Грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов
Номер патента: U 5414
Опубликовано: 30.08.2009
Авторы: Основина Лариса Григорьевна, Основин Сергей Викторович, Агейчик Валерий Александрович

Текст
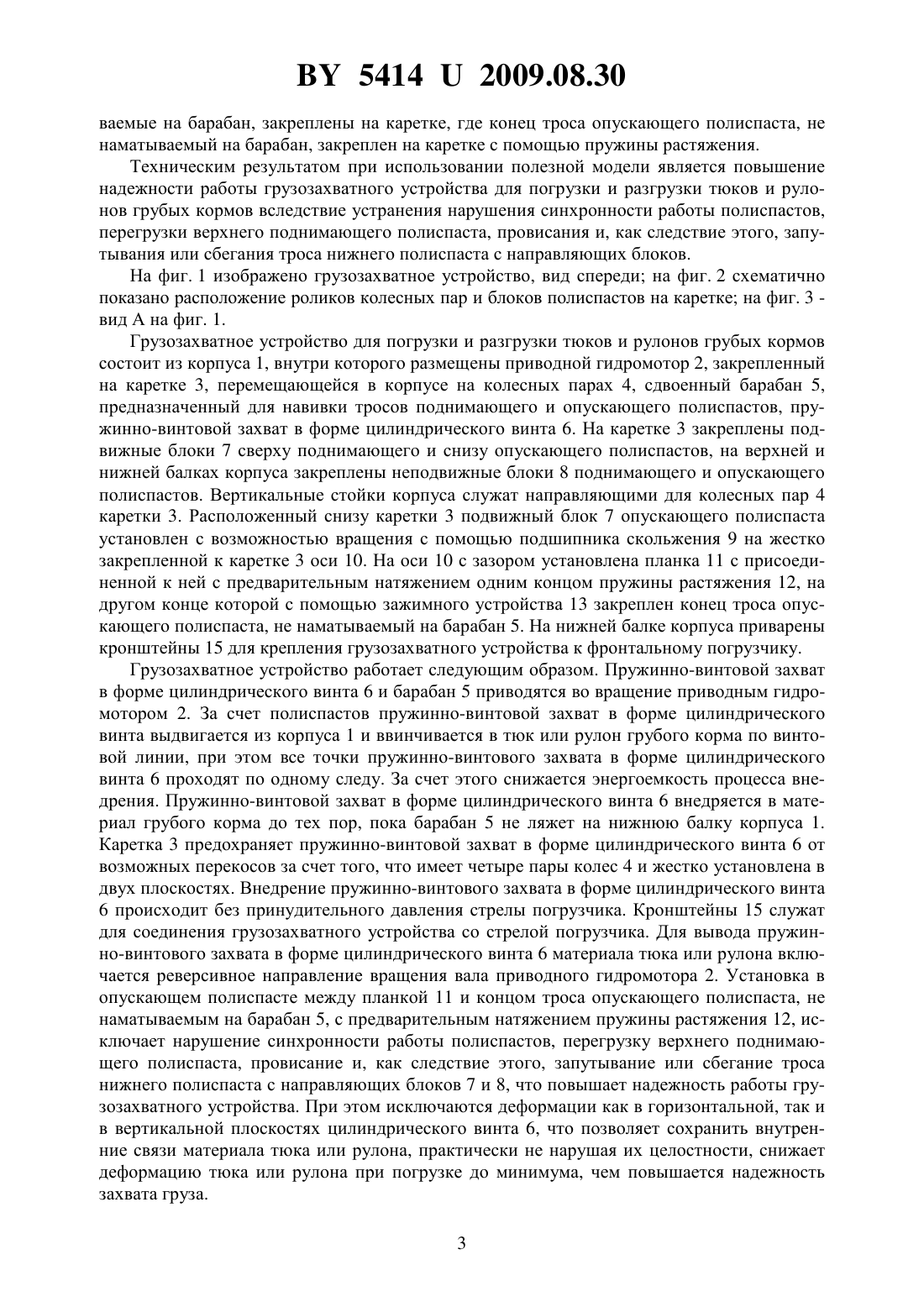
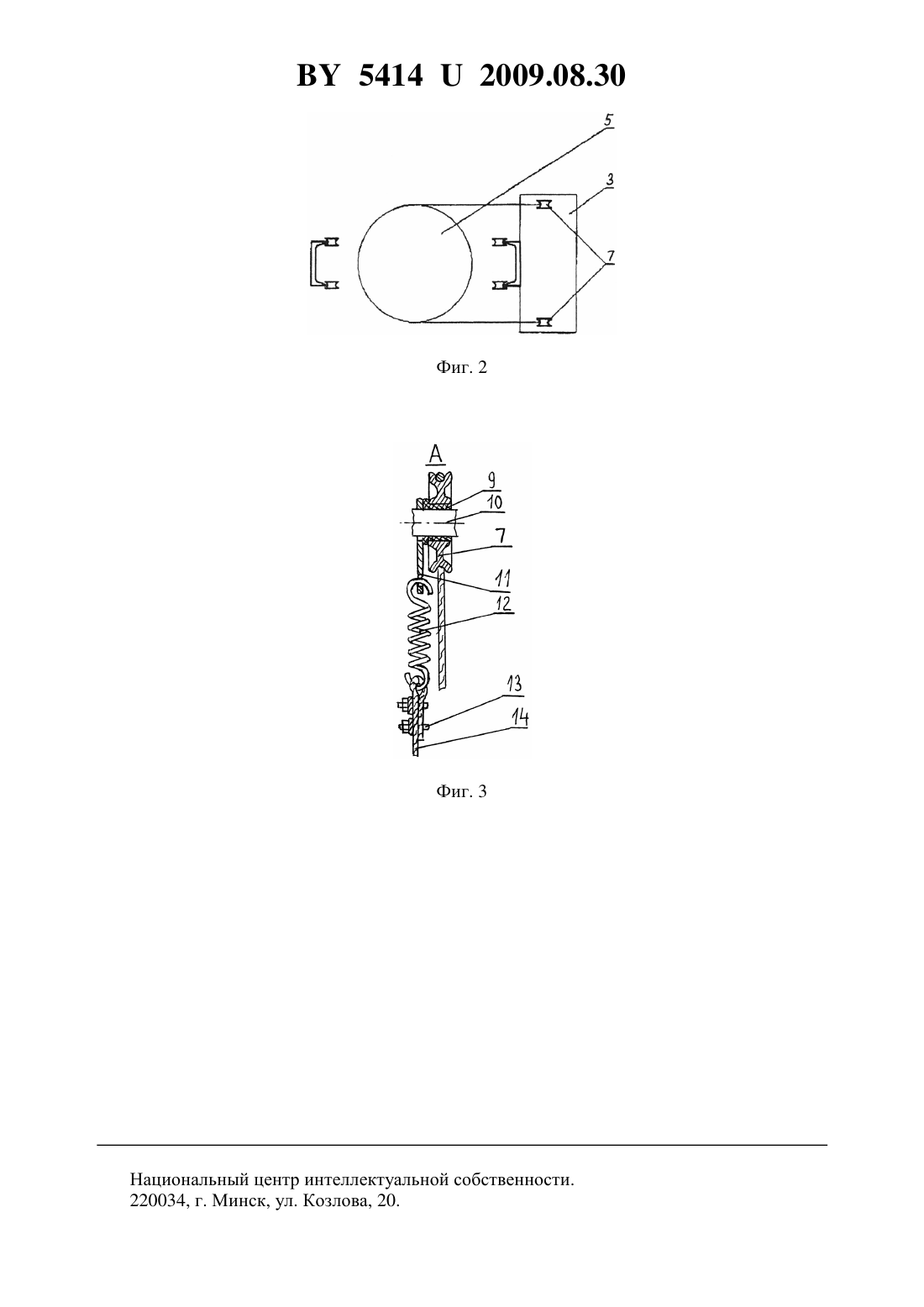
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОГРУЗКИ И РАЗГРУЗКИ ТЮКОВ И РУЛОНОВ ГРУБЫХ КОРМОВ(71) Заявитель Учреждение образования Белорусский государственный аграрный технический университет(72) Авторы Основин Сергей Викторович Основина Лариса Григорьевна Агейчик Валерий Александрович(73) Патентообладатель Учреждение образования Белорусский государственный аграрный технический университет(57) Грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов,включающее помещенные в корпус приводной гидромотор и пружинно-винтовой захват в форме цилиндрического винта, снабженного поднимающим и опускающим полиспастами с блоками и тросами, сдвоенным барабаном и кареткой, причем корпус имеет верхнюю и нижнюю балки, а сдвоенный барабан для навивки тросов полиспастов соединен с приводным гидромотором, закрепленным на каретке, установленной внутри корпуса, при этом блоки полиспастов закреплены на каретке, верхней и нижней балках корпуса, а концы тросов полиспастов, не наматываемые на барабан, закреплены на каретке, отличающееся тем, что конец троса опускающего полиспаста, не наматываемый на барабан, закреплен на каретке с помощью пружины растяжения.(56) 1. Патент на изобретение РФ 2099921 С 1, МПК А 01 87/12 С 2, 1997. 2. Патент на изобретение РФ 2225690 С 2, МПК А 01 87/12 С 2, 2004. Полезная модель относится к механизации сельского хозяйства, а именно грузозахватным устройствам для погрузки и разгрузки тюков и рулонов грубых кормов. Известен 1 грузозахватный орган, представляющий собой рамку с фиксирующими зубьями и винтовой захват, соединенный с приводным механизмом, причем винтовой захват имеет форму цилиндра и установлен вместе с гидродвигателем и редуктором в корпусе, на котором установлена направляющая, охватывающая его и изогнутая по радиусу цилиндрического винта. Такой грузозахватный орган имеет низкую надежность, высокую энергоемкость, так как в процессе работы цилиндрический винт, вращаясь, перемещается по направляющей и, выдвигаясь из корпуса, ввинчивается в рулон по окружности, увлекая за собой приводной механизм, который перемещается по направляющим в вертикальном направлении. После погрузки цилиндрический винт выводится включением реверсивного направления вращения вала гидродвигателя. При внедрении цилиндрического винта возможны его деформации как в горизонтальной, так и в вертикальной плоскостях, что может привести к заклиниванию винта в направляющей ввиду того, что при деформации изменяется диаметр и шаг винта, а направляющая сделана жесткой и не изменяет своих параметров. Наличие жесткой направляющей приводит к высоким потерям энергии на преодоление сил трения, возникающих между направляющей и цилиндрическим винтом. Известно 2 грузозахватное устройство, предназначенное для погрузки и разгрузки тюков и рулонов грубых кормов, включающее помещенные в корпус приводной гидромотор и пружинно-винтовой захват в форме цилиндрического винта, снабженного поднимающим и опускающим полиспастами с блоками и тросами, сдвоенным барабаном и кареткой, причем корпус имеет верхнюю и нижнюю балки, а сдвоенный барабан для навивки тросов полиспастов соединен с приводным гидромотором, закрепленным на каретке, установленной внутри корпуса, при этом блоки полиспастов закреплены на каретке, верхней и нижней балках корпуса, а концы тросов полиспастов, не наматываемые на барабан, закреплены на каретке. Такой грузозахватный орган имеет низкую надежность, так как поднимающий и опускающий полиспасты с блоками и тросами, работая синхронно, подвергаются разной степени загрузки, причем в работающем в более нагруженных условиях верхнем поднимающем полиспасте блоки и трос в большей степени подвержены деформации и перекосам, чем в опускающем полиспасте, усилие которого совпадает с направлением силы тяжести, что приводит к нарушению синхронности работы полиспастов, перегрузке верхнего поднимающего полиспаста, провисанию и, как следствие этого, запутыванию или сбеганию троса нижнего полиспаста с направляющих блоков. Задача, которую решает полезная модель, заключается в повышении надежности работы грузозахватного устройства для погрузки и разгрузки тюков и рулонов грубых кормов. Поставленная задача решается с помощью грузозахватного устройства для погрузки и разгрузки тюков и рулонов грубых кормов, включающего помещенные в корпус приводной гидромотор и пружинно-винтовой захват в форме цилиндрического винта, снабженного поднимающим и опускающим полиспастами с блоками и тросами, сдвоенным барабаном и кареткой, причем корпус имеет верхнюю и нижнюю балки, а сдвоенный барабан для навивки тросов полиспастов соединен с приводным гидромотором, закрепленным на каретке, установленной внутри корпуса, при этом блоки полиспастов закреплены на каретке, верхней и нижней балках корпуса, а концы тросов полиспастов, не наматы 2 54142009.08.30 ваемые на барабан, закреплены на каретке, где конец троса опускающего полиспаста, не наматываемый на барабан, закреплен на каретке с помощью пружины растяжения. Техническим результатом при использовании полезной модели является повышение надежности работы грузозахватного устройства для погрузки и разгрузки тюков и рулонов грубых кормов вследствие устранения нарушения синхронности работы полиспастов,перегрузки верхнего поднимающего полиспаста, провисания и, как следствие этого, запутывания или сбегания троса нижнего полиспаста с направляющих блоков. На фиг. 1 изображено грузозахватное устройство, вид спереди на фиг. 2 схематично показано расположение роликов колесных пар и блоков полиспастов на каретке на фиг. 3 вид А на фиг. 1. Грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов состоит из корпуса 1, внутри которого размещены приводной гидромотор 2, закрепленный на каретке 3, перемещающейся в корпусе на колесных парах 4, сдвоенный барабан 5,предназначенный для навивки тросов поднимающего и опускающего полиспастов, пружинно-винтовой захват в форме цилиндрического винта 6. На каретке 3 закреплены подвижные блоки 7 сверху поднимающего и снизу опускающего полиспастов, на верхней и нижней балках корпуса закреплены неподвижные блоки 8 поднимающего и опускающего полиспастов. Вертикальные стойки корпуса служат направляющими для колесных пар 4 каретки 3. Расположенный снизу каретки 3 подвижный блок 7 опускающего полиспаста установлен с возможностью вращения с помощью подшипника скольжения 9 на жестко закрепленной к каретке 3 оси 10. На оси 10 с зазором установлена планка 11 с присоединенной к ней с предварительным натяжением одним концом пружины растяжения 12, на другом конце которой с помощью зажимного устройства 13 закреплен конец троса опускающего полиспаста, не наматываемый на барабан 5. На нижней балке корпуса приварены кронштейны 15 для крепления грузозахватного устройства к фронтальному погрузчику. Грузозахватное устройство работает следующим образом. Пружинно-винтовой захват в форме цилиндрического винта 6 и барабан 5 приводятся во вращение приводным гидромотором 2. За счет полиспастов пружинно-винтовой захват в форме цилиндрического винта выдвигается из корпуса 1 и ввинчивается в тюк или рулон грубого корма по винтовой линии, при этом все точки пружинно-винтового захвата в форме цилиндрического винта 6 проходят по одному следу. За счет этого снижается энергоемкость процесса внедрения. Пружинно-винтовой захват в форме цилиндрического винта 6 внедряется в материал грубого корма до тех пор, пока барабан 5 не ляжет на нижнюю балку корпуса 1. Каретка 3 предохраняет пружинно-винтовой захват в форме цилиндрического винта 6 от возможных перекосов за счет того, что имеет четыре пары колес 4 и жестко установлена в двух плоскостях. Внедрение пружинно-винтового захвата в форме цилиндрического винта 6 происходит без принудительного давления стрелы погрузчика. Кронштейны 15 служат для соединения грузозахватного устройства со стрелой погрузчика. Для вывода пружинно-винтового захвата в форме цилиндрического винта 6 материала тюка или рулона включается реверсивное направление вращения вала приводного гидромотора 2. Установка в опускающем полиспасте между планкой 11 и концом троса опускающего полиспаста, не наматываемым на барабан 5, с предварительным натяжением пружины растяжения 12, исключает нарушение синхронности работы полиспастов, перегрузку верхнего поднимающего полиспаста, провисание и, как следствие этого, запутывание или сбегание троса нижнего полиспаста с направляющих блоков 7 и 8, что повышает надежность работы грузозахватного устройства. При этом исключаются деформации как в горизонтальной, так и в вертикальной плоскостях цилиндрического винта 6, что позволяет сохранить внутренние связи материала тюка или рулона, практически не нарушая их целостности, снижает деформацию тюка или рулона при погрузке до минимума, чем повышается надежность захвата груза. 3 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: A01D 87/00
Метки: грузозахватное, грубых, тюков, погрузки, кормов, разгрузки, рулонов, устройство
Код ссылки
<a href="https://by.patents.su/4-u5414-gruzozahvatnoe-ustrojjstvo-dlya-pogruzki-i-razgruzki-tyukov-i-rulonov-grubyh-kormov.html" rel="bookmark" title="База патентов Беларуси">Грузозахватное устройство для погрузки и разгрузки тюков и рулонов грубых кормов</a>
Устройство фрезерного типа для отделения и подачи стебельчатых кормов

Номер патента: U 1080
Опубликовано: 30.12.2003
Авторы: Жандаренко Олег Борисович, Казаченок Сергей Алексеевич, Башко Юрий Александрович, Беспалко Леонид Николаевич, Осипов Евгений Александрович, Китиков Вадим Олегович
МПК: A01K 5/02, A01F 29/00
Метки: кормов, фрезерного, устройство, подачи, отделения, типа, стебельчатых
Текст:
...путем установки дополнительных защитных пластин у торцов кронштейнов со стороны винтового крепления ножей, что обеспечивает защиту винтового крепления ножей, а также увеличивает швырьковый эффект при подаче отделенного кормового материала, а для увеличения срока эксплуатации ножа его режущая кромка выполнена волнистой в виде двух и более гребней. На фиг. 1. изображен общий вид устройства для отделения и подачи стебельчатых кормов на фиг. 2 -...
Передвижное конвейерное устройство для сбора, обработки и погрузки корнеплодов

Номер патента: U 4911
Опубликовано: 30.12.2008
Автор: Петушок Андрей Николаевич
МПК: A01D 17/00
Метки: погрузки, устройство, сбора, обработки, конвейерное, корнеплодов, передвижное
Текст:
...к транспортному средству, обеспечивающую передвижение конвейерной системы по мере заполнения транспортного средства. Существенностью отличий предлагаемой полезной модели от прототипа является то,что собирающий транспортер установлен на опорном колесе горизонтально на низком уровне, полотно которого разделено бортиками на калибровочные полосы. Благодаря этому рабочие сухую, чистую картошку с земли кладут на соответствующие размеру...
Устройство для разгрузки смерзшихся сыпучих материалов из полувагонов
Номер патента: U 3446
Опубликовано: 30.04.2007
Авторы: Ковенский Валерий Исаакович, Ковенский Геннадий Исаакович
МПК: B65G 67/00
Метки: разгрузки, устройство, сыпучих, материалов, полувагонов, смерзшихся
Текст:
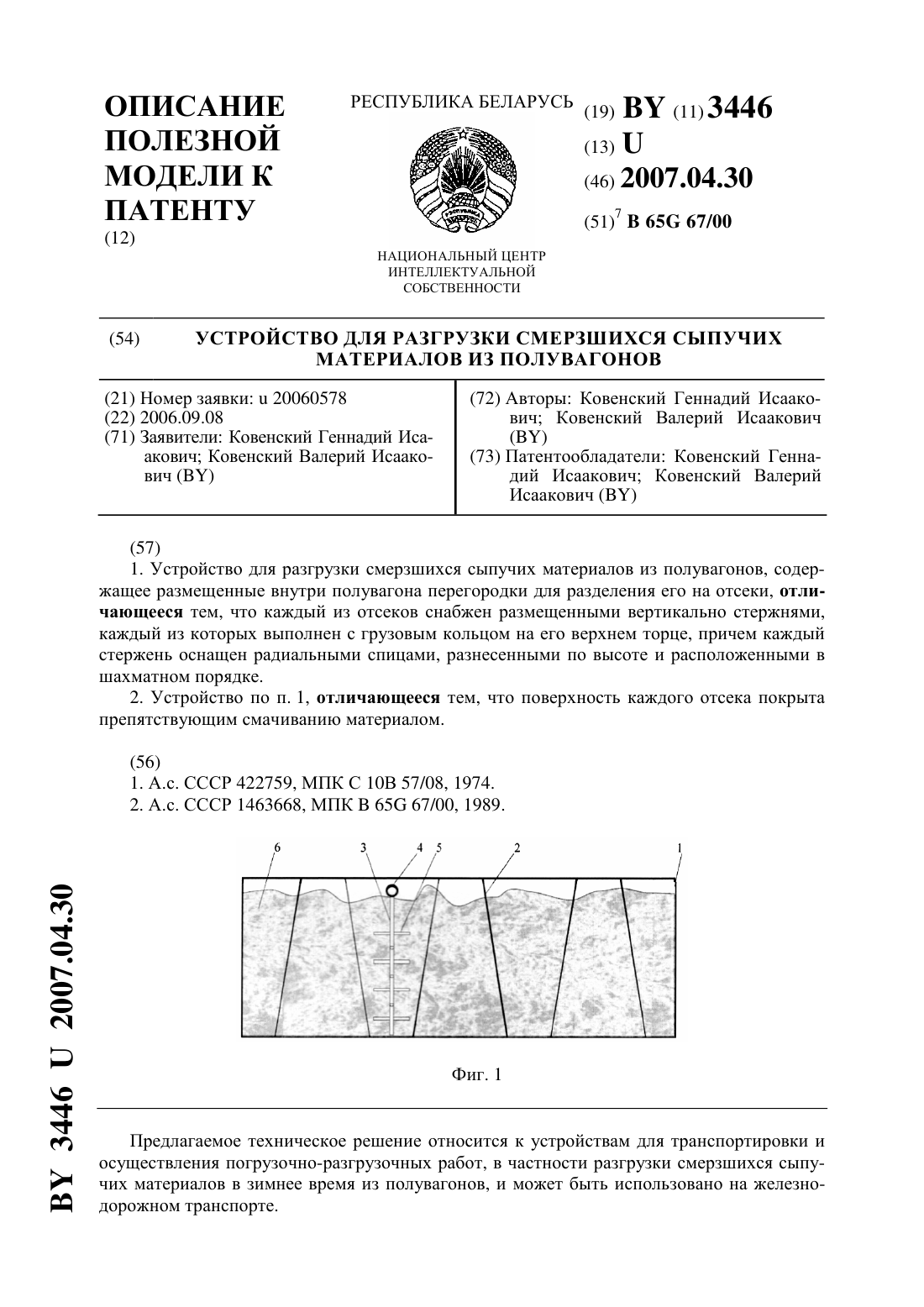
...сжатый воздух выпускают и подают в камеры теплоноситель. Груз, контактирующий со стенкой, оттаивает. Для защиты камер используют металлические листы, а для более эффективного отделения листов от смерзшегося груза их выполняют из сплава, обладающего эффектом памяти формы. Недостатками известного устройства являются ненадежность и сложность конструкции перегородок необходимость наличия специального источника тепла и оборудования для...
Устройство для разматывания рулонов стеблей лубяных культур
Номер патента: U 4759
Опубликовано: 30.10.2008
Авторы: Зыбайло Вадим Вячеславович, Перевозников Василий Николаевич, Стасюк Валерий Петрович, Тарима Александр Иванович
МПК: D01B 1/00
Метки: разматывания, лубяных, рулонов, культур, стеблей, устройство
Текст:
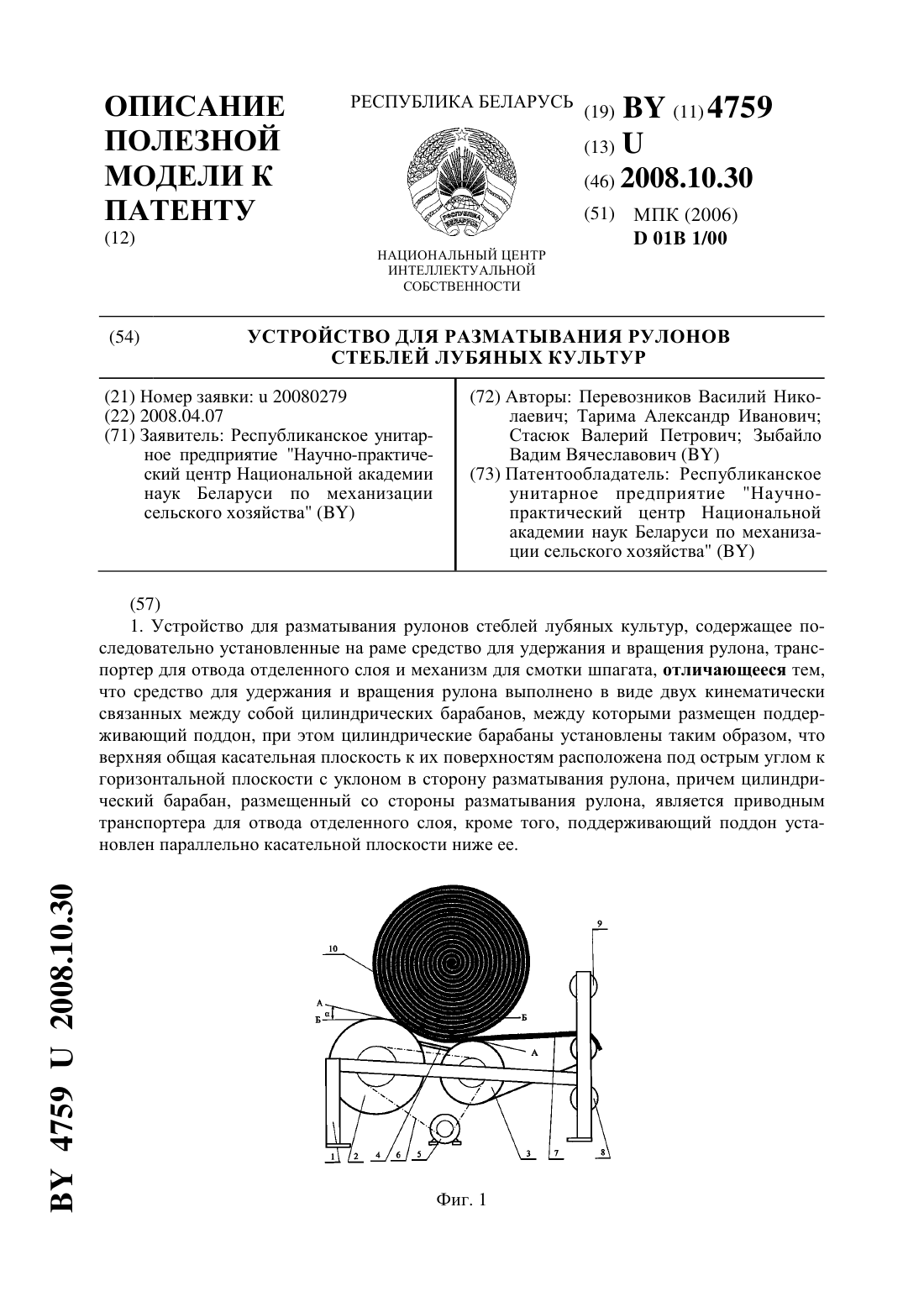
...Поставленная задача решается тем, что в устройстве для разматывания рулонов стеблей лубяных культур, содержащем последовательно установленные на раме средство для удержания и вращения рулона, транспортер для отвода отделенного слоя и механизм для смотки шпагата, средство для удержания и вращения рулона выполнено в виде двух кинематически связанных между собой цилиндрических барабанов, между которыми размещен поддерживающий поддон, при этом...
Транспортер сено-соломистых рулонов
Номер патента: 1825
Опубликовано: 30.12.1997
Авторы: Назаров Сергей Иванович, Тишкевич Казимир Ильич, Елисеев Виктор Николаевич, Синкевич Петр Николаевич, Камлюк Александр Константинович
МПК: A01D 87/12
Метки: транспортер, рулонов, сено-соломистых
Текст:
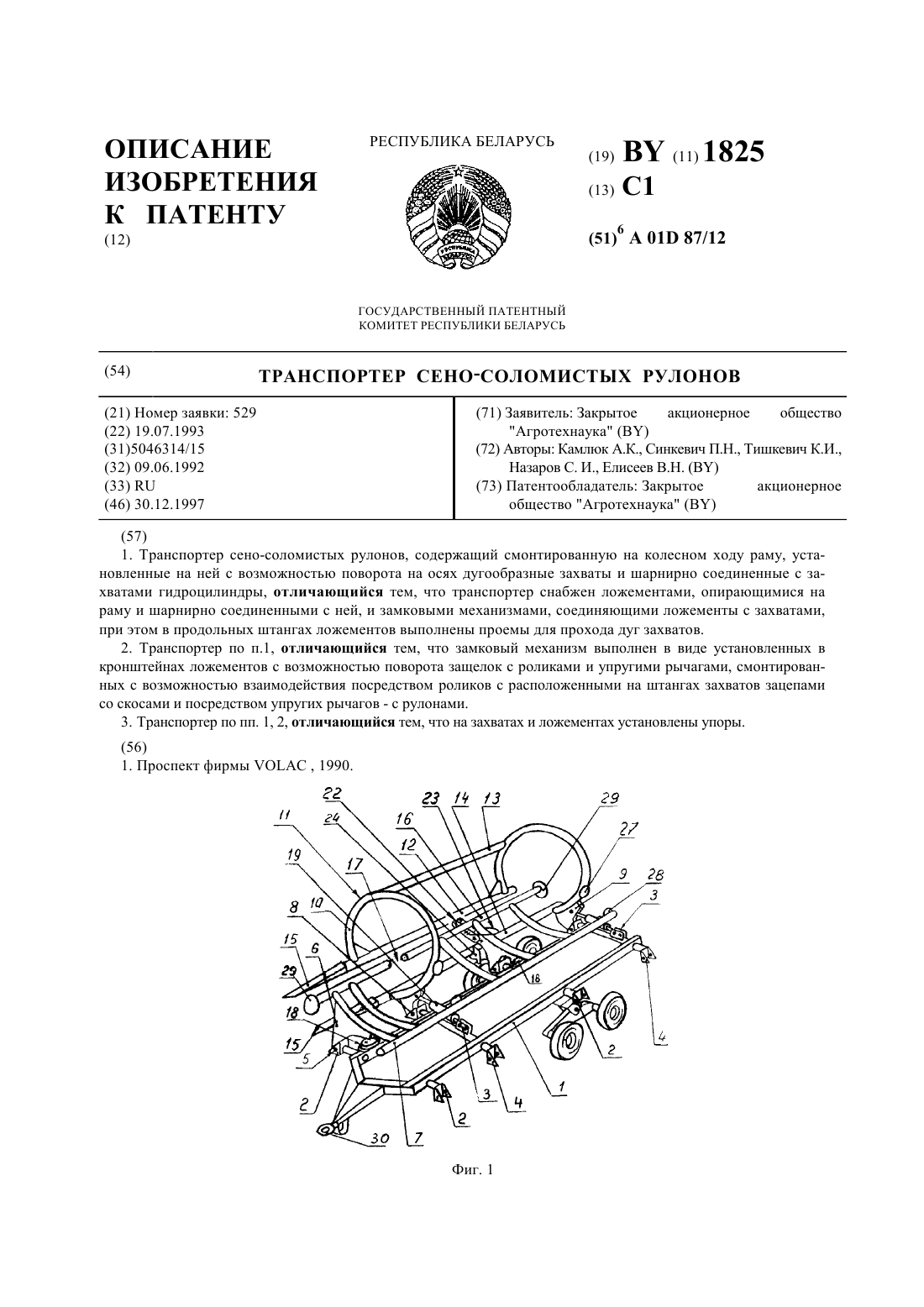
...7. Замковый механизм выполнен в виде установленных в кронштейнах 6 ложементов 7 с возможностью поворота на осях 20 защелок 21, с роликами 22 и упругими рычагами 23, смонтированных с возможностью взаимодействия посредством роликов 22 с расположенными на штангах 14 захватов 10 зацепами 24 со скосами 25 и посредством упругих рычагов 23 с рулонами 26. Захваты 10 снабжены упорами 27, а ложементы 7 - упорами 28. В исходном негруженом...
Предыдущий патент: Улей для содержания пчел
Следующий патент: Трехфазное устройство для компенсации реактивной мощности
Случайный патент: Фрикционный диск