Адаптивный имитатор загрузки на рычагах управления авиационного тренажера
Текст
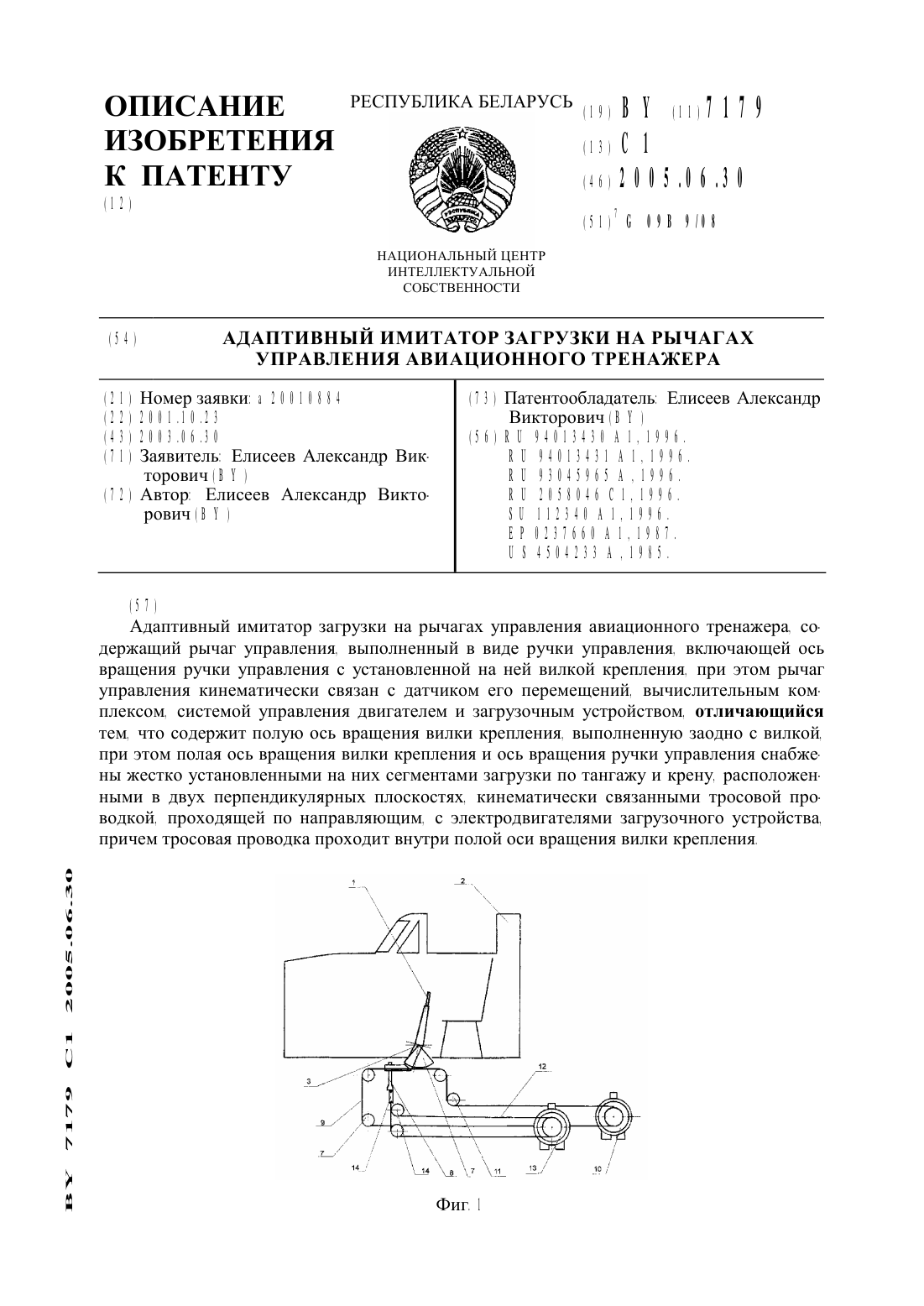
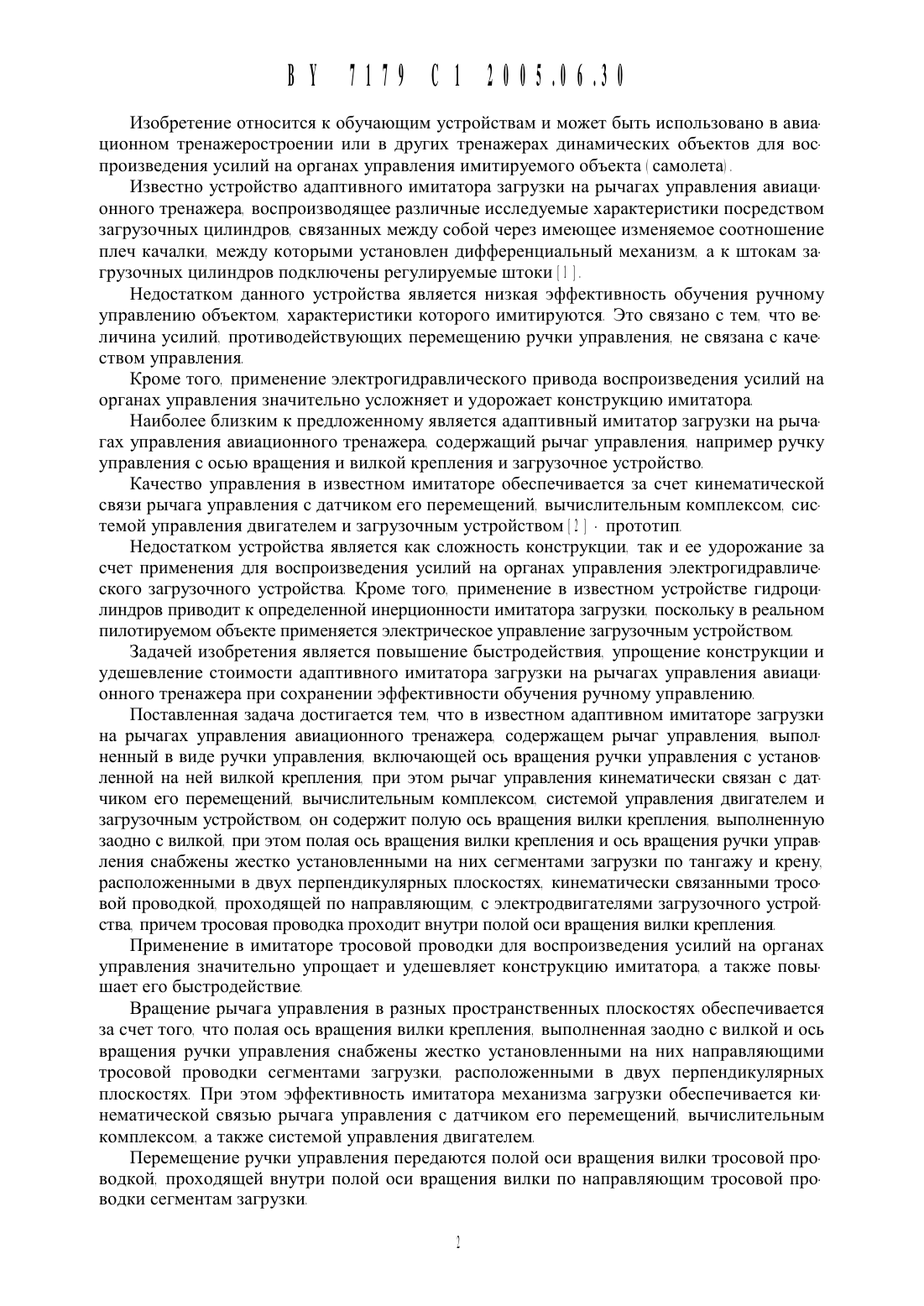
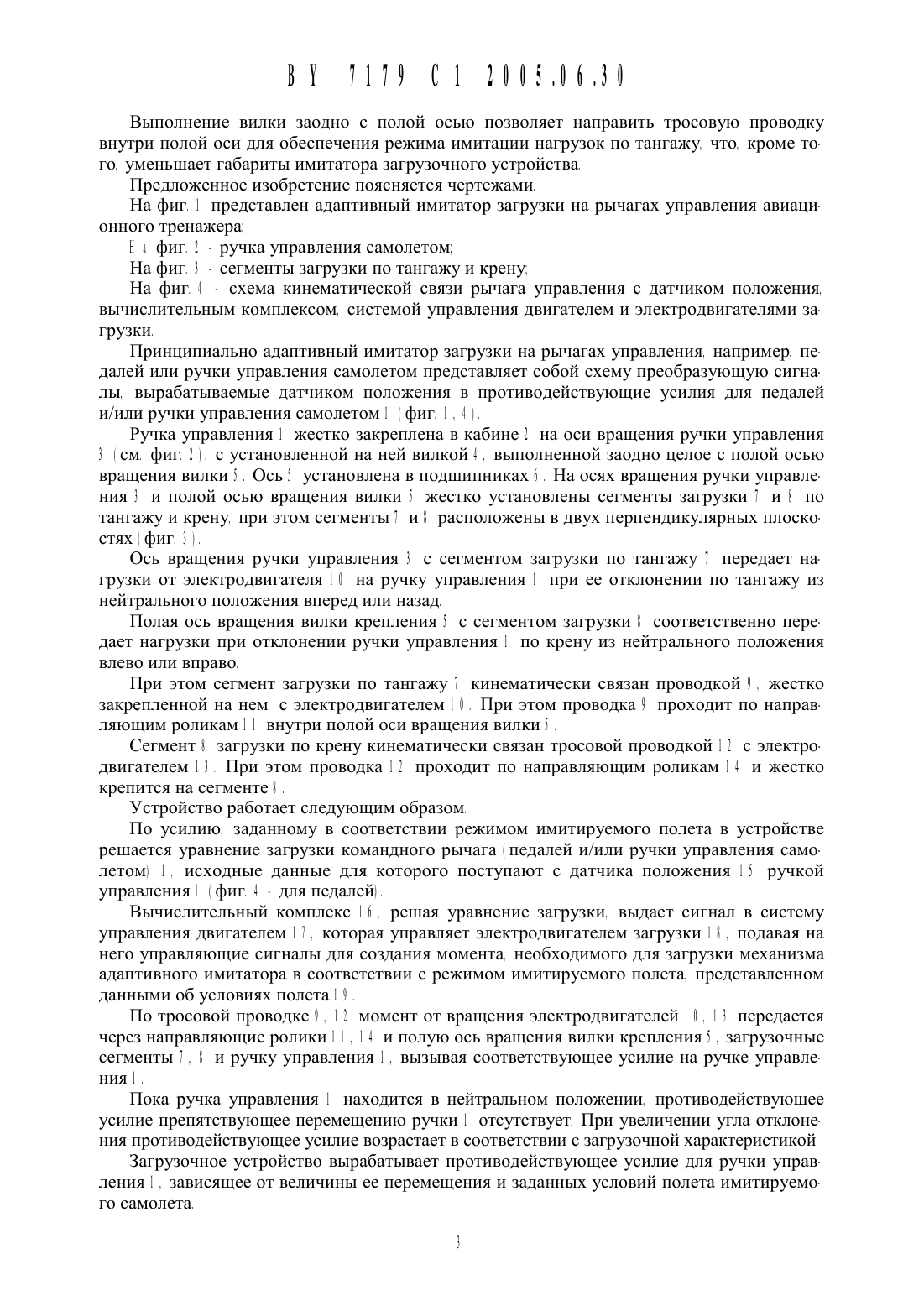
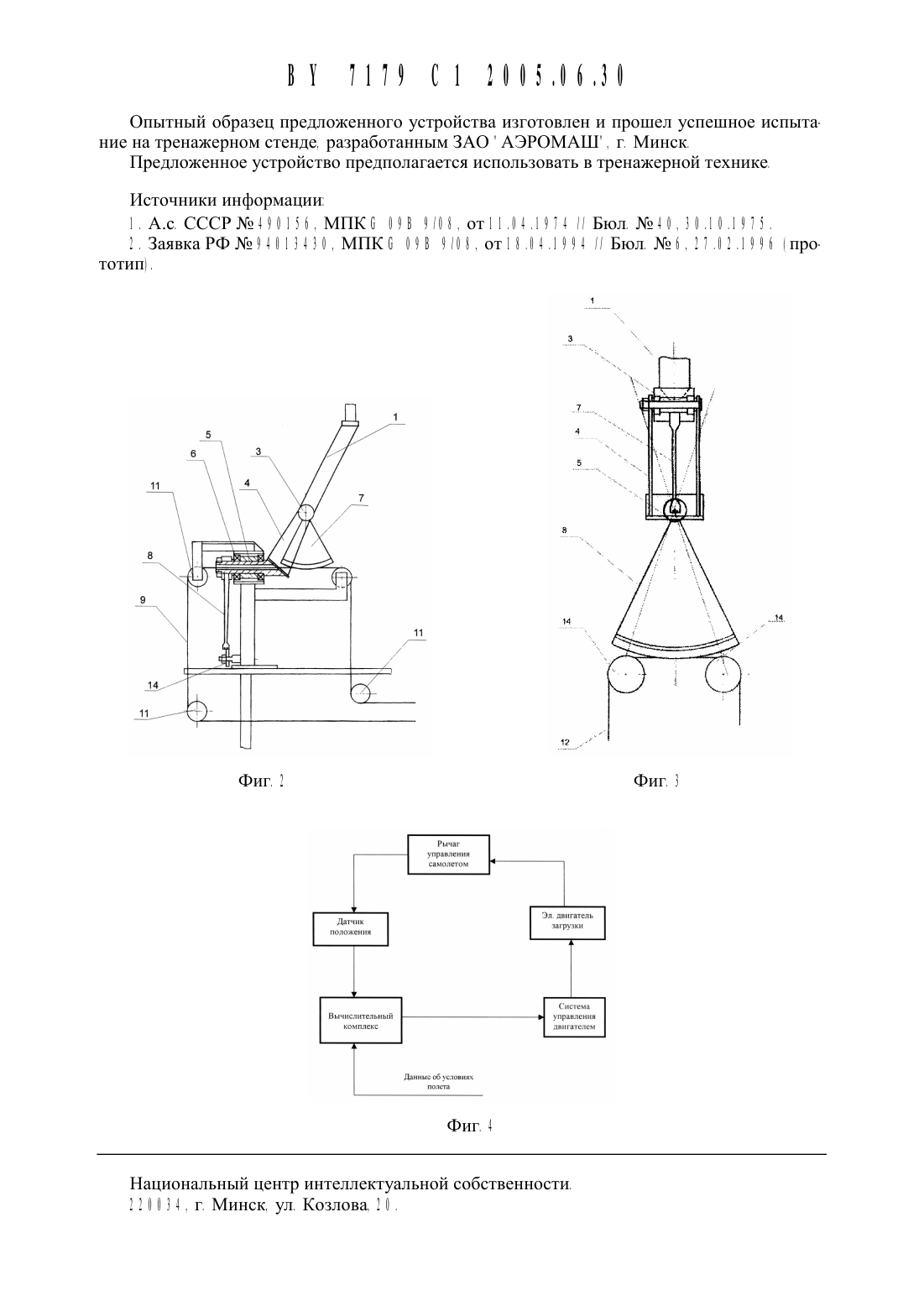
НАЦИОНАЛЬНЫЙ ЦЕНтР ИНТЕЛЛЕКТУАЛЬНОИ СОБСТВЕННОСТИ00 0 0 АДАПТИВНЫЙ ИМИТАТОР ЗАГРУЗКИ НА РЫЧАГАХ00 0 0 Заявитель Елисеев Александр Викторович 0 В 0 000 20 Автор Елисеев Александр Викторович 00 0 0Адаптивный имитатор загрузки на рычагах управления авиационного тренажера. содержащий рычаг управления. выполненный в виде ручки управления. включающей ось вращения ручки управления с установленной на ней вилкой крепления. при этом рычаг управления кинематически связан с датчиком его перемещений. вычислительным комплексом. системой управления двигателем и загрузочным устройством. отличающийся тем. что содержит полую ось вращения вилки крепления. выполненную заодно с вилкой. при этом полая ось вращения вилки крепления и ось вращения ручки управления снабжены жестко установленными на них сегментами загрузки по тангажу и крену. расположенными в двух перпендикулярных плоскостях. кинематически связанными тросовой проводкой. проходящей по направляющим. с электродвигателями загрузочного устройства. причем тросовая проводка проходит внутри полой оси вращения вилки крепленияИзобретение относится К обучающим устройствам И может быть использовано в авиационном тренажеростроении или в других тренажерах динамических объектов для воспроизведения усилий на органах управления имитируемого объекта самолета)Известно устройство адаптивного имитатора загрузки на рычагах управления авиационного тренажера воспроизводящее различные исследуемые характеристики посредством загрузочных цилиндров. связанных между собой через имеющее изменяемое соотнощение плеч качалки. между которыми установлен дифференциальный механизм. а к щтокам загрузочных цилиндров подключены регулируемые щтоки 1 1 .Недостатком данного устройства является низкая эффективность обучения ручному управлению объектом. характеристики которого имитируются Это связано с тем. что величина усилий. противодействующих перемещению ручки управления. не связана с качеством управления.Кроме того. применение электрогидравлического привода воспроизведения усилий на органах управления значительно усложняет и удорожает конструкцию имитатора.Наиболее близким к предложенному является адаптивный имитатор загрузки на рь 1 чагах управления авиационного тренажера содержащий рычаг управления. например ручку управления с осью вращения и вилкой крепления и загрузочное устройствоКачество управления в известном имитаторе обеспечивается за счет кинематической связи рычага управления с датчиком его перемещений. вычислительным комплексом. системой управления двигателем и загрузочным устройством 1 - прототипНедостатком устройства является как сложность конструкции. так и ее удорожание за счет применения для воспроизведения усилий на органах управления электрогидравлического загрузочного устройства. Кроме того. применение в известном устройстве гидроцилиндров приводит к определенной инерционности имитатора загрузки. поскольку в реальном пилотируемом объекте применяется электрическое управление загрузочным устройством.Задачей изобретения является повыщение быстродействия. упрощение конструкции и удешевление стоимости адаптивного имитатора загрузки на рычагах управления авиационного тренажера при сохранении эффективности обучения ручному управлениюПоставленная задача достигается тем. что в известном адаптивном имитаторе загрузки на рычагах управления авиационного тренажера. содержащем рычаг управления. вь 1 полненный в виде ручки управления. включающей ось вращения ручки управления с установленной на ней вилкой крепления. при этом рычаг управления кинематически связан с датчиком его перемещений. вычислительным комплексом. системой управления двигателем и загрузочным устройством. он содержит полую ось вращения вилки крепления. выполненную заодно с вилкой. при этом полая ось вращения вилки крепления и ось вращения ручки управления снабжены жестко установленными на них сегментами загрузки по тангажу и крену. расположенными в двух перпендикулярных плоскостях. кинематически связанными тросовой проводкой. проходящей по направляющим. с электродвигателями загрузочного устройства причем тросовая проводка проходит внутри полой оси вращения вилки крепления.Применение в имитаторе тросовой проводки для воспроизведения усилий на органах управления значительно упрощает и удещевляет конструкцию имитатора а также повь 1 щает его быстродействие.Вращение рычага управления в разных пространственных плоскостях обеспечивается за счет того. что полая ось вращения вилки крепления. выполненная заодно с вилкой и ось вращения ручки управления снабжены жестко установленными на них направляющими тросовой проводки сегментами загрузки. расположенными в двух перпендикулярных плоскостях. При этом эффективность имитатора механизма загрузки обеспечивается кинематической связью рычага управления с датчиком его перемещений. вычислительным комплексом. а также системой управления двигателем.Перемещение ручки управления передаются полой оси вращения вилки тросовой проводкой. проходящей внутри полой оси вращения вилки по направляющим тросовой проводки сегментам загрузки.Выполнение вилки заодно с полой осью позволяет направить тросовую проводку внутри полой оси для обеспечения режима имитации нагрузок по тангажу. что. кроме того. уменьшает габариты имитатора загрузочного устройстваПредложенное изобретение поясняется чертежамиНа фиг. 7 представлен адаптивный имитатор загрузки на рычагах управления авиационного тренажераНа фиг. 7 - сегменты загрузки по тангажу и кренуНа фиг. 9 - схема кинематической связи рычага управления с датчиком положения. вычислительным комплексом. системой управления двигателем и электродвигателями загрузки.Принципиально адаптивный имитатор загрузки на рычагах управления. например. педалей или ручки управления самолетом представляет собой схему преобразующую сигналы. вырабатываемые датчиком положения в противодействующие усилия для педалей и/или ручки управления самолетом 7 фиг 7 . 9 )Ручка управления 7 жестко закреплена в кабине 2 на оси вращения ручки управления 7 7 см. фиг 2 7. с установленной на ней вилкой 7 . выполненной заодно целое с полой осью вращения вилки 5 . Ось 5 установлена в подщипниках 6 . На осях вращения ручки управления 7 и полой осью вращения вилки 5 жестко установлены сегменты загрузки 7 и 7 по тангажу и крену. при этом сегменты 7 и 7 расположены в двух перпендикулярных плоскостях 7 фиг 7 72Ось вращения ручки управления 7 с сегментом загрузки по тангажу 7 передает нагрузки от электродвигателя 7 7 на ручку управления 7 при ее отклонении по тангажу из нейтрального положения вперед или назад.Полая ось вращения вилки крепления 5 с сегментом загрузки 7 соответственно передает нагрузки при отклонении ручки управления 7 по крену из нейтрального положения влево или вправо.При этом сегмент загрузки по тангажу 7 кинематически связан проводкой 9 . жестко закрепленной на нем. с электродвигателем 7 7 . При этом проводка 9 проходит по направляющим роликам 7 7 внутри полой оси вращения вилки 5 .Сегмент 7 загрузки по крену кинематически связан тросовой проводкой 7 2 с электродвигателем 7 7 . При этом проводка 7 2 проходит по направляющим роликам 7 9 и жестко крепится на сегменте 7 .Устройство работает следующим образом.По усилию. заданному в соответствии режимом имитируемого полета в устройстве рещается уравнение загрузки командного рычага педалей и/или ручки управления самолетом) 7. исходные данные для которого поступают с датчика положения 75 ручкой управления 7 фиг 9 - для педалей).Вычислительный комплекс 7 7. рещая уравнение загрузки. выдает сигнал в систему управления двигателем 7 7 . которая управляет электродвигателем загрузки 7 7 . подавая на него управляющие сигналы для создания момента. необходимого для загрузки механизма адаптивного имитатора в соответствии с режимом имитируемого полета. представленном данными об условиях полета 7 9 .По тросовой проводке 9 . 7 2 момент от вращения электродвигателей 7 7 . 7 7 передается через направляющие ролики 7 7 . 7 9 и полую ось вращения вилки крепления 5 . загрузочные сегменты 7 . 7 и ручку управления 7 . вызывая соответствующее усилие на ручке управления 7 .Пока ручка управления 7 находится в нейтральном положении. противодействующее усилие препятствующее перемещению ручки 7 отсутствует. При увеличении угла отклонения противодействующее усилие возрастает в соответствии с загрузочной характеристикойЗагрузочное устройство вырабатывает противодействующее усилие для ручки управления 7 . зависящее от величины ее перемещения и заданных условий полета имитируемого самолетаОпытный образец предложенного устройства Изготовлен И прошел успешное испЬ 1 тание на тренажерном стенде. разработанным ЗАО АЭРОМАШ . г. Минск. Предложенное устройство предполагается Использовать в тренажерной технике.Л Эл двигатель агчщ загружк положенияНациональный центр Интеллектуальной собственности. 2 2 0 0 3 4 . г. Минск. ул. Козлова. 2 0 .
МПК / Метки
МПК: G09B 9/08
Метки: адаптивный, управления, загрузки, имитатор, авиационного, рычагах, тренажера
Код ссылки
<a href="https://by.patents.su/4-7179-adaptivnyjj-imitator-zagruzki-na-rychagah-upravleniya-aviacionnogo-trenazhera.html" rel="bookmark" title="База патентов Беларуси">Адаптивный имитатор загрузки на рычагах управления авиационного тренажера</a>
Имитатор опухолевых антигенов
Номер патента: 5942
Опубликовано: 30.03.2004
Авторы: Янченко Андрей Вилиянинович, Янченко Владимир Вилиянинович, Янченко Лилия Кирилловна
МПК: A61K 38/16, A61K 39/00, A61P 35/00...
Метки: антигенов, имитатор, опухолевых
Текст:
...и лечения онкологических заболеваний. Для этого имитатор опухолевых антигенов вводят в организм любым способом, за исключением внутривенного. Способность имитатора опухолевых антигенов включать противоопухолевый иммунитет подтверждают результаты испытаний, проведенные на 577 животных, часть сведений о которых представлены в описании экспериментов и на фиг.1-7 (чертежи). Определение летальной дозыимитатора опухолевых антигенов...
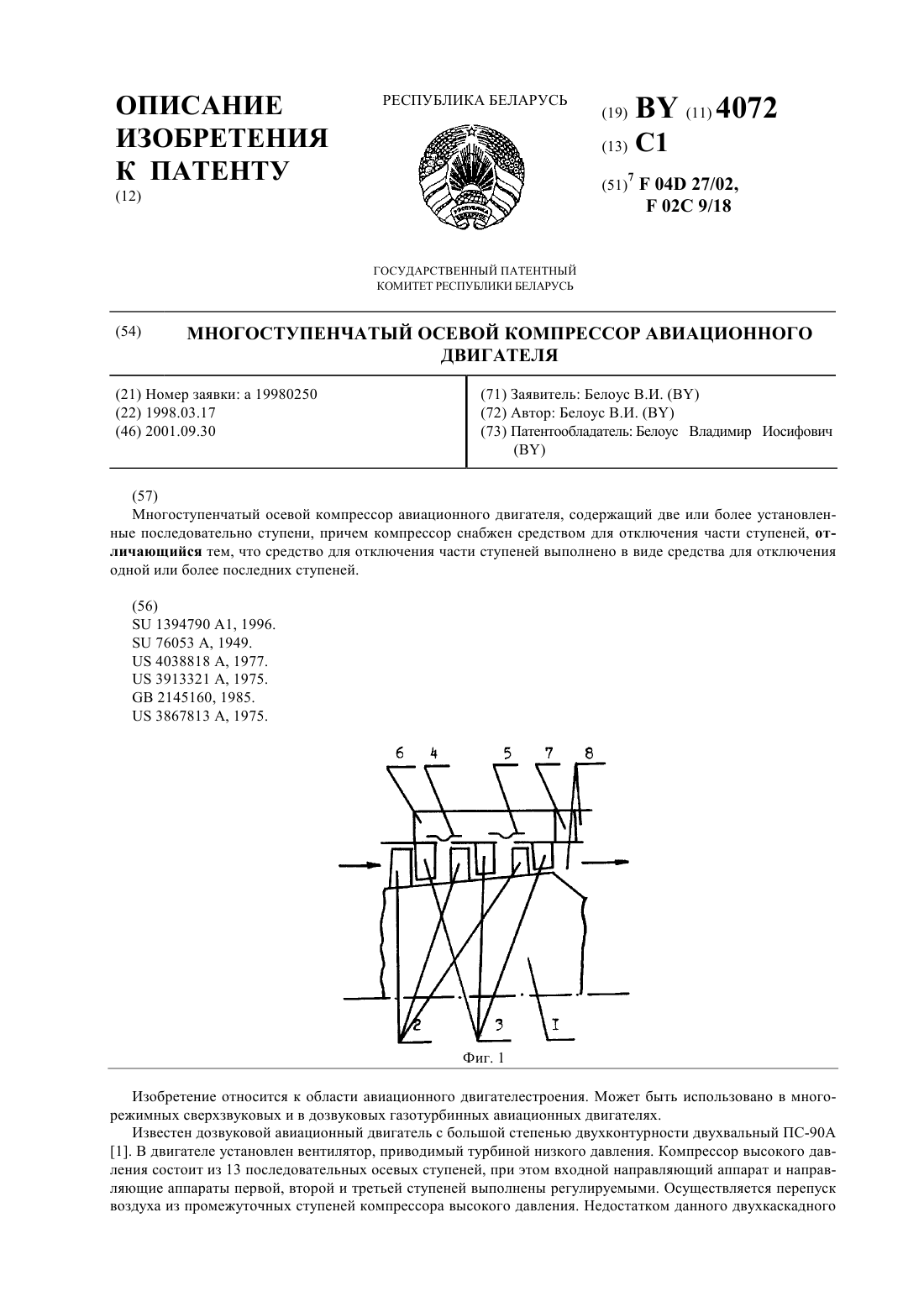
Многоступенчатый осевой компрессор авиационного двигателя
Номер патента: 4072
Опубликовано: 30.09.2001
Автор: Белоус Владимир Иосифович
МПК: F04D 27/02, F02C 9/18
Метки: многоступенчатый, двигателя, компрессор, авиационного, осевой
Текст:
...перепуска в этих клапанах закрываются заслонками, управляемыми гидроцилиндрами. Устройства перепуска воздуха 4 и 5 являются средством для отключения двух последних ступеней в компрессоре. Компрессор соединен валом с турбиной. Двигатель имеет регулируемое сопло, оборудован системой автоматического управления. С целью упрощения запуска раскрутку ротора 1 двигателя целесообразно начинать с отключенными последними ступенями. После...
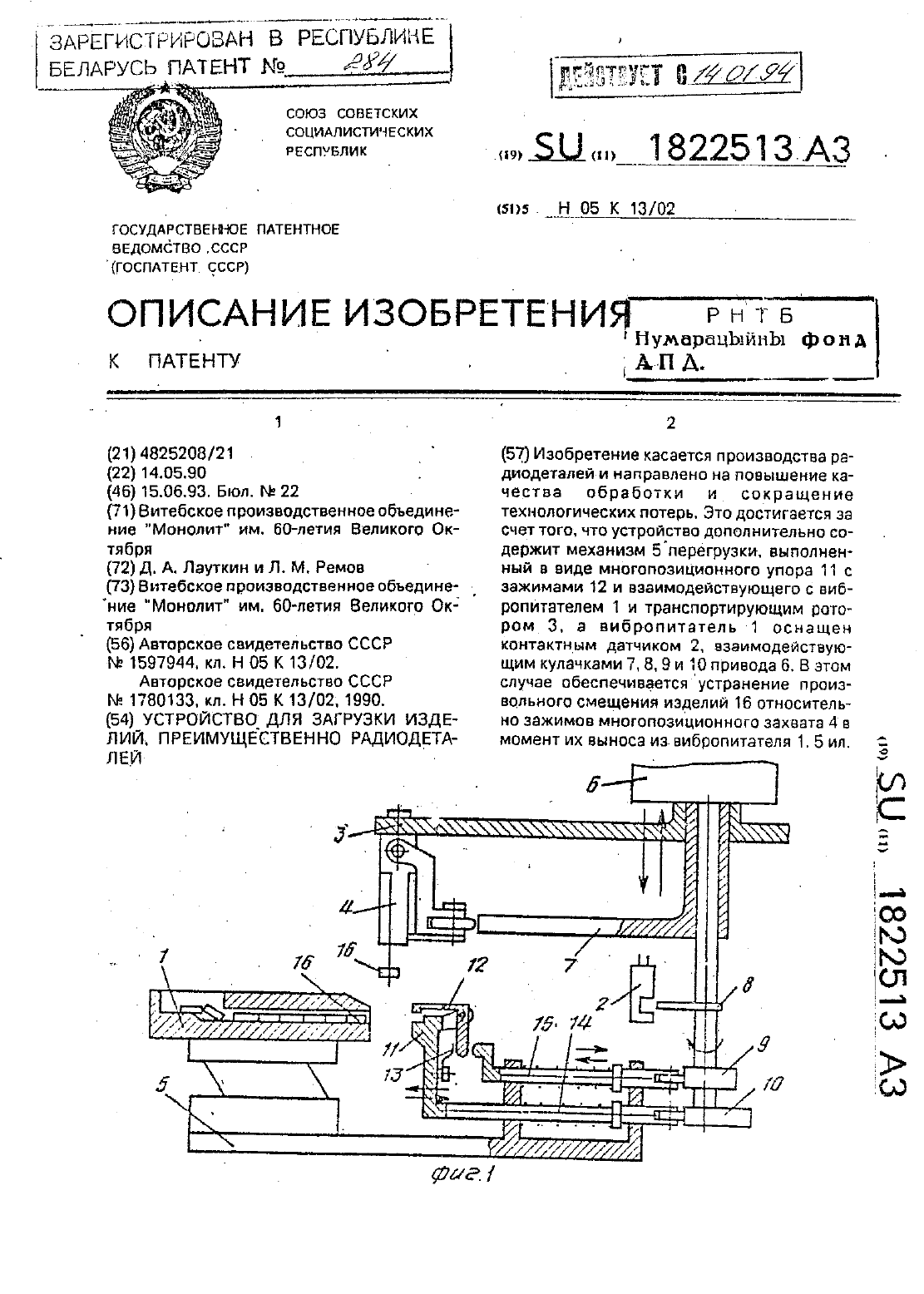
Устройство для загрузки изделий, преимущественно радиодеталей
Номер патента: 284
Опубликовано: 30.12.1994
Авторы: Лауткин Д. А., Ремов Л. М.
МПК: H05K 13/02
Метки: преимущественно, радиодеталей, устройство, изделий, загрузки
Текст:
...на нем зажимами 12 в крайнее левое положение (см. фиг. 2 ) имольном рЭССТОЯНИИ ОТ МНОГОРУЧЬЭВОГО вибропитателя 1. Кулачок 9 через шток 15 нажимает на вертикальные плечи зажимов 12 и обеспечивает отходов их заэкимных губок от пиногопозиционного упора П. Кулачок 8 взаимодействует с контактным датчиком 2 и включает электропитание многоручьевого вибропитателп 1. Под действи ем вибрации первый ряд изделий 16частично выходит с каналов...
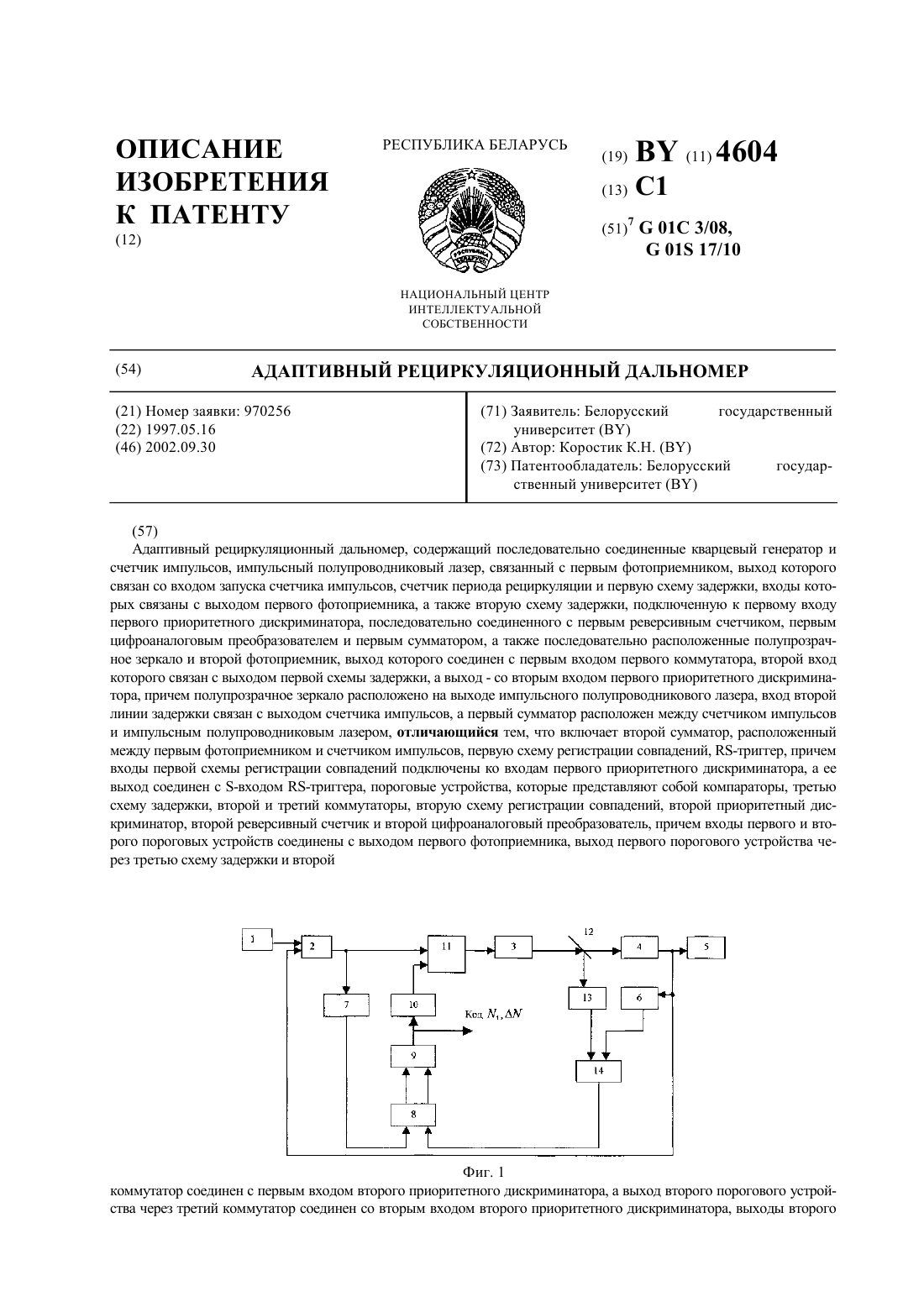
Адаптивный рециркуляционный дальномер
Номер патента: 4604
Опубликовано: 30.09.2002
Автор: Коростик Константин Николаевич
МПК: G01S 17/10, G01C 3/08
Метки: адаптивный, рециркуляционный, дальномер
Текст:
...дискриминатора 23, а выход порогового устройства 18 через третий коммутатор 21 соединяется со вторым входом второго приоритетного дискриминатора 23, выходы второго приоритетного дискриминатора соединяются со входами прямого и обратного счета второго реверсивного счетчика 24, информационные выходы которого соединяются со входами второго цифроаналогового преобразователя 25, выход второго цифроаналогового преобразователя подключается ко входу...
Транспортное средство с измерителем загрузки
Номер патента: 5644
Опубликовано: 30.12.2003
Авторы: Геращенко Василий Васильевич, Солонинко Олег Валентинович, Лобах Василий Павлович
МПК: B60P 5/00, B60K 28/00
Метки: транспортное, средство, измерителем, загрузки
Текст:
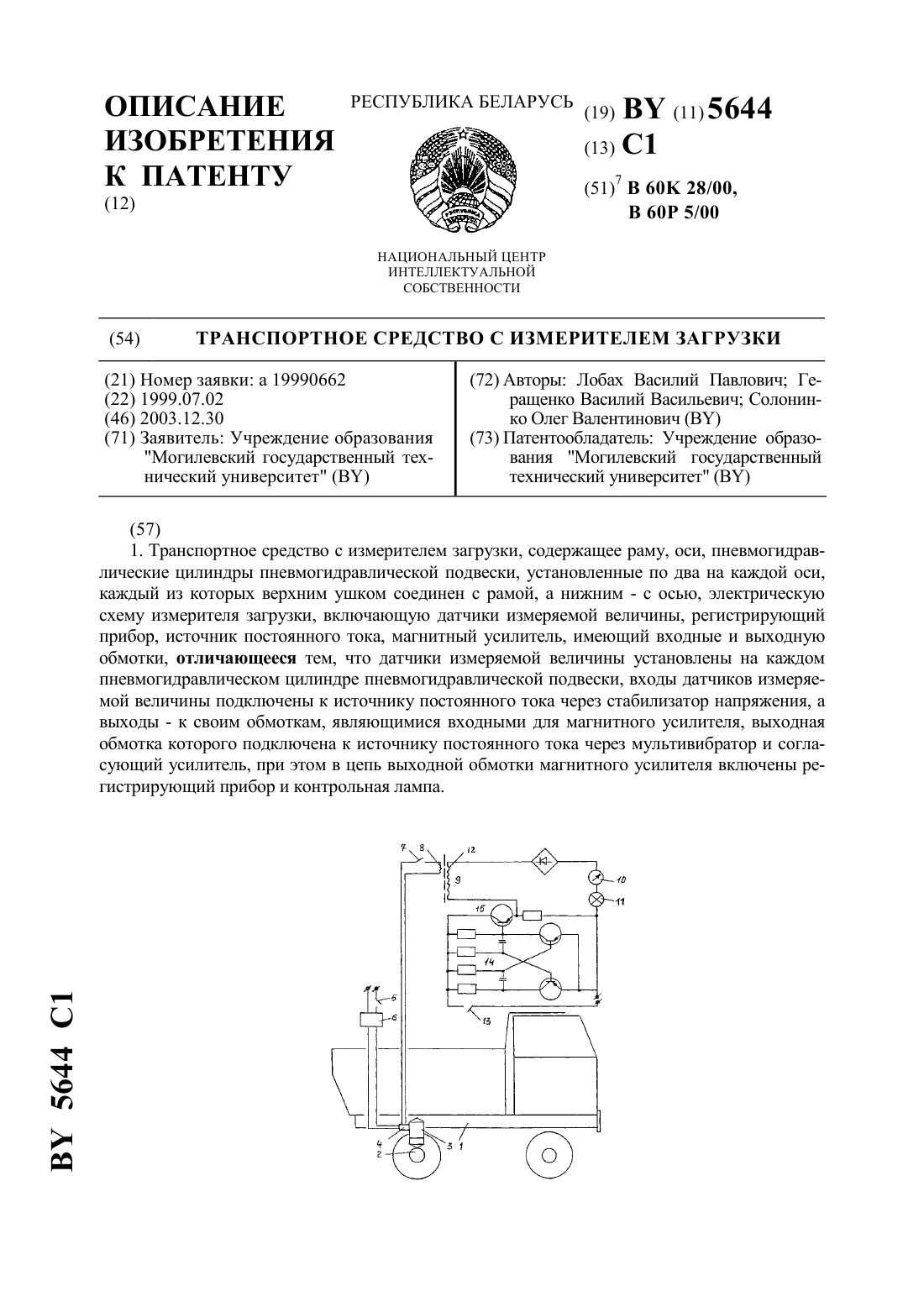
...включающую датчики измеряемой величины, регистрирующий прибор, источник постоянного тока, магнитный усилитель, имеющий входные и выходную обмотки, согласно изобретению, снабжено датчиками измеряемой величины, установленными на каждом пневмогидравлическом цилиндре пневмогидравлической подвески, входы датчиков измеряемой величины подключены к источнику постоянного тока через стабилизатор напряжения, а выходы каждого - к своим...
Предыдущий патент: Способ определения характеристик перегонки жидких нефтепродуктов посредством мини-экспресс-перегонки и устройство для его осуществления
Следующий патент: Способ изготовления шлифовального инструмента
Случайный патент: Износостойкая прокладка узла сопряжения боковой рамы тележки с корпусом буксы коленой пары