Адаптивный рециркуляционный дальномер
Текст
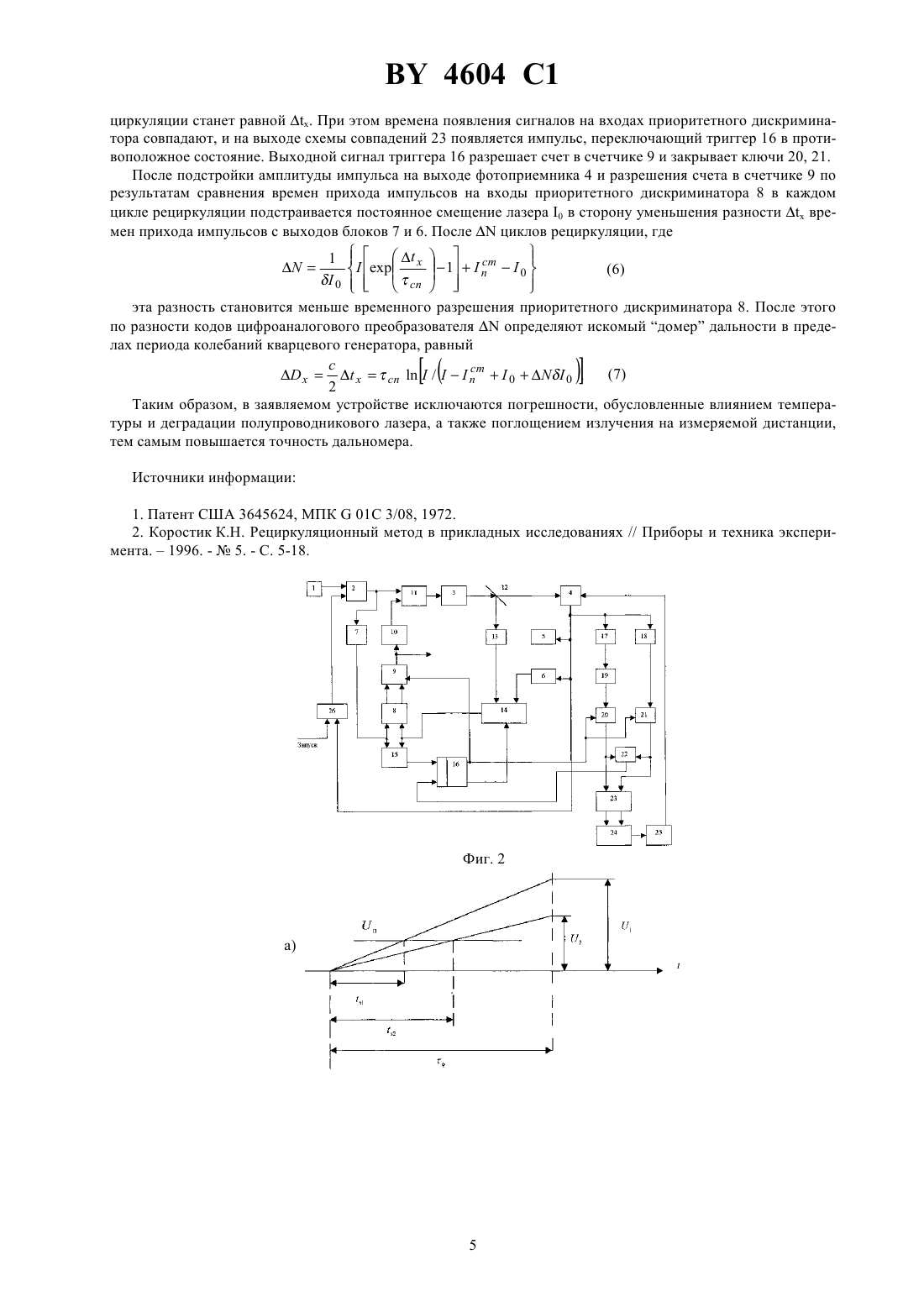
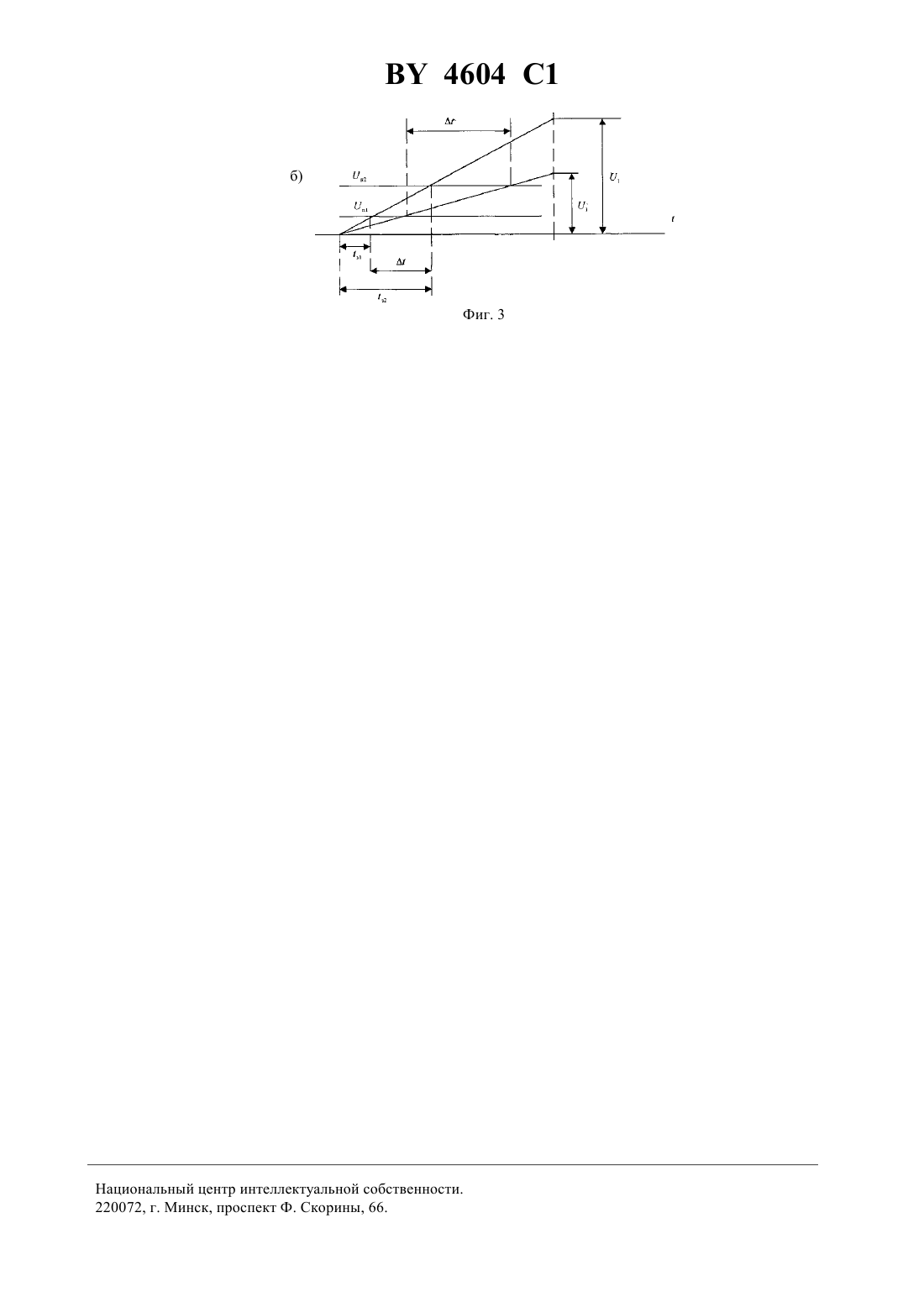
(71) Заявитель Белорусский государственный университет(73) Патентообладатель Белорусский государственный университет(57) Адаптивный рециркуляционный дальномер, содержащий последовательно соединенные кварцевый генератор и счетчик импульсов, импульсный полупроводниковый лазер, связанный с первым фотоприемником, выход которого связан со входом запуска счетчика импульсов, счетчик периода рециркуляции и первую схему задержки, входы которых связаны с выходом первого фотоприемника, а также вторую схему задержки, подключенную к первому входу первого приоритетного дискриминатора, последовательно соединенного с первым реверсивным счетчиком, первым цифроаналоговым преобразователем и первым сумматором, а также последовательно расположенные полупрозрачное зеркало и второй фотоприемник, выход которого соединен с первым входом первого коммутатора, второй вход которого связан с выходом первой схемы задержки, а выход - со вторым входом первого приоритетного дискриминатора, причем полупрозрачное зеркало расположено на выходе импульсного полупроводникового лазера, вход второй линии задержки связан с выходом счетчика импульсов, а первый сумматор расположен между счетчиком импульсов и импульсным полупроводниковым лазером, отличающийся тем, что включает второй сумматор, расположенный между первым фотоприемником и счетчиком импульсов, первую схему регистрации совпадений, -триггер, причем входы первой схемы регистрации совпадений подключены ко входам первого приоритетного дискриминатора, а ее выход соединен с -входом -триггера, пороговые устройства, которые представляют собой компараторы, третью схему задержки, второй и третий коммутаторы, вторую схему регистрации совпадений, второй приоритетный дискриминатор, второй реверсивный счетчик и второй цифроаналоговый преобразователь, причем входы первого и второго пороговых устройств соединены с выходом первого фотоприемника, выход первого порогового устройства через третью схему задержки и второй Фиг. 1 коммутатор соединен с первым входом второго приоритетного дискриминатора, а выход второго порогового устройства через третий коммутатор соединен со вторым входом второго приоритетного дискриминатора, выходы второго 4604 1 приоритетного дискриминатора соединены со входами прямого и обратного счета второго реверсивного счетчика,информационные выходы которого соединены со входами второго цифроаналогового преобразователя, выход которого подключен ко входу управления усилением в первом фотоприемнике, входы второй схемы регистрации совпадений подключены ко входам второго приоритетного дискриминатора, а ее выход - к -входу -триггера, прямой выход -триггера подключен ко входу запрещения счета первого реверсивного счетчика и входам управления второго и третьего коммутаторов, а инверсный выход -триггера соединен со входом управления первого коммутатора. Изобретение относится к измерительной технике и может использоваться при создании дальномерных устройств на основе полупроводниковых лазеров. Известен дальномер 1, в котором дальность до объекта определяется по частоте рециркуляции оптоэлектронного рециркуляционного генератора, в котором измеряемое расстояние выполняет роль оптической линии задержки. Недостатком, ограничивающим точность измерения дальности с помощью дальномера 1, является нестабильность задержки в оптоэлектронной части схемы из-за изменяющихся температуры окружающей среды и ослабления оптического сигнала при распространении его на измеряемой дистанции. Наиболее близким к предлагаемому является рециркуляционный дальномер 2 с кварцевой стабилизацией частоты рециркуляции и стабилизацией задержки стимулированного излучения в полупроводниковом лазере. Стабилизация задержки стимулированного излучения полупроводникового лазера в 2 позволяет повысить точность измерения дальности при разных температурах, деградации лазера и не требует применения отдельной схемы домера дальности в пределах периода синхронизирующего кварцевого генератора, поскольку домер реализуется на самом полупроводниковом лазере посредством регулировки задержки его излучения током накачки. Однако как для 1, так и для 2 характерна погрешность определения дальности, обусловленная затуханием лазерного излучения при распространении его на измеряемой дистанции. В зависимости от величины коэффициента поглощения среды, в которой распространяется излучение, изменяется амплитуда импульсного сигнала на выходе фотоприемника дальномера. При конечном фронте нарастания импульса на выходе фотоприемника при заданном пороге регистрации принимаемого с дистанции сигнала непостоянство амплитуды сигнала на выходе приемника эквивалентно изменению задержки сигнала на выходе фотоприемного устройства. Это приводит к изменению частоты рециркуляции в зависимости от поглощения излучения в среде, а следовательно к погрешности определения дальности. В заявляемом устройстве поставлена задача устранить зависимость амплитуды импульсного сигнала на выходе фотоприемника, принимающего излучение с дистанции, от величины коэффициента поглощения излучения в среде и тем самым повысить точность определения дальности с его помощью. Поставленная задача решается тем, что в устройство 2, содержащее кварцевый генератор, счетчик импульсов, импульсный полупроводниковый лазер, первый фотоприемник, счетчик периода рециркуляции,первую схему задержки, вторую схему задержки, приоритетный дискриминатор, реверсивный счетчик, цифроаналоговый преобразователь, первый сумматор, полупрозрачное зеркало, второй фотоприемник, коммутатор, дополнительно вводятся первая схема регистрации совпадений, -триггер, два пороговых устройства,третья схема задержки, второй и третий коммутаторы, вторая схема совпадений, второй приоритетный дискриминатор, второй реверсивный счетчик, второй цифроаналоговый преобразователь. Благодаря дополнительно введенным блокам в заявляемом дальномере в отличие от прототипа при изменении оптической мощности, попадающей на первый фотоприемник из-за различного от измерения к измерению поглощения излучения в атмосфере, осуществляется подстройка усиления в нем и стабилизация амплитуды сигнала на его выходе. Это устраняет дополнительную задержку в контуре рециркуляции дальномера и тем самым повышает его точность. Сущность изобретения поясняется чертежами. На фиг. 1 представлена функциональная схема устройствапрототипа. На фиг. 2 показана функциональная схема заявляемого устройства. На фиг. 3 показаны времен 2 4604 1 ные диаграммы, поясняющие причину возникновения дополнительной погрешности и сущность стабилизации импульсного отклика фотоприемника дальномера. Устройство содержит (фиг. 1, 2) последовательно соединенные кварцевый генератор 1, счетчик импульсов 2, импульсный полупроводниковый лазер 3, первый фотоприемник 4, выход которого связан со входом запуска счетчика 2, счетчик периода рециркуляции 5 и первую схему задержки 6, входы которых связаны с выходом фотоприемника 4, а также последовательно соединенные вторую схему задержки 7, приоритетный дискриминатор 8, реверсивный счетчик 9, цифроаналоговый преобразователь 10 и первый сумматор 11, а также последовательно расположенные полупрозрачное зеркало 12, второй фотоприемник 13 и коммутатор 14, второй вход которого связан с выходом первой схемы задержки 6, а выход - со вторым входом приоритетного дискриминатора, причем полупрозрачное зеркало расположено на выходе полупроводникового лазера, вход второй линии задержки 7 связан с выходом счетчика 2, а первый сумматор 11 расположен между счетчиком 2 и импульсным полупроводниковым лазером 3, а также дополнительно введенные первую схему регистрации совпадений 15, -триггер 16, причем входы схемы совпадений 15 подключаются ко входам приоритетного дискриминатора 8, а ее выход соединяется с -входом триггера 16, пороговые устройства (компараторы) 17, 18,третью схему задержки 19, второй и третий коммутаторы 20, 21, вторую схему совпадений 22, второй приоритетный дискриминатор 23, второй реверсивный счетчик 24 и второй цифроаналоговый преобразователь 25,причем входы пороговых устройств 17, 18 соединяются с выходом первого фотоприемника 4, выход порогового устройства 17 через третью схему задержки 19 и второй коммутатор 20 соединяется с первым входом второго приоритетного дискриминатора 23, а выход порогового устройства 18 через третий коммутатор 21 соединяется со вторым входом второго приоритетного дискриминатора 23, выходы второго приоритетного дискриминатора соединяются со входами прямого и обратного счета второго реверсивного счетчика 24, информационные выходы которого соединяются со входами второго цифроаналогового преобразователя 25, выход второго цифроаналогового преобразователя подключается ко входу управления усилением в первом фотоприемнике 4, входы второй схемы регистрации совпадений 22 подключаются ко входам второго приоритетного дискриминатора, а ее выход - к -входу триггера 16, прямой выход триггера 16 подключается ко входу запрещения счета первого реверсивного счетчика 9 и входом управления второго и третьего коммутаторов 20, 21, а инверсный выход триггера 16 соединяется со входом управления первого коммутатора 14, а также вводится второй сумматор 26, включенный между выходом первого фотоприемника 4 и выходом разрешения счета счетчика 2, второй вход сумматора 26 является входом запуска устройства. Принцип измерения дальности объектов с помощью заявляемого устройства можно пояснить следующим образом. Частота рециркуляции оптоэлектронного рециркуляционного генератора , синхронизируемого внешним кварцевым генератором, когда измеряемое расстояние выполняет функцию оптической линии задержки в цепи обратной связи, а задержка импульсов излучения в полупроводниковом лазере относительно импульсов тока стабилизируется, описывается выражением 1 Здесь- дальность до объекта, с - скорость света, элТкг (Ткг - период колебаний кварцевого генератост ра,- целое число),лаз - задержка импульса стимулированного излучения в полупроводниковом лазере в режиме ее стабилизации, х - временное рассогласование между фронтом импульса с кварцевого генератора и моментом прихода (моментом регистрации) импульса излучения с дистанции, х - дополнительная задержка, возникающая при регистрации излучения и обусловленная его затуханием на дистанции. ст Измеряя частоту рециркуляции- по известным эл илаз с точностью до х и х из выражения (1) оп ределяется искомая дальность . В устройстве 2 временной интервал х определяется по величине тока постоянного смещения 0, необходимого для изменения задержки излучения в лазере на такую величину 0,при которой достигается режим синхронизации частоты рециркуляции оптоэлектронного генератора с частотой колебаний кварцевого генератора, а х 0. При этом используется зависимость задержки генерации в лазере от тока ст где сп - спонтанное время жизни неравновесных носителей заряда в полупроводниковом лазере,- амплитуст да импульса возбуждающего тока,п - пороговый ток лазе при работе его в стационарном режиме. Используя (2), можно получить 4604 1 где 0 - приращение тока постоянного смещения, необходимое для изменения задержки генерации в лазере на величину х. Однако в 2 временной интервал х, обусловленный затуханием излучения в атмосфере, остается неопределенным (не учитывается), что и ограничивает точность измерения дальности таким устройством. Для линейного фронта импульса на выходе первого фотоприемника временной интервал х имеет величину(4)1 2 где ф - длительность фронта импульса, п - пороговое напряжение, соответствующее уровню регистрации сигнала с измеряемой дистанции, 1 - амплитуда импульсов на выходе фотоприемника, когда измеряемая дистанция равна нулю,2 - амплитуда импульсов на выходе фотоприемника для измеряемой дистанции. В заявляемом устройстве автоматически после подстройки постоянного смещения лазера 0 до значения,ст необходимого для установки в нем задержки излучениялаз , происходит регулировка усиления в фотопри емнике и компенсация падения амплитуды 1 - 2 из-за затухания сигнала на измеряемой дистанции. Тем самым повышается точность измерения дальности по сравнению с прототипом. Устройство работает следующим образом. Первоначально первый коммутатор 14 устанавливается в состояние передачи сигнала со входа 1 на выход. Триггер 16 находится в состоянии, когда его сигналом с выходасчет в счетчике 9 разрешен, а коммутаторы 20, 21 закрыты. По импульсу на входе Запуск устройства счетчик 2 начинает выделение -ого импульса из последовательности импульсов кварцевого генератора 1. Выходной импульс счетчика 2, привязанный к счетному перепаду импульсов с генератора 1, подается на полупроводниковый лазер 3, который с некоторой задержкойизлучает световой импульс, который регистрируется фотоприемником 13 и посылается на измеряемую дистанцию. Пришедший с дистанции световой импульс регистрируется фотоприемником 4, сигнал с выхода которого поступает на вход запуска счетчика 2, и цикл повторяется. Если в первом цикле рециркуляции задержка импульса стимулированного излучения отст ст носительно импульса токане равна задержкелаз в линии задержки 7 (пусть для определенностилаз ),то по выходному импульсу приоритетного дискриминатора 8 напряжение на выходе цифроаналогового преобразователя повысится на 0, что обеспечит приращение тока через полупроводниковый лазер 3 на 0. Приращению тока через полупроводниковый лазер на 0 будет соответствовать изменение задержки лаз,определяемое согласно (3), в котором вместо 0 следует подставить 0. Описанный процесс подстройки временного положения импульса излучения лазера относительно задержанного (с помощью калиброванной ст линии задержки 7) продолжается до тех пор, пока разность их времен прихода-лаз не составит величину, меньшую- временного разрешения первого приоритетного дискриминатора 8. Число циклов рециркуляции 1 (начальный код цифроаналогового преобразователя), необходимых, чтобы стабилизировать временное положение светового импульса полупроводникового лазера относительно токового, задержанного на время , определяется из выражения ст Из-за различных температурных условий, в которых проводится измерение дальности объекта, значение ст 1 различно от измерения к измерению (из-за зависимостип от температуры). Однако во всех случаях после достижения режима стабилизации при данной температуре в полупроводниковом лазере устанавливаст ется задержкалаз . Таким образом, определению 1, при котором достигается режим стабилизации, можно уподобить операцию калибровки управляемой линии задержки - полупроводникового лазера. При достижении режима стабилизации задержки излучения в полупроводниковом лазере на выходе схемы совпадений 15 появляется импульс, который по -входу переключает триггер 16. При этом счет в счетчике 9 запрещается, коммутатор 14 переключается в состояние для передачи сигнала со входа 2 на выход, а коммутаторы 20, 21 открываются. В пороговых устройствах 17 и 18 установлены пороги срабатывания п 1 п 2 (фиг. 3, б), а задержка в блоке 19 выбирается равной . В этом случае, когда измеряемое расстояние равно нулю, то амплитуда импульса на выходе фотоприемника равна 1, и на входы приоритетного дискриминатора импульсы поступают в совпадающие моменты времени. Если амплитуда импульса на выходе фотоприемника 4 из-за поглощения излучения на измеряемой дистанции уменьшилась, то времена поступления на входы приоритетного дискриминатора 23 не совпадают(, см. фиг. 3, б). Это вызывает подстройку напряжения питания фотоприемника 4 сигналом с цифроаналогового преобразователя 25. Подстройка происходит по каждому импульсу на выходе фотоприемника 4 до тех пор, пока амплитуда этого импульса не станет равной 1, а дополнительная задержка в контуре ре 4 4604 1 циркуляции станет равной х. При этом времена появления сигналов на входах приоритетного дискриминатора совпадают, и на выходе схемы совпадений 23 появляется импульс, переключающий триггер 16 в противоположное состояние. Выходной сигнал триггера 16 разрешает счет в счетчике 9 и закрывает ключи 20, 21. После подстройки амплитуды импульса на выходе фотоприемника 4 и разрешения счета в счетчике 9 по результатам сравнения времен прихода импульсов на входы приоритетного дискриминатора 8 в каждом цикле рециркуляции подстраивается постоянное смещение лазера 0 в сторону уменьшения разности х времен прихода импульсов с выходов блоков 7 и 6. Послециклов рециркуляции, где эта разность становится меньше временного разрешения приоритетного дискриминатора 8. После этого по разности кодов цифроаналогового преобразователяопределяют искомый домер дальности в пределах периода колебаний кварцевого генератора, равный(7)сп/п 00 . 2 Таким образом, в заявляемом устройстве исключаются погрешности, обусловленные влиянием температуры и деградации полупроводникового лазера, а также поглощением излучения на измеряемой дистанции,тем самым повышается точность дальномера. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01C 3/08, G01S 17/10
Метки: дальномер, рециркуляционный, адаптивный
Код ссылки
<a href="https://by.patents.su/6-4604-adaptivnyjj-recirkulyacionnyjj-dalnomer.html" rel="bookmark" title="База патентов Беларуси">Адаптивный рециркуляционный дальномер</a>
Адаптивный дельта-кодер
Номер патента: 1181
Опубликовано: 14.06.1996
Авторы: Хейфец Дмитрий Львович, Гебергер Генрих Хаймович, Буздалина Ирина Александровна, Угер Владимир Георгиевич
МПК: H03M 3/02
Метки: дельта-кодер, адаптивный
Текст:
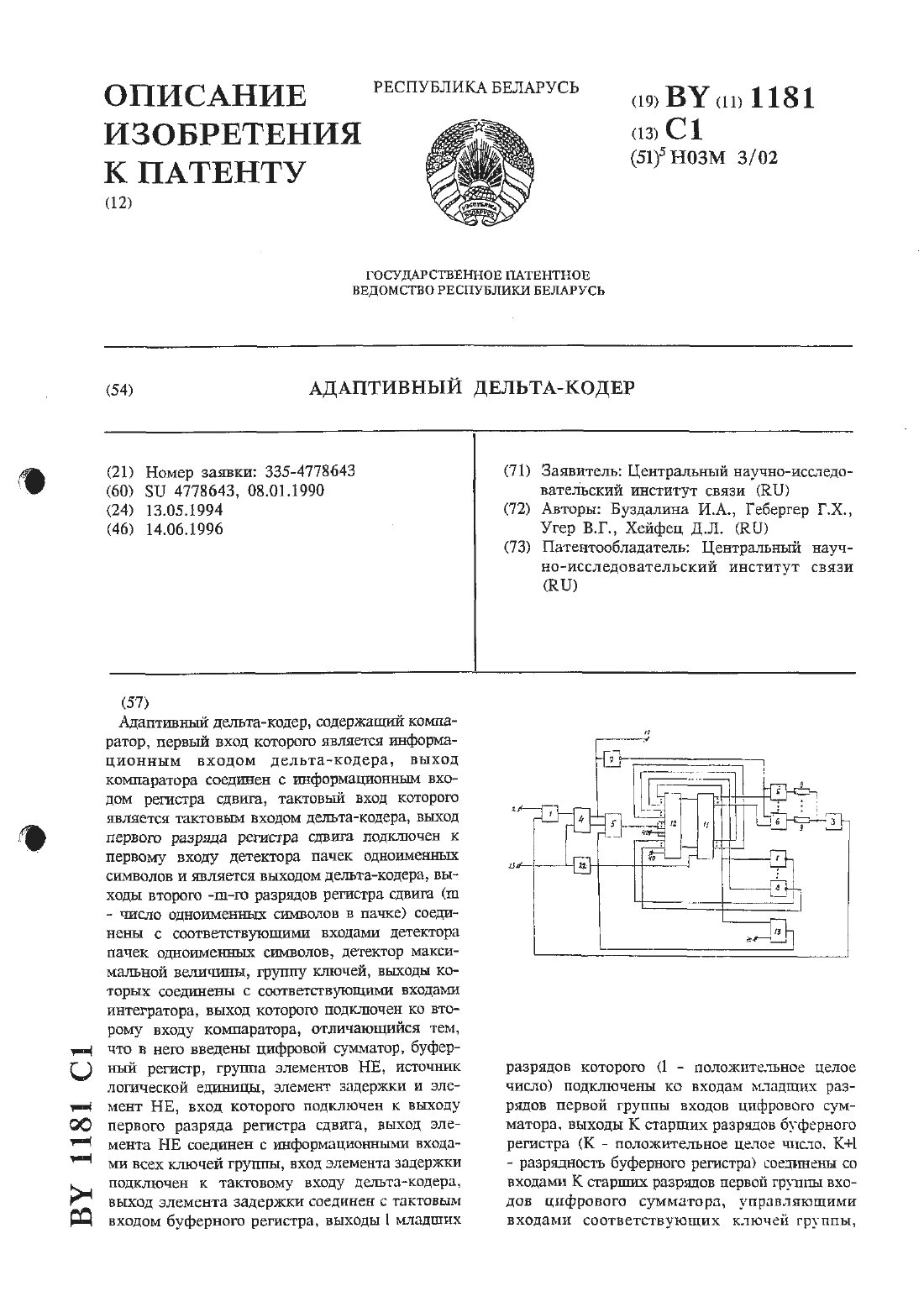
...адаптивного дегсьта-кодера.Адаптивный дельта-колер содержит компаратор 1, выход которого соединен с информационным входом ретистра 2 сдвига, детектор З пачек одноименных символов, выполненный в виде детектора четырех (или трех) следующих подряд одноименных посылок, детектор 4 мак 5 ВУ 1181 С 1 всимальной величины, являющийся фиксатором величины максимального шага квантования,группу ключей 5, выходы которых соединены с соответствующими...
Анализатор функции распределения флуктуаций временых интервалов
Номер патента: 1809
Опубликовано: 30.12.1997
Авторы: Коростик Константин Николаевич, Малевич Игорь Александрович
МПК: G04F 10/04, G04F 10/00
Метки: флуктуаций, интервалов, функции, анализатор, временых, распределения
Текст:
...со входом записи буферного регистра, выход элемента задержки соединяется со входом управления первого коммутатора счетных импульсов и входом первого формирователя импульсов обнуления первого счетчика, а через инвертор - со входом управления второго коммутатора счетных импульсов и входом второго формирователя импульсов обнуления второго счетчика, выходы первого и второго формирователей импульсов обнуления соединяются, соответственно, со...
Лазерный дальномер
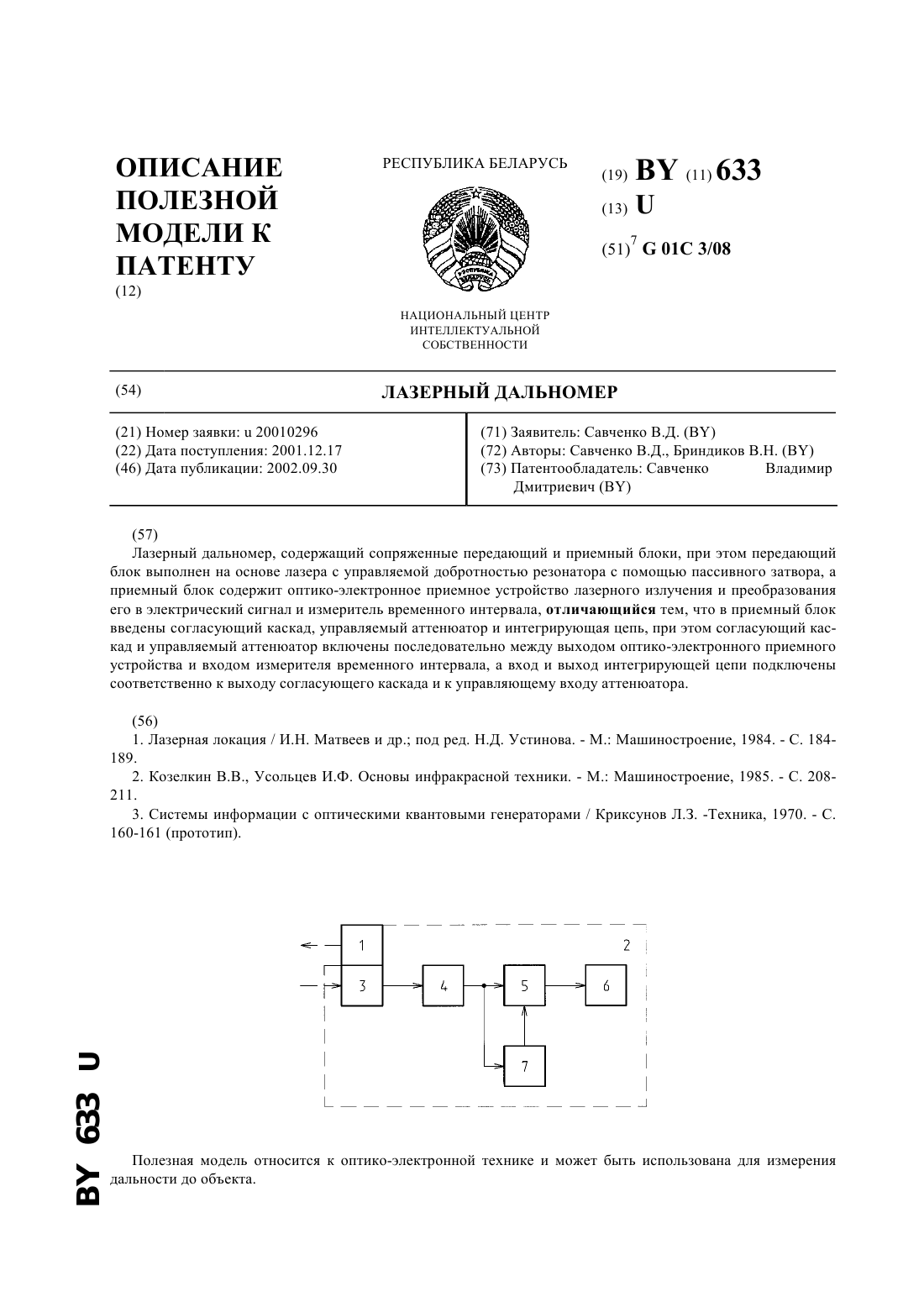
Номер патента: U 633
Опубликовано: 30.09.2002
Авторы: Савченко Владимир Дмитриевич, Бриндиков Виктор Николаевич
МПК: G01C 3/08
Текст:
...в приемный блок введены согласующий каскад, управляемый аттенюатор и интегрирующая цепь, при этом согласующий каскад и управляемый аттенюатор включены последовательно между выходом оптико-электронного приемного устройства и входом измерителя временного интервала, а вход и выход интегрирующей цепи подключены соответственно к выходу согласующего каскада и к управляющему входу аттенюатора. Введение новых элементов и в указанной связи с...
Импульсно-фазовый дискриминатор
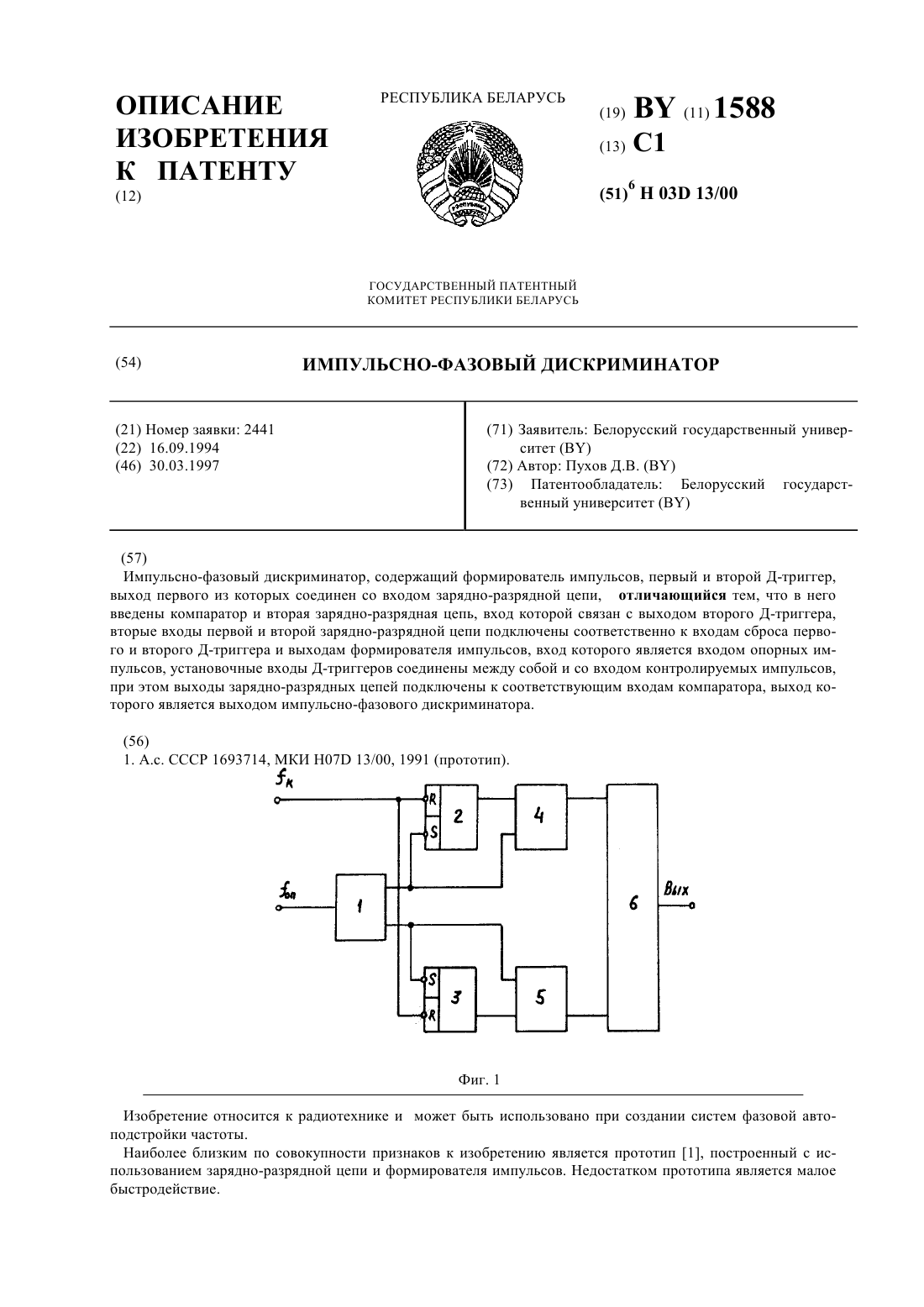
Номер патента: 1588
Опубликовано: 30.03.1997
Автор: Пухов Дмитрий Витальевич
МПК: H03D 13/00
Метки: импульсно-фазовый, дискриминатор
Текст:
...электрические схемы функциональных элементов. Импульсно-фазовый дискриминатор содержит формирователь импульсов 1, первый 2 и второй 3 триггеры, первую 4 и вторую 5 зарядно-разрядные цепи, компаратор 6. Причем первый -триггер и первая зарядно-разрядная цепь образуют первый канал, а второй -триггер и вторая зарядно-разрядная цепь второй канал, соответственно. Импульсно-фазовый дискриминатор работает следующим образом. Пусть опорные оп и...
Устройство для измерения скорости распространения ультразвука
Номер патента: 1683
Опубликовано: 30.06.1997
Автор: Чернобай Иван Александрович
МПК: G01H 5/00
Метки: ультразвука, скорости, устройство, распространения, измерения
Текст:
...помехиостаточные и реверберациоиные сигналы. Первая схема 9 совпадения на своем выходе формирует по наиболее крупному фронту информативного сигнала в момент Времени короткие импульсы П,(ФИГ- 2 К), поступающие на второй вход первого триггера 10, которй перебрасывается в исходное (нулевое) состояние, запрещающее второй схеме 11 совпадений пропускать снгналы опорного генератора 1 на счетнывход первого счетчика 12 импульсов.схемы 9...
Предыдущий патент: Оптически прозрачный чувствительный к давлению клей для поляризаторов
Следующий патент: Способ теплоснабжения
Случайный патент: Дорожный светофор с дополнительной секцией