Система автоматизированного видеонаблюдения
Текст
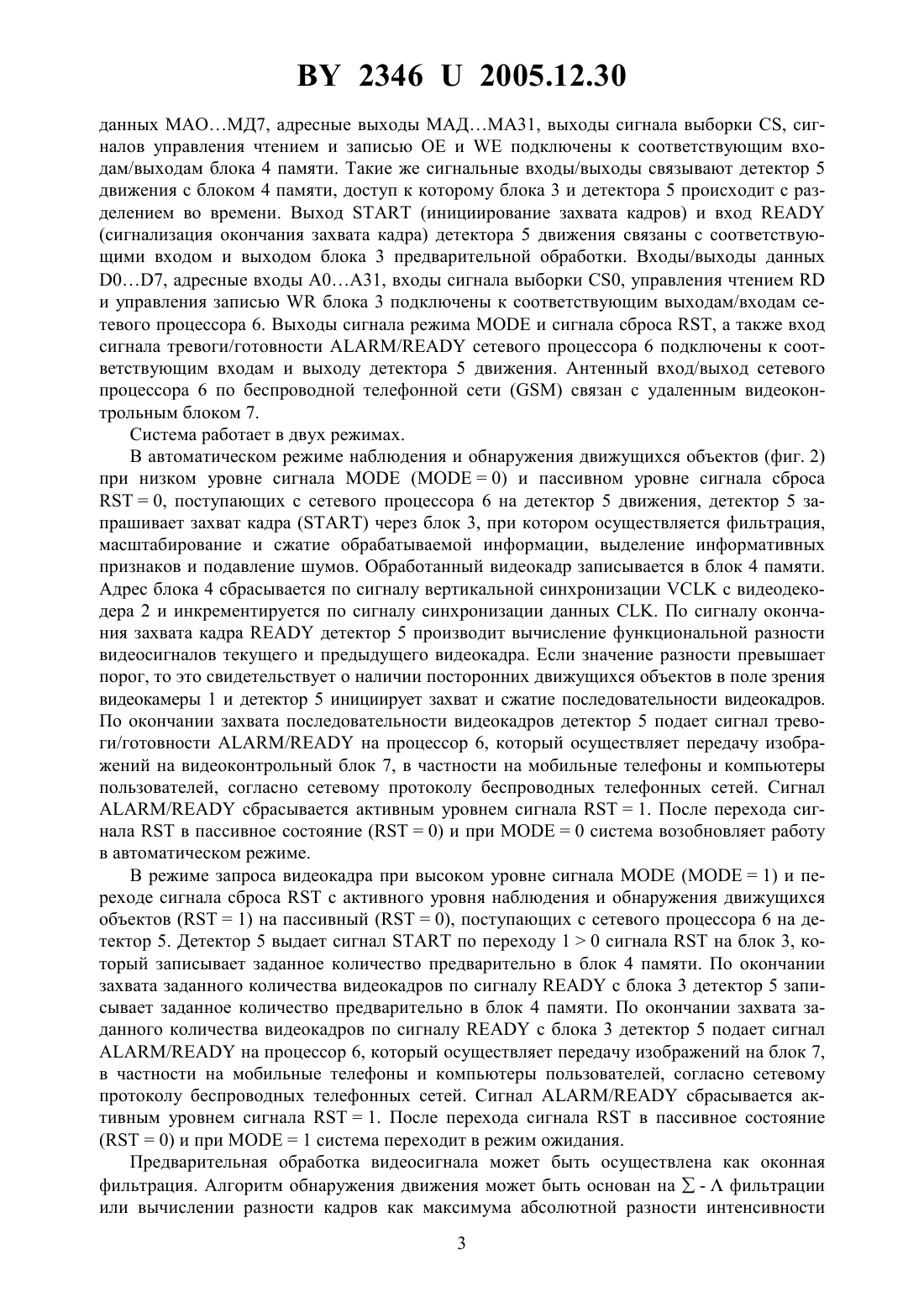
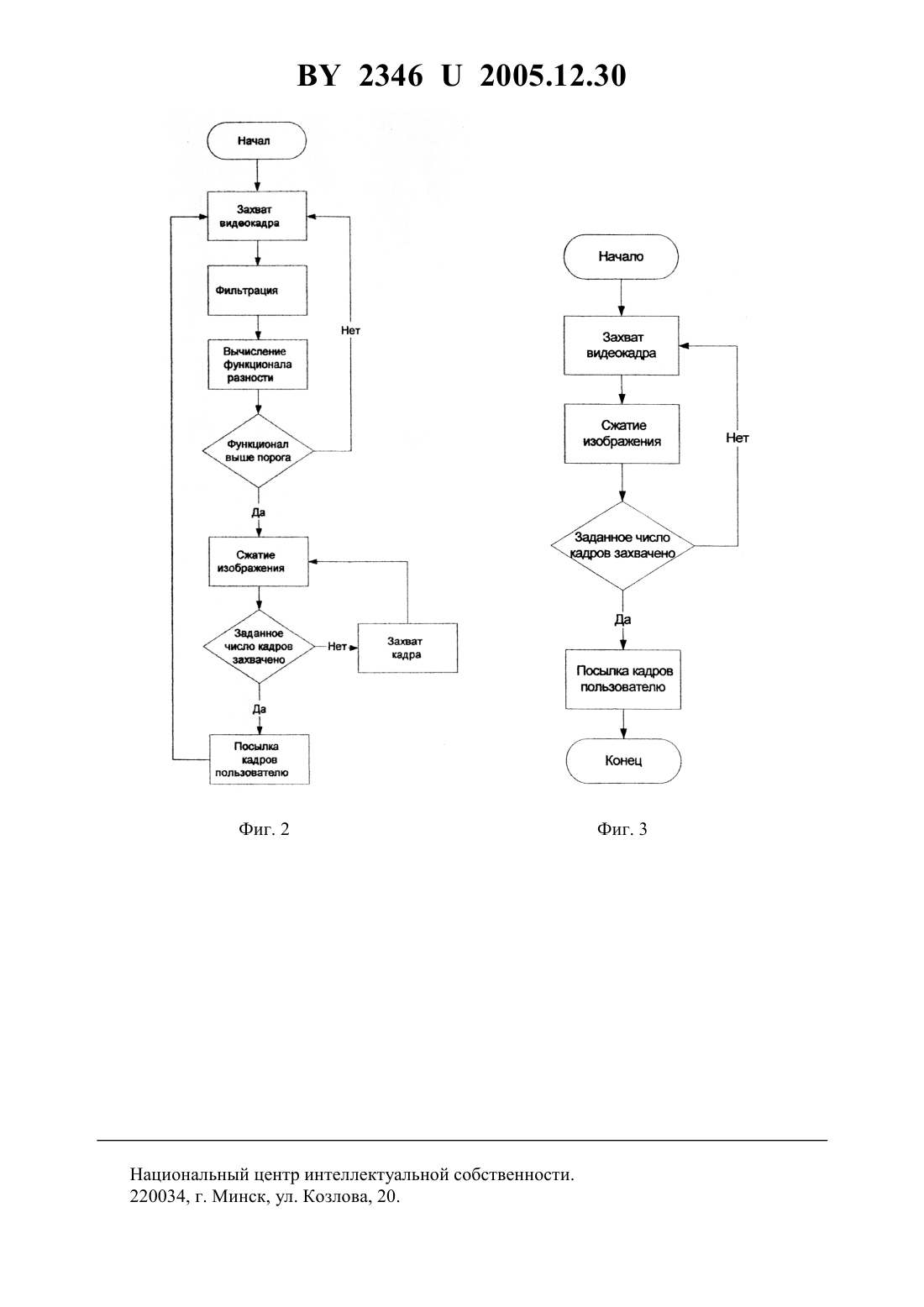
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Климчинский Игорь Леонидович(72) Автор Климчинский Игорь Леонидович(73) Патентообладатель Климчинский Игорь Леонидович(57) Система автоматизированного видеонаблюдения, содержащая, по меньшей мере, одну видеокамеру, детектор движения, связанный с блоком памяти, и видеоконтрольный блок,отличающаяся тем, что введены блок предварительной обработки видеосигналов, предназначенный для фильтрации, масштабирования и сжатия видеосигналов одиночных и последовательностей видеокадров, и сетевой процессор, а к выходу каждой из видеокамер подключен видеодекодер, выходы данных и синхронизации которого подключены к соответствующим входам блока предварительной обработки, входы и выходы которого подключены к соответствующим выходам и входам блока памяти и сетевого процессора, при этом детектор движения, предназначенный для формирования функциональной разности видеосигналов текущего и предыдущего видеокадра, связан с блоком предварительной обработки и через сетевой процессор с удаленным видеоконтрольным блоком, в частности мобильным телефоном или компьютером. 23462005.12.30 Полезная модель относится к охранным средствам, в частности к системам для контроля, наблюдения и обнаружения посторонних движущихся объектов в поле зрения видеокамер, и преимущественно может быть использована для охраны и наблюдения за недвижимостью, например офисами, дачами, коттеджами, квартирами и т.п. Известна система автоматизированного обнаружения динамических объектов, содержащая более одного датчика сигналов, в качестве которого установлены спаренные видеокамеры, процессор обработки сигналов, контрольную панель и исполнительное устройство подачи тревоги, при этом в процессор дополнительно введены два статических и два динамических предобработчика, детектор движущихся объектов, статический и динамический узел принятия решений 1. Однако при сложности реализации система не обеспечивает контроль удаленных объектов. Наиболее близкой по технической сущности является охранная телевизионная система,содержащая последовательно соединенные видеокамеру, схему автоматической сигнализации о наличии движущегося объекта в поле зрения видеокамеры и видеоконтрольное устройство. Видеосигналы двух последовательных кадров заводятся в соответствующие запоминающие устройства и сравниваются компаратором в схеме автоматической сигнализации. Превышение порога свидетельствует о наличии посторонних движущихся объектов. Схема автоматической сигнализации эквивалентна детектору движения, а видеоконтрольное устройство эквивалентно видеоконтрольному блоку 2. Недостатком известного устройства является ограниченное расстояние возможного визуального контроля удаленного объекта, чувствительность к вариациям освещенности объекта наблюдения, низкая помехозащищенность. Технической задачей настоящей полезной модели является обеспечение возможности визуального контроля удаленного объекта, снижение чувствительности устройства к вариациям освещенности объекта наблюдения, снижение уровня шумов. Поставленная техническая задача достигается тем, что в систему автоматизированного видеонаблюдения, содержащую, по меньшей мере, одну видеокамеру, детектор движения,связанный с блоком памяти, и видеоконтрольный блок, введены блок предварительной обработки видеосигналов, предназначенный для фильтрации, масштабирования и сжатия видеосигналов одиночных и последовательностей видеокадров, и сетевой процессор, а к выходу каждой из видеокамер подключен видеодекодер, выходы данных и синхронизации которого подключены к соответствующим входам блока предварительной обработки,входы и выходы которого подключены к соответствующим выходам и входам блока памяти и сетевого процессора, при этом детектор движения, предназначенный для формирования функциональной разности видеосигналов текущего и предыдущего видеокадра,связан с блоком предварительной обработки и через сетевой процессор с удаленным видеоконтрольным блоком, в частности мобильным телефоном или компьютером. Технический результат заявляемой системы выражен в видеонаблюдении удаленных объектов по беспроводным каналам связи, улучшении соотношения сигнал-шум и уменьшении чувствительности алгоритма сравнения видеокадров к вариациям освещенности объекта наблюдения. На фиг. 1 представлена блок-схема заявляемой системы автоматизированного видеонаблюдения, на фиг. 2 - алгоритм работы системы в автоматическом режиме наблюдения и обнаружения движущихся объектов (МОДЕ 0), на фиг. 3 - алгоритм работы системы в режиме запроса видеокадра пользователем (МОДЕ 1). Система автоматизированного видеонаблюдения содержит, по меньшей мере, одну видеокамеру 1, видеовыход которой подключен к входу видеодекодера 2, выходы данных О 7, вертикальной сигнализациии синхронизации данныхкоторого подключены к соответствующим входам блока 3 предварительной обработки. Входы/выходы 2 23462005.12.30 данных МАОМД 7, адресные выходы МАДМА 31, выходы сигнала выборки , сигналов управления чтением и записьюиподключены к соответствующим входам/выходам блока 4 памяти. Такие же сигнальные входы/выходы связывают детектор 5 движения с блоком 4 памяти, доступ к которому блока 3 и детектора 5 происходит с разделением во времени. Выход(инициирование захвата кадров) и вход(сигнализация окончания захвата кадра) детектора 5 движения связаны с соответствующими входом и выходом блока 3 предварительной обработки. Входы/выходы данных 07, адресные входы А 0 А 31, входы сигнала выборки 0, управления чтениеми управления записьюблока 3 подключены к соответствующим выходам/входам сетевого процессора 6. Выходы сигнала режимаи сигнала сброса , а также вход сигнала тревоги/готовности / сетевого процессора 6 подключены к соответствующим входам и выходу детектора 5 движения. Антенный вход/выход сетевого процессора 6 по беспроводной телефонной сетисвязан с удаленным видеоконтрольным блоком 7. Система работает в двух режимах. В автоматическом режиме наблюдения и обнаружения движущихся объектов (фиг. 2) при низком уровне сигнала(0) и пассивном уровне сигнала сброса 0, поступающих с сетевого процессора 6 на детектор 5 движения, детектор 5 запрашивает захват кадрачерез блок 3, при котором осуществляется фильтрация,масштабирование и сжатие обрабатываемой информации, выделение информативных признаков и подавление шумов. Обработанный видеокадр записывается в блок 4 памяти. Адрес блока 4 сбрасывается по сигналу вертикальной синхронизациис видеодекодера 2 и инкрементируется по сигналу синхронизации данных . По сигналу окончания захвата кадрадетектор 5 производит вычисление функциональной разности видеосигналов текущего и предыдущего видеокадра. Если значение разности превышает порог, то это свидетельствует о наличии посторонних движущихся объектов в поле зрения видеокамеры 1 и детектор 5 инициирует захват и сжатие последовательности видеокадров. По окончании захвата последовательности видеокадров детектор 5 подает сигнал тревоги/готовности / на процессор 6, который осуществляет передачу изображений на видеоконтрольный блок 7, в частности на мобильные телефоны и компьютеры пользователей, согласно сетевому протоколу беспроводных телефонных сетей. Сигнал/ сбрасывается активным уровнем сигнала 1. После перехода сигналав пассивное состояние (0) и при 0 система возобновляет работу в автоматическом режиме. В режиме запроса видеокадра при высоком уровне сигнала(1) и переходе сигнала сбросас активного уровня наблюдения и обнаружения движущихся объектов (1) на пассивный (0), поступающих с сетевого процессора 6 на детектор 5. Детектор 5 выдает сигналпо переходу 10 сигналана блок 3, который записывает заданное количество предварительно в блок 4 памяти. По окончании захвата заданного количества видеокадров по сигналус блока 3 детектор 5 записывает заданное количество предварительно в блок 4 памяти. По окончании захвата заданного количества видеокадров по сигналус блока 3 детектор 5 подает сигнал/ на процессор 6, который осуществляет передачу изображений на блок 7,в частности на мобильные телефоны и компьютеры пользователей, согласно сетевому протоколу беспроводных телефонных сетей. Сигнал / сбрасывается активным уровнем сигнала 1. После перехода сигналав пассивное состояние(0) и при 1 система переходит в режим ожидания. Предварительная обработка видеосигнала может быть осуществлена как оконная фильтрация. Алгоритм обнаружения движения может быть основан на-фильтрации или вычислении разности кадров как максимума абсолютной разности интенсивности 3 23462005.12.30 элементов изображения в текущем и предыдущем кадрах. Сжатие изображения может осуществляться, например, по алгоритмустандарта. Блок предварительной обработки и детектор движения целесообразно реализовать на Программируемой Логической Интегральной Схеме (ПЛИС), а сетевой процессор - на микроконтроллере и беспроводном модеме. Передача изображения может быть осуществлена по беспроводной телефонной сети , используя стандарты ТСРР,и , по известному сетевому протоколу. При реализации системы на базе беспроводной телефонной сетивозможны следующие варианты режимов работы. 1. Сетевой процессор 6 посылает видеокадры в ответ на сигнал тревоги (0). 1.1. Основной вариант работы. Подключениемодема к беспроводной телефонной сетии передача / на Интернетадрес пользователя. Еслиадрес пользователя не найден, то после истечения времени ожидания переход к запасному варианту работы 1.2. При этоммодемы на приемной и передающей стороне должны быть непрерывно всети. При регистрации всети можно получить динамический или статический адрес. Для осуществления основного варианта работы желателен статический адрес. Пользователь может изменить количество захватываемых кадров, например, посредством посылки конфигурационныхсообщений. 1.2. Запасной вариант работы. Прямой дозвон на модем пользователя ( соединение) и передача / пакетов наадрес пользователя. Возможен любой другой протокол, т.к. соединение в этом случае ничем не отличается от серийного интерфейса. Еслине устанавливается, то по истечении времени - ожидания переход к пункту 1.3. 1.3. Посылка- сообщений с кадрами. Если происходит ошибка, то по истечении времени ожидания переход к 1.4. 1.4. Посылканамодем пользователя. 2. Пользователь запрашивает заданное количество видеокадров с камеры (1). 2.1. Основной вариант работы. Подключение ксети и запрос (например) видеокадра с камеры через ТСР/рнаадрес системы. Еслиадрес пользователя не найден, то после истечения времени ожидания переход к пункту 2.2. При этоммодемы на приемной и передающей стороне должны быть непрерывно всети. При регистрации всети можно получить динамический или статический адрес. Для осуществления этого варианта работы желателен статический адрес. 2.2. Запасной вариант работы. Прямой дозвон на модем системы ( соединение) и запрос видеокадра с камеры через ТСРР наадрес устройства. Любой другой протокол возможен, т.к. соединение в этом случае ничем не отличается от сериального интерфейса. Еслине установлен, то по истечении времени ожидания - переход к 2.3. 2.3. Посылканамодем системы.модем системы имеет свой номер в сетии должен уметь исполнять команды из текста , например послатьс изображением илис состоянием датчиков и т.п. Сообщения с данными могут приниматься программами электронной почты общего назначения (необходимы программные модули расширения) или специализированными программами. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G08B 13/196
Метки: автоматизированного, система, видеонаблюдения
Код ссылки
<a href="https://by.patents.su/5-u2346-sistema-avtomatizirovannogo-videonablyudeniya.html" rel="bookmark" title="База патентов Беларуси">Система автоматизированного видеонаблюдения</a>
Вычислительная система
Номер патента: 1091
Опубликовано: 14.03.1996
Авторы: Фельдман Владимир Марткович, Пентковский Владимир Мстиславович, Зайцев Александр Иванович, Коваленко Сергей Саввич
МПК: G08F 15/16
Метки: вычислительная, система
Текст:
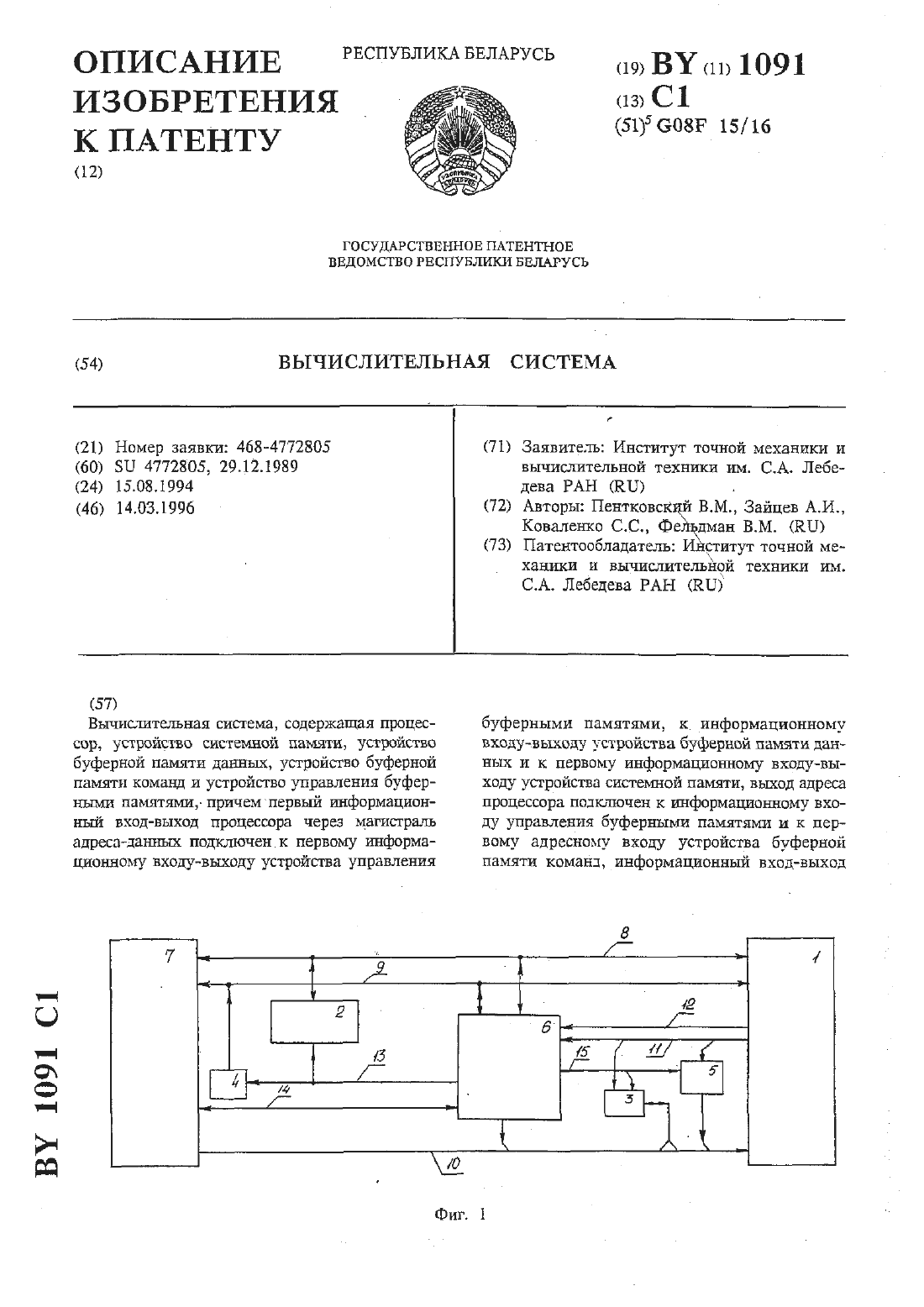
...памяти. Кроме того, отсутствиевозможности работы с различными типами операндов требует дисциплины программирования и дополнительного контроля при трансляции.Это усложняет процесс создания и отладки программ, т.е. эксплуатацию вьтчиечгттельной системы.Технической задачей является повышение быстродействия и надежности за счет контроля типов и форматов операндов при трансляции в процессоре.Достигается это тем, что в вычислительную систему,...
Устройство для автоматизированного контроля трубопроводов (варианты)
Номер патента: U 928
Опубликовано: 30.06.2003
Авторы: Исупов Михаил Анатольевич, Десятчиков Александр Петрович, Десятчиков Денис Александрович, Смирнов Анатолий Валентинович, Елисеев Владимир Николаевич, Слепов Андрей Михайлович, Карасёв Николай Алексеевич, Корнев Геннадий Анатольевич, Николаев Николай Владимирович, Кириченко Сергей Павлович, Чернов Сергей Викторович, Базаров Александр Юрьевич
МПК: G01M 3/00, G01N 27/72, F17D 5/00...
Метки: контроля, автоматизированного, трубопроводов, устройство, варианты
Текст:
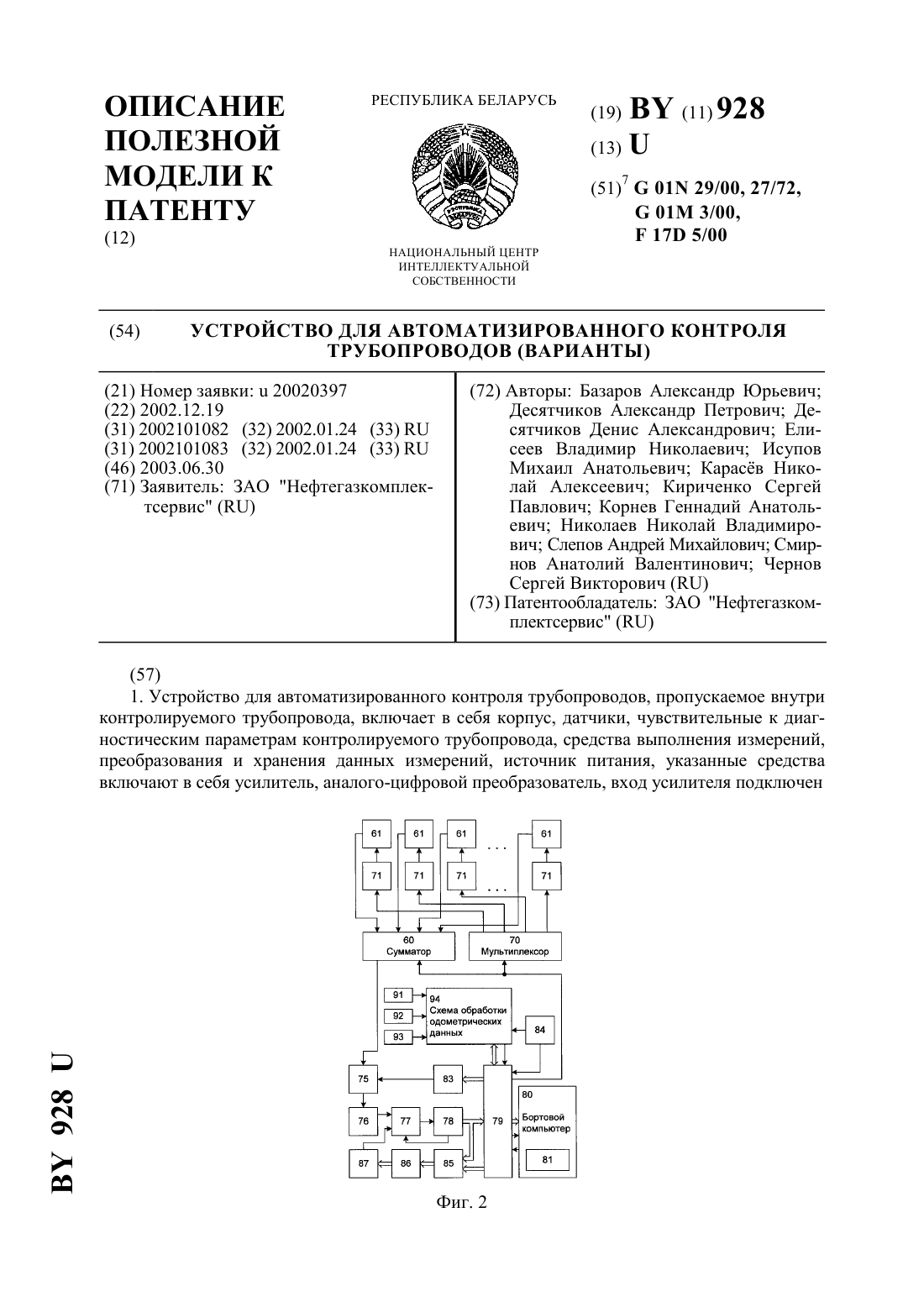
...преобразователя. 9. Устройство для автоматизированного контроля трубопроводов, пропускаемое внутри контролируемого трубопровода, включает в себя корпус, датчики, чувствительные к диагностическим параметрам контролируемого трубопровода, средства выполнения измерений, преобразования и хранения данных измерений, источник питания, указанные средства включают в себя усилитель, аналого-цифровой преобразователь, вход усилителя...
Акустико-эмиссионная система для диагностики промышленных объектов (варианты)
Номер патента: U 335
Опубликовано: 30.09.2001
Авторы: Гнетнев Юрий Иванович, Конон Альберт Викторович, Краснов Александр Александрович, Минаев Алексей Дмитриевич
МПК: G01N 29/14
Метки: диагностики, объектов, система, акустико-эмиссионная, варианты, промышленных
Текст:
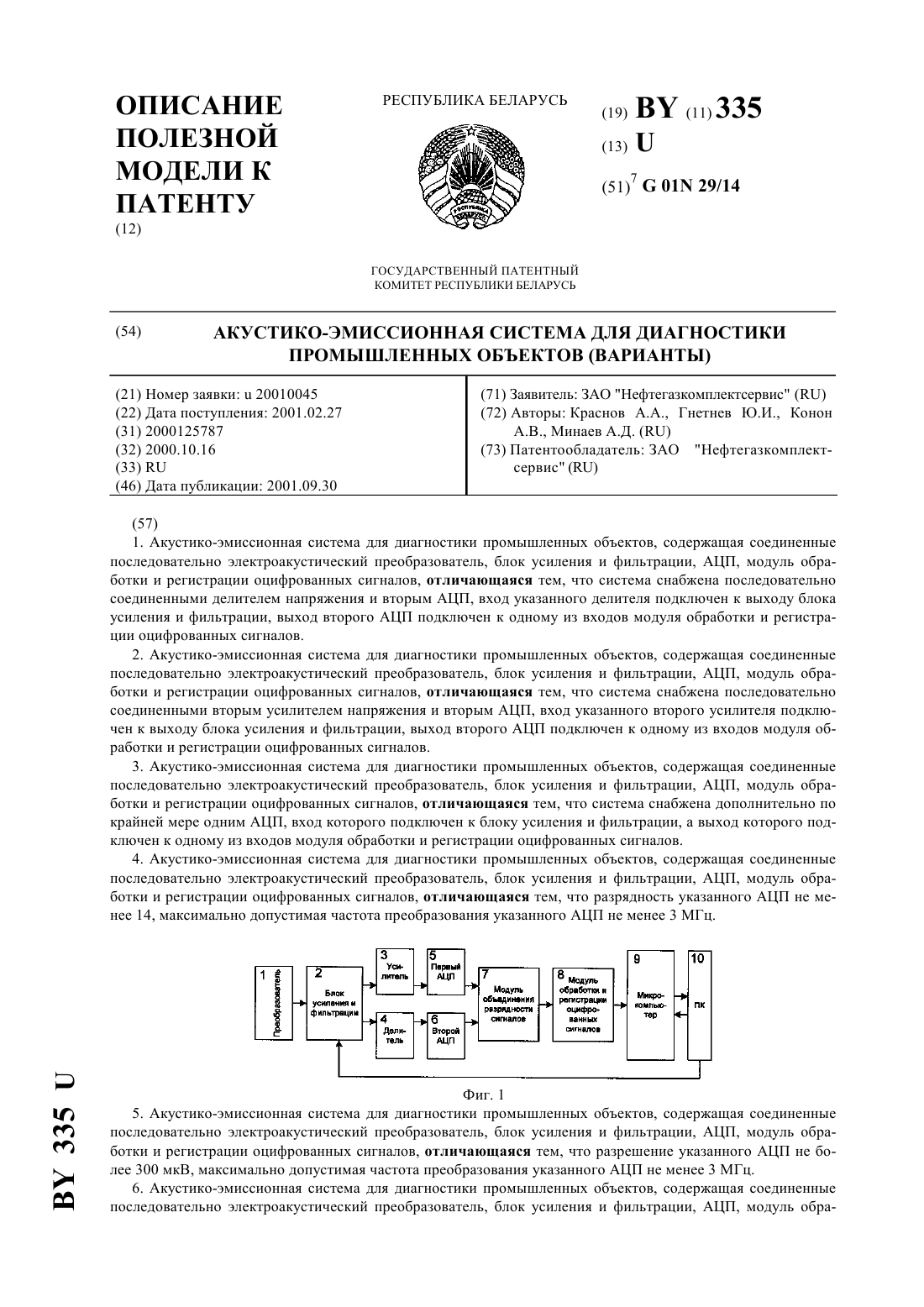
...система для диагностики промышленных объектов, содержащая управляющий компьютер, несколько подключенных к управляющему компьютеру модулей сбора данных акустической эмиссии, каждый из которых содержит разъем сопряжения с управляющим компьютером и несколько подключенных к указанному разъему каналов регистрации, каждый из которых содержит 6 335 последовательно соединенные электроакустический преобразователь, блок усиления и...
Система автоматического управления
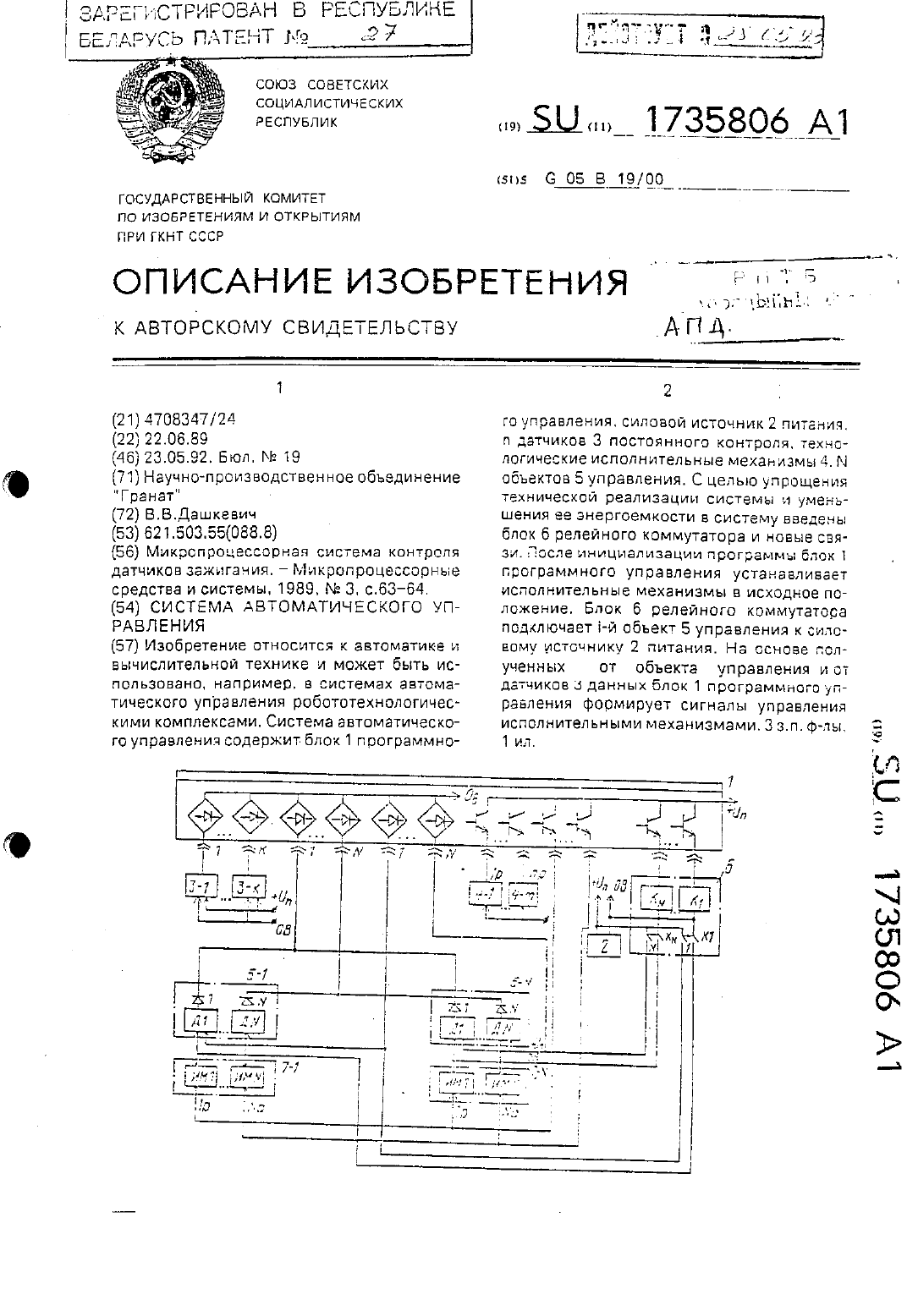
Номер патента: 27
Опубликовано: 30.05.1994
Автор: Дашкевич Валерий Викторович
МПК: G05B 19/00
Метки: автоматического, управления, система
Текст:
...программного управления. силовой источник 2 питания. датчики 3 постоянного контроля. технологические исПОЛНИТВЛЬНЫЕ МЭХЭНИЗМЫ 4, М групп датчиков 5 состояния. блок 6 релейной коммутации. М групп исполнительных механизмов 7.Блок 1 программного управления предНазначен для цихлового управления технологическим оборудованием. В качестве блока 1 программного управления. например, могут быть использованы системы управления промышленным роботом или...
Автоматическая система пожарной сигнализации и управления пожаротушением в подвижных транспортных средствах
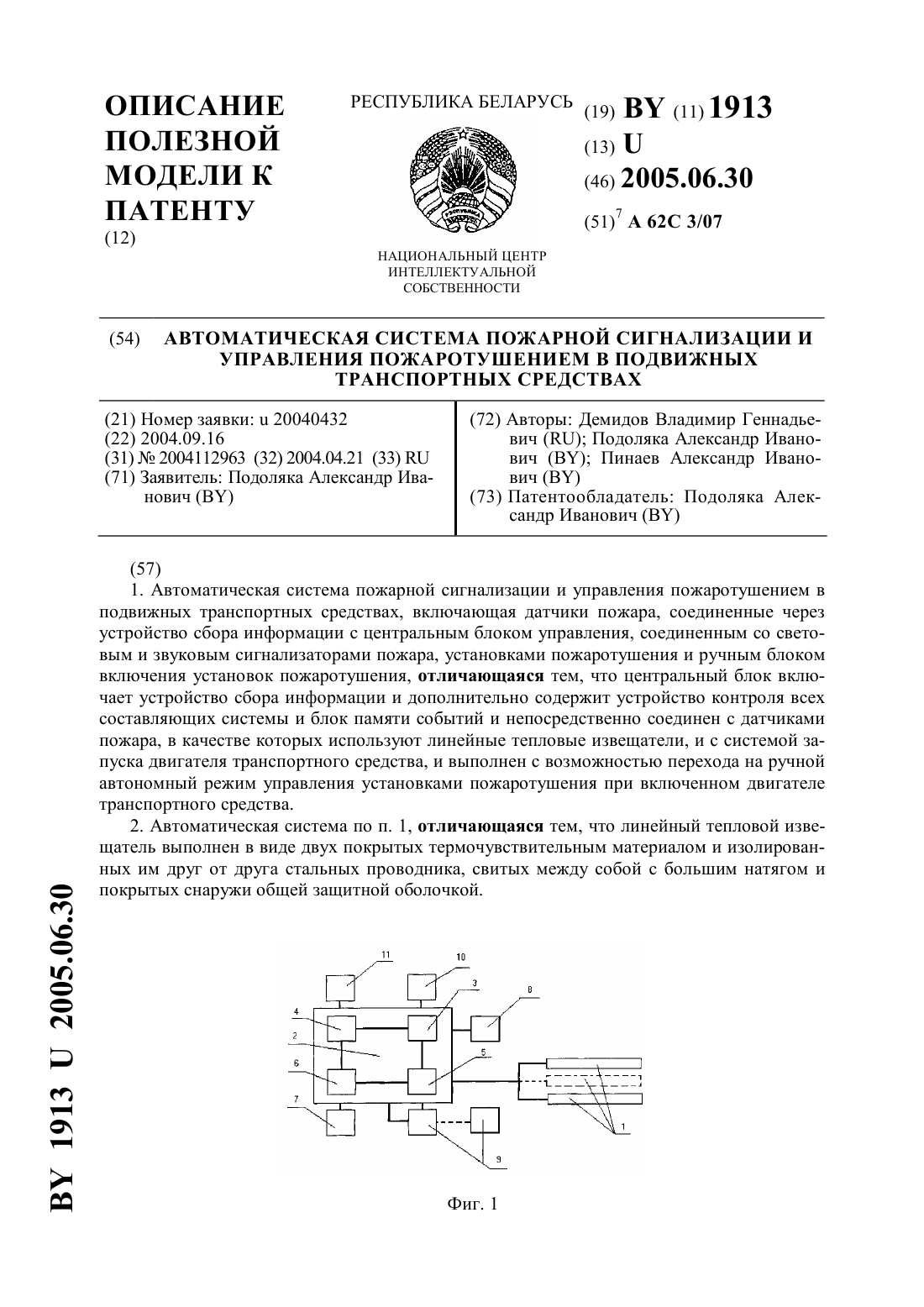
Номер патента: U 1913
Опубликовано: 30.06.2005
Авторы: Подоляка Александр Иванович, Пинаев Александр Иванович, Демидов Владимир Геннадьевич
МПК: A62C 3/07
Метки: автоматическая, система, управления, средствах, пожаротушением, пожарной, транспортных, подвижных, сигнализации
Текст:
...с повышенной вероятностью обнаружения пожара, повышенной надежностью и обеспечивающей безопасность людей, находящихся в транспортном средстве. Задача достигается тем, что в известной системе пожарной сигнализации и управления пожаротушением в подвижных транспортных средствах, включающей датчики пожара,соединенные через устройство сбора информации с центральным блоком управления, соединенным со звуковым и световым сигнализаторами пожара,...
Предыдущий патент: Профиль защитный конденсатора холодильника
Следующий патент: Устройство для прогноза землетрясения
Случайный патент: Устройство для определения параметров высокоскоростного потока частиц