Устройство имитации работы датчика угловой скорости вращения
Номер патента: U 5024
Опубликовано: 28.02.2009
Текст
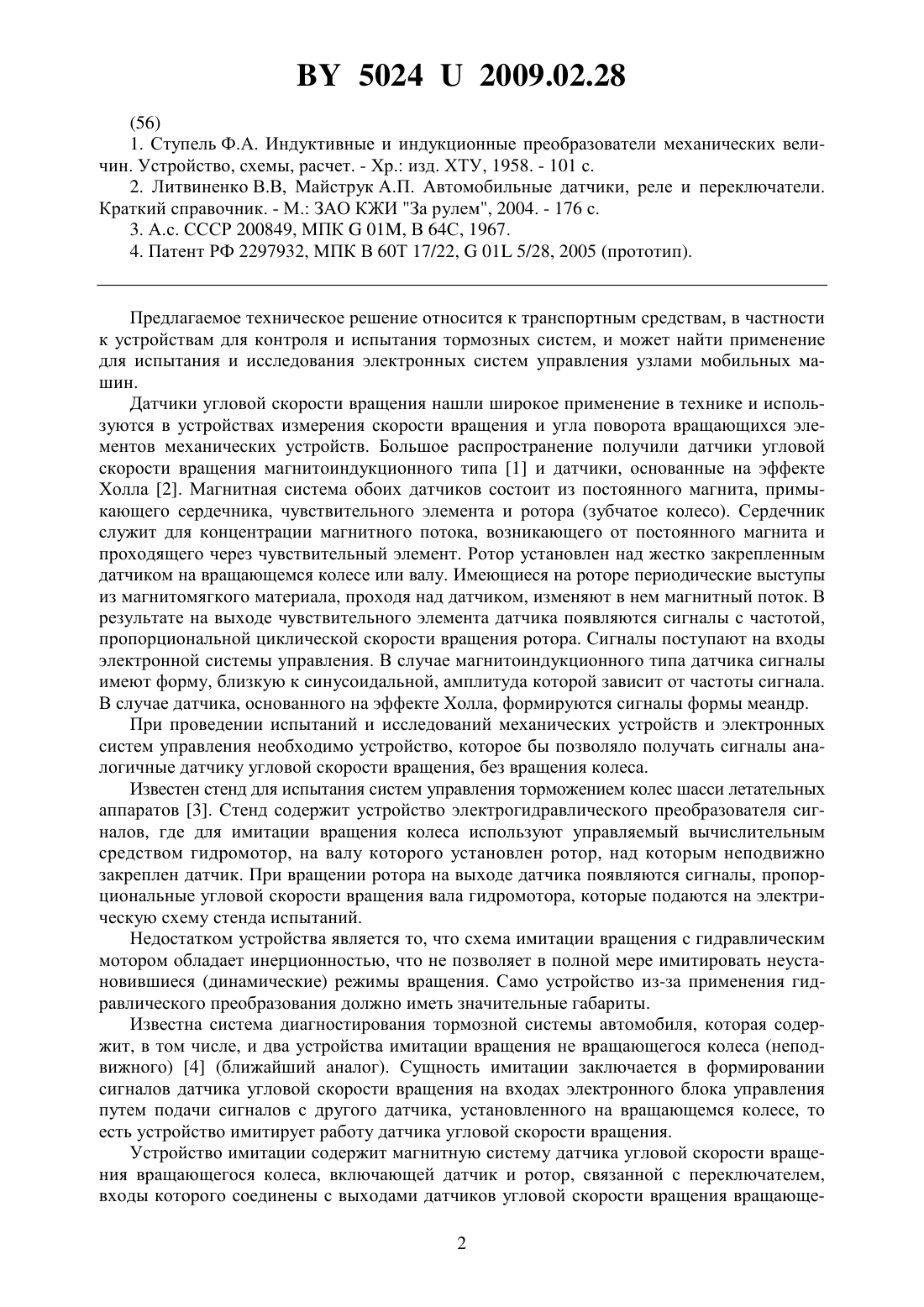
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ИМИТАЦИИ РАБОТЫ ДАТЧИКА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Ляхов Сергей Владимирович Белоус Михаил Михайлович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Устройство имитации работы датчика угловой скорости вращения, содержащее магнитную систему датчика угловой скорости вращения, связанную с переключателем и электронным блоком управления, а также с исполнительными устройствами, персональный компьютер, и соединенный с ним шлейф, отличающееся тем, что оно дополнительно снабжено блоком преобразования, связанным шлейфом с персональным компьютером, а также соединительным элементом, связывающим вместе непосредственно блок преобразования, электронный блок управления и исполнительные устройства, причем магнитная система датчика выполнена в виде электромагнитной катушки и датчика, помещенных в магнитопровод, и связанной с одной стороны с блоком преобразования, а с другой - через переключатель с входом электронного блока управления.(56) 1. Ступель Ф.А. Индуктивные и индукционные преобразователи механических величин. Устройство, схемы, расчет. - Хр. изд. ХТУ, 1958. - 101 с. 2. Литвиненко В.В, Майструк А.П. Автомобильные датчики, реле и переключатели. Краткий справочник. - М. ЗАО КЖИ За рулем, 2004. - 176 с. 3. А.с. СССР 200849, МПК 01, В 64 С, 1967. 4. Патент РФ 2297932, МПК В 60 Т 17/22,01 5/28, 2005 (прототип). Предлагаемое техническое решение относится к транспортным средствам, в частности к устройствам для контроля и испытания тормозных систем, и может найти применение для испытания и исследования электронных систем управления узлами мобильных машин. Датчики угловой скорости вращения нашли широкое применение в технике и используются в устройствах измерения скорости вращения и угла поворота вращающихся элементов механических устройств. Большое распространение получили датчики угловой скорости вращения магнитоиндукционного типа 1 и датчики, основанные на эффекте Холла 2. Магнитная система обоих датчиков состоит из постоянного магнита, примыкающего сердечника, чувствительного элемента и ротора (зубчатое колесо). Сердечник служит для концентрации магнитного потока, возникающего от постоянного магнита и проходящего через чувствительный элемент. Ротор установлен над жестко закрепленным датчиком на вращающемся колесе или валу. Имеющиеся на роторе периодические выступы из магнитомягкого материала, проходя над датчиком, изменяют в нем магнитный поток. В результате на выходе чувствительного элемента датчика появляются сигналы с частотой,пропорциональной циклической скорости вращения ротора. Сигналы поступают на входы электронной системы управления. В случае магнитоиндукционного типа датчика сигналы имеют форму, близкую к синусоидальной, амплитуда которой зависит от частоты сигнала. В случае датчика, основанного на эффекте Холла, формируются сигналы формы меандр. При проведении испытаний и исследований механических устройств и электронных систем управления необходимо устройство, которое бы позволяло получать сигналы аналогичные датчику угловой скорости вращения, без вращения колеса. Известен стенд для испытания систем управления торможением колес шасси летательных аппаратов 3. Стенд содержит устройство электрогидравлического преобразователя сигналов, где для имитации вращения колеса используют управляемый вычислительным средством гидромотор, на валу которого установлен ротор, над которым неподвижно закреплен датчик. При вращении ротора на выходе датчика появляются сигналы, пропорциональные угловой скорости вращения вала гидромотора, которые подаются на электрическую схему стенда испытаний. Недостатком устройства является то, что схема имитации вращения с гидравлическим мотором обладает инерционностью, что не позволяет в полной мере имитировать неустановившиеся (динамические) режимы вращения. Само устройство из-за применения гидравлического преобразования должно иметь значительные габариты. Известна система диагностирования тормозной системы автомобиля, которая содержит, в том числе, и два устройства имитации вращения не вращающегося колеса (неподвижного) 4 (ближайший аналог). Сущность имитации заключается в формировании сигналов датчика угловой скорости вращения на входах электронного блока управления путем подачи сигналов с другого датчика, установленного на вращающемся колесе, то есть устройство имитирует работу датчика угловой скорости вращения. Устройство имитации содержит магнитную систему датчика угловой скорости вращения вращающегося колеса, включающей датчик и ротор, связанной с переключателем,входы которого соединены с выходами датчиков угловой скорости вращения вращающе 2 50242009.02.28 гося и не вращающегося колес. Устройство для подачи сигналов на электронный блок управления, имитирующих вращение не вращающегося колеса, входы которого соединены с выходами для датчика вращающегося колеса. Устройство для подачи сигналов на электронный блок управления производит усиление этих сигналов. Входы для датчиков вращающегося и не вращающегося колес электронного блока управления соответственно соединены с выходами устройства для подачи на электронный блок управления сигналов,имитирующих вращение не вращающихся колес. Исполнительные устройства соединены с выходами электронного блока управления. Вращающееся колесо, связанное с исполнительными устройствами, связанное также с магнитной системой датчика угловой скорости вращения. Шлейф, один конец которого соединен с электронным блоком управления, а другой с персональным компьютером. Устройство работает следующим образом. Перед началом имитации переключателем отключают от электронного блока управления датчики угловой скорости вращения не вращающегося и вращающегося колес и подключают датчик вращающегося колеса к устройству для передачи на электронный блок управления сигналов, имитирующих вращение не вращающегося колеса. На персональном компьютере запускают команду начала имитации. Персональный компьютер подает через шлейф электронному блоку управления необходимые команды о начале режима имитации. При вращении колеса на выходах датчика угловой скорости вращения появляются сигналы,которые через переключатель передаются устройству для подачи на электронный блок управления сигналов, имитирующих вращение не вращающегося колеса. Устройство производит усиление сигналов и подает их на входы электронного блока управления для датчика не вращающегося колеса и на входы для датчика вращающегося колеса без усиления. Электронный блок управления, получая сигналы, в соответствии с заложенным алгоритмом, формирует на своих выходах электрические сигналы управления, поступающие на исполнительные устройства. Исполнительные устройства управляют угловой скоростью вращающегося колеса. Недостатками указанного устройства имитации следующие. Поступающие сигналы на входы вращающегося и не вращающегося колес электронного блока управления одинаковы. Это не соответствует реальному режиму работы электронного блока управления. В результате чего электронный блок управления выполняет заложенный алгоритм управления некорректно. Это приводит к неправильной оценке результатов испытаний и исследований. Устройство для подачи сигналов на электронный блок управления при усилении этих сигналов может искажать их и негативно воздействовать на входы электронного блока управления. Это происходит потому, что выходы этого устройства по своим электрическим параметрам не соответствуют параметрам датчика угловой скорости вращения, что будет сказываться на точности проведения самодиагностики электронного блока управления. Задачей предлагаемого технического решения является повышение точности результатов испытаний и исследований электронных систем управления, расширение функциональных возможностей для технических средств, использующих устройство имитации работы датчика угловой скорости вращения. Задача решается следующим образом. Известное устройство имитации работы датчика угловой скорости вращения содержит магнитную систему датчика угловой скорости вращения, связанную с переключателем и электронным блоком управления, а также с исполнительными устройствами, персональный компьютер и соединенный с ним шлейф. Согласно предлагаемому техническому решению устройство дополнительно снабжено блоком преобразования, связанным шлейфом с персональным компьютером, а также соединительным элементом, связывающим непосредственно блок преобразования, электронный блок управления и исполнительные устройства, причем магнитная система датчика угловой скорости вращения выполнена в виде электромагнитной катушки и датчика, помещенных в магнитопровод, и связанной с одной 3 50242009.02.28 стороны с блоком преобразования, а с другой - через переключатель с входами электронного блока управления. Выполнение магнитной системы датчика в виде электромагнитной катушки и датчика,помещенных в магнитопровод, обеспечивает формирование сигналов и электрические режимы работы входных цепей электронного блока управления. Переключатель, связанный непосредственно с указанным датчиком, позволяет переключиться на режим имитации. Электронный блок управления обеспечивает обработку входных сигналов и, в соответствии с заложенным алгоритмом, формирование на выходах электрических сигналов управления,поступающих на исполнительные устройства. Исполнительные устройства позволяют осуществлять управление вращением колесами и проводить самодиагностику электронному блоку управления. Соединительный элемент позволяет, подключаясь к выходам электронного блока управления и входам исполнительных устройств, передавать электрические сигналы управления на блок преобразования. Блок преобразования, получая электрические сигналы управления, обеспечивает преобразование их в цифровые сигналы и передачу их через шлейф персональному компьютеру, а также на основании цифровых сигналов, поступающих через шлейф от персонального компьютера, обеспечивает формирование электрических аналоговых сигналов для электромагнитной катушки. Персональный компьютер, получая цифровые сигналы от блока преобразования, по заложенным математическим моделям вращения колеса и датчика угловой скорости вращения позволяет вычислить значения синусоидальной формы сигналов датчика угловой скорости вращения и передавать их в виде цифровых сигналов через шлейф блоку преобразования. Шлейф обеспечивает передачу цифровых сигналов между блоком преобразования и персональным компьютером. Электромагнитная катушка позволяет сформировать магнитный поток и магнитопроводом передавать его в датчик угловой скорости вращения, так что на выходах датчика появляются электрические сигналы, аналогичные датчику угловой скорости вращения вращающегося колеса. В результате достигается повышение точности имитации работы датчика, а, следовательно, повышение точности результатов испытаний и исследований электронных систем управления, расширение функциональных возможностей для технических средств, использующих указанное устройство. На фигуре показана блок-схема предлагаемого устройства имитации работы датчика угловой скорости вращения. Устройство содержит электромагнитную катушку 1 и датчик 2 угловой скорости вращения, которые помещены в магнитопровод 3. Входы электромагнитной катушки 1 соединены с выходами блока 4 преобразования. Входы переключателя 5 подсоединены к выходам датчика 2, а его выходы подсоединены к входам электронного блока 6 управления. Соединительный элемент 7 связывает выходы электронного блока 6 управления, входы исполнительных устройств 8 и входы блока преобразования 4. Шлейф 9, один конец которого соединен с персональным компьютером 10, вторым концом связан с блоком 4 преобразования. Устройство работает следующим образом. Датчик 2 угловой скорости вращения вставляют в магнитопровод 3, в котором находится магнитная катушка 1. Переключателем 5 подсоединяют к входам электронного блока 6 управления датчик 2. Выходы блока 6, входы исполнительных устройств 8 и входы блока 4 преобразования соединяют вместе соединительным элементом 7. Запускают на персональном компьютере 10 циклическое вычисление математических моделей вращения колеса и датчика угловой скорости вращения вращающегося колеса, в результате чего вычисляются значения формы сигналов датчика. Полученные значения преобразуют с помощью персонального компьютера 10 в цифровые сигналы, которые передают через шлейф 7 блоку 4 преобразования. Блок 4, используя полученные цифровые сигналы, формирует электрические аналоговые сигналы и передает их на электромагнитную катушку 1. В катушке 1 возникает магнитный поток, который магнитопроводом 3 передается датчику 2 4 50242009.02.28 угловой скорости вращения, на выходах которого появляются сигналы. Сигналы через переключатель 5 поступают на входы электронного блока 6 управления, который обрабатывает их согласно заложенному алгоритму и формирует на выходах электрические сигналы. Сигналы одновременно поступают на исполнительные устройства 8 и через соединительный элемент 7 - на блок 4 преобразования. Блок 4 преобразует электрические сигналы управления в цифровые сигналы, и через шлейф 9 передает их персональному компьютеру 10, который, используя их, производит следующий цикл вычислений и передачи. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: B60T 17/00, B60T 8/00
Метки: вращения, имитации, скорости, устройство, работы, угловой, датчика
Код ссылки
<a href="https://by.patents.su/5-u5024-ustrojjstvo-imitacii-raboty-datchika-uglovojj-skorosti-vrashheniya.html" rel="bookmark" title="База патентов Беларуси">Устройство имитации работы датчика угловой скорости вращения</a>
Устройство для имитации эхо-импульсов ультразвукового дефектоскопа

Номер патента: U 2954
Опубликовано: 30.08.2006
Авторы: Добров Александр Анатольевич, Павловский Александр Александрович
МПК: G01N 29/00
Метки: имитации, устройство, эхо-импульсов, дефектоскопа, ультразвукового
Текст:
...характеристик ультразвуковых дефектоскопов. Причина этого в том, что кварцевый генератор не синхронизируется внешними синхроимпульсами, а работает в автоколебательном режиме. В результате чего фаза синусоидального сигнала с выхода генератора задающего не синхронизируется внешними синхроимпульсами электронного блока ультразвукового дефектоскопа и, как следствие,происходит хаотическое перемещение сигнала на экране ультразвукового...
Устройство для измерения скорости вращения вала
Номер патента: 4945
Опубликовано: 30.03.2003
Авторы: Костюшко Анатолий Николаевич, Башаримова Валентина Николаевна, Геращенко Александр Васильевич, Серков Александр Владимирович, Миронов Константин Данилович
МПК: G01P 3/481
Метки: вращения, скорости, измерения, вала, устройство
Текст:
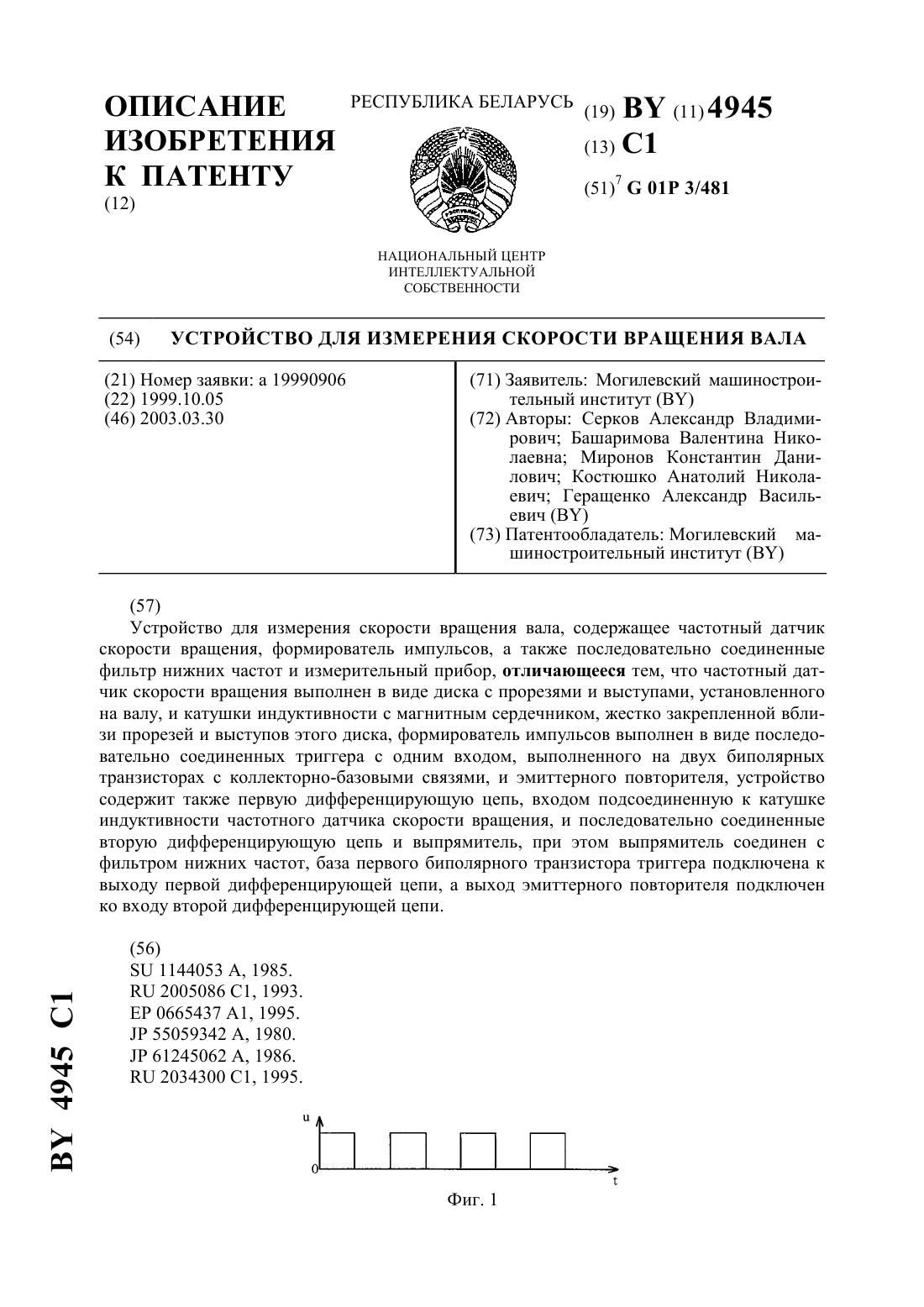
...с одним входом, выполненного на двух биполярных транзисторах с коллекторно-базовыми связями, и эмиттерного повторителя, устройство содержит также первую дифференцирующую цепь, входом подсоединенную к катушке индуктивности частотного датчика скорости вращения, и последовательно соединенные вторую дифференцирующую цепь и выпрямитель, при этом выпрямитель соединен с фильтром нижних частот, база первого биполярного транзистора триггера...
Система для имитации эхо-импульсов ультразвукового дефектоскопа

Номер патента: U 3433
Опубликовано: 30.04.2007
Авторы: Добров Александр Анатольевич, Павловский Александр Александрович
МПК: G01N 29/00
Метки: эхо-импульсов, система, дефектоскопа, имитации, ультразвукового
Текст:
...контрольных образцов для определения длины контролируемого участка и координаты дефекта на контролируемом объекте. Аналогов заявляемой системы для имитации эхо-импульсов ультразвукового дефектоскопа не обнаружено. Задачей предлагаемого технического решения является создание системы для имитации эхо-импульсов ультразвукового дефектоскопа, которая позволит проводить испытания и калибровку электронного блока автоматизированных ультразвуковых...
Устройство для регистрации частоты и направления вращения ротора электродвигателя
Номер патента: 9484
Опубликовано: 30.06.2007
Авторы: Стрешинский Игорь Аркадьевич, Ушаков Владимир Сергеевич, Искандаров Олег Ришатович, Митюков Андрей Алексеевич
МПК: G01P 15/09, G01P 3/42
Метки: регистрации, направления, частоты, устройство, ротора, вращения, электродвигателя
Текст:
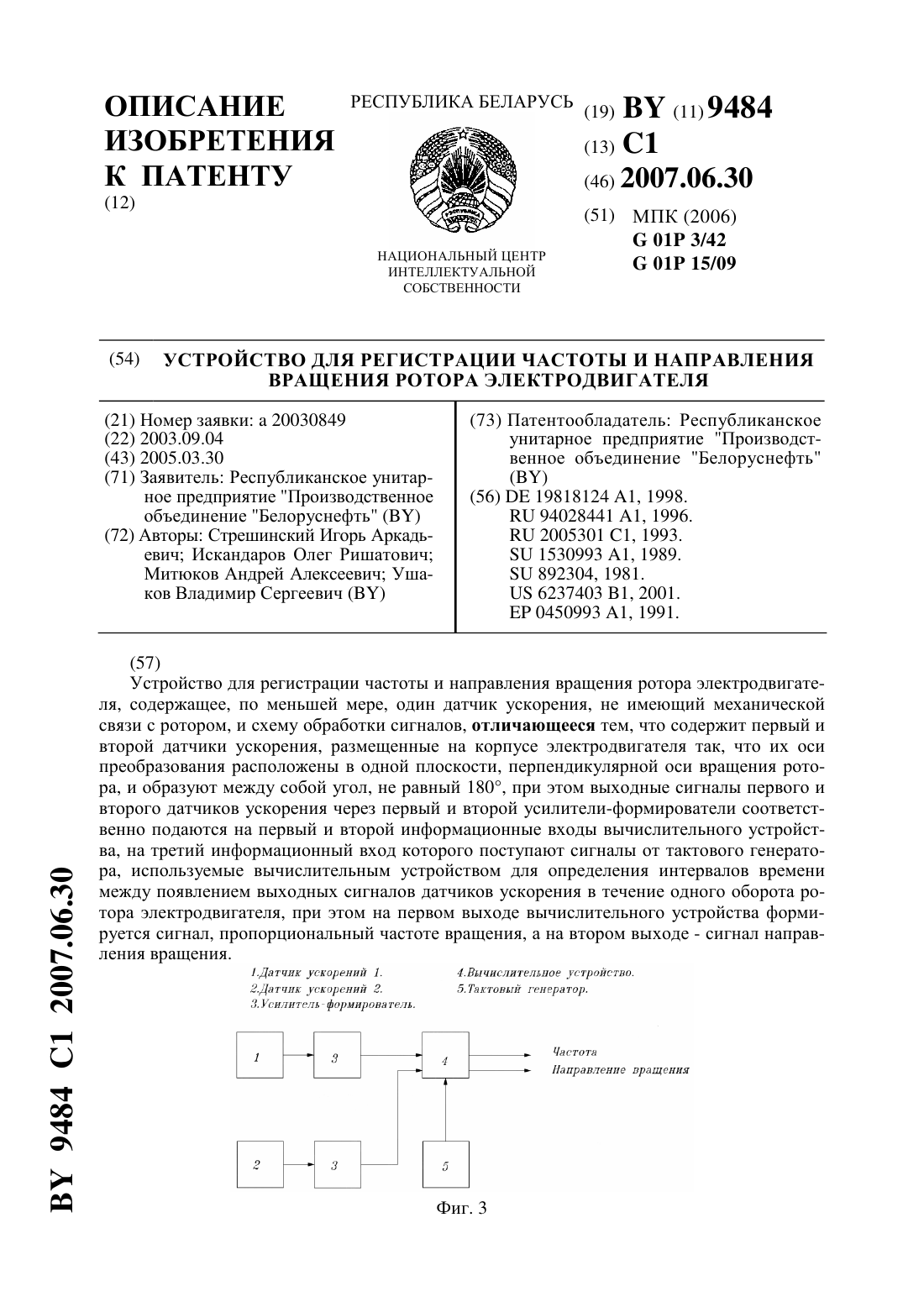
...невозможность определения направления вращения. Задачей предлагаемого изобретения является создание устройства для регистрации частоты и направления вращения ротора электродвигателя, не имеющего механической связи с ротором электродвигателя. Задача решается следующим образом. Поскольку вибрации корпуса электродвигателя вызваны наличием дисбаланса ротора электродвигателя, то частота первой гармоники виброускорения корпуса электродвигателя...
Устройство имитации движущегося объекта для изучения технических характеристик радиопоглощающих покрытий и материалов
Номер патента: U 2937
Опубликовано: 30.08.2006
Авторы: Моисеев Василий Викторович, Парахневич Александр Викторович, Борботько Тимофей Валентинович, Виноградов Александр Евгеньевич, Шевяков Алексей Владимирович, Хижняк Александр Вячеславович
МПК: F41J 5/00
Метки: покрытий, имитации, радиопоглощающих, характеристик, объекта, изучения, устройство, технических, движущегося, материалов
Текст:
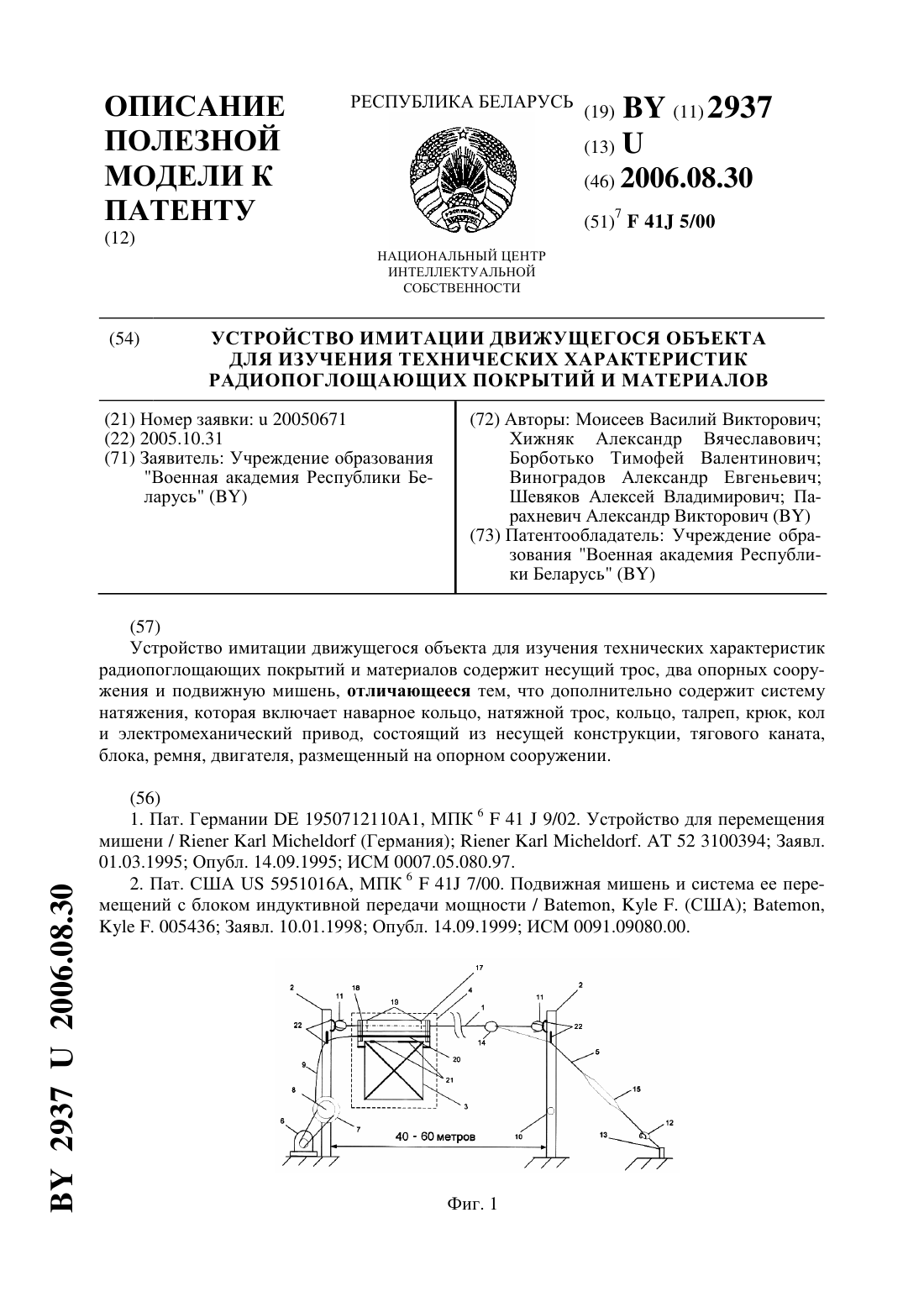
...специальных приспособлений, либо инструмента обеспечить возможность вариации элементами устройства, модульность и взаимозаменяемость с другими типовыми элементами или модулями похожих устройств. Задача решается за счет того, что в предлагаемом устройстве, содержащем несущий трос, два опорных сооружения и подвижную мишень, отличающееся тем, что дополнительно использованы система натяжения, которая включает наварное кольцо, натяжной...
Предыдущий патент: Устройство для оценки функции равновесия человека
Следующий патент: Отопительная печь
Случайный патент: Композиции из веществ с фунгицидной активностью