Электрогидравлическая система позиционного регулирования навесного устройства мобильной машины
Номер патента: 11118
Опубликовано: 30.10.2008
Авторы: Бельчик Леонид Демьянович, Строк Дмитрий Евгеньевич, Строк Евгений Яковлевич, Грозный Владимир Алексеевич, Клюев Александр Илларионович
Текст
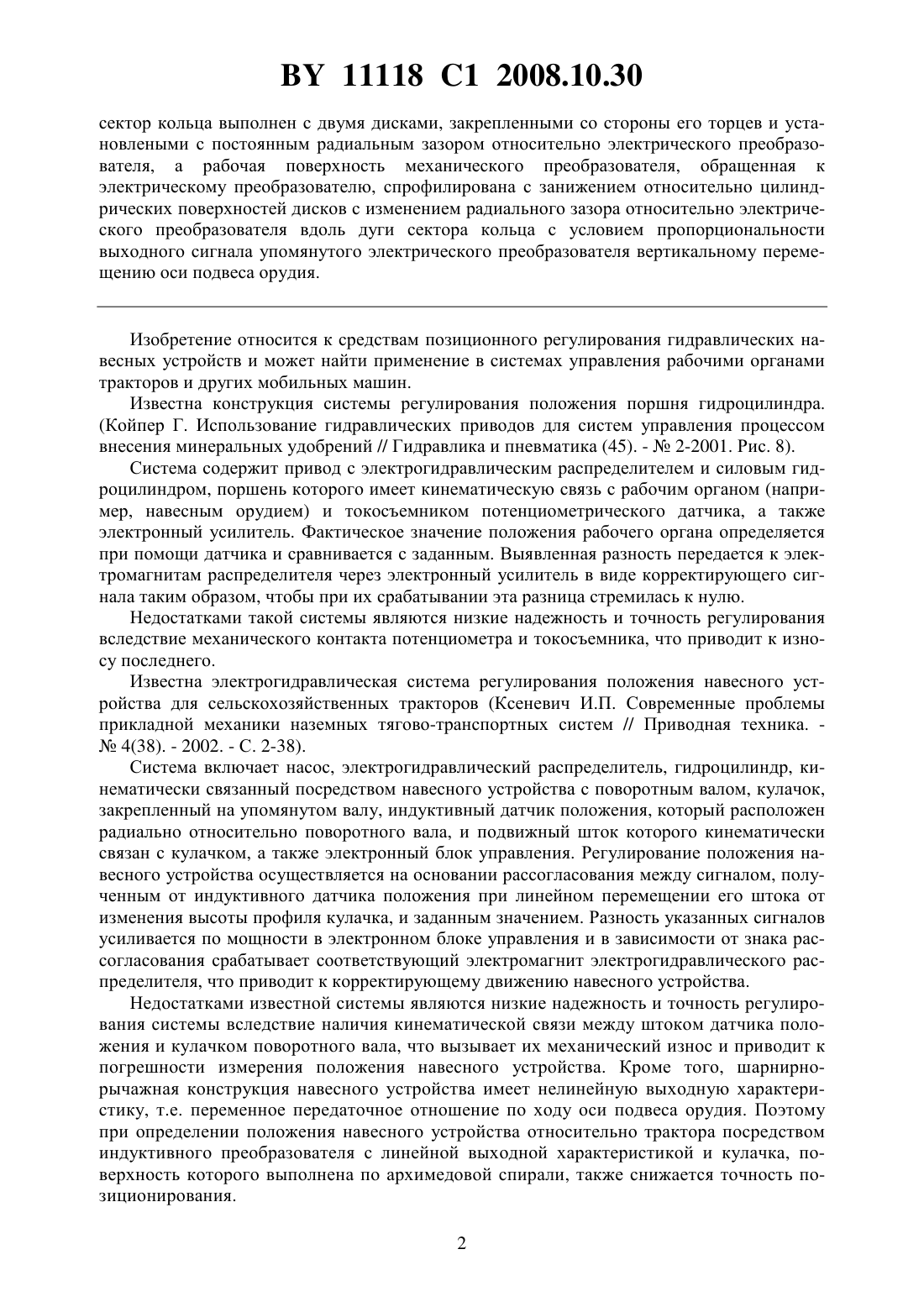
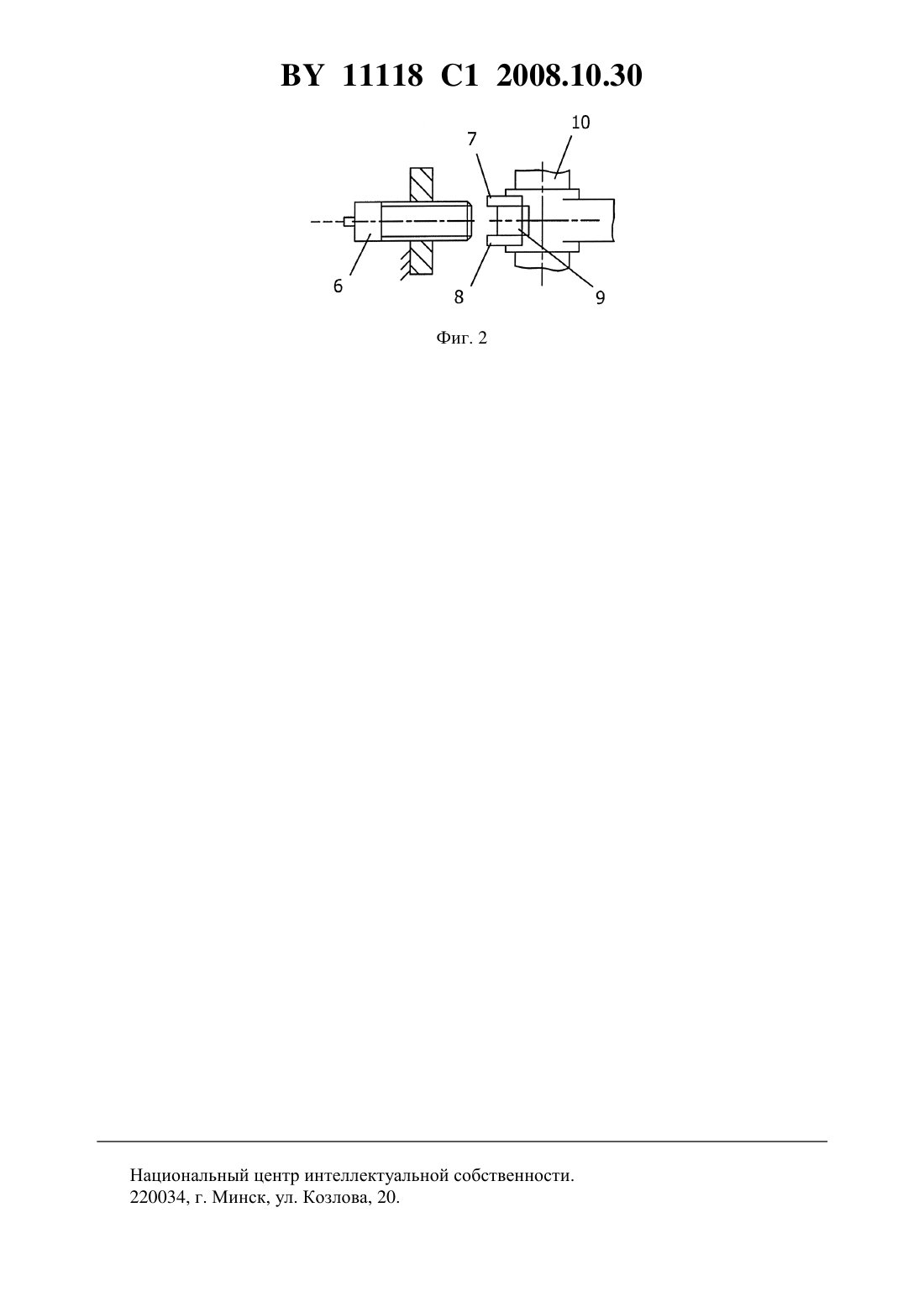
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ НАВЕСНОГО УСТРОЙСТВА МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Строк Евгений Яковлевич Бельчик Леонид Демьянович Строк Дмитрий Евгеньевич Клюев Александр Илларионович Грозный Владимир Алексеевич(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Электрогидравлическая система позиционного регулирования навесного устройства мобильной машины, содержащая гидравлический привод оси подвеса орудия, сравнивающее устройство, механический и электрический преобразователи углового перемещения поворотного вала, расположенные с радиальным зазором, причем сравнивающее устройство электрически соединено с электрическим преобразователем и гидравлическим приводом, механический преобразователь неподвижно охватывает поворотный вал и выполнен в виде сектора кольца из электропроводного материала, отличающаяся тем, что 11118 1 2008.10.30 сектор кольца выполнен с двумя дисками, закрепленными со стороны его торцев и установлеными с постоянным радиальным зазором относительно электрического преобразователя, а рабочая поверхность механического преобразователя, обращенная к электрическому преобразователю, спрофилирована с занижением относительно цилиндрических поверхностей дисков с изменением радиального зазора относительно электрического преобразователя вдоль дуги сектора кольца с условием пропорциональности выходного сигнала упомянутого электрического преобразователя вертикальному перемещению оси подвеса орудия. Изобретение относится к средствам позиционного регулирования гидравлических навесных устройств и может найти применение в системах управления рабочими органами тракторов и других мобильных машин. Известна конструкция системы регулирования положения поршня гидроцилиндра.(Койпер Г. Использование гидравлических приводов для систем управления процессом внесения минеральных удобрений // Гидравлика и пневматика (45). -2-2001. Рис. 8). Система содержит привод с электрогидравлическим распределителем и силовым гидроцилиндром, поршень которого имеет кинематическую связь с рабочим органом (например, навесным орудием) и токосъемником потенциометрического датчика, а также электронный усилитель. Фактическое значение положения рабочего органа определяется при помощи датчика и сравнивается с заданным. Выявленная разность передается к электромагнитам распределителя через электронный усилитель в виде корректирующего сигнала таким образом, чтобы при их срабатывании эта разница стремилась к нулю. Недостатками такой системы являются низкие надежность и точность регулирования вследствие механического контакта потенциометра и токосъемника, что приводит к износу последнего. Известна электрогидравлическая система регулирования положения навесного устройства для сельскохозяйственных тракторов (Ксеневич И.П. Современные проблемы прикладной механики наземных тягово-транспортных систем // Приводная техника.4(38). - 2002. - С. 2-38). Система включает насос, электрогидравлический распределитель, гидроцилиндр, кинематически связанный посредством навесного устройства с поворотным валом, кулачок,закрепленный на упомянутом валу, индуктивный датчик положения, который расположен радиально относительно поворотного вала, и подвижный шток которого кинематически связан с кулачком, а также электронный блок управления. Регулирование положения навесного устройства осуществляется на основании рассогласования между сигналом, полученным от индуктивного датчика положения при линейном перемещении его штока от изменения высоты профиля кулачка, и заданным значением. Разность указанных сигналов усиливается по мощности в электронном блоке управления и в зависимости от знака рассогласования срабатывает соответствующий электромагнит электрогидравлического распределителя, что приводит к корректирующему движению навесного устройства. Недостатками известной системы являются низкие надежность и точность регулирования системы вследствие наличия кинематической связи между штоком датчика положения и кулачком поворотного вала, что вызывает их механический износ и приводит к погрешности измерения положения навесного устройства. Кроме того, шарнирнорычажная конструкция навесного устройства имеет нелинейную выходную характеристику, т.е. переменное передаточное отношение по ходу оси подвеса орудия. Поэтому при определении положения навесного устройства относительно трактора посредством индуктивного преобразователя с линейной выходной характеристикой и кулачка, поверхность которого выполнена по архимедовой спирали, также снижается точность позиционирования. 2 11118 1 2008.10.30 По рекламным проспектам фирмы Мита известна электрогидравлическая система позиционного регулирования навесного устройства трактора. (Мита Олеодинамика. Профиль компании и обзор продукции. - Италия Треньяго, 2001 // ). Система содержит электрогидравлический усилитель, сообщенный со сливной и напорной магистралями, гидроцилиндр, кинематически связанный с поворотным валом навесного устройства и орудием посредством механизма навески, механический преобразователь углового перемещения поворотного вала, выполненный в виде кулачка с рабочим профилем переменной высоты, закрепленного на упомянутом валу, электрический преобразователь, установленный радиально с зазором относительно механического преобразователя, а также электронный усилитель. При перемещении навесного орудия происходит изменение величины зазора между механическим и электрическим преобразователями. Полученный сигнал поступает в электронный усилитель, где сравнивается по величине с заданным значением. Усиленный сигнал рассогласования управляет электромагнитами гидравлического усилителя, который осуществляет подачу рабочей жидкости из напорной магистрали в гидроцилиндр или ее выпуск. Недостатком указанной системы является низкая помехозащищенность вследствие реализации небольшого рабочего хода электрического преобразователя из-за его нелинейности при наличии вибрации остова трактора. Наиболее близким аналогом по совокупности существенных признаков с заявляемым изобретением является электрогидравлическая система позиционного регулирования навесного устройства (патент 944 на полезную модель РБ, МПК А 01 В 63/10. - Опубл. 2003). Система содержитэлектрогидравлический усилитель, электрически соединенный с электронным усилителем, а гидравлически - с гидроцилиндром, насосом и гидробаком. Электронный усилитель подключен к электрическому преобразователю, установленному с радиальным зазором относительно механического преобразователя. Последний неподвижно охватывает поворотный вал навесного устройства, которое соединяет шток гидроцилиндра с навесным орудием. Позиционное регулирование навесного орудия осуществляется следующим образом. Сигнал о положении навесного орудия поступает от электрического преобразователя в электронный усилитель, где сравнивается с заданной величиной. В случае их несовпадения на выход электронного усилителя поступает рассогласование, что приводит к срабатыванию электрогидравлического усилителя. В зависимости от знака рассогласования происходит подача рабочей жидкости под давлением насоса в полость гидроцилиндра или ее отвод в гидробак. При постоянном радиальном зазоре между электрическим и механическим преобразователями происходит изменение величины перекрытия сектором переменной ширины механического преобразователя чувствительной части датчика,пропорциональное углу поворота вала, что приводит к корректирующему движению навесного орудия. Недостатком конструкции является наличие ошибки позиционирования вследствие того, что выходная характеристика электрического преобразователя определяется его передаточной функцией и не учитывает кинематические параметры навесного устройства. Это приводит к тому, что величина вертикального перемещения оси подвеса орудия изменяется непропорционально углу поворота вала. Задачей настоящего изобретения является повышение точности позиционного регулирования за счет введения нелинейной коррекции передаточной функции механического преобразователя. Решение указанной задачи реализовано в системе позиционного регулирования навесного устройства мобильной машины, содержащей гидравлический привод оси подвеса орудия, сравнивающее устройство, механический и электрический преобразователи углового перемещения поворотного вала, расположенные с радиальным зазором. При этом сравнивающее устройство электрически соединено с электрическим преобразователем и 3 11118 1 2008.10.30 гидравлическим приводом, механический преобразователь неподвижно охватывает поворотный вал и выполнен в виде сектора кольца из электропроводного материала, причем,согласно изобретению, сектор кольца выполнен с двумя дисками, закрепленными со стороны его торцев и установленными с постоянным радиальным зазором относительно электрического преобразователя, а рабочая поверхность механического преобразователя,обращенная к электрическому преобразователю, спрофилирована с занижением относительно цилиндрических поверхностей дисков с изменением радиального зазора относительно электрического преобразователя вдоль дуги сектора кольца с условием пропорциональности выходного сигнала упомянутого электрического преобразователя вертикальному перемещению оси подвеса орудия. Это обеспечивает точное позиционирование орудия относительно остова трактора в ручном и автоматическом режимах управления независимо от характеристик электрического и механического преобразователей. На фиг. 1 изображен общий вид электрогидравлической системы позиционного регулирования навесного устройства мобильной машины. На фиг. 2 показано взаимное расположение электрического и механического преобразователей. Электрогидравлической система позиционного регулирования навесного устройства мобильной машины содержит электрогидравлический усилитель 1, гидравлически связанный с насосом 2, гидроцилиндром 3 и гидробаком 4, а электрически - со сравнивающим устройством 5. Это устройство подключено к электрическому преобразователю 6,установленному с радиальным зазором относительно двух дисков 7 и 8, закрепленных со стороны торцев механического преобразователя 9, который выполнен в виде сектора кольца и неподвижно охватывает поворотный вал 10. Орудие 11 кинематически соединено со штоком гидроцилиндра 3 и упомянутым поворотным валом 10 посредством оси подвеса 12 и механизма навески 13. Сектор кольца имеет рабочую поверхность, обращенную к электрическому преобразователю 6 и спрофилированную по условию пропорциональности выходного сигнала последнего вертикальному перемещению оси подвеса 12 с занижением относительно цилиндрических поверхностей дисков 7 и 8 с изменением радиального зазора относительно упомянутого электрического преобразователя 6 вдоль дуги указанного сектора кольца. Система позиционного регулирования навесного устройства работает следующим образом. При движении навесного устройства 13 с орудием 11 происходит изменение радиального зазора между чувствительной частью электрического преобразователя 6 и рабочей поверхностью механического преобразователя 9. В результате этого осуществляется измерение положения орудия 11. На сравнивающее устройство 5 от электрического преобразователя 6 поступает сигнал о положении орудия 11, который сопоставляется с заданным. В случае их несовпадения с выхода упомянутого сравнивающего устройства 5 на электромагниты электрогидравлического усилителя 1 поступает управляющий сигнал. В зависимости от знака сигнала рассогласования происходит или подача рабочей жидкости под давлением насоса 2 в полость гидроцилиндра 3, или ее отвод в гидробак 4. При этом корректирующее движение оси подвеса 12 орудия 11 происходит при помощи гидроцилиндра 3 пропорционально величине выходного сигнала электрического преобразователя 6. Кроме повышения точности позиционного регулирования навесного устройства, изобретение позволяет обеспечить надежность системы. При ее работе радиальный зазор между дисками 7 и 8 сектора кольца механического преобразователя 9 и чувствительной частью электрического преобразователя 6 остается постоянным, что исключает возможность поломки последнего рабочей поверхностью, профиль которой выполнен с занижением относительно цилиндрических поверхностей упомянутых дисков, в случае кинематического несоответствия взаимного расположения преобразователей условиям функционирования навесного устройства. 4 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: A01B 63/10, A01B 63/111
Метки: навесного, система, машины, позиционного, электрогидравлическая, устройства, мобильной, регулирования
Код ссылки
<a href="https://by.patents.su/5-11118-elektrogidravlicheskaya-sistema-pozicionnogo-regulirovaniya-navesnogo-ustrojjstva-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Электрогидравлическая система позиционного регулирования навесного устройства мобильной машины</a>
Система позиционного регулирования навесного устройства
Номер патента: U 944
Опубликовано: 30.09.2003
Авторы: Борейшо Владимир Евгеньевич, Бельчик Леонид Демьянович, Горавский Сергей Леонидович, Строк Дмитрий Евгеньевич, Усс Иван Никодимович, Строк Евгений Яковлевич
МПК: A01B 63/10
Метки: позиционного, система, регулирования, устройства, навесного
Текст:
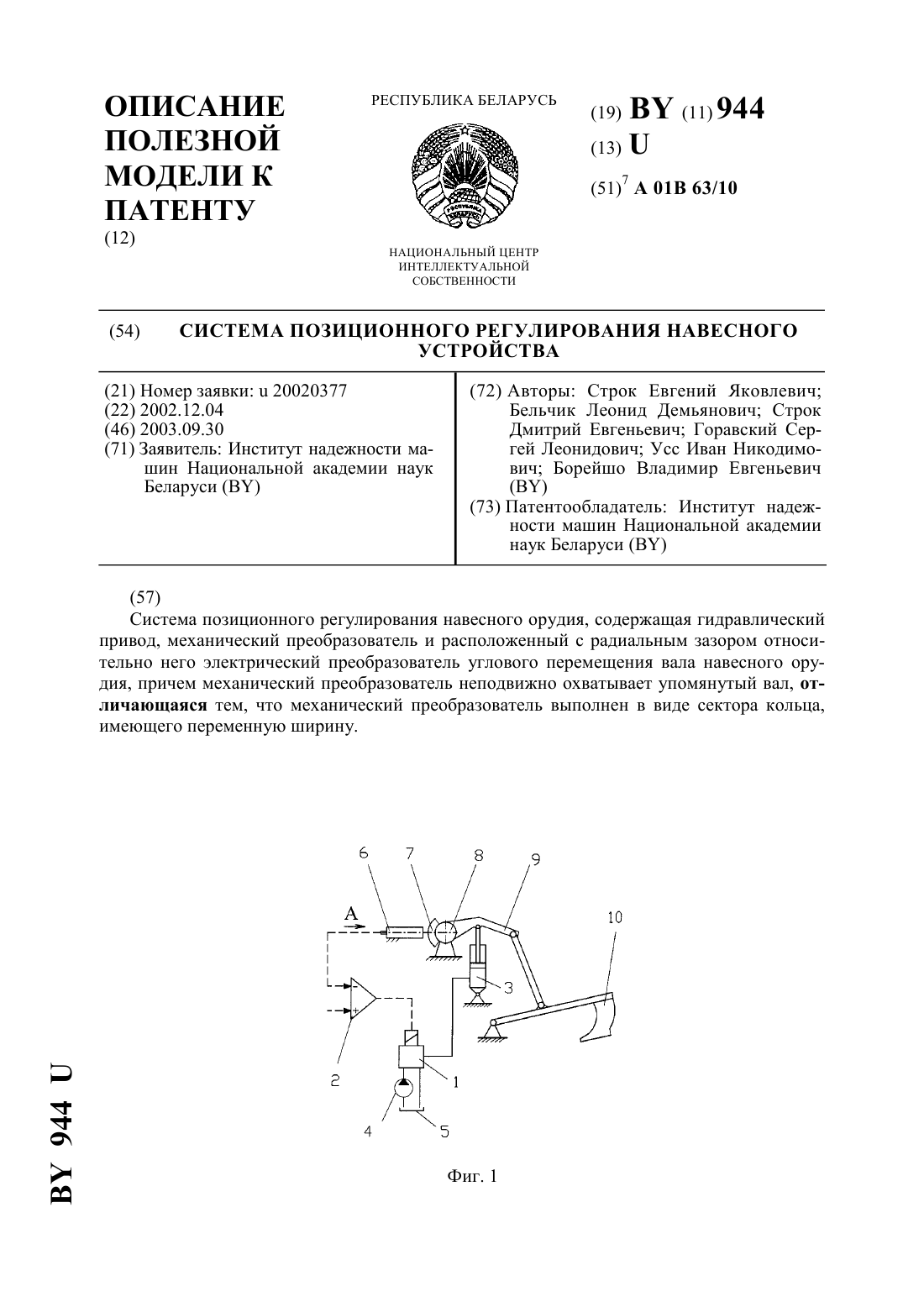
...в электронном усилителе и в зависимости от знака рассогласования срабатывает соответст 2 944 вующий электромагнит электрогидравлического усилителя, что приводит к корректирующему движению рабочего орудия 3. Наличие кинематической связи между штоком датчика положения и кулачком поворотного вала вызывает их механический износ. Все это в сочетании с износом поворотного вала в опорах приводит к высоким погрешностям измерения положения...
Гидравлическая система навесного устройства трактора
Номер патента: 7349
Опубликовано: 30.09.2005
Авторы: Максимук Юрий Леонидович, Пилипенко Владимир Иванович, Матюшкин Александр Михайлович, Усс Иван Никодимович, Макаренко Владимир Иванович, Мелешко Михаил Григорьевич, КЛЫШКО Николай Антонович, КАНАЕВ Сергей Алексеевич
МПК: A01B 63/10
Метки: гидравлическая, трактора, навесного, система, устройства
Текст:
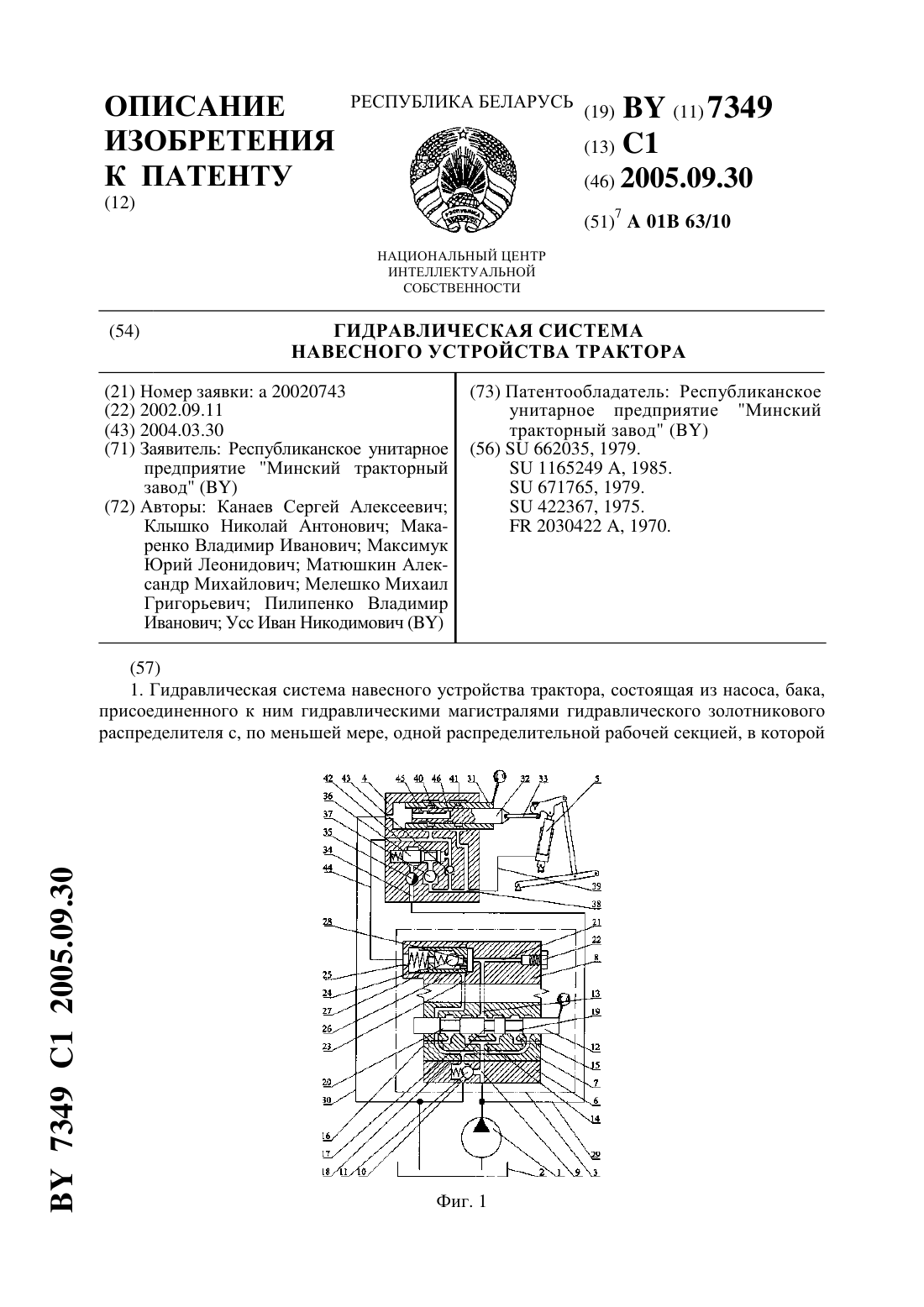
...14, также каналы 15 и 16, предназначенные для присоединения к ним внешних по отношению к трактору потребителей гидравлической энергии, и дугообразный сливной канал 17. На поверхности золотника 12 выполнены проточка 18, при нейтральной позиции золотника 12 соединяющая входной канал 14 с выходным каналом 13, и проточки 19 и 20. В задней крышке 8 расположены выходной канал 21 с заглушкой 22, соединенный с выходным каналом 13 рабочей секции 7, и...
Гидропневматическая система подрессоривания моста мобильной машины
Номер патента: U 3319
Опубликовано: 28.02.2007
Авторы: Ермаленок Валерий Генрихович, Ракицкий Антон Антонович, Высоцкий Михаил Степанович, Мажей Андрей Андреевич
МПК: B60G 17/04
Метки: моста, машины, система, мобильной, гидропневматическая, подрессоривания
Текст:
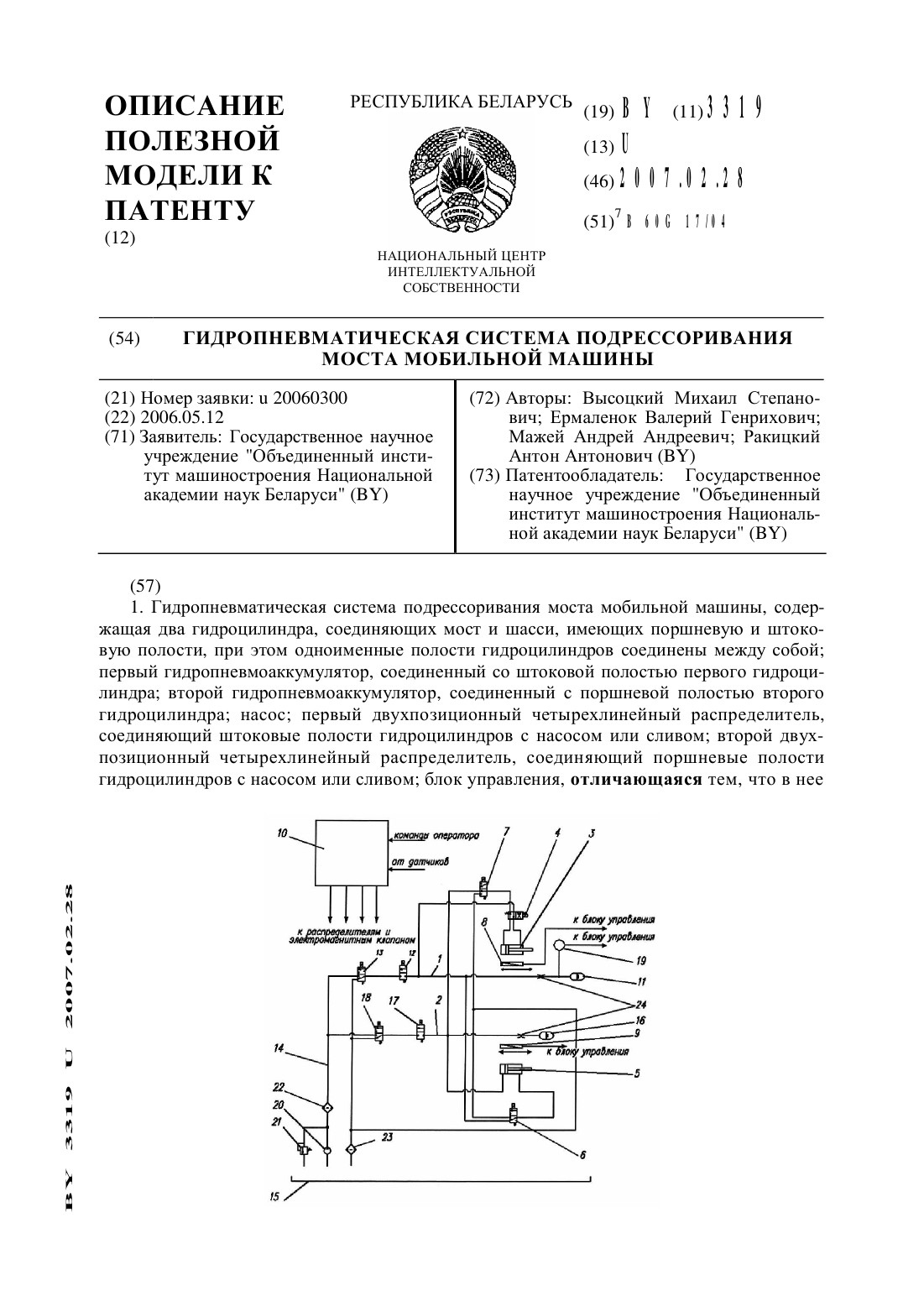
...двустороннего действия с общими поршневыми и штоковыми полостями к гидроцилиндрам одностороннего действия с независимым регулированием давления в поршневых полостях и обратно.Для решения поставленной задачи предлагается дополнить гидропневматическую подвеску тремя распределителями с электромагнитным управлением. Третий двухпозиционный четырехлинейный распределитель подключен к первому гидроцилиндру, соединяющему мост и шасси, и по команде...
Система измерения объема топлива в баке мобильной машины

Номер патента: U 2315
Опубликовано: 30.12.2005
Авторы: Худолей Андрей Леонидович, Гриценко Вячеслав Александрович
МПК: G01F 23/16
Метки: объема, система, мобильной, измерения, топлива, баке, машины
Текст:
...величина допускаемых деформаций тензодатчика должна быть больше, чем у материала эластичной мембраны. Все это связано с трудоемким подбором материалов и на практике сложно осуществимо. Кроме того, устройство не учитывает изменения плотности жидкой среды от температуры. 23152005.12.30 Задачей предлагаемой полезной модели является повышение точности и надежности измерения объема топлива в баке мобильной машины, обеспечение возможности проведения...
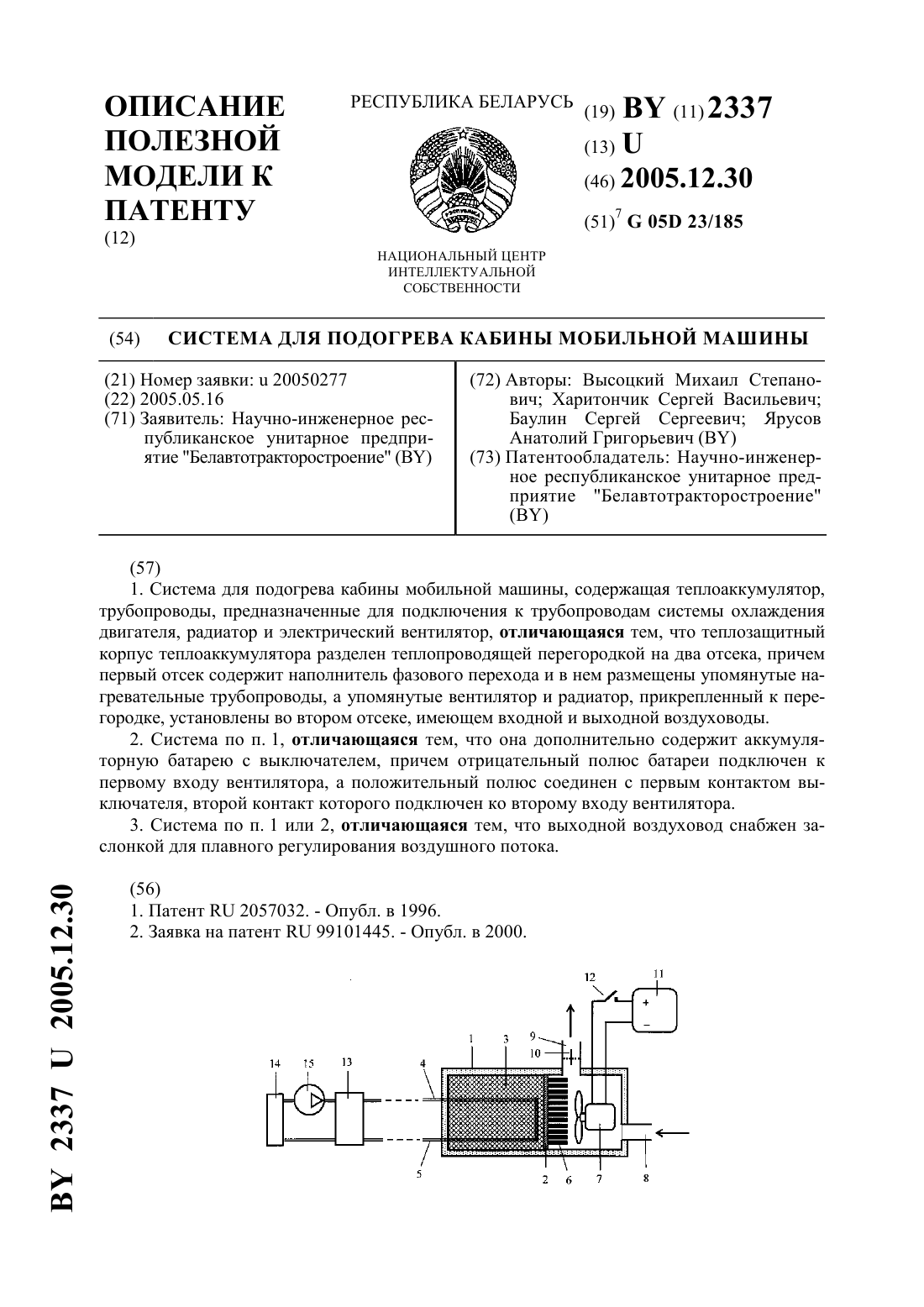
Система для подогрева кабины мобильной машины
Номер патента: U 2337
Опубликовано: 30.12.2005
Авторы: Харитончик Сергей Васильевич, Высоцкий Михаил Степанович, Ярусов Анатолий Григорьевич, Баулин Сергей Сергеевич
МПК: G05D 23/185
Метки: машины, кабины, мобильной, подогрева, система
Текст:
...теплоаккумулятора разделен теплопроводящей перегородкой на два отсека. Первый отсек содержит наполнитель фазового перехода, и в нем размещены упомянутые нагревательные трубопроводы, а упомянутые вентилятор и радиатор, прикрепленный к перегородке, установлены во втором отсеке,имеющем входной и выходной воздуховоды. Система дополнительно содержит аккумуляторную батарею с выключателем. Отрицательный полюс батареи подключен к первому входу...
Предыдущий патент: Способ хирургического лечения венечной гипоспадии
Следующий патент: Чувствительный элемент маятникового гравиметра
Случайный патент: Инструмент для пневмоцентробежной обработки цилиндрических поверхностей отверстий