Устройство позиционирования ротора вентильного электродвигателя
Номер патента: 4776
Опубликовано: 30.12.2002
Авторы: Ярмолович Вячеслав Алексеевич, Марченко Владимир Алексеевич, Прокошин Валерий Иванович, Драпезо Александр Петрович, Тарасов Альберт Николаевич, Потапов Александр Львович
Текст
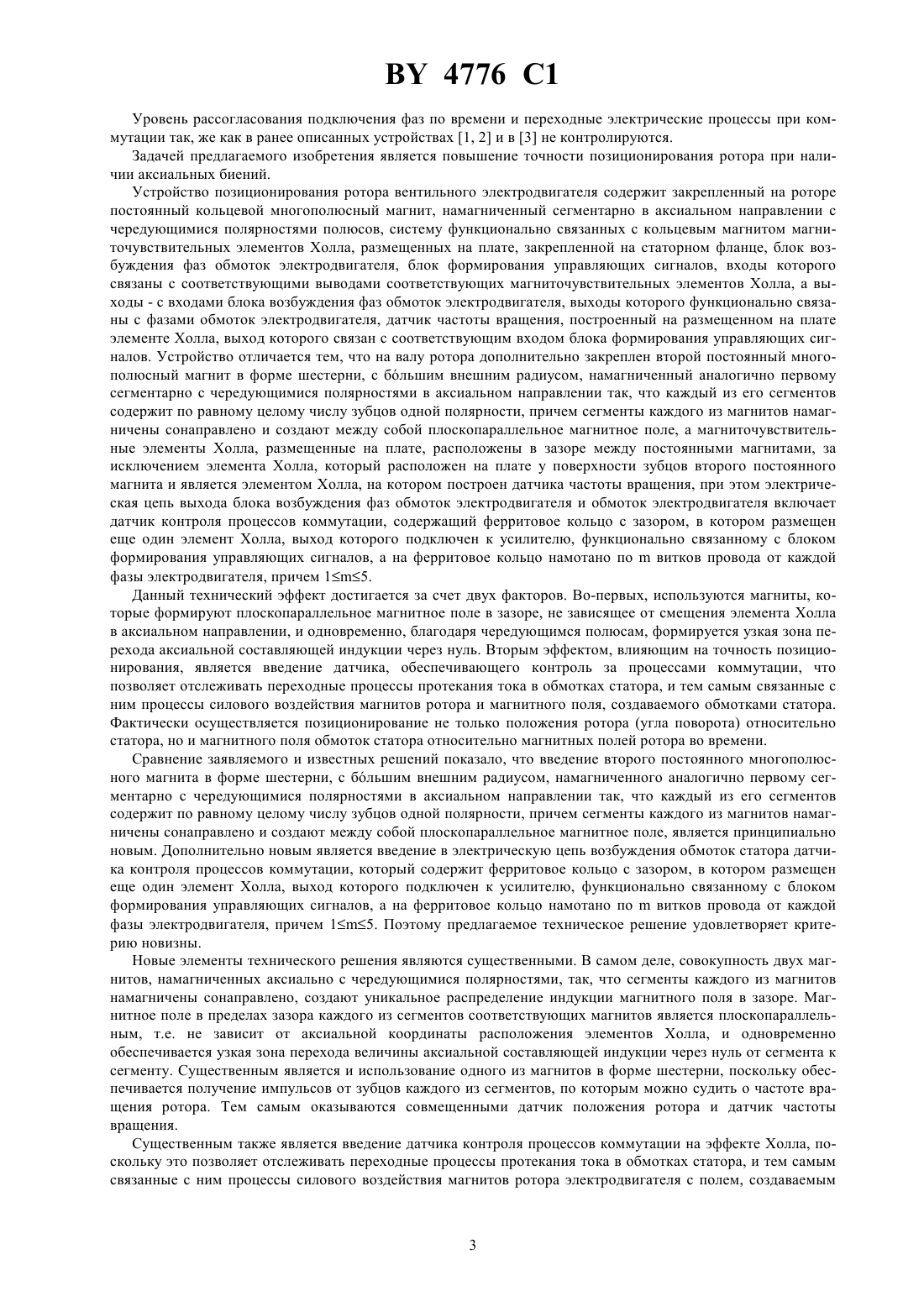
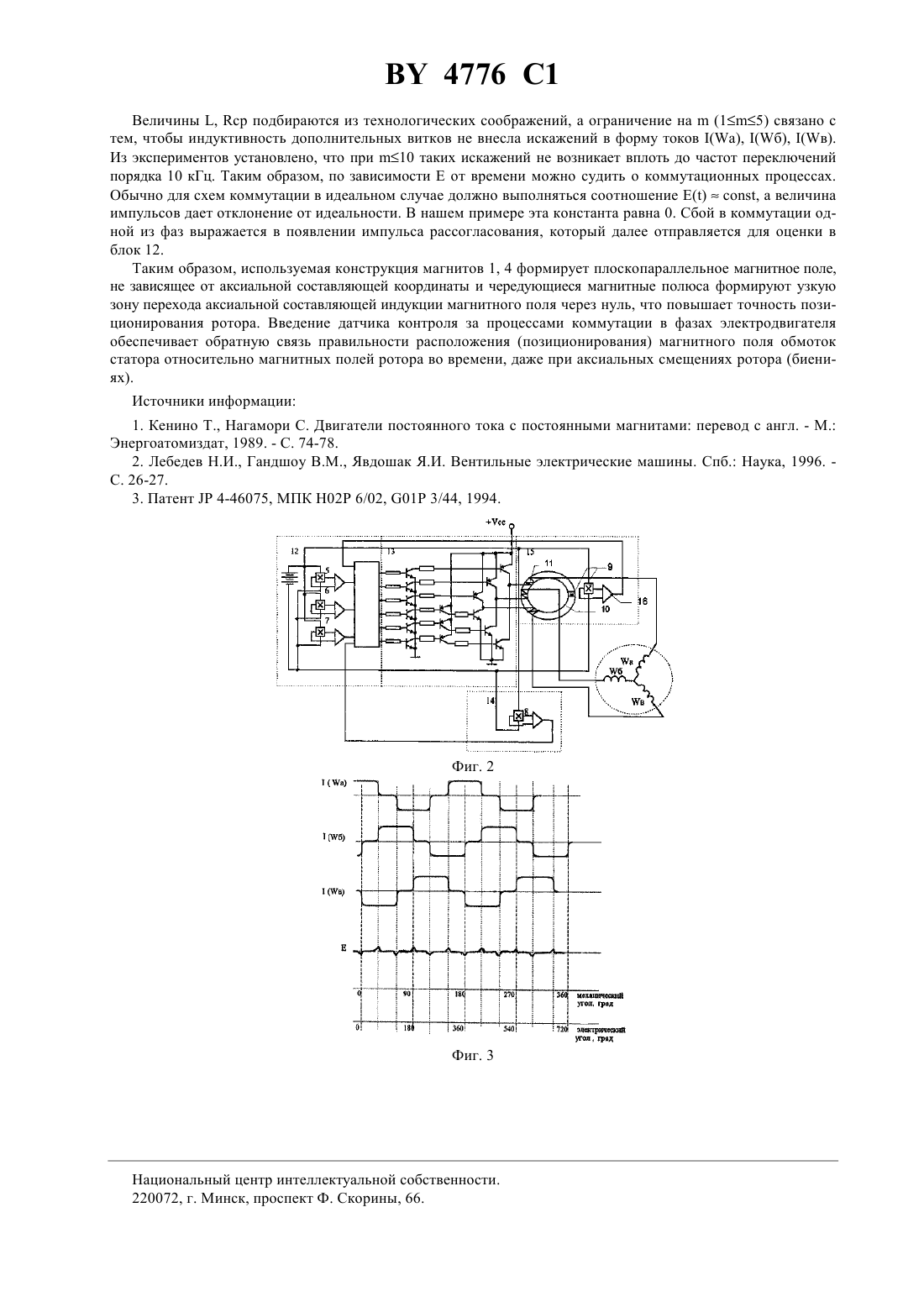
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ РОТОРА ВЕНТИЛЬНОГО ЭЛЕКТРОДВИГАТЕЛЯ(71) Заявитель Институт физики твердого тела и полупроводников НАН Беларуси(73) Патентообладатель Институт физики тврдого тела и полупроводников(57) Устройство позиционирования ротора вентильного электродвигателя, содержащее закрепленный на роторе постоянный кольцевой многополюсный магнит, намагниченный сегментарно в аксиальном направлении с чередующимися полярностями полюсов, систему функционально связанных с кольцевым магнитом магниточувствительных элементов Холла, размещенных на плате, закрепленной на статорном фланце, блок возбуждения фаз обмоток электродвигателя, блок формирования управляющих сигналов, входы которого связаны с соответствующими выводами соответствующих магниточувствительных элементов Холла, а выходы - со входами блока возбуждения фаз обмоток электродвигателя, выходы которого функционально связаны с фазами обмоток электродвигателя, датчик частоты вращения, построенный на размещенном на плате элементе Холла, выход которого связан с соответствующим входом блока формирования управляющих сигналов, отличающееся тем, что на валу ротора дополнительно закреплен второй постоянный многополюсный магнит в форме шестерни с бльшим внешним радиусом, намагниченный аналогично первому сегментарно с чередующимися полярностями в аксиальном направлении так, что каждый из его сегментов содержит по равному целому числу зубцов одной полярности, причем сегменты каждого из магнитов намагничены сонаправлено и создают между собой плоскопараллельное магнитное поле, а магниточувствительные элементы Холла,размещенные на плате, расположены в зазоре между постоянными магнитами, за исключением элемента Холла, который расположен на плате у поверхности зубцов второго постоянного магнита и является элементом Холла, на котором построен датчик частоты вращения, при этом электрическая цепь выхода блока возбуждения фаз обмоток электродвигателя и обмоток электродвигателя включает датчик контроля процессов коммутации, содержащий ферритовое кольцо с зазором, в котором размещен еще один элемент Холла, выход которого подключен к усилителю, функционально связанному с блоком формирования управляющих сигналов, а на ферритовое кольцо намотано повитков провода от каждой фазы электродвигателя, причем 15. 4776 101069250 , 1989.5155419 , 1992.4642496 , 1987.57049386 , 1982.3684921 1, 1992. Предлагаемое изобретение относится к управляемым вентильным электродвигателям. Известно устройство управления вентильным электродвигателем 1, содержащее датчик положения ротора, состоящий из постоянного магнита, намагниченного аксиально с чередующимися полярностями, - исистемы магниточувствительных элементов Холла, размещенных по окружности на плате, закрепленной на статоре блок формирования управляющих импульсов, входы которого функционально связаны с элементами Холла, а выходы - с блоком возбуждения обмоток электродвигателя, и оптический датчик частоты вращения. В данном устройстве датчик положения ротора (ДПР) не обеспечивает достаточной точности позиционирования при наличии аксиальных биений ротора, которые возможны при длительной эксплуатации электродвигателя. Снижение точности обусловлено изменением магнитной индукции при изменении расстояния(зазора) между магниточувствительным элементом и полюсом магнита, находящимся непосредственно над ним. При этом порог срабатывания магниточувствительной схемы (переход от логической единицы к логическому нулю или наоборот) оказывается зависящим от величины индукции магнитного поля, которая определяется не только положением ротора (углом), но и величиной зазора. Кроме того, нет обратной связи, обеспечивающей контроль над процессами коммутации фаз электродвигателей. Наличие индуктивностей обмоток вызывает переходные процессы, оказывающие влияние на эффективность работы электродвигателя в целом. В схеме управления только предусматривается преобразование трех последовательностей прямоугольных импульсов с ДПР длительностью по 180 электрических градусов в шесть последовательностей импульсов длительностью по 120 электрических градусов и распространение их по ключам инвертора. Известно применение в качестве датчика положения ротора кольцевого магнита, намагниченного аксиально с примыкающими к его торцевым поверхностям магнитопроводом с секторными зубцами, между которыми неподвижно расположены пороговые магниточувствительные элементы Холла 2. При вращении якоря ДПР каждый из чувствительных элементов поочередно находится либо в аксиальном поле между зубцами,либо в зоне отсутствия зубцов, т.е. в поле рассеяния кольцевого магнита. Так как поле между зубцами почти строго плоскопараллельное, то смещение ротора в аксиальном направлении не влияет на выходной сигнал элементов Холла. Однако данный датчик не обладает достаточной точностью при определении положения ротора в зоне перехода от наличия магнитного поля между зубцами к полю рассеяния магнита (величине ниже порога срабатывания). Эта зона изменения величины магнитной индукции является плавной и достаточно широкой, в связи с этим и возникает неопределенный интервал срабатывания порогового устройства на элементе Холла. При использовании в качестве источника магнитного поля полюсов с чередующейся полярностью, как использовалось в 1, эта зона перехода может быть значительно уменьшена и доведена до 100 мкм, что невозможно в 2. Тем самым в 2 улучшение одного параметра (нечувствительность к аксиальным биениям) приводит к ухудшению второго (точность позиционирования по углу). Анализ тенденций использования источников магнитного поля в ДПР приводит к выводу о перспективности использования магнитов именно с чередующимися полюсами - и -. Наиболее близким по технической сущности исполнения к предлагаемому является устройство привода во вращение 3 (прототип). В нем дополнительно совмещены ДПР и датчик частоты вращения ротора при использовании одной магнитной системы с чередующимися полюсами магнитов. Устройство содержит намагниченный участок для измерения частоты вращения ротора, состоящий из магнитных полюсов - и -,расположенных с первым шагом, и намагниченный участок для измерения фазы (угла поворота), состоящий из чередующихся магнитных полюсов, расположенных со вторым шагом, отличным от первого. Магниты намагничены в аксиальном направлении. Система магниточувствительных элементов воспринимает сигналы по определению положения ротора от полюсов, имеющих один шаг расположения, а частоту вращения определяют по сигналам от полюсов с другим шагом расположения чередующихся полюсов. При этом управление частотой и фазой поворота осуществляется в блоках формирования сигналов управления и возбуждения обмоток электродвигателя. Следует отметить, что в 3 смещение ротора в аксиальном направлении (биения) также влияет на точность коммутации фаз электродвигателя, в основном из-за изменений сигнала от магниточувствительного элемента управления фазой двигателя. При этом наиболее сильно изменяются сигналы из-за магнитов, расположенных диаметрально противоположно. Чувствительные элементы контроля над частотой вращения,выполненные в виде печатных катушек, вследствие суммирования сигнала по всему контуру в меньшей степени испытывает влияние процессов биения в аксиальном направлении. 4776 1 Уровень рассогласования подключения фаз по времени и переходные электрические процессы при коммутации так, же как в ранее описанных устройствах 1, 2 и в 3 не контролируются. Задачей предлагаемого изобретения является повышение точности позиционирования ротора при наличии аксиальных биений. Устройство позиционирования ротора вентильного электродвигателя содержит закрепленный на роторе постоянный кольцевой многополюсный магнит, намагниченный сегментарно в аксиальном направлении с чередующимися полярностями полюсов, систему функционально связанных с кольцевым магнитом магниточувствительных элементов Холла, размещенных на плате, закрепленной на статорном фланце, блок возбуждения фаз обмоток электродвигателя, блок формирования управляющих сигналов, входы которого связаны с соответствующими выводами соответствующих магниточувствительных элементов Холла, а выходы - с входами блока возбуждения фаз обмоток электродвигателя, выходы которого функционально связаны с фазами обмоток электродвигателя, датчик частоты вращения, построенный на размещенном на плате элементе Холла, выход которого связан с соответствующим входом блока формирования управляющих сигналов. Устройство отличается тем, что на валу ротора дополнительно закреплен второй постоянный многополюсный магнит в форме шестерни, с бльшим внешним радиусом, намагниченный аналогично первому сегментарно с чередующимися полярностями в аксиальном направлении так, что каждый из его сегментов содержит по равному целому числу зубцов одной полярности, причем сегменты каждого из магнитов намагничены сонаправлено и создают между собой плоскопараллельное магнитное поле, а магниточувствительные элементы Холла, размещенные на плате, расположены в зазоре между постоянными магнитами, за исключением элемента Холла, который расположен на плате у поверхности зубцов второго постоянного магнита и является элементом Холла, на котором построен датчика частоты вращения, при этом электрическая цепь выхода блока возбуждения фаз обмоток электродвигателя и обмоток электродвигателя включает датчик контроля процессов коммутации, содержащий ферритовое кольцо с зазором, в котором размещен еще один элемент Холла, выход которого подключен к усилителю, функционально связанному с блоком формирования управляющих сигналов, а на ферритовое кольцо намотано повитков провода от каждой фазы электродвигателя, причем 15. Данный технический эффект достигается за счет двух факторов. Во-первых, используются магниты, которые формируют плоскопараллельное магнитное поле в зазоре, не зависящее от смещения элемента Холла в аксиальном направлении, и одновременно, благодаря чередующимся полюсам, формируется узкая зона перехода аксиальной составляющей индукции через нуль. Вторым эффектом, влияющим на точность позиционирования, является введение датчика, обеспечивающего контроль за процессами коммутации, что позволяет отслеживать переходные процессы протекания тока в обмотках статора, и тем самым связанные с ним процессы силового воздействия магнитов ротора и магнитного поля, создаваемого обмотками статора. Фактически осуществляется позиционирование не только положения ротора (угла поворота) относительно статора, но и магнитного поля обмоток статора относительно магнитных полей ротора во времени. Сравнение заявляемого и известных решений показало, что введение второго постоянного многополюсного магнита в форме шестерни, с бльшим внешним радиусом, намагниченного аналогично первому сегментарно с чередующимися полярностями в аксиальном направлении так, что каждый из его сегментов содержит по равному целому числу зубцов одной полярности, причем сегменты каждого из магнитов намагничены сонаправлено и создают между собой плоскопараллельное магнитное поле, является принципиально новым. Дополнительно новым является введение в электрическую цепь возбуждения обмоток статора датчика контроля процессов коммутации, который содержит ферритовое кольцо с зазором, в котором размещен еще один элемент Холла, выход которого подключен к усилителю, функционально связанному с блоком формирования управляющих сигналов, а на ферритовое кольцо намотано повитков провода от каждой фазы электродвигателя, причем 15. Поэтому предлагаемое техническое решение удовлетворяет критерию новизны. Новые элементы технического решения являются существенными. В самом деле, совокупность двух магнитов, намагниченных аксиально с чередующимися полярностями, так, что сегменты каждого из магнитов намагничены сонаправлено, создают уникальное распределение индукции магнитного поля в зазоре. Магнитное поле в пределах зазора каждого из сегментов соответствующих магнитов является плоскопараллельным, т.е. не зависит от аксиальной координаты расположения элементов Холла, и одновременно обеспечивается узкая зона перехода величины аксиальной составляющей индукции через нуль от сегмента к сегменту. Существенным является и использование одного из магнитов в форме шестерни, поскольку обеспечивается получение импульсов от зубцов каждого из сегментов, по которым можно судить о частоте вращения ротора. Тем самым оказываются совмещенными датчик положения ротора и датчик частоты вращения. Существенным также является введение датчика контроля процессов коммутации на эффекте Холла, поскольку это позволяет отслеживать переходные процессы протекания тока в обмотках статора, и тем самым связанные с ним процессы силового воздействия магнитов ротора электродвигателя с полем, создаваемым 4776 1 обмотками статора. Все вышеперечисленное и способствует решению задачи по повышению точности позиционирования ротора при наличии биений. Предлагается следующее устройство. На фиг. 1 изображена магнитная система позиционирования ротора с расположением магниточувствительных элементов Холла на плате, на фиг. 2 - электрическая блок-схема устройства для подключения трехфазного четырехполюсного вентильного электродвигателя, на фиг. 3 - диаграмма токов, протекающих в обмотках статора и ЭДС Холла с датчика контроля процессов коммутации от угла поворота ротора. Устройство содержит закрепленный на роторе постоянный кольцевой многополюсный магнит 1, намагниченный сегментарно в аксиальном направлении с чередующимися полярностями полюсов плату 2, закрепленную на статорном фланце с размещенными на ней магниточувствительными и другими радиотехническими элементами 3 постоянный многополюсный магнит 4, закрепленный на валу ротора, выполнен в форме шестерни, намагничен сегментарно в аксиальном направлении, аналогично, как и магнит 1, но имеет бльший радиус, так что каждый из его сегментов содержит по равному целому числу зубцов одной полярности (в данном случае - р зубцов), причем сегменты каждого из магнитов 1 и 4 намагничены сонаправлено и создают между собой плоскопараллельное магнитное поле. В зазоре между магнитами на плате 2 размещены по окружности магниточувствительные элементы Холла 5, 6 и 7 с центральным углом 60 между ними(иногда 30, в зависимости от схемы коммутации). Один элемент Холла 8, на котором построен датчик частоты вращения, расположен на плате 2 у поверхности зубцов магнита 4. Элемент Холла 9 размещен в зазоре ферритового кольца 10, на котором находятся витки 11. Элементы Холла 5-8 размещены на плате 2, которая крепится на статорном фланце. Устройство содержит блок формирования управляющих сигналов 12,входы которого связаны с соответствующими выводами соответствующих магниточувствительных элементов Холла, а выходы - с входами блока возбуждения фаз обмоток электродвигателя блок возбуждения фаз обмоток электродвигателя 13 датчик частоты вращения 14, построенный на элементе Холла 8 датчик контроля процессов коммутации 15. Датчик 15 построен на элементе Холла 9, который размещен в зазоре ферритового кольца 10, причем на кольцо 10 намотано ровно повитков (где 15) провода 11 от каждой из фаз электродвигателя , б, в соответственно. Сигнал с выхода элемента Холла 9 после усиления дифференциальным усилителем 16 подается на блок формирования управляющих сигналов 12. Устройство работает следующим образом на примере четырехполюсного вентильного электродвигателя постоянного тока трехфазного типа с двухполупериодным управлением. При вращении магнитов 1 и 4, закрепленных на валу ротора, с выхода элемента Холла 8 снимается ЭДС в виде пакета импульсов различной полярности. Число импульсов в каждом пакете соответствует числу зубцов в каждом сегменте. Число импульсов в единицу времени дает информацию о частоте вращения ротора, которая поступает в блок формирования управляющих сигналов 12. От элементов Холла 5-7, смещенных относительно друг друга на 60, поступают сигналы на вход микросхемы блока 12 в форме трех последовательностей прямоугольных импульсов длительностью 180 электрических градусов и смещенных друг относительно друга на 180 электрических градусов, которые преобразуются в шесть последовательностей импульсов длительностью по 120 электрических градусов и смещенных на 240 электрических градусов,и распространяются по ключам инвертора (для четырехполюсного двигателя угол в 60 соответствует электрическому углу в 120). Блок 13 выдает сигнал возбуждения обмоток электродвигателя в соответствии с положением ротора электродвигателя. Диаграммы токов, протекающих в обмотках статора, , (б), (в) приведены на фиг. 3. При таком двухполупериодном типе управления трехфазным двигателем обеспечивается максимально высокий КПД. Импульсы токов , (б), (в) не имеют идеально прямоугольной формы из-за наличия индуктивностей фаз и конечного времени переключения транзисторных ключей. Длительности импульсов также имеют некоторые колебания, что обусловлено разбалансом формирования управляющих сигналов из-за геометрической асимметрии полюсов магнита и расположения магниточувствительных элементов, даже при очень тщательной сборке ДПР. Поэтому появление переходных процессов при коммутации является неизбежным явлением. Необходимость контроля процессов коммутации и вызывает введение датчика 15, гальванически развязанного с фазами электродвигателя. Поскольку на ферритовое кольцо намотано повитков провода от каждой фазы электродвигателя (15), то в любой момент времени магнитный поток Ф в ферритовом сердечнике пропорционален сумме магнитных потоков, наводимых каждым из токов фазы, т.е. Ф(б)(в),причем величина тока берется со своим знаком в зависимости от направления протекания. Величина ЭДС измеряется элементом Холла 9. Она пропорциональна величине магнитной индукции в зазоре феррита, т.е. Е(б)(в),где- один из коэффициентов пропорциональности, который зависит от магнитной проницаемости феррита,его размеров и величины зазора. При использовании ферритов с высокой магнитной проницаемостью/2,где- величина зазора, в котором располагается элемент Холла 9 с - средний радиус ферритового кольца. 4 4776 1 Величины , с подбираются из технологических соображений, а ограничение на(15) связано с тем, чтобы индуктивность дополнительных витков не внесла искажений в форму токов , (б), (в). Из экспериментов установлено, что при 10 таких искажений не возникает вплоть до частот переключений порядка 10 кГц. Таким образом, по зависимости Е от времени можно судить о коммутационных процессах. Обычно для схем коммутации в идеальном случае должно выполняться соотношение, а величина импульсов дает отклонение от идеальности. В нашем примере эта константа равна 0. Сбой в коммутации одной из фаз выражается в появлении импульса рассогласования, который далее отправляется для оценки в блок 12. Таким образом, используемая конструкция магнитов 1, 4 формирует плоскопараллельное магнитное поле,не зависящее от аксиальной составляющей координаты и чередующиеся магнитные полюса формируют узкую зону перехода аксиальной составляющей индукции магнитного поля через нуль, что повышает точность позиционирования ротора. Введение датчика контроля за процессами коммутации в фазах электродвигателя обеспечивает обратную связь правильности расположения (позиционирования) магнитного поля обмоток статора относительно магнитных полей ротора во времени, даже при аксиальных смещениях ротора (биениях). Источники информации 1. Кенино Т., Нагамори С. Двигатели постоянного тока с постоянными магнитами перевод с англ. - М. Энергоатомиздат, 1989. - С. 74-78. 2. Лебедев Н.И., Гандшоу В.М., Явдошак Я.И. Вентильные электрические машины. Спб. Наука, 1996. С. 26-27. 3. Патент 4-46075, МПК Н 02 Р 6/02, 01 3/44, 1994. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66. 5
МПК / Метки
МПК: H02P 6/00, H02K 29/08
Метки: устройство, позиционирования, электродвигателя, ротора, вентильного
Код ссылки
<a href="https://by.patents.su/5-4776-ustrojjstvo-pozicionirovaniya-rotora-ventilnogo-elektrodvigatelya.html" rel="bookmark" title="База патентов Беларуси">Устройство позиционирования ротора вентильного электродвигателя</a>
Прецизионный датчик положения ротора для управляемых вентильных электродвигателей
Номер патента: 4567
Опубликовано: 30.09.2002
Авторы: Потапов Александр Львович, Драпезо Александр Петрович, Ярмолович Вячеслав Алексеевич, Прокошин Валерий Иванович, Тарасов Альберт Николаевич, Марченко Владимир Алексеевич
МПК: H02K 29/08
Метки: электродвигателей, управляемых, датчик, положения, ротора, вентильных, прецизионный
Текст:
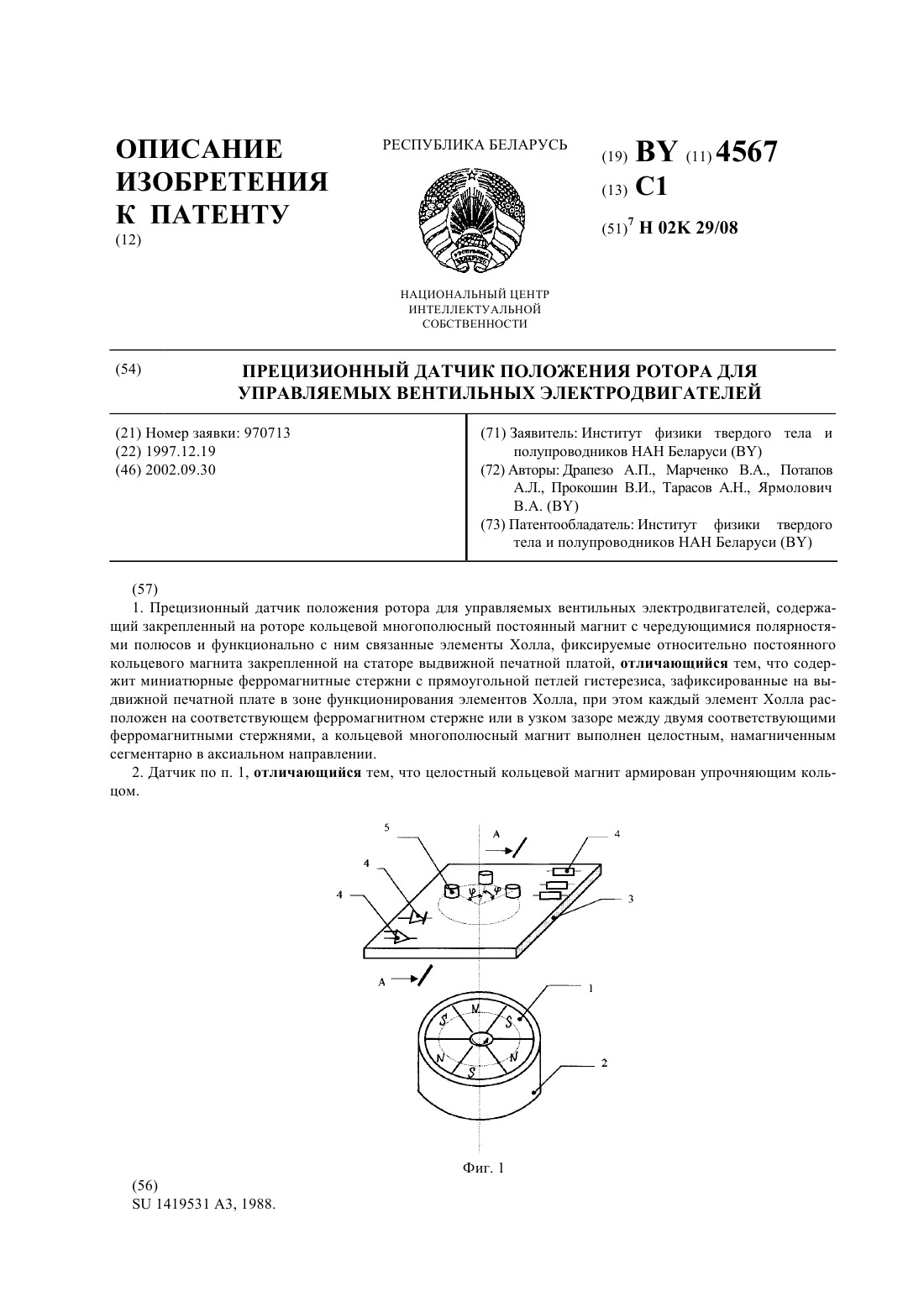
...введение миниатюрных ферромагнитных стержней с ППГ в зону функционирования элемента Холла обеспечивает повышение крутизны выходной характеристики ДПР, обеспечивает формирование узкой зоны перехода величины индукции магнитного поля через нуль при перемещении секторов магнита от - к - или наоборот, что и приводит к повышению точности позиционирования ротора. Сопутствующим положительным дополнительным эффектом является увеличение прочностных...
Устройство для ремонта опорной шейки ротора турбины или турбоэлектрогенератора
Номер патента: 4829
Опубликовано: 30.12.2002
Авторы: Павлюков Евгений Сергеевич, Рукавичников Геннадий Аркадьевич
МПК: B24B 5/04, H02K 15/00
Метки: шейки, устройство, ротора, ремонта, опорной, или, турбины, турбоэлектрогенератора
Текст:
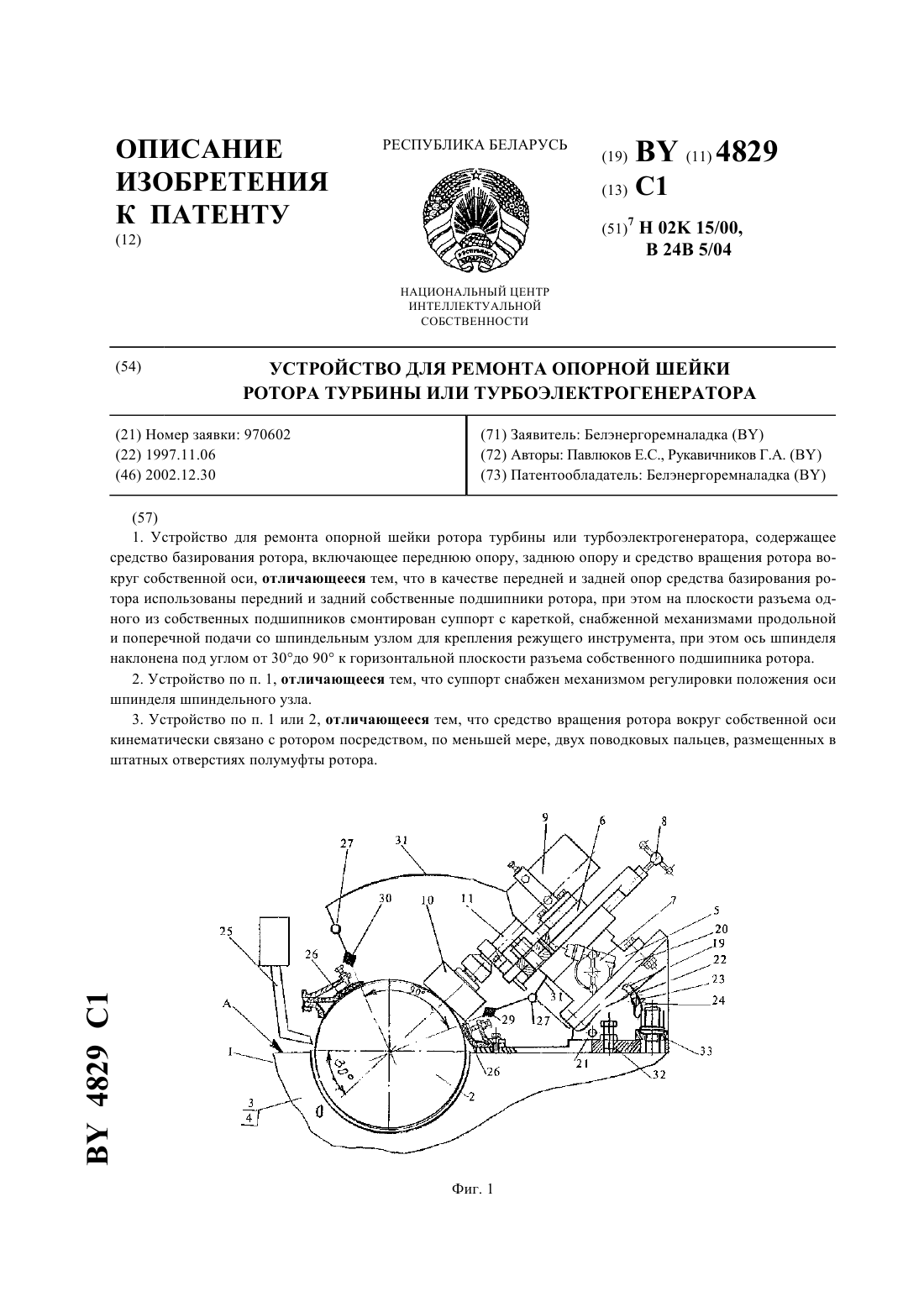
...22 с фиксатором 23 и угловой шкалой 24. Угол наклона 30-90 суппорта 5 с кареткой 6 выбирают исходя из условий резания и условия движения инструмента при поперечной подаче в направлении плоскости проходящей через ось М- центров ротора 2. В устройстве на плоскости А разъема одного из собственных подшипников 3 ротора 2 оппозитно суппорта 5 размещено средство для смазки 25 обрабатываемой шейки ротора 2. В зоне крепления суппорта 5 и средства для...
Способ регулирования частоты вращения электродвигателя постоянного тока с вентильным преобразователем
Номер патента: 4700
Опубликовано: 30.09.2002
Авторы: Леневский Геннадий Сергеевич, Шарков Василий Николаевич, Бочкарев Геннадий Владимирович
МПК: H02P 5/16
Метки: способ, постоянного, преобразователем, вращения, вентильным, регулирования, электродвигателя, частоты, тока
Текст:
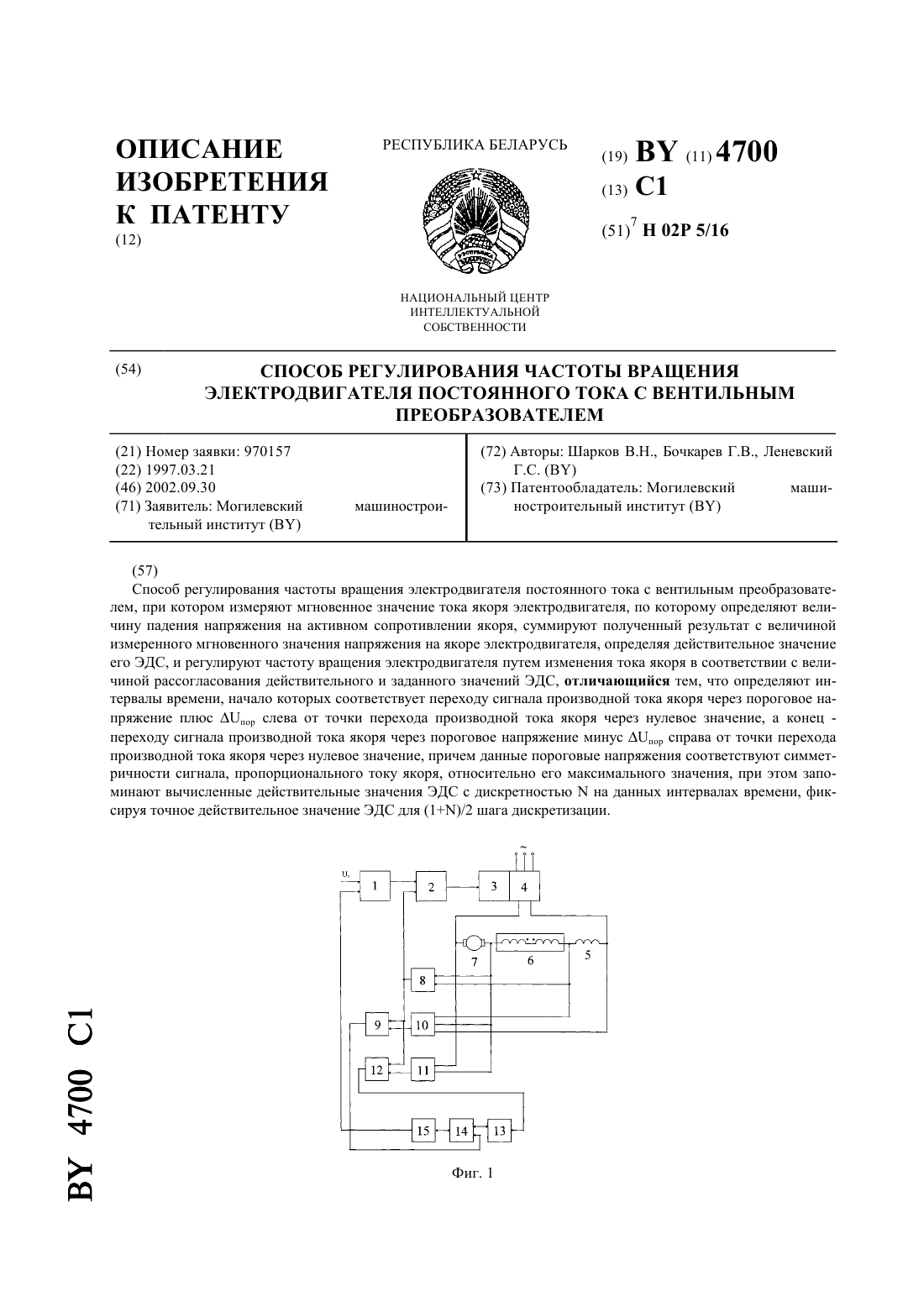
...которого соединен с установочным входом регулятора 2 тока, а выход последнего подключен к входу блока 3 импульсно-фазового управления, соединенного с вентильным преобразователем 4. К выходу вентильного преобразователя 4 подключены последовательно соединенные воздушная катушка индуктивности 5, токовый шунт 6, выполненный в виде воздушного соленоида (индуктивной катушки) со встречно включенными обмотками, и управляемый устройством...
Механизм позиционирования
Номер патента: 422
Опубликовано: 30.03.1995
Авторы: Евсеев А. М., Палий О. И., Терехов А. В., Мовчан В. И., Россол А. И., Кенько В. М.
МПК: B23Q 16/02
Метки: позиционирования, механизм
Текст:
...осей каждого последующего после первого относительно оси первого отверстия. После доворота планшайба 4 фиксируется тормозом на чертеже не показан). если это требуется или самим фиксатором. если нагрузка на планшайбу незначительная.Например (си. фиг. 2 если 2 360. Аг 1.30. р 30 т.е. требуется обеспечить минимальный поворот планшайбы в 30. имея комплекс фиксаторов в 30 шт. со смещением зубьев относительно оси фиксатора в 0. 1. 2. 31.29. то...
Скважинная часть устройства для контроля температуры погружного электродвигателя и давления на приеме насоса
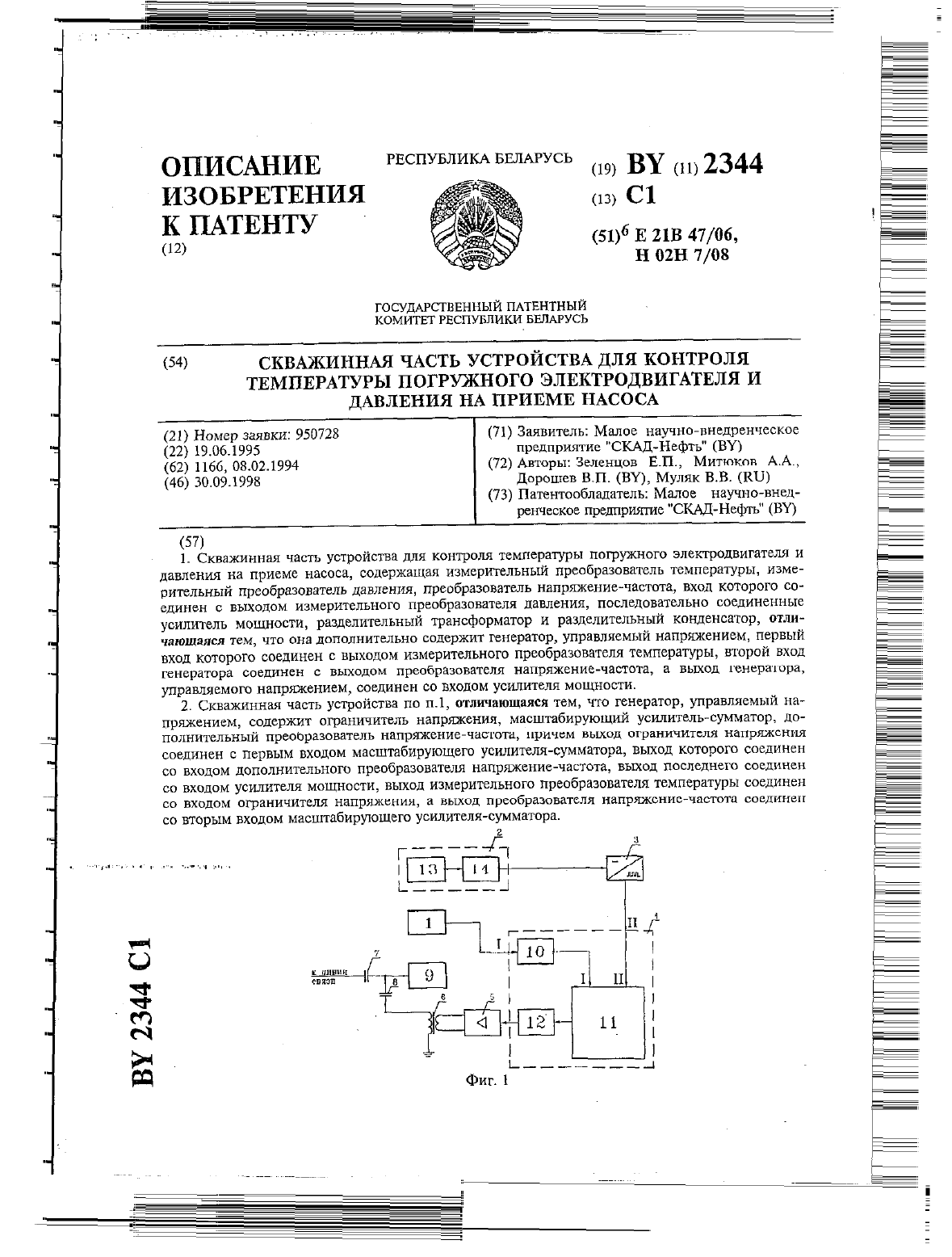
Номер патента: 2344
Опубликовано: 30.09.1998
Авторы: Муляк Владимир Витальевич, Зеленцов Евгений Петрович, Дорошев Валерий Павлович, Митюков Андрей Алексеевич
МПК: H02H 7/08, E21B 47/06
Метки: погружного, часть, электродвигателя, контроля, устройства, температуры, скважинная, давления, приеме, насоса
Текст:
...Благодаря полной гальванической развязке устройства от цепей питания и линии связи, достигаемой благодаря разделительным трансформатору и конденсатору, исключается влияние помех на формирование и подачу в линию связи результирующего информационного сигнала.Высокочастотные составляющие помех воздействуют одновременно на части результирующего информационного сигнала, относящиеся к давлению и температуре, что позволяет индентифицировать помехи и...
Предыдущий патент: Способ восстановления шеек коленчатых валов ДВС
Следующий патент: Способ лечения профессиональных аллергозов и дерматозов
Случайный патент: Способ фотодеструкции карбоксигемоглобина крови in vitro