Устройство определения величины буксования движителей мобильных машин
Номер патента: U 4737
Опубликовано: 30.10.2008
Авторы: Басалаев Владимир Николаевич, Альгин Владимир Борисович, Успенский Алексей Александрович, Михайлов Валерий Валерианович

Текст
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ БУКСОВАНИЯ ДВИЖИТЕЛЕЙ МОБИЛЬНЫХ МАШИН(71) Заявитель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(72) Авторы Басалаев Владимир Николаевич Михайлов Валерий Валерианович Альгин Владимир Борисович Успенский Алексей Александрович(73) Патентообладатель Государственное научное учреждение Объединенный институт машиностроения Национальной академии наук Беларуси(57) Устройство определения величины буксования движителей мобильных машин, содержащее датчик действительной скорости, датчик теоретической скорости и связанный с ними модуль сравнения, отличающееся тем, что модуль сравнения выполнен на базе микропроцессора и содержит соединенные между собой блок сравнения, связанный с датчиком теоретической скорости, и блок интегрирования, связанный с датчиком продольного ускорения, при этом в качестве датчика действительной скорости используются блок интегрирования и датчик продольного ускорения.(56) 1. ГОСТ 30745-2001 (ИСО 789-9-90). Тракторы сельскохозяйственные. Определение тяговых показателей. 2. Ксеневич И.П. Современные проблемы прикладной механики наземных тяговотранспортных машин // Приводная техника. Ч. 4. - 2002. -4. - С. 30-32. 3. Заявка РФ 95107422/11, 1997. 47372008.10.30 4. Гришкевич А.И. Автомобили Теория Учебник для вузов. - Мн. Вышэйшая школа,1986. - С. 12. Полезная модель относится к области машиностроения и может быть использована в испытательной технике для определения буксования движителей. В настоящее время величина буксования согласно ГОСТ 30745-2001 движителей сельскохозяйственных тракторов различных тяговых классов и их модификаций определяется на участке одной длины гона путем замера количества оборотов (частоты вращения)небуксующего колеса и оборотовбуксующего колеса, вызываемого приложением крюковой нагрузки 1. Величину буксованиядля колесного движителя рассчитывают по формуле Если выразить буксование через непрерывно изменяющиеся величины теоретической(пропорционально количеству оборотов небуксующего колеса без нагрузки) и действительной скоростей(пропорционально количеству оборотов буксующего колеса с нагрузкой), то выражение для буксования можно представить как переменную величину 2. Известна конструкция устройства для определения величины буксования движителя 2. Устройство включает датчик действительной скорости, выполненный в виде радара,датчик теоретической скорости, базовым сигналом которого является величина угловой скорости привода, и электронный блок управления. Сигналы обоих датчиков поступают на линейные входы блока управления, где впоследствии обрабатываются для последующего принятия решения по управлению. Положительным качеством данного устройства является то, что оно позволяет устанавливать величину буксования движителей даже при наличии отбора мощности вала отбора мощности (ВОМ). Недостатками такого устройства являются его высокая сложность и сравнительно невысокие точность и быстродействие из-за применения технологии сканирования поверхности, которая в большинстве случаев эксплуатации сельскохозяйственных машин является неоднородной как по своим физическим (отражающим) свойствам, так и по форме наружной поверхности. Наиболее близким по технической сущности к заявляемому объекту является устройство для определения буксования мобильных машин 3. Устройство содержит неподвижную опору, к которой посредством тросов с датчиком продольной силы крепится трактор. За трактором на специальной тележке смонтирован модуль сравнения, выполненный в виде редуктора. Входной вал редуктора связан с датчиком теоретической скорости, которым является вал отбора мощности трактора. Выходной вал редуктора является датчиком действительной скорости, поскольку несет шкив со счетчиком оборотов распускаемого троса. Один конец этого троса навит и закреплен на шкиве, а другой закреплен на опоре. 47372008.10.30 Буксование колес формируется крюковой нагрузкой остова трактора (растяжение троса и усилие на неподвижной опоре) через вращающийся вал отбора мощности и создаваемый момент на ведущих колесах. Основным назначением модуля сравнения является обработка сигналов датчиков теоретической и действительной скоростей во времени через определенные его промежутки для последующего их сопоставления с показаниями датчика продольной силы. К недостаткам данного устройства следует отнести обязательное наличие у трактора механизма вала отбора мощности устройство создает переменное возрастающее тяговое сопротивление, ограниченное кинематикой элементов редуктора и трансмиссии отсутствует возможность замера буксований в полевых условиях. Задачей полезной модели является расширение функциональных возможностей устройства. Поставленная задача решается тем, что в устройстве определения величины буксования движителей мобильных машин, содержащем датчик действительной скорости, датчик теоретической скорости и связанный с ними модуль сравнения, согласно техническому решению, модуль сравнения выполнен на базе микропроцессора и содержит соединенные между собой блок сравнения, связанный с датчиком теоретической скорости, и блок интегрирования, связанный с датчиком продольного ускорения, при этом датчиком действительной скорости служат блок интегрирования и датчик продольного ускорения. Использование в качестве датчика действительной скорости блока интегрирования совместно с подключенным к нему датчиком продольного ускорения, а также выполнение модуля сравнения состоящим из двух блоков и на базе микропроцессора, позволяет расширить функциональные возможности устройства и определить величину буксования вне зависимости от условий движения машины. На чертеже представлена предлагаемая схема устройства. Устройство содержит датчик действительной скорости 1, датчик теоретической скорости, выполненный на основе датчика угловой скорости 2 ведущего колеса машины, и связанный с ними модуль сравнения 3, который осуществляет обработку сигнала во времени с некоторым заданным интервалом. Модуль сравнения 3 выполнен на базе микропроцессора и содержит блок интегрирования 4 и блок сравнения 5. Выход блока интегрирования 4 связан с входом блока сравнения 5 линией связи 6. Датчик действительной скорости 1 включает блок интегрирования 4, к входу которого подключен датчик продольного ускорения машины 7. Микропроцессорный блок интегрирования 4 предназначен для приема сигнала от датчика продольного ускорения 7, обработки и подачи сигнала о величине действительной скорости на блок сравнения 5 через заданный промежуток времени. Микропроцессорный блок сравнения 5 предназначен для приема сигнала о действительной скорости от блока интеграции 4 по линии 6, приема сигнала от датчика 2 теоретической скорости и их сравнения по заданному алгоритму в текущий момент времени. Устройство работает следующим образом. При движении мобильной машины информация от датчика продольного ускорения 7 поступает на вход блока интегрирования 4 модуля сравнения 3. Блок интегрирования 4 обрабатывает этот сигнал и определяет действительную скоростьпо выражению(-),где (-) - действительная скорость трактора, установленная в предыдущем шаге отсчета в момент времени (-)- ускорение корпуса трактора в момент времени- временной интервал между замерами. 47372008.10.30 В дальнейшем значения действительной скоростипо линии 6 поступают на блок сравнения 5. Информация от датчика теоретической скорости 2 (например, измеряется частота вращения ведущего колеса) поступает на вход блока сравнения 5 модуля сравнения 3. При этом поступательная теоретическая скоростьвсегда пропорциональна угловой(например, ведущего колеса) и отличается на величину радиуса качения колеса 4- угловая скорость, определенная показаниями датчика какого-либо вращающегося элемента трансмиссии, приведенная к ведущему колесу мобильной машины в момент времени- радиус качения ведущего колеса. Одновременно блок сравнения 5 производит обработку полученной информации и вычисляет величину буксования в соответствии с выражением. Таким образом, предлагаемое устройство позволяет упростить процедуру определения величины буксования, повысить быстродействие устройства и расширить его функциональные возможности. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 4
МПК / Метки
МПК: B60R 16/02, G01M 17/00
Метки: машин, буксования, мобильных, определения, величины, устройство, движителей
Код ссылки
<a href="https://by.patents.su/4-u4737-ustrojjstvo-opredeleniya-velichiny-buksovaniya-dvizhitelejj-mobilnyh-mashin.html" rel="bookmark" title="База патентов Беларуси">Устройство определения величины буксования движителей мобильных машин</a>
Устройство определения величины задержки последовательности квадратичных вычетов
Номер патента: U 2280
Опубликовано: 30.12.2005
Авторы: Басалай Роман Николаевич, Мальцев Сергей Васильевич
МПК: G06F 5/01
Метки: величины, квадратичных, определения, последовательности, задержки, вычетов, устройство
Текст:
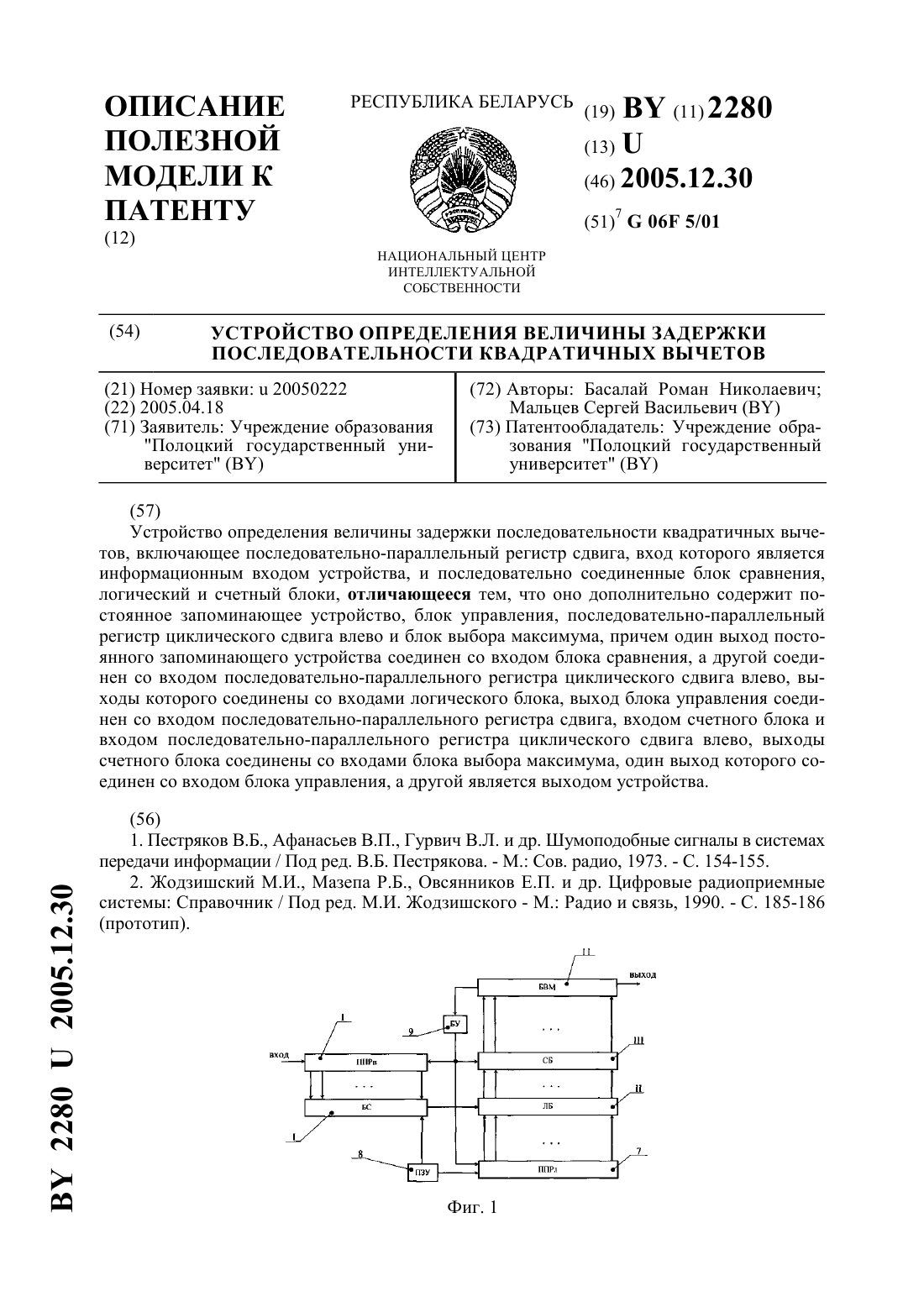
...управления БУ 9 и одновременно со счетными входами (управляемыми передним фронтом сигнала) реверсивных счетчиков 10 1, 2, РС 3,РСр и управляющим входом (управляемым передним фронтом сигнала) входного последовательно-параллельного регистра 1 циклического сдвига вправо ППРп. Выходы управляемых инверторов 6 УИ 1, УИ 2, УИ 3,УИр соединены с управляющими входами реверсивных счетчиков 10 1, 2, РС 3,РСр соответственно. Выходы реверсивных счетчиков...
Система для телеметрического контроля мобильных машин
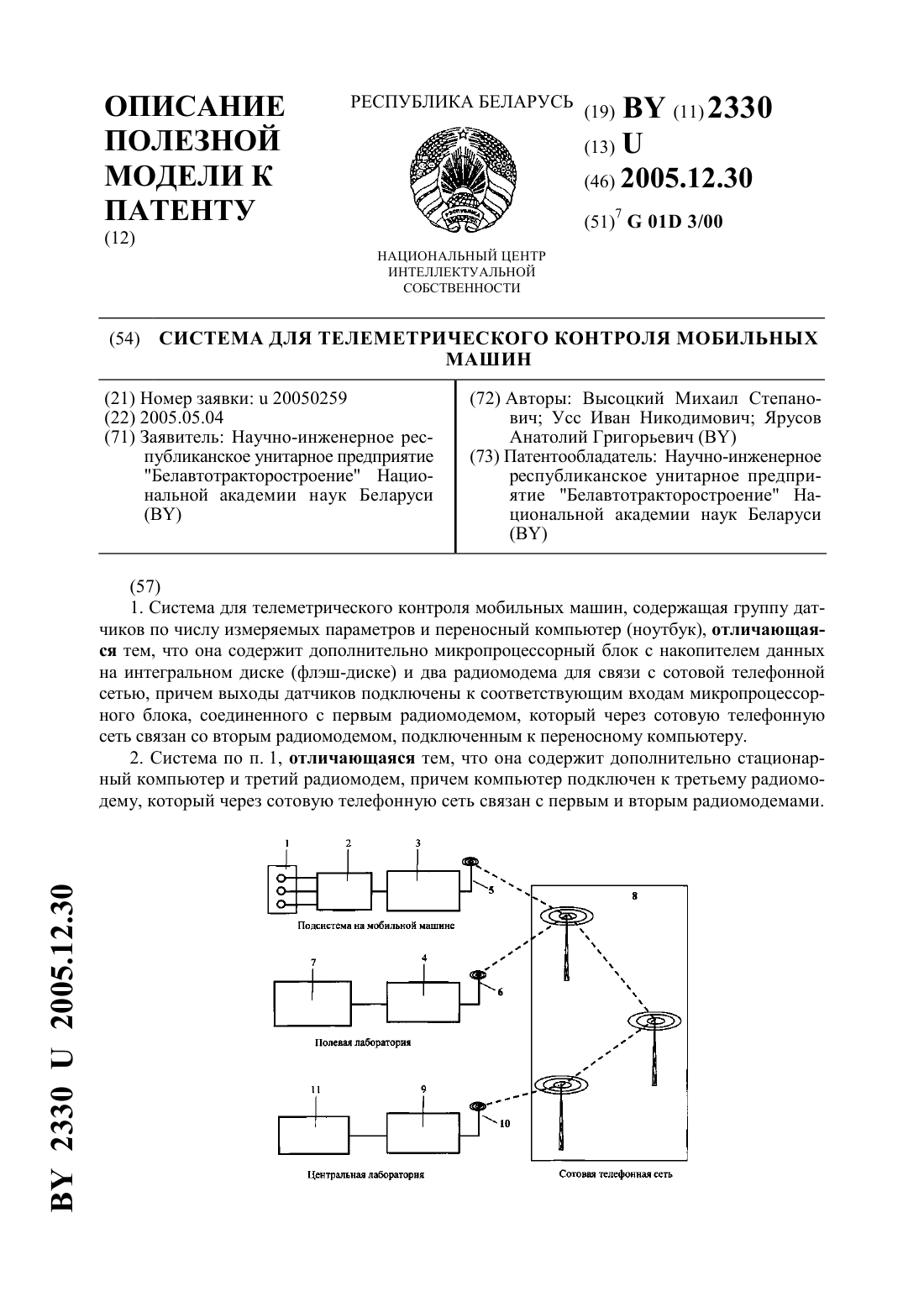
Номер патента: U 2330
Опубликовано: 30.12.2005
Авторы: Ярусов Анатолий Григорьевич, Усс Иван Никодимович, Высоцкий Михаил Степанович
МПК: G01D 3/00
Метки: машин, мобильных, система, контроля, телеметрического
Текст:
...данных на интегральном диске и радиомодем. Эти устройства выдерживают интенсивные вибрации. Остальные компоненты системы, не предназначенные для эксплуатации в условиях вибраций, размещаются в полевой и центральной лабораториях. Полевая лаборатория может размещаться в стационарном строении или в автомобиле, который во время испытаний стоит неподвижно,на расстоянии прямой видимости от движущейся испытываемой машины. Полевая и центральная...
Гравитационно-механический сводообрушитель плохосыпучих материалов для мобильных сельскохозяйственных машин
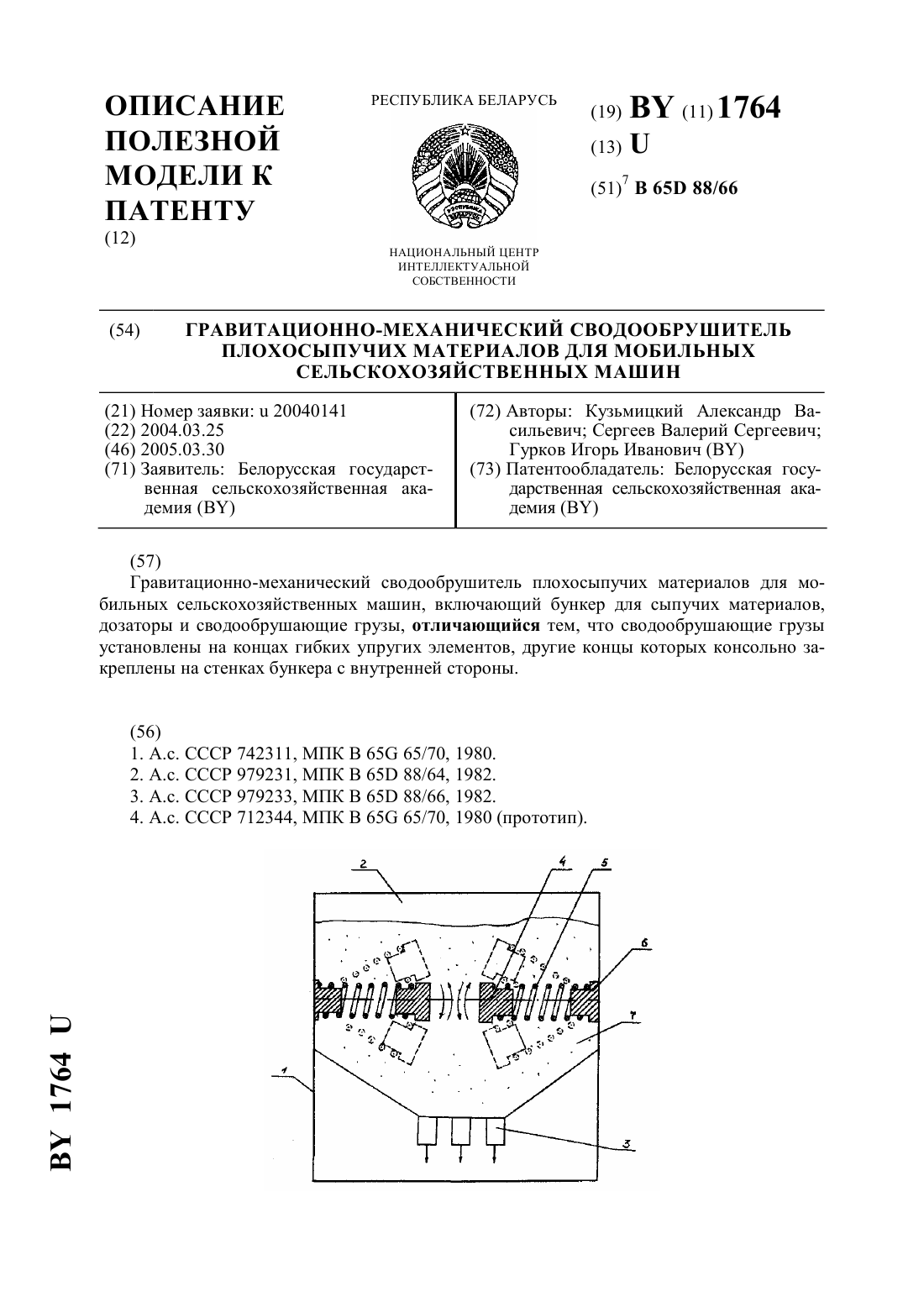
Номер патента: U 1764
Опубликовано: 30.03.2005
Авторы: Кузьмицкий Александр Васильевич, Сергеев Валерий Сергеевич, Гурков Игорь Иванович
МПК: B65D 88/66
Метки: сводообрушитель, мобильных, гравитационно-механический, материалов, плохосыпучих, сельскохозяйственных, машин
Текст:
...для использования в стационарных установках с большим объемом бункера, поэтому наличие активного привода в данном случае вполне обосновано. Однако для мобильных машин с относительно небольшим объемом бункера появляется возможность упростить конструкцию, исключив электромеханический привод. Задачей заявляемой полезной модели является снижение энергозатрат на сводообрушение. Решение поставленной задачи достигается тем, что для сводообрушения...
Устройство для определения остроты зрения в зависимости от величины освещенности
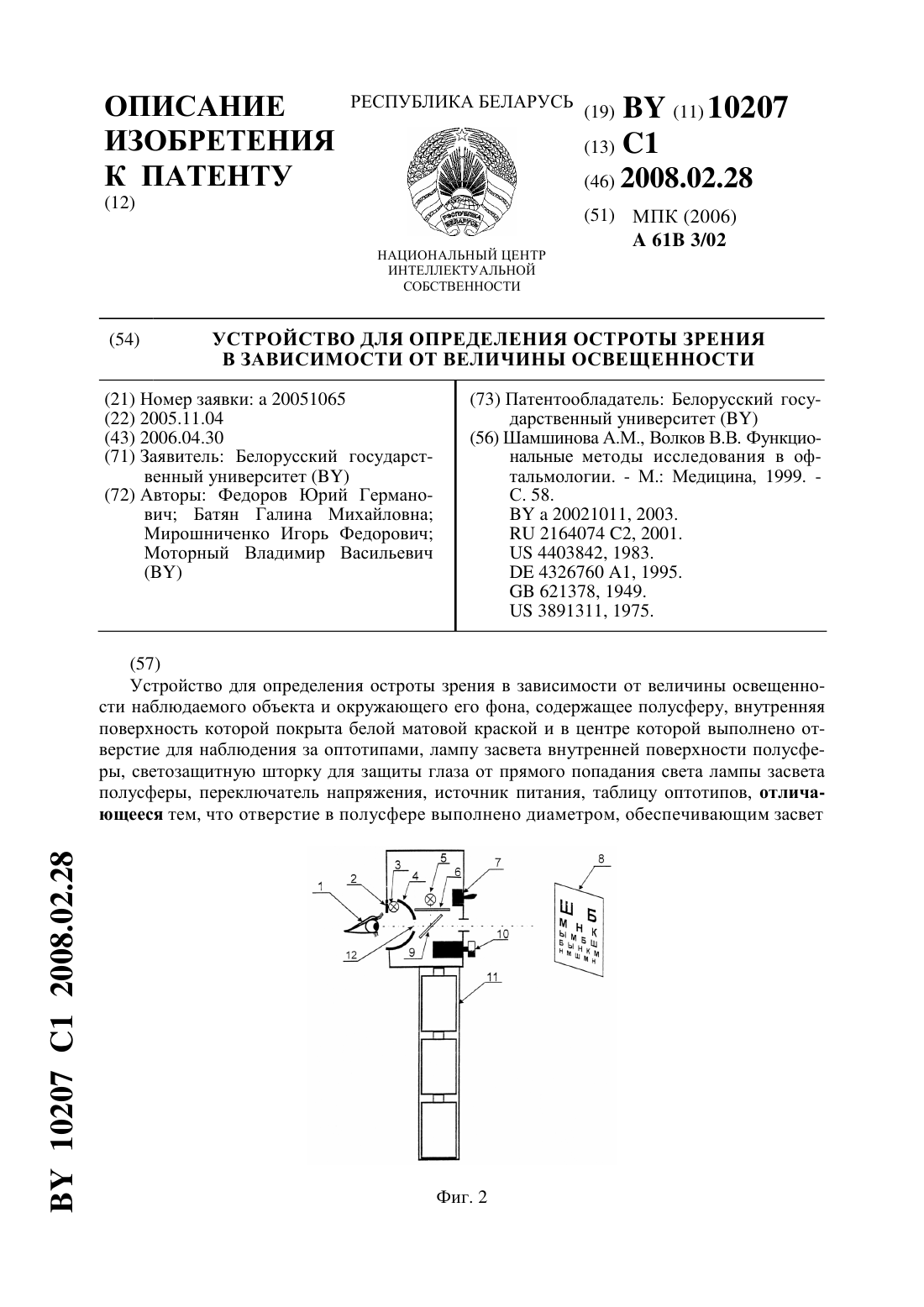
Номер патента: 10207
Опубликовано: 28.02.2008
Авторы: Федоров Юрий Германович, Моторный Владимир Васильевич, Мирошниченко Игорь Федорович, Батян Галина Михайловна
МПК: A61B 3/02
Метки: величины, остроты, освещенности, определения, зрения, устройство, зависимости
Текст:
...должно быть уменьшено с 12 мм до 5 мм. Для обеспечения засвета фовеолы непосредственно за отверстием в полусфере устанавливается полупрозрачное зеркало, через которое испытуемый видит демонстрируемые оптотипы. На это зеркало направляется световой поток от маломощной лампочки, расположенной на внешней стороне полусферы таким образом, чтобы свет, отраженный от полупрозрачного зеркала, падал через отверстие полусферы на глаз испытуемого. Это...
Устройство для определения сдвига ветра

Номер патента: U 3444
Опубликовано: 30.04.2007
Автор: ТЯППО АЛЕКСАНДР ЕВГЕНЬЕВИЧ
МПК: G01C 21/00
Метки: определения, сдвига, ветра, устройство
Текст:
...датчиком ускорений по осии блоком расчета поправки в ускорение по оси , которое вызвано виражом воздушного судна, при этом выход блока расчета поправки соединен с входом блока вычисления ускорений, а вход блока расчета поправки соединен с датчиком ускорений по осии с указателем крена воздушного судна. Для лучшего понимания устройство поясняется чертежом, где фиг. 1 - общий вид блок схемы устройства фиг. 2 - дифференциальная блок схема...
Предыдущий патент: Устройство для нанесения покрытий из металлических порошков
Следующий патент: Стабилограф
Случайный патент: Способ формирования намагничивающих импульсов