
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Научно-производственное частное унитарное предприятие ТЕХНОТОТ(72) Авторы Кулешов Василий Васильевич Кулешова Анна Васильевна Лобкова Майя Петровна Жигилей Виктор Васильевич Мордик Елена Владимировна(73) Патентообладатель Научно-производственное частное унитарное предприятие ТЕХНОТОТ(57) 1. Транспортное средство, содержащее двигатель, цепную трансмиссию и ходовую часть, включающую ведущие колеса, привод которых осуществляется роликами, находящимися в кинематическом зацеплении с ведущими колесами своей внешней цилиндрической поверхностью, отличающееся тем, что ролики установлены с противоположной стороны от точек зацепления колес с дорогой в плоскости, перпендикулярной поверхности дороги, проходящей через данные точки и оси вращения роликов ведущих колес, при этом ролики установлены с возможностью регулировки усилия прижима к колесам, а их вращение осуществляется независимыми приводами через трансмиссии, причем ролики и колеса установлены на неподвижных осях, имеющих упругое угловое перемещение относительно осей ведущих звездочек трансмиссий. 2. Транспортное средство по п. 1, отличающееся тем, что между радиусами роликов и радиусами ведущих колес соблюдается условие 43, где 4 - радиус ролика, 3 - радиус ведущего колеса.(56) 1. Долматовский Ю.А., Трененков И.И. Тракторы и автомобили. Краткий автомобильный справочник.- М. Гос. изд. сельхоз. лит., 1960. 2. Селиванов И.И. Автомобили и транспортные гусеничные средства высокой проходимости.- М. Наука, 1967.- С. 106. 3. Артоболевский И.И. Механизмы в современной технике Кулачковые и фрикционные механизмы. Механизмы с гибкими звеньями Справочное пособие в 7 томах. Т 5. - М. Наука, 1981.- С. 255. 4. Патент Великобритании 2230499, МПК 5 В 62 49/06. 5. Патент на изобретение РФ 1604149, МПК 562 55/24, 1986. Предлагаемая полезная модель относится к области транспортного машиностроения и может быть использована в транспортных средствах для выполнения операций по перевозке грузов, в том числе как средство перемещения для людей. Известны транспортные средства (автомобиль, трактор и т.п.), у которых движение осуществляется за счет вращения ведущих колес, жестко установленных на полуосях,привод которых осуществляется через трансмиссию двигателем. Для привода ведущих колес этих транспортных средств, особенно при большом диаметре колеса, требуется значительный крутящий момент на валах, что приводит к увеличению их диаметра, применению промежуточных устройств для повышения крутящего момента, а также повышению мощности двигателя. Металлоемкость транспортных средств в этих случаях увеличивается, а кпд уменьшается 1. Известно транспортное средство, ходовая часть которого состоит из четырех трехкатковых конструкций, образующих из трех малых колес одно большое колесо, которое вращается вокруг неподрессоренной оси машины. Оси малых колес ходовой части расположены концентрично под углом 120 относительно друг друга на радиальных кронштейнах, выполненных заодно со ступицей большого колеса. При движении по внедорожью вращаются большие колеса и машина перекатывается с грани на грань. При переходе на дорогу большие колеса блокируются, включается привод малых колес и машина движется как обычная колесная на четырех колесах 2. В таком транспортном средстве совместное вращение большого колеса с малыми вызывает неравномерность движения и большие динамические нагрузки в приводе, что приводит к снижению надежности транспортного средства. Известен также трехзвенный механизм, содержащий фрикционные колеса, которые установлены на неподвижных осях. Передача крутящего момента от одного колеса к другому осуществляется за счет касания их внешних цилиндрических поверхностей 3. В основном данный механизм используется в качестве фрикционной передачи в редукторах различного промышленного назначения. Как привод ведущих колес транспортного средства этот механизм не применяется из-за отсутствия технических решений, соответствующих требованиям ходовой части транспортного средства. В отличие от предыдущего аналога, в транспортном средстве, содержащем шасси с ходовыми колесами, с внутренней стороны которых установлены ведомые звездочки, привод ходовых колес осуществляется через цепную трансмиссию 4. Основным недостатком данного транспортного средства является то, что вследствие конструктивных особенностей привода ведомая звездочка выполнена диаметром значительно меньшим,чем диаметр ходового колеса, а ведущая звездочка расположена близко к горизонтальной плоскости, проходящей через оси ходовых колес. Такое конструктивное исполнение не позволяет создать максимальный крутящий момент на ходовом колесе относительно точ 2 58042009.12.30 ки зацепления колеса с дорогой, вследствие чего нельзя достичь максимальной тяговой силы транспортного средства. Наиболее близкой к предлагаемой полезной модели следует назвать тележку для гусеничного транспортного средства, которая содержит опорные колеса, связанные балкой и охваченные гибкой во всех направлениях гусеницей, а также ведущий барабан, расположенный над гусеницей между опорными колесами и взаимодействующий с ней так, что гусеница зажимается между опорными колесами и ведущим барабаном 5. Основной недостаток этой конструкции аналогичен недостатку упомянутой выше конструкции в патенте Великобритании. Задача настоящей полезной модели заключается в том, что для увеличения тяговой силы в известном транспортном средстве, содержащем двигатель, цепную трансмиссию и ходовую часть, включающую ведущие колеса, привод которых осуществляется роликами,находящимися в кинематическом зацеплении с ведущими колесами своей внешней цилиндрической поверхностью, ролики установлены с противоположной стороны от точек зацепления с дорогой в плоскости, перпендикулярной поверхности дороги, проходящей через данные точки и оси вращения роликов и ведущих колес, при этом ролики установлены с возможностью регулировки усилия прижима к колесам, а их вращение осуществляется независимыми приводами через цепные передачи, причем ролики и колеса установлены на неподвижных осях, имеющих упругое угловое перемещение относительно осей ведущих звездочек трансмиссий. Кроме этого, между радиусами роликов и радиусами ведущих колес соблюдается условие 43, где 4 - радиус ролика, 3 - радиус ведущего колеса. Данное техническое решение иллюстрируется следующим графическим материалом на фиг. 1 представлена принципиальная блок-схема транспортного средства, на фиг. 2 кинематическая схема привода ведущих колес транспортного средства, на фиг. 3 приведена расчетная схема привода ведущих колес транспортного средства. Предлагаемое исполнение транспортного средства позволяет существенным образом повысить его тяговую силу при одновременном снижении мощности двигателя. Это подтверждается следующими расчетными данными. При нагружении ролика 4 (фиг. 3) моментом М 4 в точке зацепления С 4 создается сила 44/4, которая порождает на ведущем колесе 3 с мгновенным центром вращения 3 момент, равный 423(4/4)23. Этот момент создает тяговую силу на колесе 3, приложенную в точке С 3 и равную Р 42 М 4/4. Сравнивая эту тяговую силу с тяговой силой Р 3 на колесе 3, создаваемой крутящим моментом М 3, Р 3 М 3/3, получим отношение Р 4/Р 32 М 43/4 М 3. При равенстве моментов М 4 и М 3 имеем увеличение тяговой силы в предлагаемой схеме компоновки враз, где 23/4. Это увеличение тяговой силы является весьма значительным, поскольку выполняется условие 43. Транспортное средство содержит (фиг. 1) двигатель 1, цепные трансмиссии 2 с независимыми подвесками, ведущие колеса 3, приводные ролики 4, ведомые колеса 5, рулевое управление 6, систему управления двигателем 7. Цепные трансмиссии 2 привода роликов 4 (фиг. 1) содержат ведущие звездочки 8, жестко установленные на осях 9, соединенных через муфты 19 с двигателем 1, ведомые звездочки 10, жестко установленные на осях 11 приводных роликов 4, планки 12,подпружиненные относительно корпуса 13 транспортного средства пружинами 14(фиг. 2). Один конец планок 12 одет на оси 9, соединенные через муфты 19 с валами двигателя 1, а второй совместно с кронштейнами 15 одет на оси 16 ведущих колес. Планка 12 выполнена с устройством компенсации изменения его длины при повороте вокруг оси 9 двигателя 1. Оси 16 ведущих колес неподвижны и установлены в направляющих с воз 3 58042009.12.30 можностью вертикального перемещения. Кронштейны 15 имеют возможность угловых поворотов вокруг осей 16 ведущих колес. На кронштейнах 15 установлены опоры 17 осей 11 приводных роликов 4. Корпуса опор 17 соединены с винтовыми парами 18, которые регулируют усилия прижимов роликов 4 к ведущим колесам 3. Передача вращения от двигателя к роликам осуществляется цепями 2. Натяжения цепей и компенсация изменений межцентровых расстояний между звездочками выполняются устройствами регулировки 20, а компенсация числа оборотов колес 3 при повороте транспортного средства осуществляется системой управления 7. Транспортное средство работает следующим образом. Система управления 7 запускает двигатели 1. Через звездочки 8 цепей 2 и звездочки 10 вращение передается на ролик 4. Ролики 4 своими внешними цилиндрическими поверхностями прижаты винтовыми парами 18 к цилиндрическим поверхностям ведущих колес с усилием, предотвращающим их проскальзывание. При этом цилиндрические поверхности роликов 4 обкатываются по цилиндрическим поверхностям ведущих колес 3, колеса 3 вращаются на осях 16. Поскольку в точке зацепления с дорогой нет проскальзывания, то возникает тяговое усилие и транспортное средство движется. Направление движения изменяется рулевым управлением 6 через ведомые колеса 5. При движении транспортного средства по дороге с неровностями происходят колебания ведущих колес в вертикальном направлении, которые гасятся упруго-демпферными подвесками 14. При вертикальных перемещениях ведущих колес 3 совместно с роликами 4 происходят изменения межцентровых расстояний цепных передач,которые компенсируются за счет поворота кронштейнов 15 вокруг осей 16 и перекатывания цилиндрических поверхностей роликов 4 по цилиндрическим поверхностям ведущих колес 3, а также деформации пружин устройств регулировки 20. Скорость движения транспортного средства задается системой управления 7 за счет изменения частоты вращения двигателей 1. Направление движения транспортного средства осуществляется системой управления 7 за счет изменения направлений вращения двигателя 1, а при повороте транспортного средства система управления 7 выполняет функцию дифференциала. Такое исполнение транспортного средства позволит существенным образом повысить его тяговую силу и кпд при одновременном снижении мощности двигателя. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: B62D 55/24
Метки: транспортное, средство
Код ссылки
<a href="https://by.patents.su/5-u5804-transportnoe-sredstvo.html" rel="bookmark" title="База патентов Беларуси">Транспортное средство</a>
Малогабаритное транспортное средство
Номер патента: U 3475
Опубликовано: 30.04.2007
Автор: ГЕРАСИМЕНКО ИГОРЬ ЯКОВЛЕВИЧ
МПК: B62D 21/00
Метки: малогабаритное, транспортное, средство
Текст:
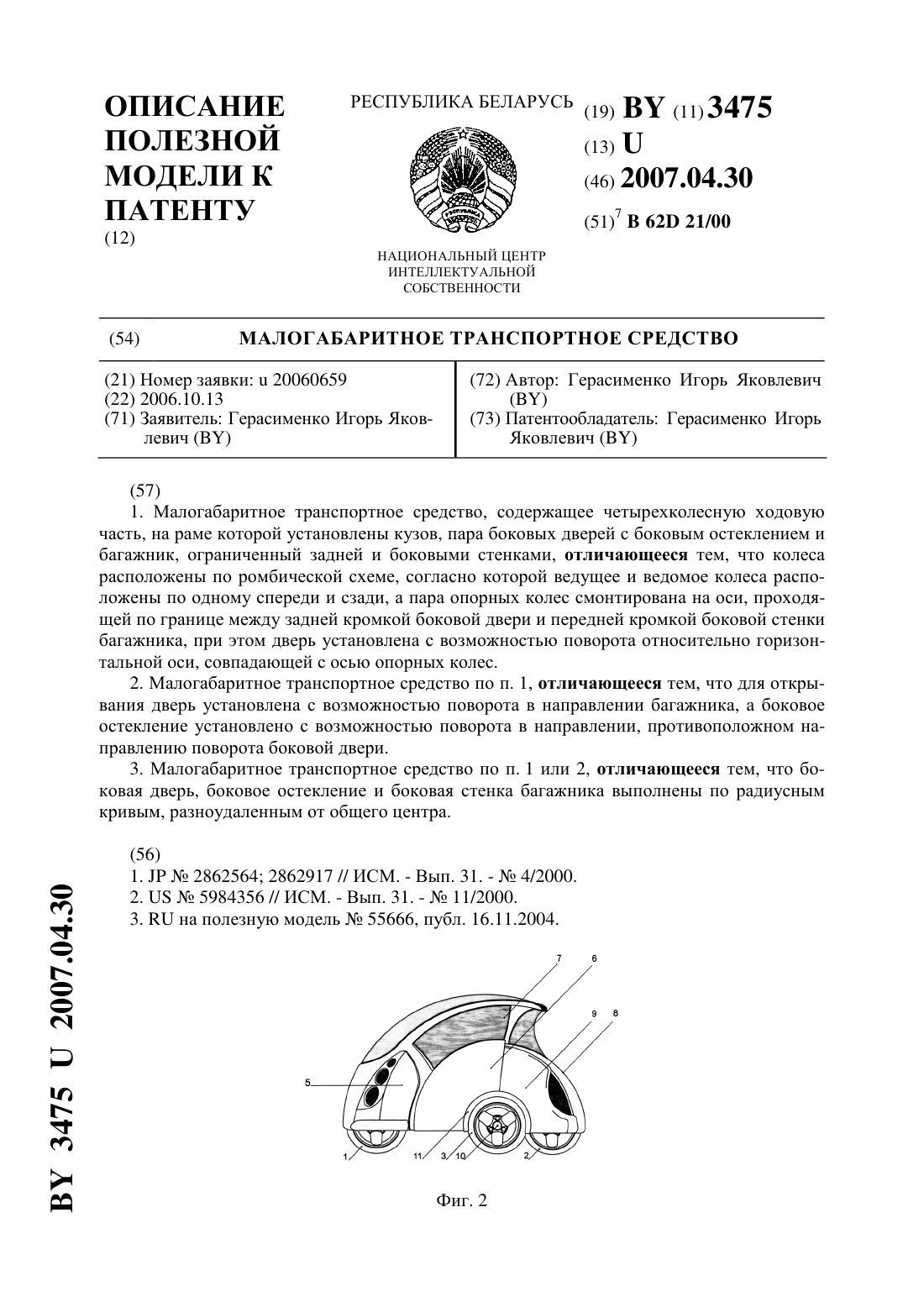
...конструкция малогабаритного транспортного средства, состояла в том, чтобы создать устойчивый городской транспорт,схема расположения четырех колес которого обеспечивает возможность открывания боковых дверей путем поворота относительно горизонтальной оси без выхода их за габариты машины. Поставленная задача решена следующим образом. Предложено малогабаритное транспортное средство, содержащее четырехколесную ходовую часть, на раме которой...
Транспортное средство с приводом мускульной силой человека
Номер патента: 2157
Опубликовано: 30.06.1998
Автор: Добролюбов Анатолий Иванович
Метки: мускульной, человека, силой, средство, приводом, транспортное
Текст:
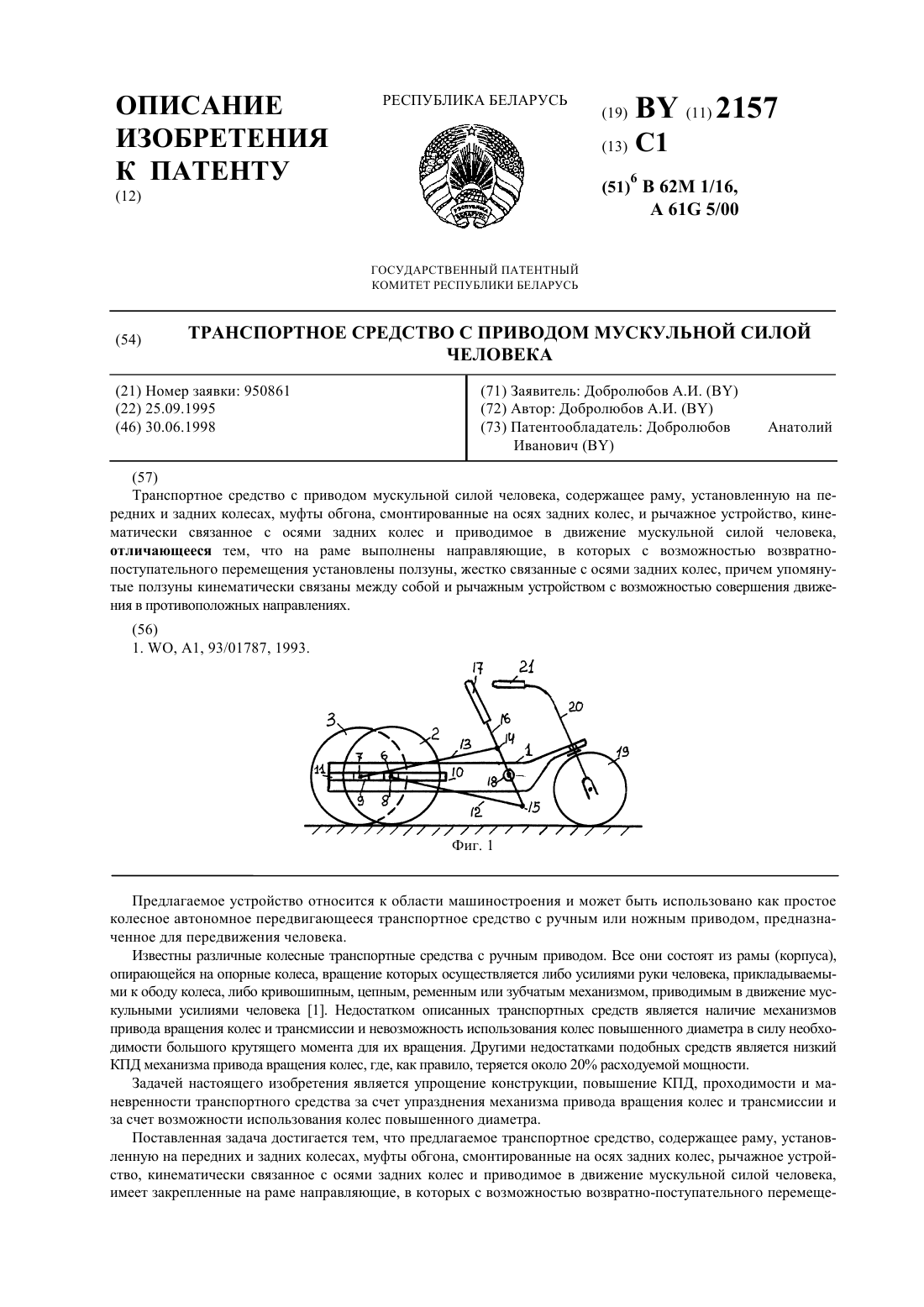
...фиг. 1 и 2 изображена схема предлагаемого транспортного средства, на фиг. 3 изображен вариант схемы с ножным приводом. Транспортное средство (фиг. 1) содержит раму 1, опирающуюся на опорные колеса 2 и 3, снабженные стандартными муфтами обгона 4 и 5. Оси 6 и 7 вращения колес смонтированы на ползунах 8 и 9, способных совершать возвратно-поступательные движения в направляющих 10 и 11, смонтированных на раме 1. Ползуны 8 и 9 шарнирно соединены с...
Колесное транспортное средство
Номер патента: 3496
Опубликовано: 30.09.2000
Авторы: Ильченко Георгий Георгиевич, Плахотник Василий Григорьевич, Лапцевич Александр Иванович, Коробкин Владимир Андреевич, Богодяж Николай Павлович
МПК: B62D 21/02
Метки: средство, транспортное, колесное
Текст:
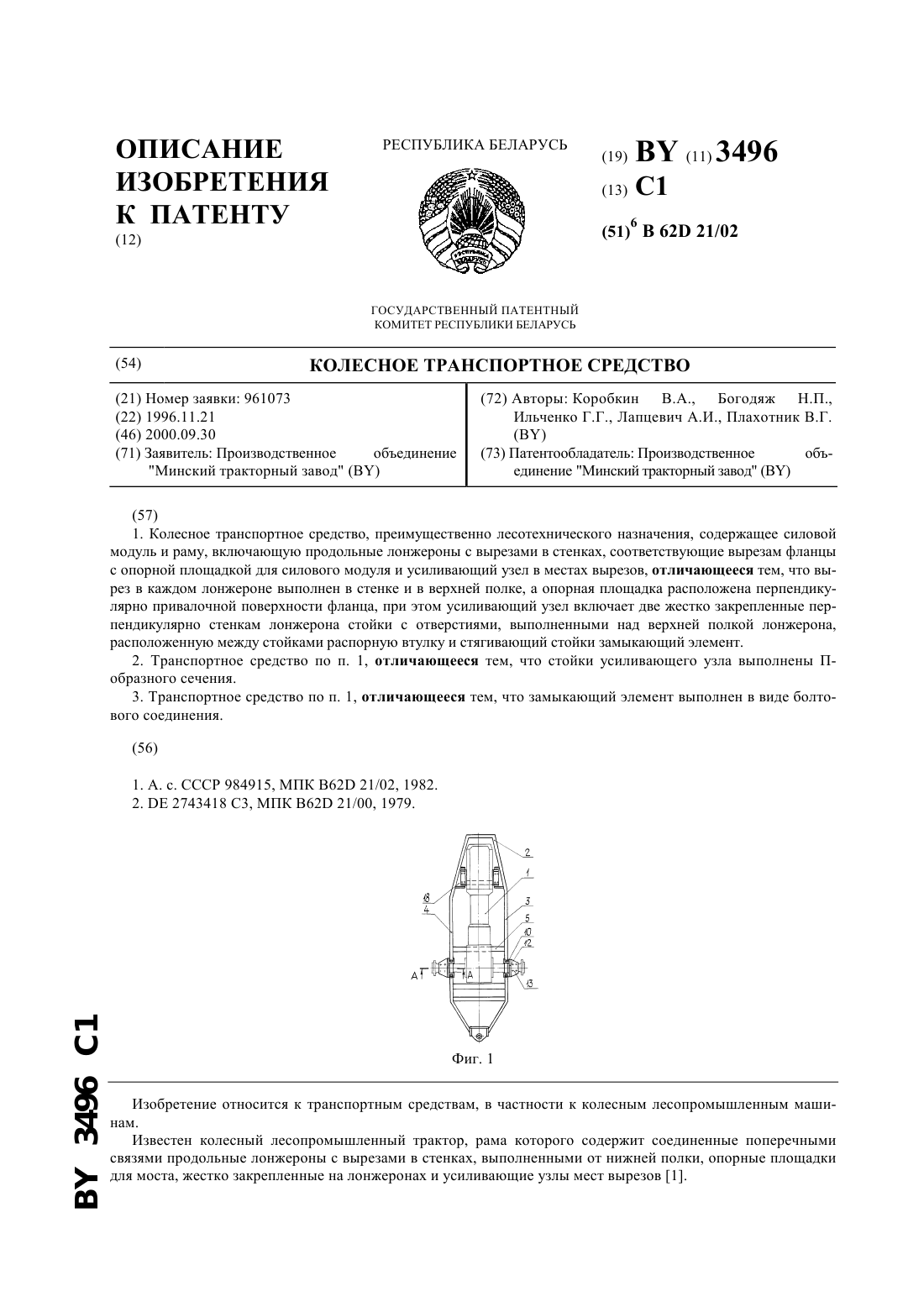
...задачи осуществляется выполнением рамы, содержащей продольные лонжероны с вырезами в стенках и в верхних полках, соответствующие вырезам в лонжеронах фланцы с опорной площадкой, расположенной перпендикулярно привалочной поверхности, и усиливающий узел, включающий две вертикальные стойки, жестко закрепленные к лонжерону перпендикулярно стенкам, с отверстиями, выполненными над верхней полкой лонжерона, распорную втулку, размещенную между...
Транспортное средство
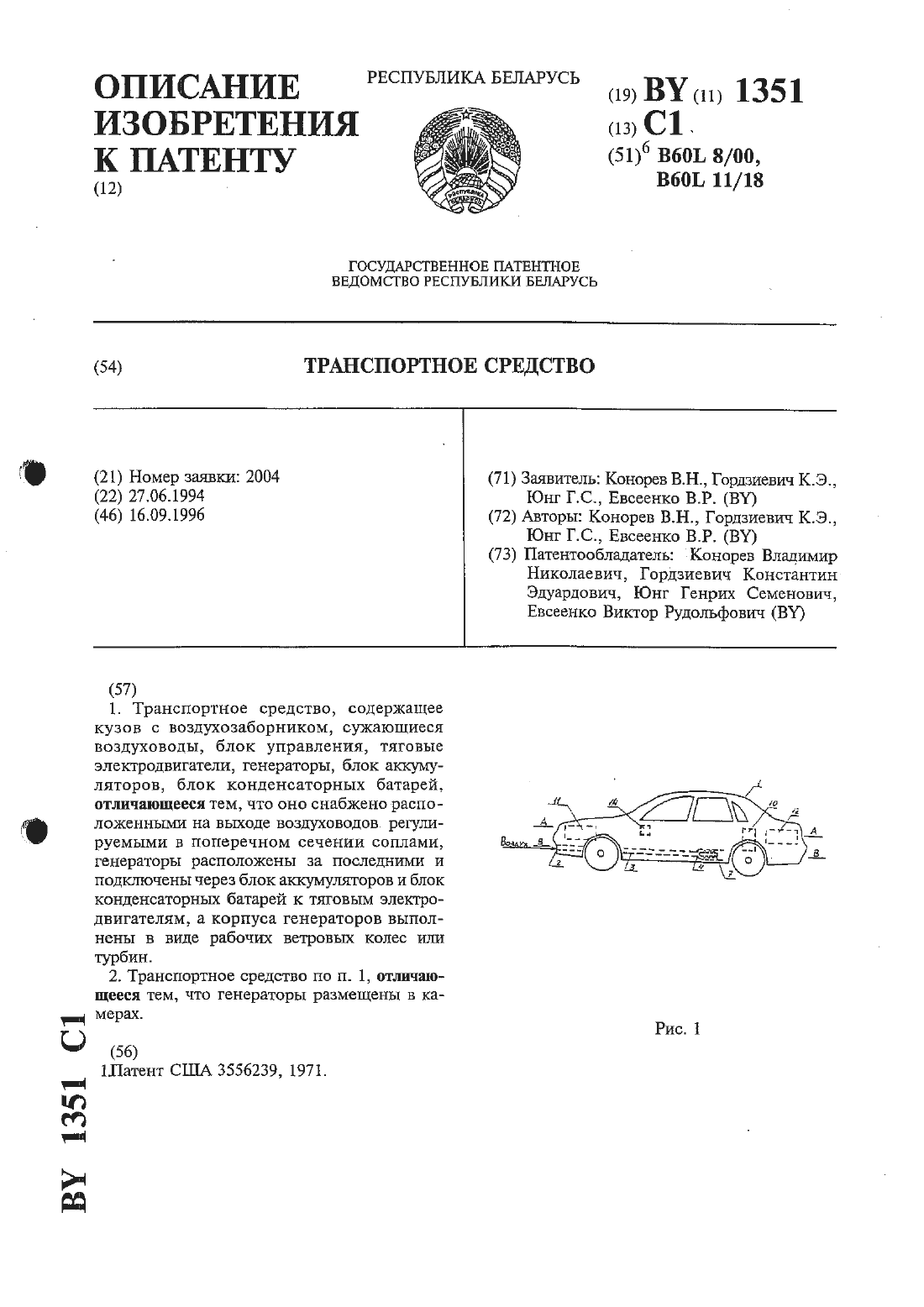
Номер патента: 1351
Опубликовано: 16.09.1996
Авторы: Конореев Владимир Николаевич, Гордзиевич Константин Эдуардович, Евсеенко Виктор Рудольфович, Юнг Генрих Семенович
МПК: B60L 11/18, B60L 8/00
Метки: транспортное, средство
Текст:
...воздуха воздуховодами 3, которые оканчиваются соплами 4, регулируемыми в поперечном сечении посредством заслонок 5 для изменения вели 10чины потока воздуха при его поступлении на корпуса 6 генераторов 7. Корпуса 6 генераторов 7 при установке их оси параллельно потоку воздуха выполнены в виде лопастей турбин 8, а при расположении перпендикулярно - в виде ветровых колес 9. Тяговые электродвигатели 10 расположены на осях транспортного...
Транспортное средство
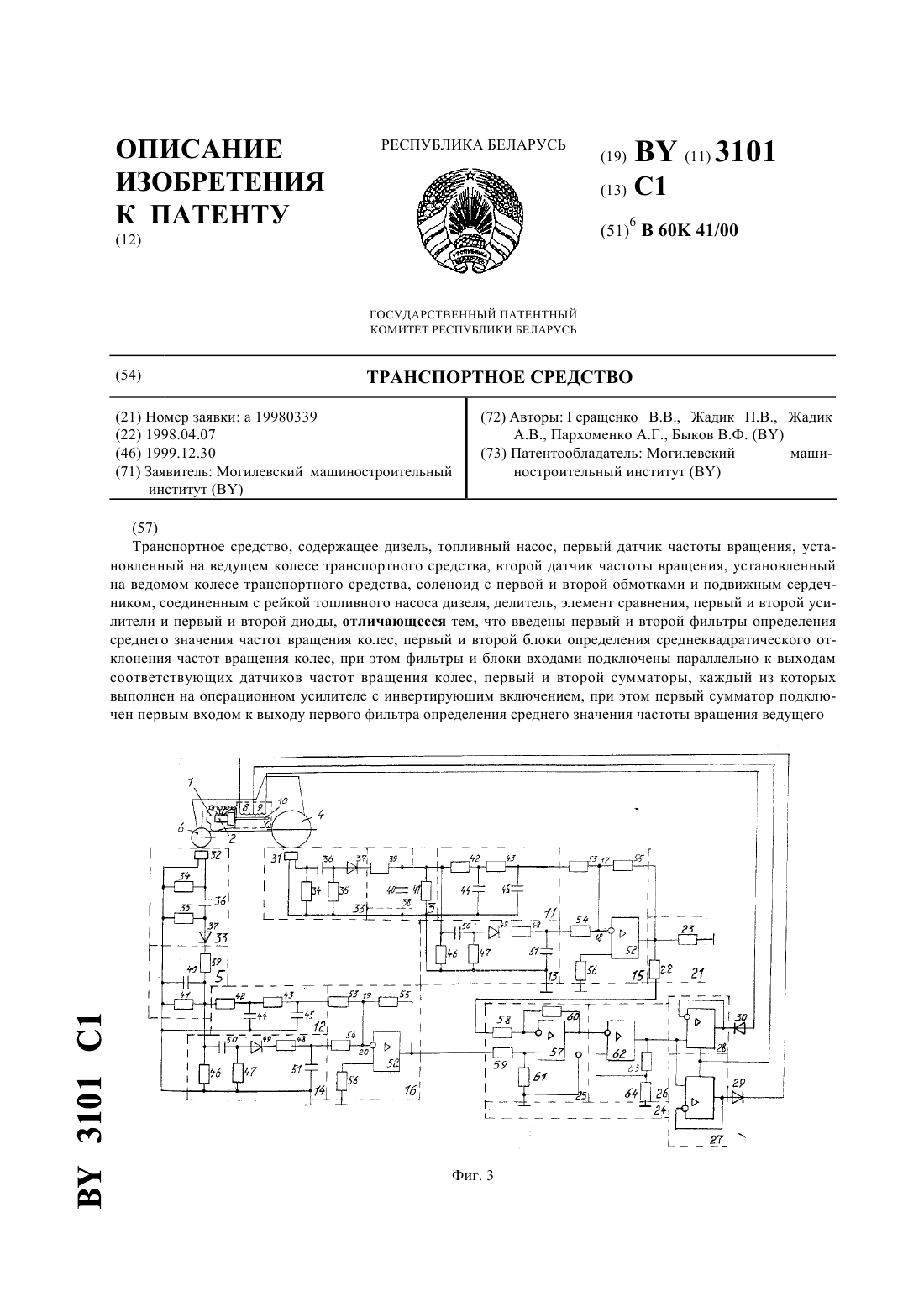
Номер патента: 3101
Опубликовано: 30.12.1999
Авторы: Жадик Александр Васильевич, Пархоменко Александр Георгиевич, Геращенко Василий Васильевич, Жадик Павел Васильевич, Быков Василий Филиппович
МПК: B60K 41/00
Метки: транспортное, средство
Текст:
...второй сумматоры, каждый из которых выполнен на операционном усилителе с инвертирующим включением, при этом первый сумматор подключен первым входом к выходу первого фильтра определения среднего значения частоты вращения ведущего колеса, вторым входом - к выходу первого блока определения среднеквадратического отклонения частоты вращения ведущего колеса, второй сумматор подключен первым входом к выходу второго фильтра определения среднего...
Предыдущий патент: Устройство универсальной защиты от аварий при обрыве или выгорании нулевого провода
Следующий патент: Синтезатор гармонических электрических колебаний
Случайный патент: Ингибитор вируса гепатита А