Способ интеллектуального управления и диагностирования транспортного средства
Текст
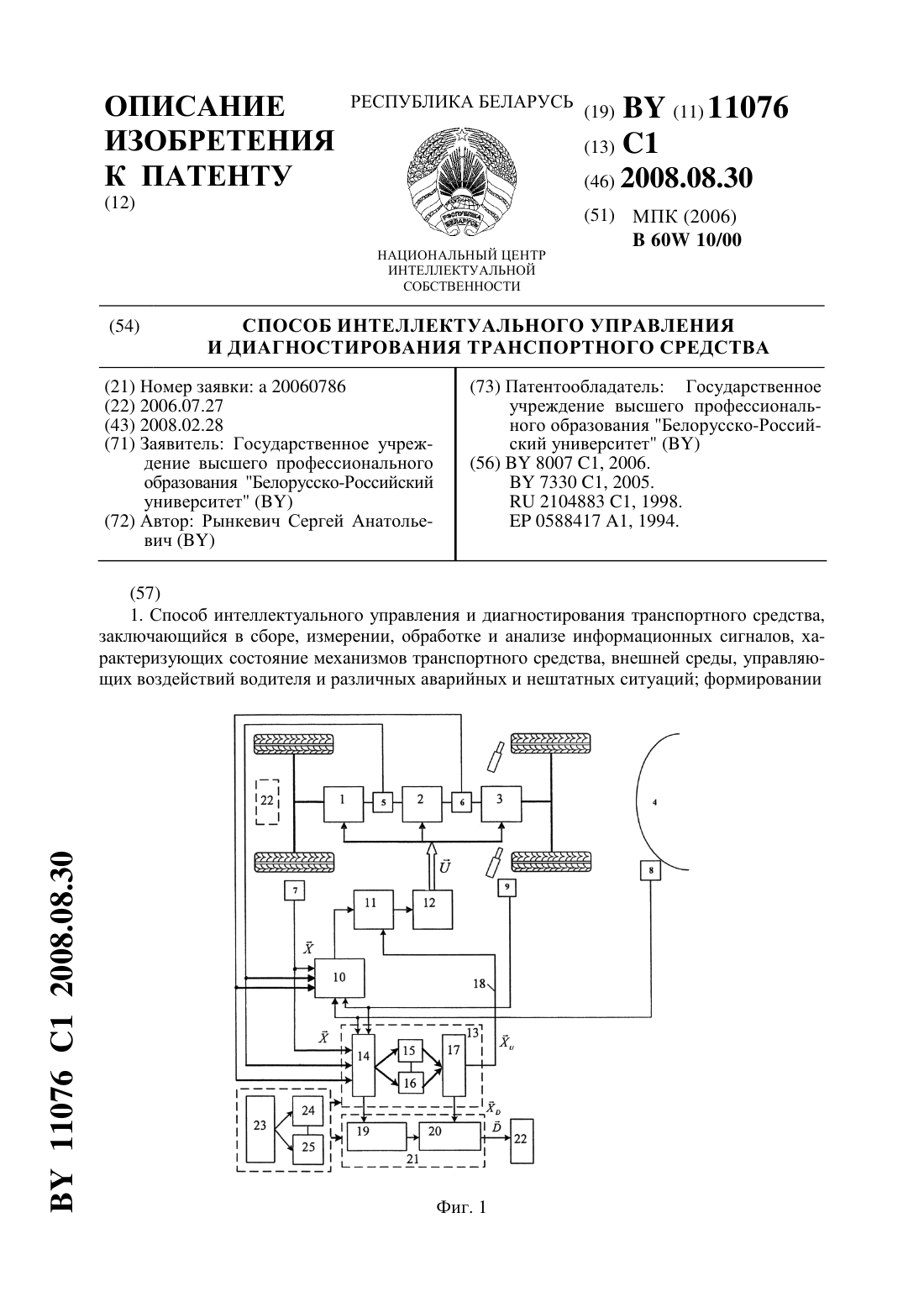
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО УПРАВЛЕНИЯ И ДИАГНОСТИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Автор Рынкевич Сергей Анатольевич(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Способ интеллектуального управления и диагностирования транспортного средства,заключающийся в сборе, измерении, обработке и анализе информационных сигналов, характеризующих состояние механизмов транспортного средства, внешней среды, управляющих воздействий водителя и различных аварийных и нештатных ситуаций формировании 11076 1 2008.08.30 и отработке адаптивной программы управления переключением ступеней коробки передач, режимами двигателя, тормозной системой и другими механизмами транспортного средства, формировании экспертной базы знаний и программы оценки технического состояния механизмов транспортного средства, отличающийся тем, что информационные сигналы относят к диагностируемым параметрам и используют для последующего определения и оценки технического состояния механизмов транспортного средства, при этом информационные сигналы, характеризующие параметры внешней среды и дорожных условий, управляющие воздействия водителя, скоростные режимы движения транспортного средства, особенности управления транспортным средством водителем, обусловленные его стилем вождения и квалификацией, степень загрузки транспортного средства, допустимые режимы работы двигателя, трансмиссии и тормозной системы и пределы безопасных режимов движения транспортного средства в реальных дорожных условиях разделяют на диагностические, контролируемые, собственно информационные и управляющие сигналы, осуществляют процедуру фаззификации характеристик и параметров собираемой, передаваемой и обрабатываемой информации в виде диагностических, контролируемых и управляющих сигналов, составляют и формализуют продукционные правила, осуществляют процедуру дефаззификации и формируют в режиме реального времени сигналы, посредством которых получают результат предварительного технического диагноза, который проверяют и уточняют в экспертной базе знаний для получения результата окончательного технического диагноза состояния механизмов транспортного средства, с визуализацией путем отображения на информационном дисплее водителя или оператора, причем для определения требуемого множества диагностических сигналов и определения их взаимосвязи непосредственно в процессе эксплуатации транспортного средства или предварительно осуществляют имитационное моделирование процессов функционирования механизмов транспортного средства, корреляционный и регрессионный анализ, затем осуществляют формализацию упомянутых сигналов средствами нечеткой логики путем описания их функциями принадлежности и составления продукционных правил, фаззификацию и дефаззификацию с получением выходных сигналов, которые используют для формирования окончательного технического диагноза состояния механизмов транспортного средства. 2. Способ по п. 1, отличающийся тем, что управляющие сигналы переключением ступеней коробки передач, режимами двигателя, тормозной системой, системой виброзащиты и другими механизмами транспортного средства предварительно подвергают обработке методами нечеткой логики и/или искусственных нейронных сетей. 3. Способ по п. 1, отличающийся тем, что диагностические, контролируемые, собственно информационные и управляющие сигналы сохраняют в памяти бортового процессора транспортного средства с возможностью их последующей передачи посредством носителей информации в стационарный процессор, содержащий экспертную базу знаний. Изобретение относится к транспортному машиностроению, а именно к системам автоматического управления транспортными средствами. Известны способы адаптивного управления энергетическими режимами автотранспортного средства, заключающиеся в реализации операций сбора информации, измерения,обработки и анализа информационных сигналов, а также операций формирования и отработки сигналов управления переключением передач, блокировкой гидротрансформатора и режимами двигателя исполнительными механизмами путем выбора программных значений из базы данных, хранящихся в памяти процессора или ЭВМ, в соответствии с заложенным алгоритмом управления, с использованием операций нечеткой логики или других интеллектуальных технологий 1, 2. 2 11076 1 2008.08.30 Недостатком упомянутых способов является невозможность осуществления оперативного диагностирования механизмов и деталей автотранспортного средства, т.е. своевременного текущего определения технического состояния и установления возникших неисправностей. В то же время, особенно при эксплуатации большегрузных автомобилей-самосвалов и городских автобусов, возникающие при движении машины поломки и отказы отдельных механизмов и элементов, которые не удалось вовремя обнаружить и локализовать, могут привести к значительным материальным потерям, а также к возникновению опасных ситуаций. Данный недостаток приводит к существенному уменьшению эффективности и надежности управления и снижению безопасности. Недостатком способов является также то, что они лишены универсальности, поскольку они позволяют снимать множество различной информации только лишь с целью управления энергетическими режимами, хотя к современных машинам предъявляются требования, которые, помимо управления, устанавливают, что эти машины должны быть дополнительно снабжены устройствами для контроля информации и диагностирования параметров механизмов. Данный недостаток приводит к тому, что потенциальные возможности управления машиной используются не полностью, а отсутствие возможности своевременного обнаружения и парирования возникающих отказов, неисправностей и серьезных ситуаций приводит к снижению безопасности. Известен способ интеллектуального управления энергетическими режимами автотранспортного средства, заключающийся в сборе информации, измерении, обработке и анализе информационных сигналов и ситуаций, характеризующих состояние механизмов автотранспортного средства, внешней среды и управляющего воздействия водителя, и формировании адаптивной программы управления исполнительными механизмами переключения передач, блокировкой гидротрансформатора, режимами двигателя и тормозной системы на основе использования технологий нечеткой логики 3. Отмеченный способ имеет недостатки, аналогичные рассмотренным выше. Наиболее существенный из них - невозможность осуществления оперативного своевременного определения технического состояния машины и ее механизмов, т.е. установления возникших неисправностей (диагностирования). Недостатком является также невозможность постоянного мониторинга технического состояния механизмов машины, т.е. обработки поступающей информации в режиме реального времени для выделения опасных неисправностей, которые могут привести к отказам при эксплуатации транспортного средства. К недостаткам способа следует отнести сложность и высокую стоимость конструкции создаваемой на его основе системы, которая бы одновременно осуществляла комплексное управление и диагностирование. При этом возникают значительные сложности с использованием программного обеспечения для подсистемы диагностирования в режиме реального времени, а также обучения такой системы и пополнения базы знаний. Недостатком является затруднение диалога и взаимопонятного общения между информационными средствами индикации и человеком-оператором. Следует отметить также недостаточность и несвоевременность доставки нужной информации по назначению и неоперативность ее отображения. Между тем в современных системах необходимо выделение из множества информационных сигналов полезной диагностической информации с ее своевременным логическим анализом. Недостатком является также неудовлетворительное распознавание состояния механизмов транспортного средства в условиях ограниченной, неопределенной и трудноформализуемой информации и, в этой связи, невозможность раннего предупреждения неисправностей. Вместе с тем современные методы приема, передачи, обработки и анализа информации, использование интеллектуальных технологий (таких, например, как нечеткая логика и экспертные системы), применение бортовой микроэлектроники на подвижных объектах(автомобилях, тракторах, строительно-дорожных машинах) позволяют использовать потенциальные возможности машин в наиболее полной мере. Задачами изобретения являются повышение надежности управления и эффективности диагностирования, расширение функциональных возможностей систем автоматического управления механизмами транспортных средств, улучшение показателей эффективности транспортных средств, их ресурса и повышение безопасности движения. Указанные задачи достигаются тем, что в способе интеллектуального управления и диагностирования транспортного средства, заключающемся в сборе, измерении, обработке и анализе информационных сигналов, характеризующих состояние механизмов транспортного средства, внешней среды, управляющих воздействий водителя и различных аварийных и нештатных ситуаций формировании и отработке адаптивной программы управления переключением ступеней коробки передач, режимами двигателя, тормозной системой и другими механизмами транспортного средства, формировании экспертной базы знаний и программы оценки технического состояния механизмов транспортного средства, согласно изобретению, информационные сигналы относят к диагностируемым параметрам и используют для последующего определения и оценки технического состояния механизмов транспортного средства, при этом информационные сигналы, характеризующие параметры внешней среды и дорожных условий, управляющие воздействия водителя, скоростные режимы движения транспортного средства, особенности управления транспортным средством водителем, обусловленные его стилем вождения и квалификацией, степень загрузки транспортного средства, допустимые режимы работы двигателя,трансмиссии и тормозной системы и пределы безопасных режимов движения транспортного средства в реальных дорожных условиях разделяют на диагностические, контролируемые, собственно информационные и управляющие сигналы, осуществляют процедуры фаззификации характеристик и параметров собираемой, передаваемой и обрабатываемой информации в виде диагностических, контролируемых и управляющих сигналов, составляют и формализуют продукционные правила, осуществляют процедуру дефаззификации и формируют в режиме реального времени сигналы, посредством которых получают результат предварительного технического диагноза, который проверяют и уточняют в экспертной базе знаний для получения результата окончательного технического диагноза состояния механизмов транспортного средства, с визуализацией путем отображения на информационном дисплее водителя или оператора, причем для определения требуемого множества диагностических сигналов и определения их взаимосвязи непосредственно в процессе эксплуатации транспортного средства или предварительно осуществляют имитационное моделирование процессов функционирования механизмов транспортного средства, корреляционный и регрессионный анализ, затем осуществляют формализацию упомянутых сигналов средствами нечеткой логики путем описания их функциями принадлежности и составления продукционных правил, фаззификацию и дефаззификацию с получением выходных сигналов, которые используют для формирования окончательного технического диагноза состояния механизмов транспортного средства. При этом управляющие сигналы переключением ступеней коробки передач, режимами двигателя, тормозной системой, системой виброзащиты и другими механизмами транспортного средства предварительно подвергают обработке методами нечеткой логики и/или искусственных нейронных сетей. Также диагностические, контролируемые, собственно информационные и управляющие сигналы сохраняют в памяти бортового процессора транспортного средства с возможностью их последующей передачи посредством носителей информации в стационарный процессор, содержащий экспертную базу знаний. В результате повышается надежность и эффективность систем автоматического управления и диагностирования транспортных средств, построенных с реализацией данного способа, и значительно расширяются их функциональные возможности. Во-первых, учитывается многообразие характеристик внешней среды, режимов движения, управляющих 4 11076 1 2008.08.30 воздействий водителя и различных ситуаций, во-вторых, информационные сигналы одновременно и оперативно используются как в качестве сигналов управления механизмами транспортного средства, так и в качестве диагностических параметров для эффективного определения технического состояния механизмов, в-третьих, процессы управления и диагностирования осуществляются в режиме реального времени с учетом особенностей внешней среды и различных ситуаций, в-четвертых, использование интеллектуальных технологий при обработке и анализе информации создает широкие возможности для адаптации и обучения алгоритмов управления и диагностирования. В итоге повышаются показатели эффективности машины (улучшаются тягово-скоростные показатели и топливной экономичности), увеличивается надежность и ресурс машины, облегчаются условия труда водителя и повышается безопасность движения. Сущность изобретения поясняется рисунками. На фиг. 1 представлен способ интеллектуального управления и диагностирования транспортного средства. На фиг. 2 показана методология интеллектуального диагностирования транспортного средства. На фиг. 3, 4 приведен алгоритм интеллектуального диагностирования транспортного средства, на фиг. 5, 6 показаны ветви алгоритма диагностирования механизмов тормозной системы и трансмиссии. Способ интеллектуального управления и диагностирования транспортного средства реализуется на схеме фиг. 1. На фиг. 1 показано транспортное средство, снабженное двигателем 1, трансмиссией 2, включающей гидротрансформатор либо сцепление с коробкой передач (не показаны), и тормозной системой 3, которое эксплуатируется в условиях внешней среды 4. Для сбора и измерения всевозможной информации (вектор) о параметрах и характеристиках управляющих воздействий водителя, механизмах и режимах транспортного средства, внешней среды и ситуаций используются различные датчики угловой скорости двигателя 5, трансмиссионных элементов (выходного вала коробки передач) 6, скорости 7 машины, характеристик макро- и микропрофиля поверхности дороги 8(уклона, коэффициента сопротивления и т.д.), давлений жидкости в подвеске 9, цилиндрах фрикционов переключения передач и магистралях гидропривода, тормозной системе,температуры и давления масла двигателя, трансмиссии и других механизмов (условно не показаны). Управляющие воздействия водителя фиксируются датчиками положения педалей акселератора, тормоза и рулевого колеса (на схеме условно не показаны). Собираемая датчиками информация поступает в блок обработки информации 10 и блок управления 11,формирующий базовые управляющие сигналы соответствующим исполнительным механизмам 12 управления трансмиссией 2, двигателем 1 и тормозной системой 3. Собираемая датчиками информация учитывает характеристики параметров внешней среды и дорожных условий управляющих воздействий водителя скоростных режимов движения транспортного средства особенностей управления транспортным средством,обусловленных стилем вождения и квалификацией водителя степень загрузки транспортного средства допустимые режимы работы двигателя, трансмиссии и тормозной системы пределы безопасных режимов движения транспортного средства в реальных дорожных условиях, характеристики различных ситуаций и другие факторы. Все сигналы и информационные переменные направляются в блок 13, где осуществляется их дифференциация (разделение) на диагностические, контролируемые, информационные и управляющие сигналы. В блоке 14 сигналы описываются функциями принадлежности (процедура фаззификации) методами теории нечетких множеств. На основании базы знаний 15 и базы продукционных правил 16 посредством процедур нечеткой логики в блоке 17 вырабатываются управляющие сигналы(процедура дефаззификации), которые по каналу 18 поступают в блок управления 11. В блоке управления 11 с учетом заложенной в нем базовой программы и корректирующих управляющих сигналов формируется адаптивная программа управления(адаптивные управляющие сигналы), которая отрабатывается исполнительными механизмами 12. 5 11076 1 2008.08.30 На основе собранной и дифференцированной информации в режиме реального времени формируют сигналы, посредством которых в блоках 19 и 20 с применением информационных интеллектуальных технологий вначале осуществляют результат предварительного технического диагноза, который используется, уточняется и проверяется в экспертной базе знаний 21, а затем - результат окончательного технического диагнозао состоянии механизмов транспортного средства с его отображением и визуализацией на информационном дисплее водителя (панели оператора) 22. Для выявления требуемого множества диагностических сигналов и определения их взаимосвязи непосредственно в процессе эксплуатации транспортного средства либо на предварительной стадии осуществляют процедуры 23 имитационного моделирования процессов функционирования механизмов транспортного средства, процедуры 24 корреляционного и регрессионного 25 анализа с последующей формализацией этих сигналов средствами нечеткой логики и использованием этих результатов при получении технического диагноза. При необходимости контролируемые и информационные сигналы могут подвергаться непосредственной визуализации и выводу на дисплей 22 в качестве диагностической информации без их предварительной обработки. Управляющие сигналы после их предварительной обработки в соответствии с алгоритмами интеллектуального управления с применением технологий нечеткой логики и(или) искусственных нейронных сетей могут быть использованы соответствующими исполнительными механизмами транспортного средства для управления процессом переключения ступеней коробки передач, режимами двигателя 1, тормозной системой 3,системой виброзащиты и другими механизмами машины. В случае использования парка машин диагностические, контролируемые, информационные и управляющие сигналы целесообразно сохранять в памяти бортового процессора с возможностью последующей передачи посредством носителей информации в стационарный процессор с экспертной базой знаний для обработки, анализа и получения технического диагноза теми или иными методами. Рассмотрим методологию интеллектуального диагностирования подвижного объекта,основные процедуры которой показаны на фиг. 2. В основе методологии лежит создание системы диагностирования технического объекта. Это многостадийный процесс, который включает несколько этапов. Решение проблемы управления и диагностирования транспортных объектов базируется на всесторонне обоснованной концепции и вытекает из потребностей заказчика и необходимости повышения показателей эффективности и безопасности. В этой связи на первом этапе разрабатывается концепция, представляющая собой комплекс требований к будущей диагностической системе определенного назначения с описанием основ ее функционирования. При этом проводится онтологический анализ, который включает описание объекта и входящих в нее компонентов, разработку понятийного аппарата, описание взаимосвязей и взаимодействия компонентов и т.д. Далее осуществляется структурный синтез диагностической системы,включающий выбор общей структуры, элементного состава, выполняемых функций. На этом этапе решаются следующие вопросы какой должна быть будущая система, какие элементы и блоки она должна включать. После разработки концепции и выбора структуры диагностической системы осуществляется синтез алгоритмов ее функционирования. Методика синтеза алгоритмов управления/диагностирования базируется на современных методах получения, представления,анализа и передачи информации. В основу алгоритма может быть положена некоторая базовая программа управления/диагностирования, которая нуждается в последующей адаптации к непрерывно изменяющимся условиям функционирования системы. В этом случае в процессе синтеза вначале необходимо получить базовую программу, составляющую ядро алгоритма. Затем это ядро дополняется интеллектуальными качествами с применением математического аппарата теории искусственного интеллекта. 11076 1 2008.08.30 На втором этапе осуществляют построение математической модели функционирования объекта диагностирования в условиях внешней среды и различных ситуаций. Здесь же производят выбор требуемого множества диагностических параметров. На третьем, четвертом и пятом этапах моделируют процесс функционирования объекта в различных условиях и выявляют зависимости диагностических параметров от параметров объекта, внешней среды, управляющих воздействий водителя и других факторов. Здесь же строят функциональные зависимости и получают необходимые характеристики диагностических параметров, которые могут быть положены в основу формирования базы знаний интеллектуальной системы. На шестом этапе может проводиться корреляционный анализ полученных зависимостей и выбор минимального набора диагностических параметров. Корреляционный анализ осуществляется на основе оценки корреляционной связи между различными параметрами. На седьмом этапе проводят регрессионный анализ результатов математического моделирования функционирования объекта и получают регрессионные модели, устанавливающие зависимости между принятыми диагностическими параметрами и параметрами программ управления. На восьмом этапе выбирают требуемую технологию искусственного интеллекта (ИИ),которую целесообразно использовать для формирования технического диагноза. Для этих целей, к примеру, может быть использована технология нечеткой логики. На девятом, заключительном, этапе осуществляют вывод решения в соответствии с используемым методом ИИ и получают однозначный технический диагноз в режиме реального времени. При необходимости может производиться оценка эффективности алгоритма и системы диагностирования. Конкретное содержание каждого из этапов зависит от объекта диагностирования и решаемых задач. В качестве объектов диагностирования технического назначения могут служить автотранспортные средства (автомобили и автобусы) и их механизмы, мобильные и гусеничные машины, трактора, строительно-дорожная и специальная техника и т.д. В зависимости от специфики решаемых задач для тех или иных объектов диагностирования некоторые этапы могут отсутствовать или дополняться новыми. Постановка задачи синтеза определяется назначением системы автоматизированного диагностирования и предъявляемыми к ней эксплуатационными требованиями. При выборе метода диагностирования и параметров диагностирования следует учитывать несколько обстоятельств особенности режимов эксплуатации объекта, назначение системы диагностирования, цели и задачи, точность постановки диагноза, возможность его получения в режиме реального времени, характеристики человеческого фактора, степень опасности аварийных и нештатных ситуаций. Процесс адаптации алгоритма диагностирования к реальным условиям функционирования осуществляется на основе большого объема информации. Так, для объектов автомобильного транспорта целесообразно учитывать следующие факторы параметры характеристик дорожных условий внезапные препятствия движению, обусловленные внешней средой и объектами транспортного потока нештатные и опасные дорожные ситуации особенности управления автомобилем, обусловленные стилем вождения уровень загрузки автомобиля параметры скоростных режимов движения реакции автомобиля на управляющие воздействия допустимые скоростные и нагрузочные режимы работы двигателя и механизмов трансмиссии пределы безопасных режимов движения в реальных дорожных условиях. Собираемую информацию отображают соответствующими информационными переменными и диагностическими параметрами. Реализация алгоритма диагностирования возможна с использованием различных технологий ИИ, среди которых нечеткая логика, искусственные нейронные сети, технологии эволюционного моделирования и генетические алгоритмы. Наиболее простыми система 7 11076 1 2008.08.30 ми диагностирования являются традиционные экспертные системы с использованием логических или продукционных моделей. Возможно одновременное использование нескольких технологий ИИ, что приводит к созданию гибридных систем, например нейрофаззисистем, сочетающих технологии нечеткой логики и искусственных нейронных сетей экспертных систем с нечеткой логикой и др. При решении задач определения технического состояния объекта создаются интеллектуальные диагностические системы (ИДС). Одной из важнейших процедур при создании ИДС является формирование ее базы знаний. Выбор той или иной технологии ИИ накладывает определенную специфику на процесс формирования базы знаний ИДС. В качестве примера рассмотрим методику этапа формирования базы знаний ИДС с использованием нечеткой логики. Она включает несколько этапов. 1. Онтологический анализ. 2. Структурный синтез. 3. Формирование нечеткой логики диагностирования. 3.1. Описание функциями принадлежности вводимых из периферийных устройств диагностических параметров. 3.2. Нечеткое моделирование принятия решений. 3.2.1. Формирование продукционных правил. 3.2.2. Использование механизмов нечетких выводов. 3.3. Дефаззификация и получение однозначного выходного решения - диагноза. При составлении и формализации правил нечеткого управления р продукционных правил могут задаваться следующим образом где 1, 2, ,- переменные предпосылок,- переменная заключения, Вр - вывод по правилу(1, ) , А 1, , А - нечеткие множества переменных предпосылок (1, ) . Переменными предпосылокявляются диагностические параметры. Продукционные правила, полученные на основе выражения (1), также могут быть записаны в виде гдеи- нечеткие логические утверждения. В процессе получения выходного решения на основе правил нечеткого управления,включающего этапы фаззификации (преобразование четкого множества в нечеткое) и дефаззификации (приведение к четкости), используются следующие процедуры. 1. Получение нечетких выводов по каждому правилу в отдельности. Для этого построчно по мере расположения нечетких правил выполняется требуемая логическая операция сложения либо умножения нечетких множеств предпосылки для фиксированных значений аргумента. Полученное значение функции принадлежности накладывается на функцию принадлежности заключения. В результате операции слияния этих двух нечетких множеств (логическая операция И, или взятие минимума) получается новая функция принадлежности - результат применения процедуры нечеткой импликации. 2. Сложение результирующих функций, полученных на предыдущем этапе, по всем правилам одновременно. Применяется логическая операция ИЛИ, т.е. берется максимум. В результате формируется результирующая функция принадлежности по всем правилам одновременно. 3. Получение четкого (однозначного) решения - дефаззификация. Полученное в виде числового значения четкое однозначное решение при использовании нечетких систем прямого вывода служит основой для формирования диагноза. 11076 1 2008.08.30 На практике в нечетких контроллерах для одновременного выполнениянечетких выводов обычно устанавливают параллельноблоков нечетких выводов, в которые одновременно вводятся нечеткие правила. Входная информация (диагностические параметры) поступают через периферийные устройства в логический блок (блок нечеткой памяти), где записаны функции принадлежности. Функции принадлежности, описывающие диагностические параметры, могут быть нормированы. Для реализации механизма нечетких выводов на основе правил используются соответствующие процедуры. Формирование нечетких высказываний осуществляется с использованием лингвистических переменных и их функций принадлежности. Моделирование параметров (предпосылок нечетких правил) осуществляется, как правило, на основе алгебраических и тригонометрических функций принадлежности. При моделировании нечетких заключений удобно использовать треугольные и трапециевидные функции принадлежности. Поскольку вывод подзадач осуществляется посредством нечетких правил, а входные данные носят четкий количественный характер, то перед использованием этих данных в качестве фактов перед решением задачи формирования выходных сигналов (т.е. постановки технического диагноза) производят операцию фаззификации. Одной из специфических особенностей ИДС, как и любой интеллектуальной системы,является наличие базы знаний, требующей определенных методов и средств для обработки, представления и использования хранящейся в ней информации. Другой важной особенностью такой системы является то, что она способна на основе полученной извне информации посредством базы знаний сформировать программу диагностирования объекта и найти способ реализации этой программы. Для формирования базы знаний ИДС необходимо располагать определенным объемом достоверных экспериментальных данных. Их можно получить несколькими способами например с помощью группы квалифицированных экспертов (специалистов в конкретной области знаний, инженеров, ученых) либо с помощью проведения комплекса научных исследований. Второй путь формирования базы знаний наиболее достоверный и лишен субъективизма, а иногда, при отсутствии экспериментальных данных, он является и единственно возможным. Естественно, по возможности надо использовать и первый путь, так как он опирается на практические знания и богатый опыт экспертов. Для синтеза базы знаний диагностической системы целесообразно использовать методику, основанную на проведении теоретических исследований технического объекта (мобильной машины, транспортного средства). В процессе формирования необходимых для базы знаний ИДС характеристик и параметров данной методикой предписывается использование математического моделирования, регрессионного анализа, эксперимента, на основе чего извлекается необходимый информационный материал. Далее, располагая полученной информацией и построенными функциональными зависимостями, формируется база знаний ИДС. Например, при использовании теории нечетких множеств в этом случае создаются функции принадлежности, описывающие поведение диагностических параметров, и разрабатываются продукционные правила, регламентирующие получение выходных решений, что описано выше. Данная методика создает предпосылки для разработки интеллектуальной диагностической системы, базирующейся на достоверном фактическом материале, и дает возможность избежания моделирования непосредственно в микропроцессорах и сложного программирования микроконтроллеров. В результате появляется возможность обеспечить диагностирование механизмов объекта в режиме реального времени. Методология интеллектуального диагностирования реализуется в соответствующих алгоритмах и программном обеспечении. Пример алгоритма интеллектуального диагностирования для транспортного средства с гидромеханической передачей представлен на фиг. 3 и 4. Алгоритм содержит следующие основные блоки 11076 1 2008.08.30 1) начала и инициации запуска программы алгоритма 2) базы данных 3) фиксации и преобразования диагностических параметров 4) вычислительных операций 5) логических операций 6) операций диагностирования механизмов автомобиля 7) операций экспертной подсистемы 8) индикации и отображения информации. Программа алгоритма реализуется посредством электронного блока управления и запускается на выполнение периодически с некоторым временным интервалом, равным, например, ц 0,1 с. Блоки инициации и базы данных алгоритма выполняются только один раз при первом запуске программы. В блоке инициации осуществляются операции организации циклического запуска программы на выполнение, а также обнуляются флаги управления работой алгоритма. При запуске программы на выполнение база данных загружается в оперативную память микропроцессора. В базе данных (блок 1) хранятся параметры характеристик управления механизмами машины, параметры механизмов и параметры ограничений, используемые при реализации алгоритма диагностирования. В каждом цикле отработки программы путем опроса датчиков осуществляется фиксация диагностических параметров (блок 2 алгоритма) частоты вращения вала двигателя,турбинного вала гидротрансформатора, выходного вала коробки передач д, т, вв положение привода подачи топлива (педали акселератора) а положение педали тормоза т положение рулевого колеса машины р сигнал индикаторов включения электромагнитов э сигнал о запаздывании срабатывания цилиндров фрикционов коробки передач зс сигнал датчика окончания заполнения цилиндра фрикциона зц сигнал датчика обнаружения фрикционов, включенных в данный момент оф значения давления масла во фрикционах коробки передач и блокирования гидротрансформатора (ГДТ) рф начальный уровень регулирования давления р 1 конечный уровень регулирования давления во фрикционе 2 давление в цилиндре фрикциона на этапе заполнения рц время регулирования давления во фрикционе при переключении передачинформация о степени износа дисков фрикционов д сигнал индикатора неисправности датчика скорости Д номинальный ток управления пропорциональными электромагнитами фрикционов коробки передач ном напряжение и ток на обмотке электромагнитных клапанов эк, эк сигнал индикатора включения основной тормозной системы от сигнал индикатора включения тормозазамедлителя тз сигнал индикатора включения стояночного тормоза ст положение (степень подъема) грузовой платформы п температура масла гидромеханической передачи Тгмп температура двигателя Тд давление масла двигателя рд сигнал индикатора уровня масла в баке м сигнал индикатора уровня подачи топлива ут время задержки формирования нового сигнала управления з давление в цилиндрах подвески п давление в переднем контуре тормозной системы рпк давление в заднем контуре тормозной системы рзк аварийное давление в контуре передних тормозов рап аварийное давление в контуре задних тормозов раз давление рулевого управления ру напряжение бортовой сети б степень засорения воздушных фильтров зф температура охлаждающей жидкости ж положение жалюзи радиатора охлаждения (открыты или закрыты) жр степень загрузки машины з температура масла гидромеханической передачи Ггмп температура двигателя Тд скорость машиныконтроль аварийной лампы Кал контроль ламп степени загрузки Кз сигналы пульта переключения передач и блокирования ГДТ пп и гдт номер включенной передачи кп состояние механизма блокирования ГДТ гдт пробег автомобиляуровень топлива в баке б. Для отображения состояния системы управления автомобилем на информационном табло могут использоваться следующие символы Р - стоянка автомобиля с работающим двигателем- нейтраль в коробке передач- передача реверса- движение на авто 10 11076 1 2008.08.30 матическом режиме переключения передач С - движение на командном режиме. Конфигурация и размеры символов устанавливается в соответствии со стандартом СТБ ИСО 2575-2001. Символ Р выполняется красного цвета, а символы , ,и- зеленого. Информационное табло постоянно содержит информацию о номере включенной передачи и о состоянии блокирования ГДТ. Номер передачи отображается зеленым цветом внутри символа, изображающего шестерню трансмиссии (номер символа Н.11 по стандарту). Аналогичная форма символа для отображения состояния ГДТ в блокированном состоянии символ окрашивается в зеленый цвет, а в неблокированном символ погашен. Рассмотрим работу алгоритма диагностирования (фиг. 3). В каждом цикле осуществляется опрос датчиков и считывание информации о режиме работы машины, состоянии ее органов управления и др. (блок 2). Проверяется общее состояние функционирования механизмов и систем машины (блок 3). В случае если все параметры находятся в допустимых пределах, на дисплее (панели оператора) выдается сообщение о полной исправности машины (блок 5). В случае выхода значений некоторых параметров за допустимые пределы с привлечением базы знаний экспертной системы, которая может быть представлена, например, в декларативной или продукционной форме (в виде логических утверждений), осуществляется поиск механизма или подсистемы, где имеет место неисправное состояние (блок 6). При этом индикатору локализации неисправностей М присваивается определенное значение от 1 до 9, в соответствии с которым диагностируется предположительно неисправный механизм. Если индикатору М присвоено несколько значений, то поиск неисправностей осуществляется одновременно по нескольким ветвям алгоритма. При использовании технологий нечеткой логики в ветви 3 алгоритма (фиг. 4) осуществляется формирование функций принадлежности и описание ими используемых в системе диагностических параметров(1, ,) (блок 26). В блоке 27 формируются логические продукционные правила вида (2)(Если, то) и выбирается метод вывода решений по ним. Далее данная ветвь ожидает предварительных результатов анализа остальных ветвей. При необходимости привлечения дополнительной информации и привлечении новой базы продукционных правил (блок 28) выполняются процедуры в дополнительной ветви алгоритма, помеченной(данная ветвь условно не показана). После поступления предварительной информации от ветви 5 алгоритма (из экспертной подсистемы) в блоке 29 осуществляется вывод решения по правилам и формирование предварительного диагноза( ,),. После сравнения в блоках 30 и 31 полученного диагноза с информацией экспертной системы принимается решение либо об установлении окончательного диагноза с выводом его на дисплей или печать, либо (в случае расхождения диагнозов) об уточнении базы данных нечеткой логики, коррекции продукционных правил, их весовых коэффициентов и характеристик функций принадлежности(ветвь 4 алгоритма, блоки 32-35). При необходимости для этих целей применяется метод экспертных оценок (блок 36). Рассмотрим пример работы системы диагностирования при возникновении неисправностей отдельного механизма. Предположим, на основе анализа базы знаний ИДС выяснила, что предположительно неисправный механизм - тормозная система машины. При этом М 1 (блок 7, страница 1 алгоритма на фиг. 3). Далее процесс диагностирования будет продолжаться по ветви алгоритма, начиная с блока 8 Проверка состояния тормозной системы (страница 3 алгоритма, фиг. 5). После анализа значений диагностических параметров в случае обнаружения их выхода за допустимые пределы в блоке 39 (фиг. 5) осуществляется проверка состояния тормозных механизмов. В случае отрицательного ответа на вопрос блока 40 Значения параметров в 11076 1 2008.08.30 допустимых пределах производится выявление неисправностей тормозных механизмов(блок 41). При этом анализируются возникшие симптомы и распознаются типовые ситуации с привлечением средств и методов нечеткой логики. Например, если в результате анализа идентифицируется симптом Недостаточно эффективное торможение, то далее выполнение процедур алгоритма адресуется к блоку Т-1 экспертной системы, где задекларированы логические утверждения экспертной базы знаний. Этому состоянию соответствуют такие возможные диагнозы, содержащиеся в базе знаний, как Большой износ накладок колодок, Чрезмерный износ тормозных дисков и Недостаток или плохое качество тормозной жидкости. Экспертная система с учетом значений соответствующих диагностических параметров адресует эту информацию ветви 5. Одновременно выполнение процедур отсылается к блоку 3 алгоритма (страница 2,фиг. 4), который инициирует работу блока нечеткой логики. В результате осуществляется вывод решения согласно продукционным правилам, на основе которого формируется предварительный диагноз (блок 29). Этот диагноз в блоке 30 сравнивается с информацией блока Т-1 экспертной системы, и в случае идентичности диагнозов (блок 31) производится вывод информации на дисплей или осуществляется печать результатов в зависимости от требований пользователя. При несовпадении результатов предварительного диагноза в ветви 4 используются расширенные возможности нечеткой логики и производится уточнение базы продукционных правил (блок 32). Если нужно, подвергаются изменению или коррекции функции принадлежности, а также весовые коэффициенты продукционных правил. При необходимости применяются методы экспертных оценок для уточнения базы знаний нечеткой логики (блоки 33-36). По аналогичной схеме работает алгоритм диагностирования и при возникновении любой другой неисправности механизма машины. В качестве примера (страница 4 алгоритма) приведена ветвь для диагностирования трансмиссии (фиг. 6). Количество ветвей алгоритма диагностирования определяется числом диагностируемых механизмов и подсистем транспортного средства. Создание интеллектуальных диагностических систем на основе данного способа диагностирования позволяет решить ряд проблем. Во-первых, появляется возможность создания систем диагностирования, использующих большое количество разнообразной информации. Во-вторых, возникают условия для создания и реализации гибких алгоритмов, позволяющих системам приспосабливаться к изменению различных ситуаций и условий эксплуатации машины. В-третьих, упрощается конструкция систем диагностирования и снижается стоимость создаваемых изделий. В-четвертых и в-пятых, появляются возможности использования и реализации программ диагностирования в режиме реального времени, а также обучения этих систем и пополнения базы знаний. Эксплуатационные испытания опытного образца интеллектуальной системы управления и диагностирования на большегрузном автосамосвале и гусеничной мобильной машине специального назначения подтвердили улучшение показателей эффективности транспортного средства (снижение путевого расхода топлива на 10-12 , увеличение средней скорости движения на 9-11 и повышение производительности на 17-20 ),снижение динамических нагрузок в трансмиссии в 1,6-1,8 раза, значительное повышение безопасности, улучшение условий труда водителя, обеспечение оперативного определения технического состояния основных механизмов (двигателя, трансмиссии, тормозной системы, гидропривода и системы виброзащиты). Источники информации Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B60W 10/00
Метки: способ, управления, диагностирования, средства, транспортного, интеллектуального
Код ссылки
<a href="https://by.patents.su/17-11076-sposob-intellektualnogo-upravleniya-i-diagnostirovaniya-transportnogo-sredstva.html" rel="bookmark" title="База патентов Беларуси">Способ интеллектуального управления и диагностирования транспортного средства</a>
Способ интеллектуального управления энергетическими режимами автотранспортного средства и система для его реализации

Номер патента: 8007
Опубликовано: 30.04.2006
Автор: Рынкевич Сергей Анатольевич
МПК: F16H 61/02, B60K 41/06
Метки: режимами, управления, способ, система, интеллектуального, автотранспортного, средства, реализации, энергетическими
Текст:
...интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и интерпретации информационных сигналов, блок базы данных и правил, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей...
Устройство для диагностирования транспортного средства
Номер патента: 4824
Опубликовано: 30.12.2002
Авторы: Геращенко Василий Васильевич, Яскевич Михаил Яковлевич, Жадик Павел Васильевич, Башаримова Валентина Николаевна, Жадик Александр Васильевич
МПК: B60K 41/00
Метки: средства, транспортного, диагностирования, устройство
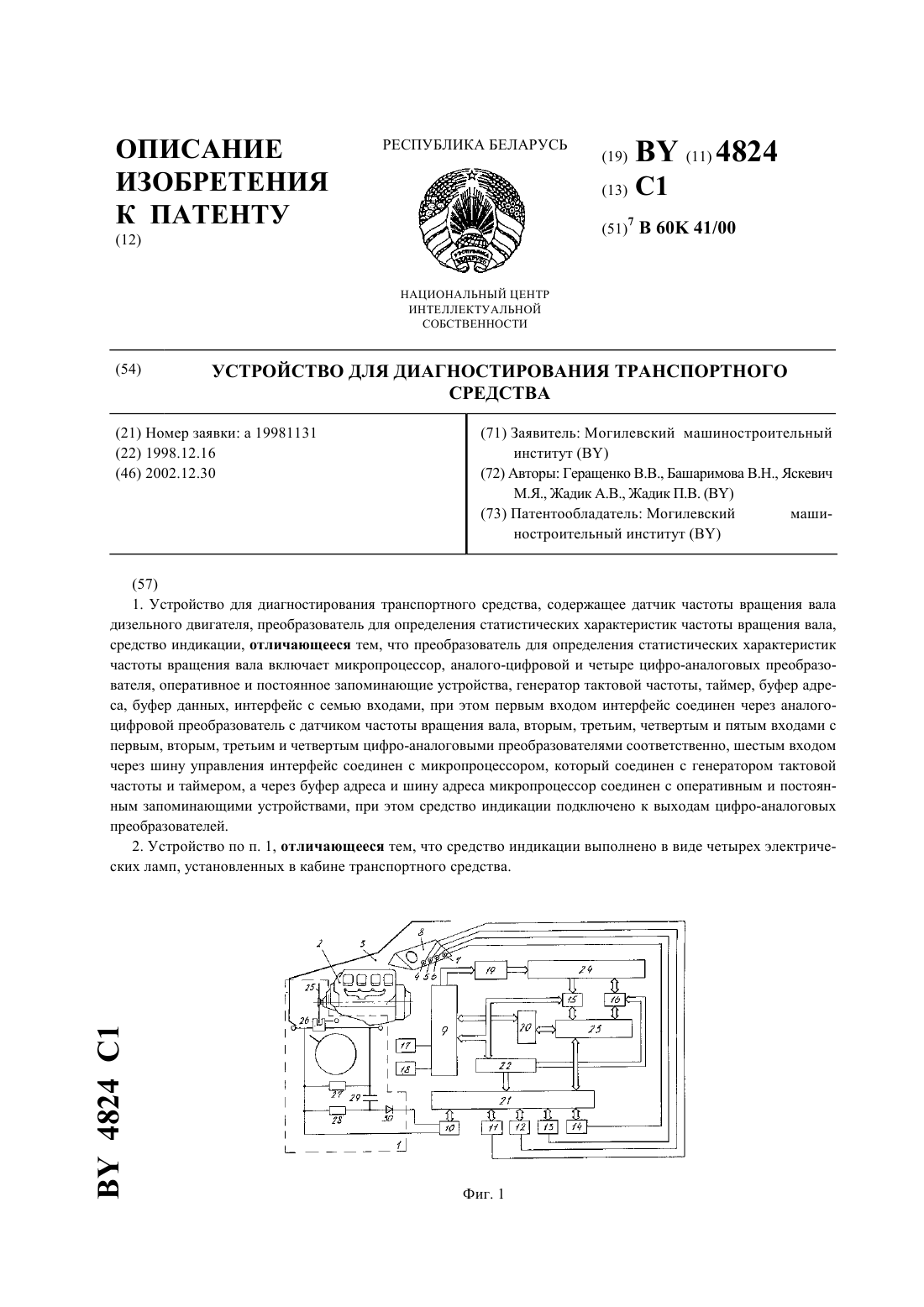
Текст:
...4824 1 преобразователями соответственно, шестым входом через шину управления интерфейс соединен с микропроцессором, который соединен с генератором тактовой частоты и таймером, а через буфер адреса и шину адреса микропроцессор соединен с оперативным и постоянным запоминающими устройствами, при этом средство индикации подключено к выходам цифро-аналоговых преобразователей. Средство индикации выполнено в виде четырех электрических ламп,...
Стенд для диагностирования подвески транспортного средства
Номер патента: 10251
Опубликовано: 28.02.2008
Авторы: Иванчиков Денис Михайлович, Геращенко Василий Васильевич, Жданович Чеслав Иосифович, Бурносенко Андрей Александрович
МПК: G01M 17/00, G01M 17/007
Метки: средства, подвески, стенд, транспортного, диагностирования
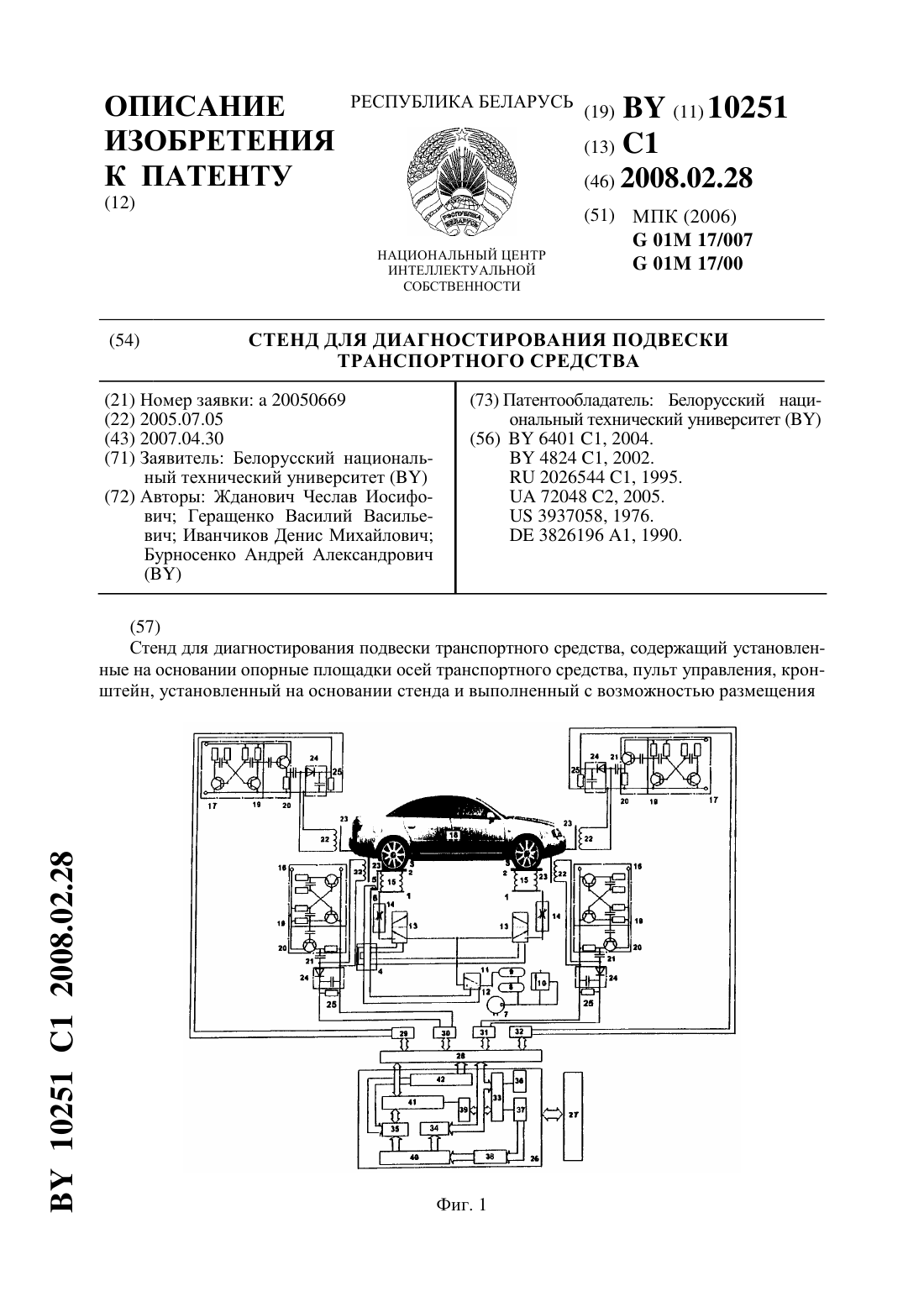
Текст:
...перемещения осей транспортного средства, аналого-цифровые преобразователи сигналов о перемещении осей, аналого-цифровые преобразователи сигналов о перемещении кузова, интерфейс с шестью каналами, микропроцессорную систему обработки сигналов о перемещениях осей и кузова транспортного средства, соединенную с дисплеем, при этом каждый из преобразователей перемещения осей транспортного средства включает последовательно соединенные...
Устройство для диагностирования транспортного средства
Номер патента: 2510
Опубликовано: 30.12.1998
Авторы: Свидерская Людмила Владимировна, Геращенко Василий Васильевич, Рубанова Наталья Владимировна, Яскевич Милаил Яковлевич
МПК: G01M 15/00, B60K 41/00
Метки: средства, диагностирования, транспортного, устройство
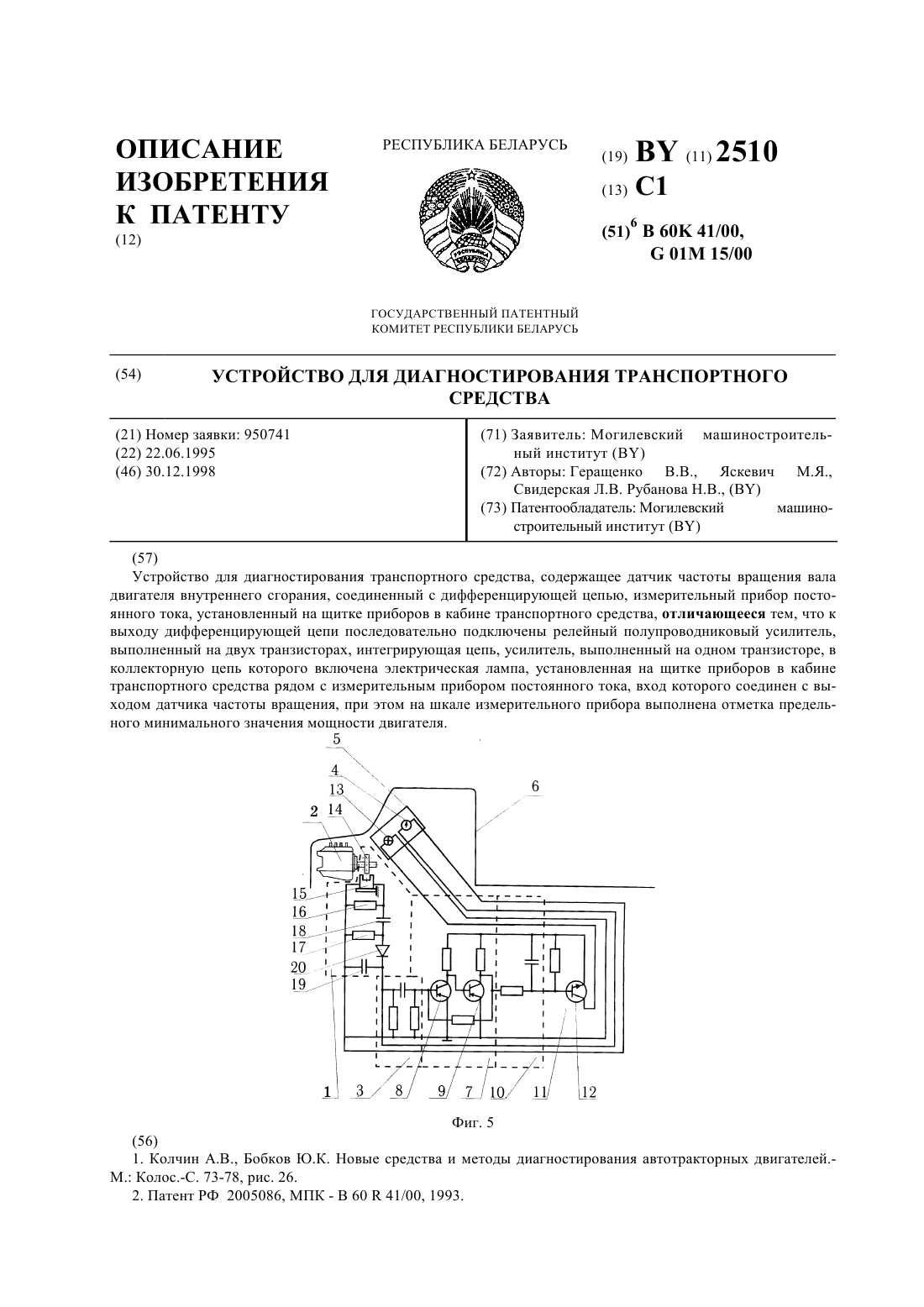
Текст:
...топливной экономичности, а также одновременно снижение затрат на техническое обслуживание и ремонт транспортного средства. Сущность изобретения заключается в том, что в устройстве для диагностирования транспортного средства, содержащем датчик частоты вращения вала двигателя внутреннего сгорания, соединенный с дифференцирующей цепью, измерительный прибор постоянного тока, установленный на щитке приборов в кабине транспортного средства,...
Стенд для диагностирования подвески транспортного средства
Номер патента: 6401
Опубликовано: 30.09.2004
Авторы: Башаримова Валентина Николаевна, Яскевич Михаил Яковлевич, Геращенко Василий Васильевич, Лобанок Иван Васильевич
МПК: G01M 17/04
Метки: средства, диагностирования, стенд, транспортного, подвески
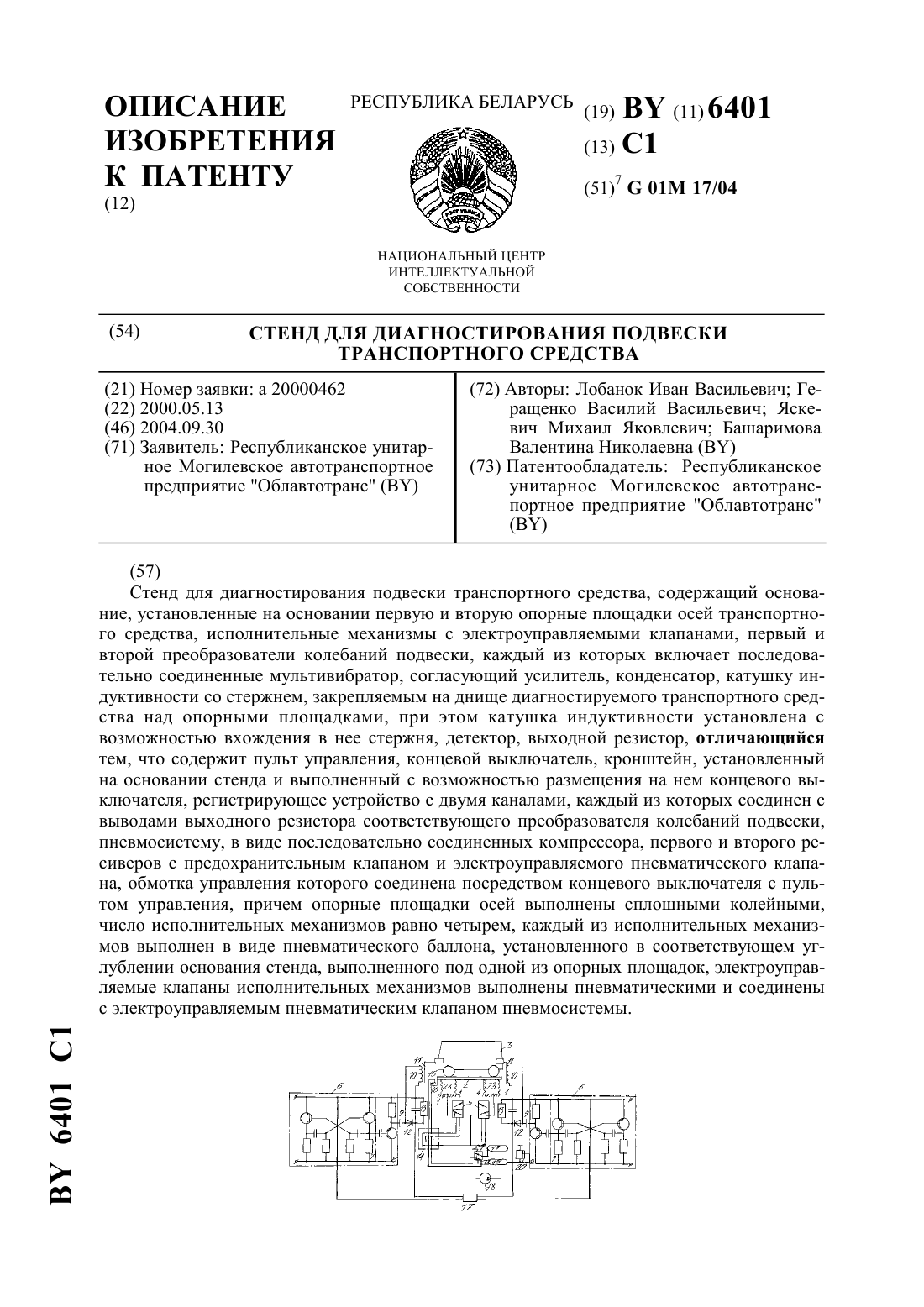
Текст:
...то, что применение его не обеспечивает снижение затрат на эксплуатацию транспортных средств с пневмоподвесками. Объясняется это тем, что на известном стенде обеспечивается только исследование динамических свойств пневмоподвесок транспортных средств путем определения амплитудно-частотных характеристик подвески, а возможность диагностирования подвесок не обеспечивается из-за ограниченных функциональных возможностей стенда. Задачей...
Предыдущий патент: Способ дифференциальной диагностики склеродермии у ребенка
Следующий патент: Электрический нагревательный элемент
Случайный патент: Антисептический раствор для наружного применения