Система позиционного регулирования навесного устройства
Номер патента: U 944
Опубликовано: 30.09.2003
Авторы: Усс Иван Никодимович, Борейшо Владимир Евгеньевич, Строк Дмитрий Евгеньевич, Строк Евгений Яковлевич, Горавский Сергей Леонидович, Бельчик Леонид Демьянович
Текст
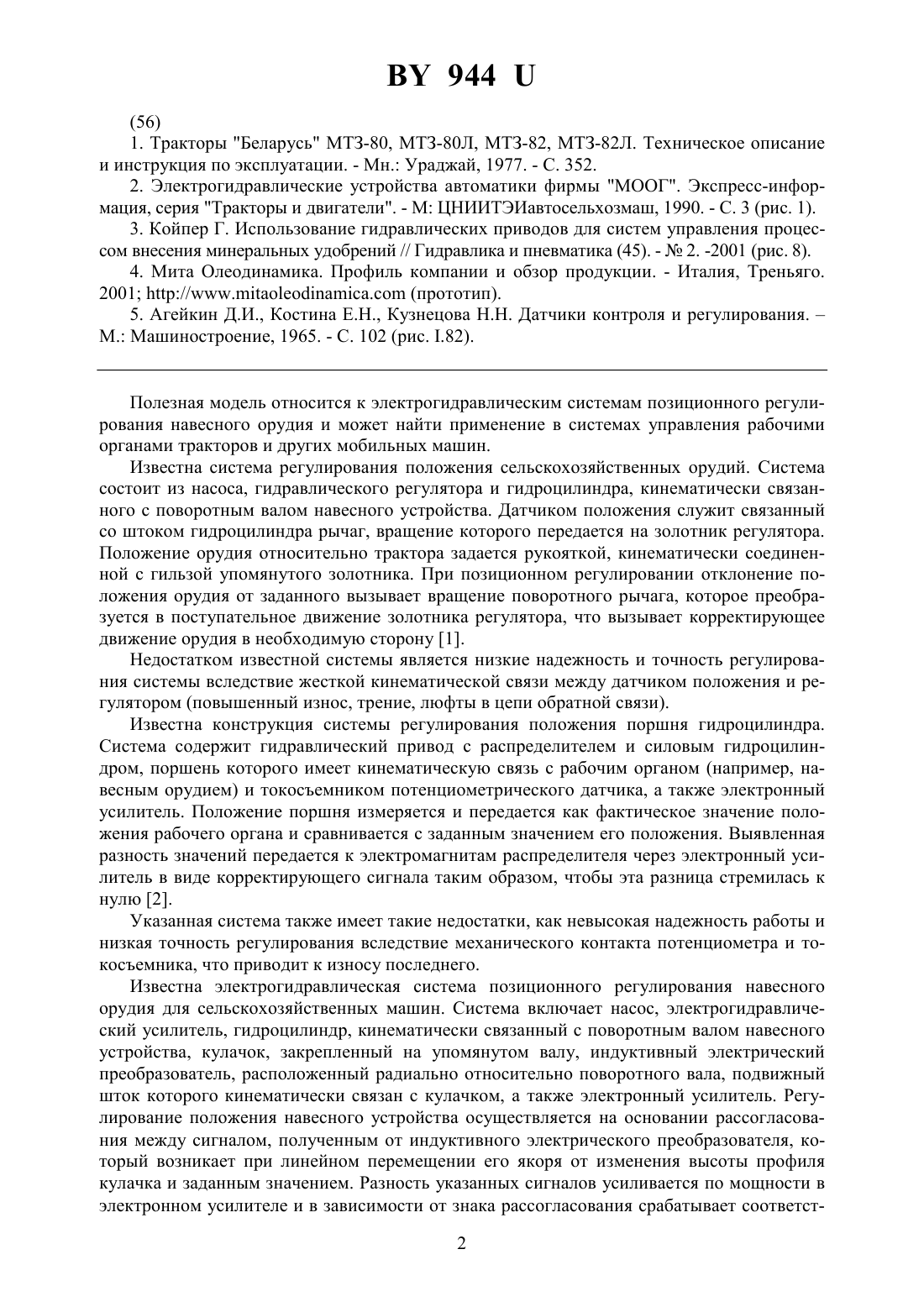
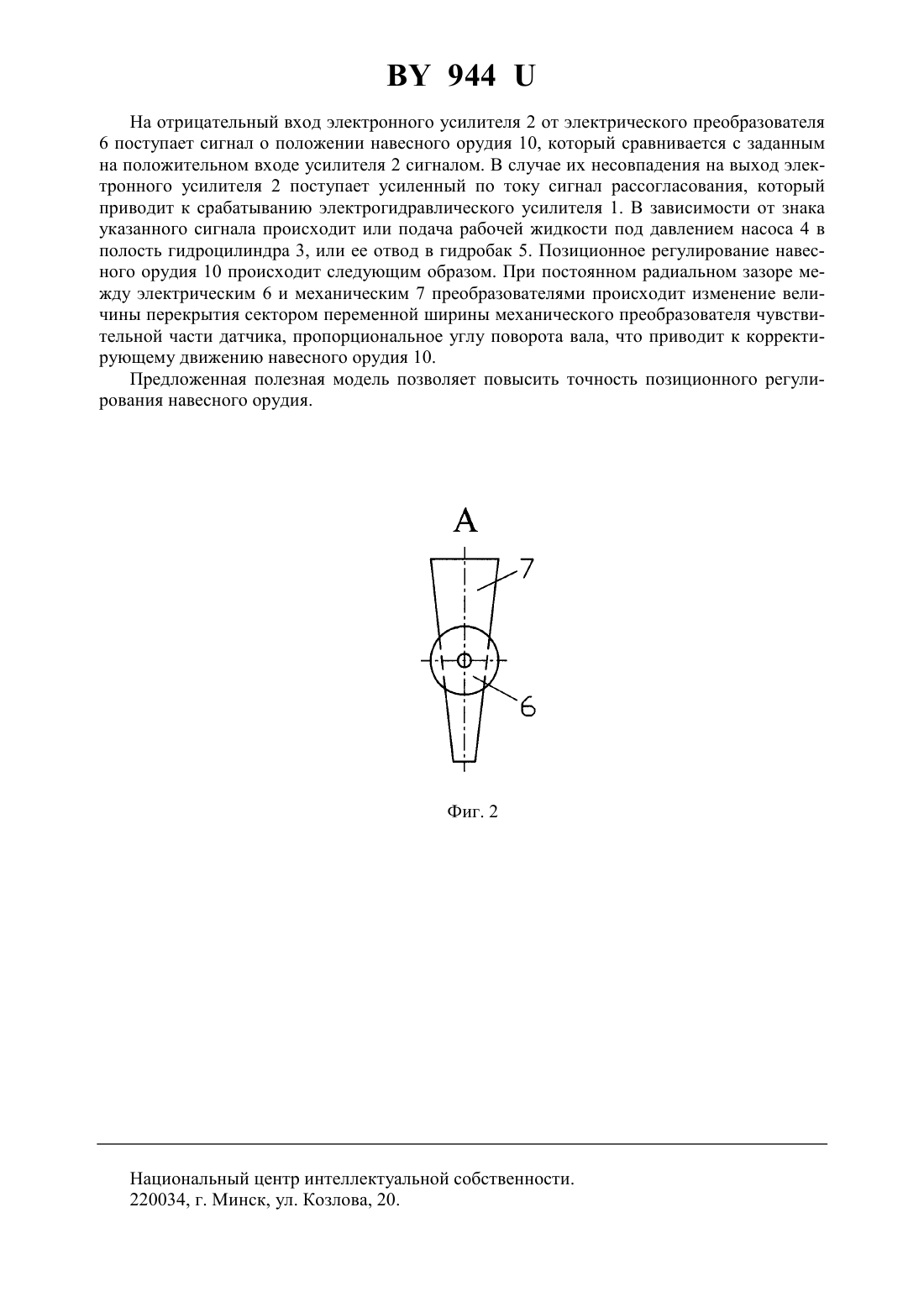
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА ПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ НАВЕСНОГО УСТРОЙСТВА(71) Заявитель Институт надежности машин Национальной академии наук Беларуси(72) Авторы Строк Евгений Яковлевич Бельчик Леонид Демьянович Строк Дмитрий Евгеньевич Горавский Сергей Леонидович Усс Иван Никодимович Борейшо Владимир Евгеньевич(73) Патентообладатель Институт надежности машин Национальной академии наук Беларуси(57) Система позиционного регулирования навесного орудия, содержащая гидравлический привод, механический преобразователь и расположенный с радиальным зазором относительно него электрический преобразователь углового перемещения вала навесного орудия, причем механический преобразователь неподвижно охватывает упомянутый вал, отличающаяся тем, что механический преобразователь выполнен в виде сектора кольца,имеющего переменную ширину.(56) 1. Тракторы Беларусь МТЗ-80, МТЗ-80 Л, МТЗ-82, МТЗ-82 Л. Техническое описание и инструкция по эксплуатации. - Мн. Ураджай, 1977. - С. 352. 2. Электрогидравлические устройства автоматики фирмы МООГ. Экспресс-информация, серия Тракторы и двигатели. - М ЦНИИТЭИавтосельхозмаш, 1990. - С. 3 (рис. 1). 3. Койпер Г. Использование гидравлических приводов для систем управления процессом внесения минеральных удобрений // Гидравлика и пневматика (45). -2. -2001 (рис. 8). 4. Мита Олеодинамика. Профиль компании и обзор продукции. - Италия, Треньяго. 2001 // (прототип). 5. Агейкин Д.И., Костина Е.Н., Кузнецова Н.Н. Датчики контроля и регулирования.М. Машиностроение, 1965. - С. 102 (рис. .82). Полезная модель относится к электрогидравлическим системам позиционного регулирования навесного орудия и может найти применение в системах управления рабочими органами тракторов и других мобильных машин. Известна система регулирования положения сельскохозяйственных орудий. Система состоит из насоса, гидравлического регулятора и гидроцилиндра, кинематически связанного с поворотным валом навесного устройства. Датчиком положения служит связанный со штоком гидроцилиндра рычаг, вращение которого передается на золотник регулятора. Положение орудия относительно трактора задается рукояткой, кинематически соединенной с гильзой упомянутого золотника. При позиционном регулировании отклонение положения орудия от заданного вызывает вращение поворотного рычага, которое преобразуется в поступательное движение золотника регулятора, что вызывает корректирующее движение орудия в необходимую сторону 1. Недостатком известной системы является низкие надежность и точность регулирования системы вследствие жесткой кинематической связи между датчиком положения и регулятором (повышенный износ, трение, люфты в цепи обратной связи). Известна конструкция системы регулирования положения поршня гидроцилиндра. Система содержит гидравлический привод с распределителем и силовым гидроцилиндром, поршень которого имеет кинематическую связь с рабочим органом (например, навесным орудием) и токосъемником потенциометрического датчика, а также электронный усилитель. Положение поршня измеряется и передается как фактическое значение положения рабочего органа и сравнивается с заданным значением его положения. Выявленная разность значений передается к электромагнитам распределителя через электронный усилитель в виде корректирующего сигнала таким образом, чтобы эта разница стремилась к нулю 2. Указанная система также имеет такие недостатки, как невысокая надежность работы и низкая точность регулирования вследствие механического контакта потенциометра и токосъемника, что приводит к износу последнего. Известна электрогидравлическая система позиционного регулирования навесного орудия для сельскохозяйственных машин. Система включает насос, электрогидравлический усилитель, гидроцилиндр, кинематически связанный с поворотным валом навесного устройства, кулачок, закрепленный на упомянутом валу, индуктивный электрический преобразователь, расположенный радиально относительно поворотного вала, подвижный шток которого кинематически связан с кулачком, а также электронный усилитель. Регулирование положения навесного устройства осуществляется на основании рассогласования между сигналом, полученным от индуктивного электрического преобразователя, который возникает при линейном перемещении его якоря от изменения высоты профиля кулачка и заданным значением. Разность указанных сигналов усиливается по мощности в электронном усилителе и в зависимости от знака рассогласования срабатывает соответст 2 944 вующий электромагнит электрогидравлического усилителя, что приводит к корректирующему движению рабочего орудия 3. Наличие кинематической связи между штоком датчика положения и кулачком поворотного вала вызывает их механический износ. Все это в сочетании с износом поворотного вала в опорах приводит к высоким погрешностям измерения положения орудия. Наиболее близким аналогом по совокупности существенных признаков с заявляемой полезной моделью является электрогидравлическая система позиционного регулирования навесного орудия, известная по рекламным проспектам фирмы Мита 4. Система содержит электрогидравлический усилитель, сообщенный со сливной и напорной магистралями, гидроцилиндр, кинематически связанный с поворотным валом навесного устройства и орудием посредством механизма навески, механический преобразователь угла перемещения поворотного вала, выполненный в виде кулачка, закрепленного на упомянутом валу, электрический преобразователь, установленный радиально с зазором относительно механического преобразователя, а также электронный усилитель. При перемещении навесного орудия происходит изменение величины зазора между механическим и электрическим преобразователями. Полученный сигнал поступает в электронный усилитель, где сравнивается по величине с заданным значением. Усиленный сигнал рассогласования управляет электромагнитами гидравлического усилителя, который осуществляет подачу рабочей жидкости из напорной магистрали в гидроцилиндр или ее выпуск. Электрический преобразователь представляет собой датчик, принцип действия которого основан на получении выходного сигнала при приближении или удалении металлической массы 5. Недостатком указанной системы является влияние износа поворотного вала в опорах на точность измерения положения навесного орудия вследствие совпадения направления вектора износа упомянутого вала и вектора измерения выходного параметра электрического преобразователя. Задачей настоящей полезной модели является исключение влияния износа поворотного вала на регулируемый параметр, что позволяет повысить точность позиционирования навесного орудия. Решение указанной задачи реализовано в системе позиционного регулирования, содержащей гидравлический привод, механический и расположенный с радиальным зазором относительно него электрический преобразователи углового перемещения вала навесного орудия, причем механический преобразователь неподвижно охватывает упомянутый вал. В предлагаемом техническом решении механический преобразователь выполнен в виде сектора кольца, имеющего переменную ширину. Это приводит к повышению точности регулирования за счет ортогональной направленности вектора радиального износа поворотного вала в опорах и вектора измерения выходного параметра электрического преобразователя. На фиг. 1 изображен общий вид системы позиционного регулирования. На фиг. 2 - вид по стрелке А фиг. 1 (взаимное расположение электрического и механического преобразователей). Электрогидравлическая система позиционного регулирования навесного устройства содержит электрогидравлический усилитель 1, электрически связанный с электронным усилителем 2 и гидравлически сообщенный с гидроцилиндром 3, а также с насосом 4 и гидробаком 5. Электронный усилитель 2 электрически связан с электрическим преобразователем 6, установленным с радиальным зазором относительно механического преобразователя 7, который неподвижно охватывает вал 8 механизма навески 9. Шток гидроцилиндра 3 кинематически связан с навесным орудием 10 и поворотным валом 8 посредством механизма навески 9. Устройство работает следующим образом. 944 На отрицательный вход электронного усилителя 2 от электрического преобразователя 6 поступает сигнал о положении навесного орудия 10, который сравнивается с заданным на положительном входе усилителя 2 сигналом. В случае их несовпадения на выход электронного усилителя 2 поступает усиленный по току сигнал рассогласования, который приводит к срабатыванию электрогидравлического усилителя 1. В зависимости от знака указанного сигнала происходит или подача рабочей жидкости под давлением насоса 4 в полость гидроцилиндра 3, или ее отвод в гидробак 5. Позиционное регулирование навесного орудия 10 происходит следующим образом. При постоянном радиальном зазоре между электрическим 6 и механическим 7 преобразователями происходит изменение величины перекрытия сектором переменной ширины механического преобразователя чувствительной части датчика, пропорциональное углу поворота вала, что приводит к корректирующему движению навесного орудия 10. Предложенная полезная модель позволяет повысить точность позиционного регулирования навесного орудия. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: A01B 63/10
Метки: навесного, система, устройства, позиционного, регулирования
Код ссылки
<a href="https://by.patents.su/4-u944-sistema-pozicionnogo-regulirovaniya-navesnogo-ustrojjstva.html" rel="bookmark" title="База патентов Беларуси">Система позиционного регулирования навесного устройства</a>
Система для регулирования расхода теплоносителя
Номер патента: 2213
Опубликовано: 30.06.1998
Автор: Ошурков Сергей Михайлович
МПК: G05D 23/01, G05D 23/02, F24D 10/00...
Метки: теплоносителя, система, расхода, регулирования
Текст:
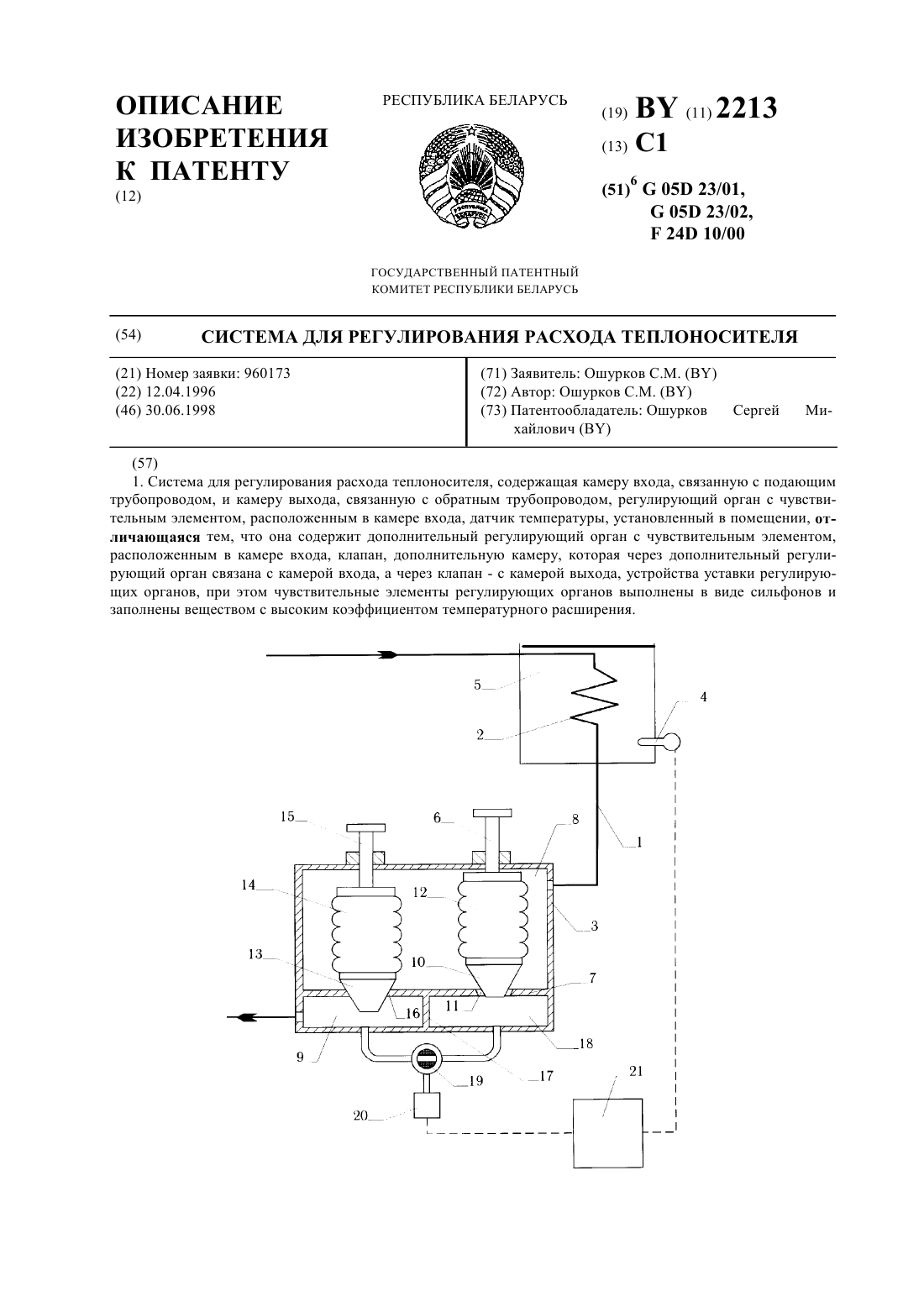
...орган связана с камерой входа, а через клапан - с камерой выхода, устройства уставки регулирующих органов, при этом чувствительные элементы регулирующих органов выполнены в виде сильфонов и заполнены веществом с высоким коэффициентом температурного расширения. Наличие указанных дополнительных элементов системы позволяет обеспечить прямое регулирование температуры теплоносителя и при установке регулятора этой системы в обратном...
Система автоматического регулирования дымности отработавших газов дизельного двигателя транспортного средства
Номер патента: 820
Опубликовано: 15.08.1995
Авторы: Корчагов Валерий Евгеньевич, Ждановский Анатолий Анатольевич, Фут Арнольд Оттович, Умрейко Дмитрий Степанович, Высоцкий Михаил Степанович, Виленчиц Болеслав Болеславович
МПК: F02D 41/00
Метки: дизельного, газов, двигателя, автоматического, средства, дымности, отработавших, транспортного, регулирования, система
Текст:
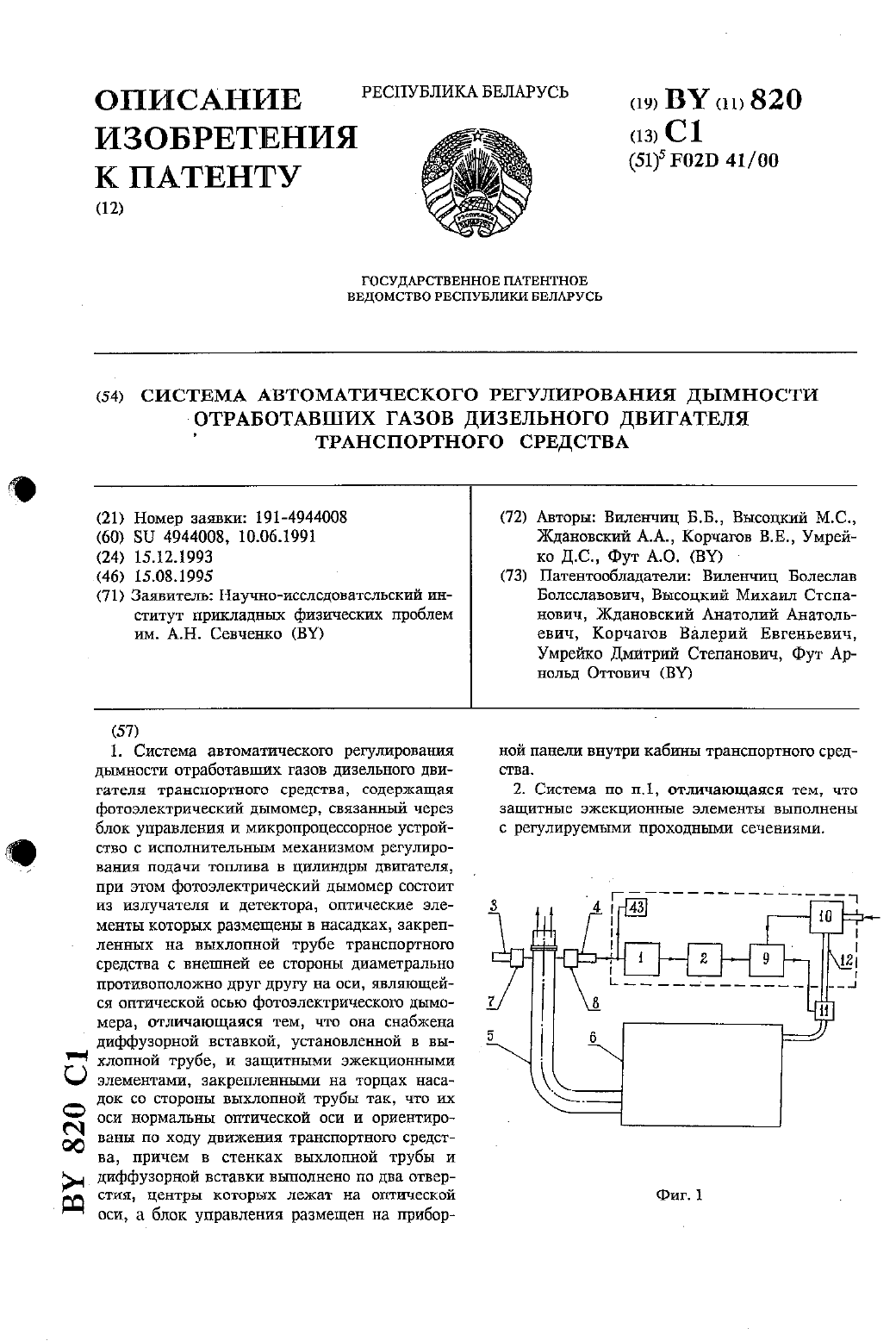
...17, имеющая в узкой части радиальные отверстия 18, установлена внутри выхлопной трубы 5 при помощи оголовка 19 так, что отверстия 18 точно совпадают с отверстиями 16 этой же трубы 5.Внутри насадки З установлен излучатель 20 оптического излучения дымомера с оптическими элементами 21, а внутри насадки 4 - детектор 22 оптического Излучения дымомера с оптическими элементами 23.Корпуса идентичных защитных эжекционных элементов 7 и 8 образованы...
Система регулирования натяжения раската в черновой группе клетей непрерывного прокатного стана
Номер патента: 136
Опубликовано: 30.09.1994
Авторы: Рассадин В. М., Зиберт В. П., Мачулин В. М., Дышлевич В. Ф., Силантьев М. А.
МПК: B21B 37/06, B21B 37/00
Метки: раската, группе, черновой, прокатного, регулирования, непрерывного, натяжения, система, клетей, стана
Текст:
...18. воздействуя на заданное значение скорости регулятор 3 скорости привода предыдущей клети. Уантегратор 18 стремится сигнал с сумматора 13 сделать раеньтм нулю. что соответствует заданнотнчу мехккпетевогхчу натвжению. Сигнал с сумматора 14 поступает также в устройство, регулирующее натяжение в предыдущем тиежклетевом промежутке (сигнал ХЗ. По мере продвижения головы заготовки вступает а работу устройство оегулирующее натяжение в...
Способ регулирования температуры во фруктохранилище и система для его осуществления
Номер патента: 3492
Опубликовано: 30.09.2000
Автор: Волчок Владимир Петрович
МПК: F25D 17/06
Метки: регулирования, температуры, осуществления, фруктохранилище, способ, система
Текст:
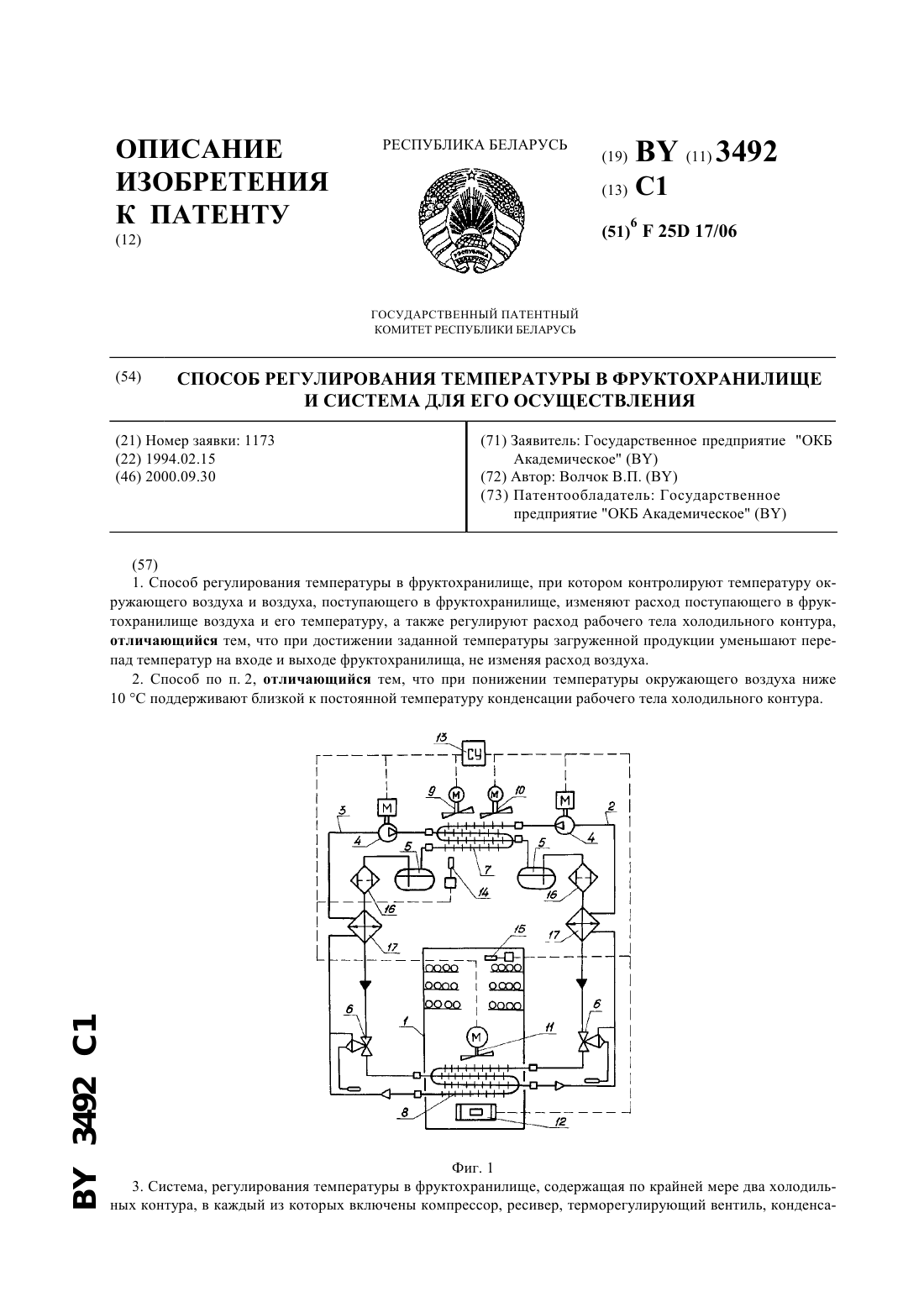
...заявляемого способа. На фиг. 2 показано изменение полезной хладопроизводительностихолодильного контура и мощности, потребляемой системой в зависимости от температуры окружающего воздухана режиме длительного хранения продукции. При этом характеристики заявляемой системы изображены сплошными линиями, а системы, принятой за прототип, - пунктирными. Система содержит хранилище 1, а также холодильное оборудование, подключеное по крайней мере в два...
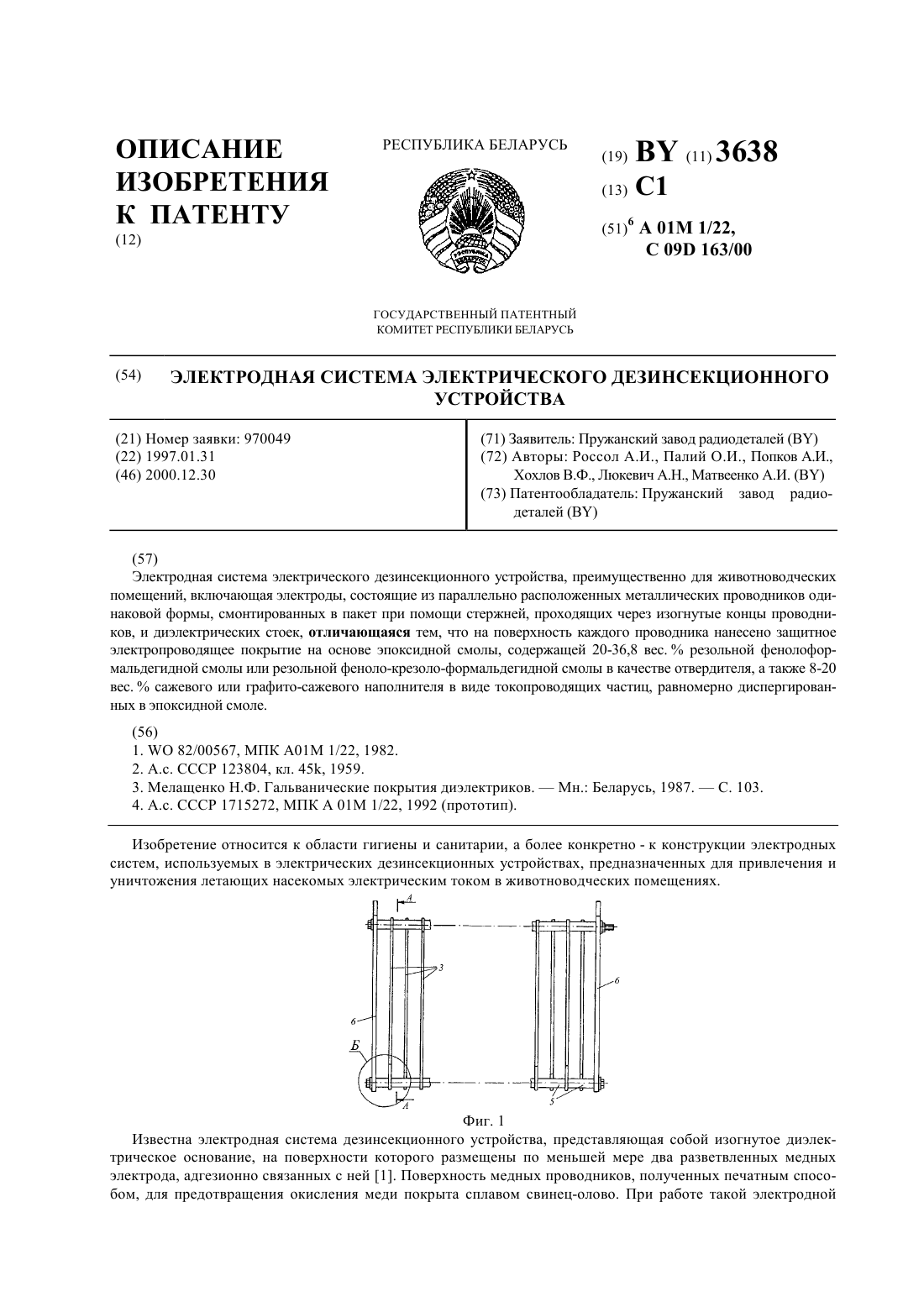
Электродная система электрического дезинсекционного устройства
Номер патента: 3638
Опубликовано: 30.12.2000
Авторы: Хохлов Владимир Федорович, Люкевич Александр Николаевич, Попков Александр Иванович, Палий Олег Иванович, Матвеенко Александр Иванович, Россол Александр Иванович
МПК: C09D 163/00, A01M 1/22
Метки: электродная, устройства, система, дезинсекционного, электрического
Текст:
...наполнителя при использовании в качестве отвердителя резольной фенолоформальдегидной смолы или резольной феноло-крезоло-формальдегидной смолы, при следующем соотношении компонентов(вес. ) наполнитель 8-20 совмещенная с отвердителем эпоксидная смола остальное,обеспечивает композиции, после отверждения в виде покрытия, стабильные электропроводные свойства и стойкость покрытия к электроэрозии при инициировании высоковольтного разряда (3-4...
Предыдущий патент: Устройство для электроконтактной наплавки внутренних цилиндрических поверхностей деталей
Следующий патент: Приточный вентиляционный оконный блок
Случайный патент: Способ производства кваса