Способ управления фрикционами гидромеханической передачи мобильной машины
Номер патента: 12906
Опубликовано: 28.02.2010
Авторы: Тарасик Владимир Петрович, Горбатенко Николай Николаевич, Дычкин Иван Михайлович
Текст
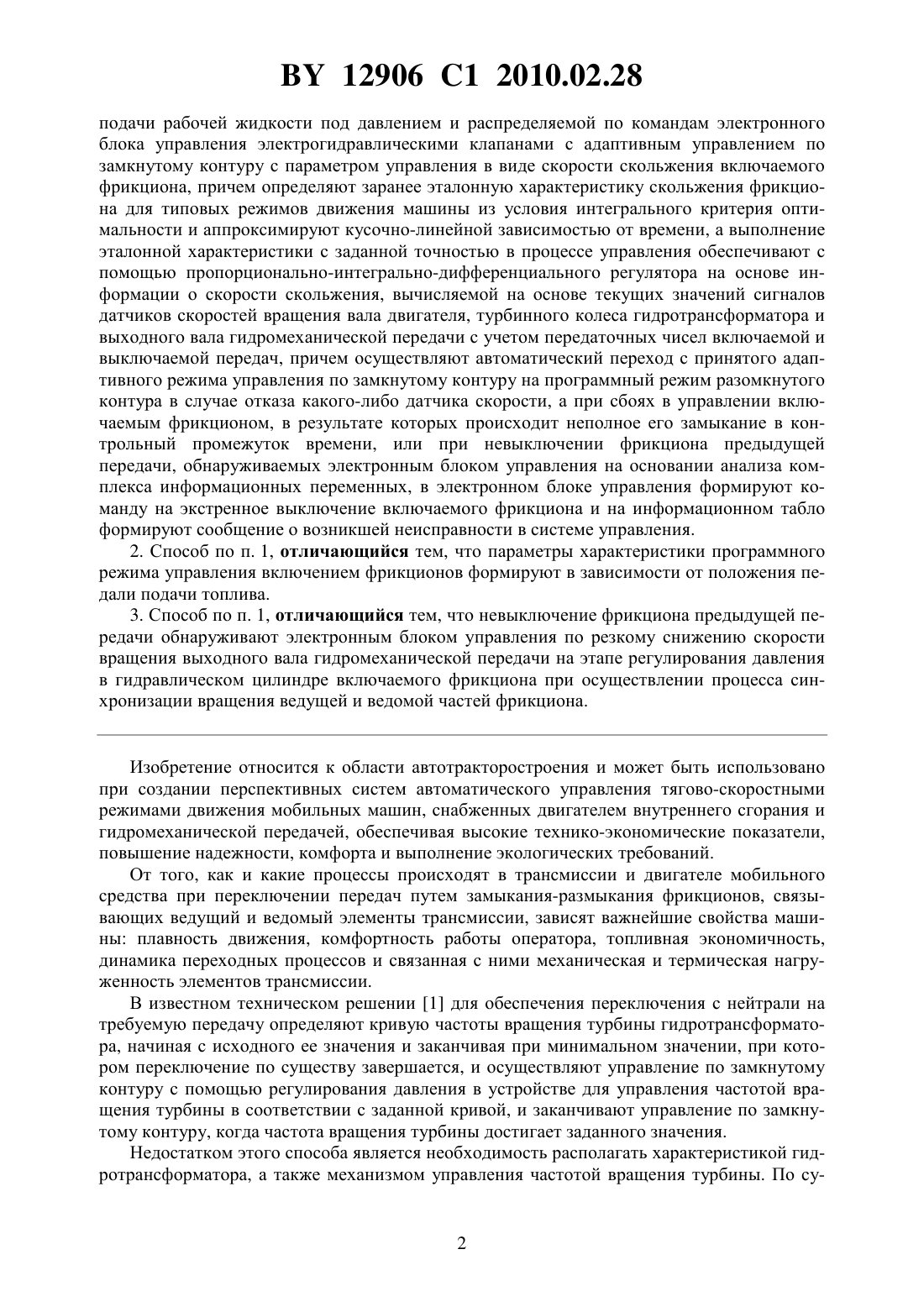
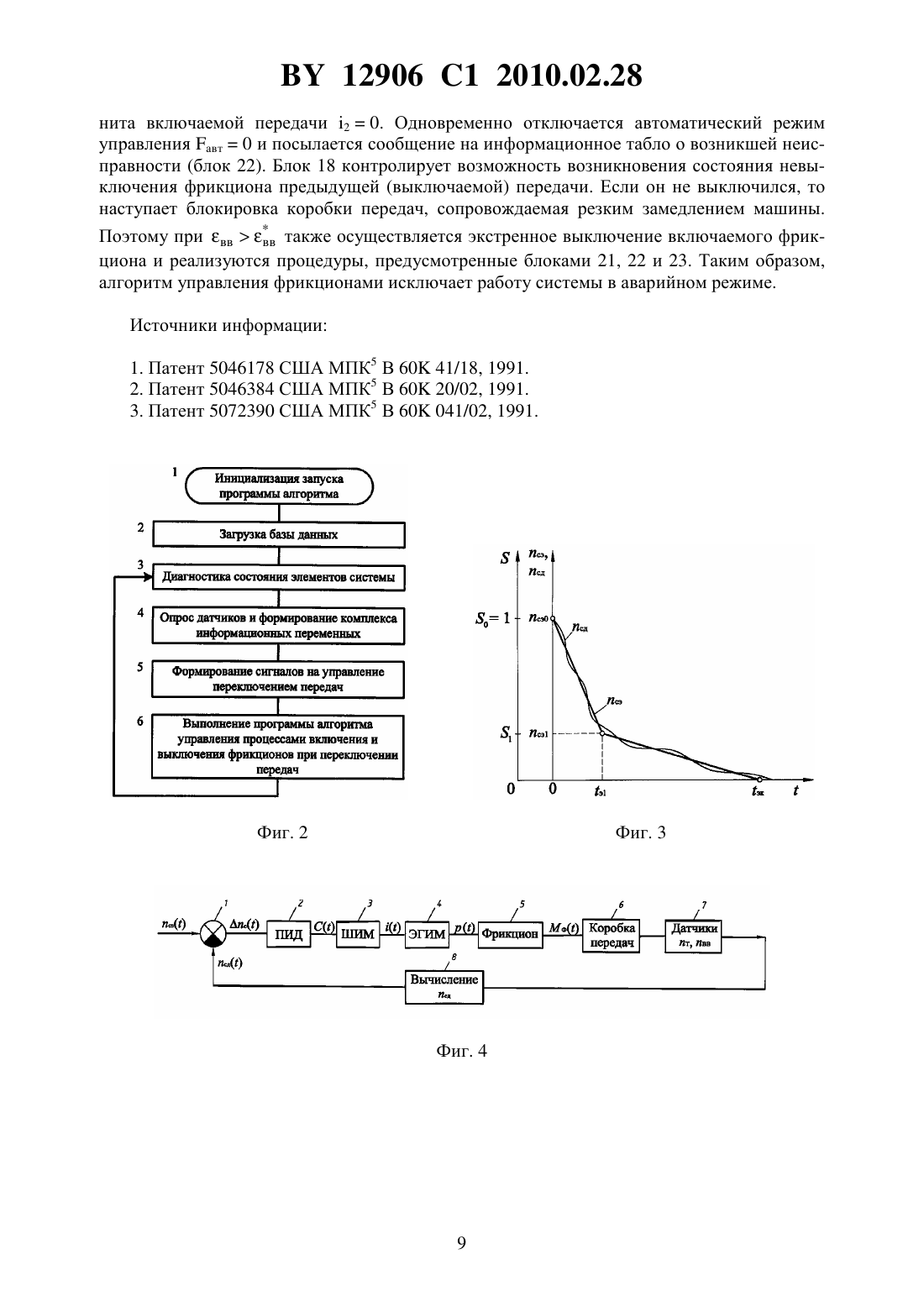
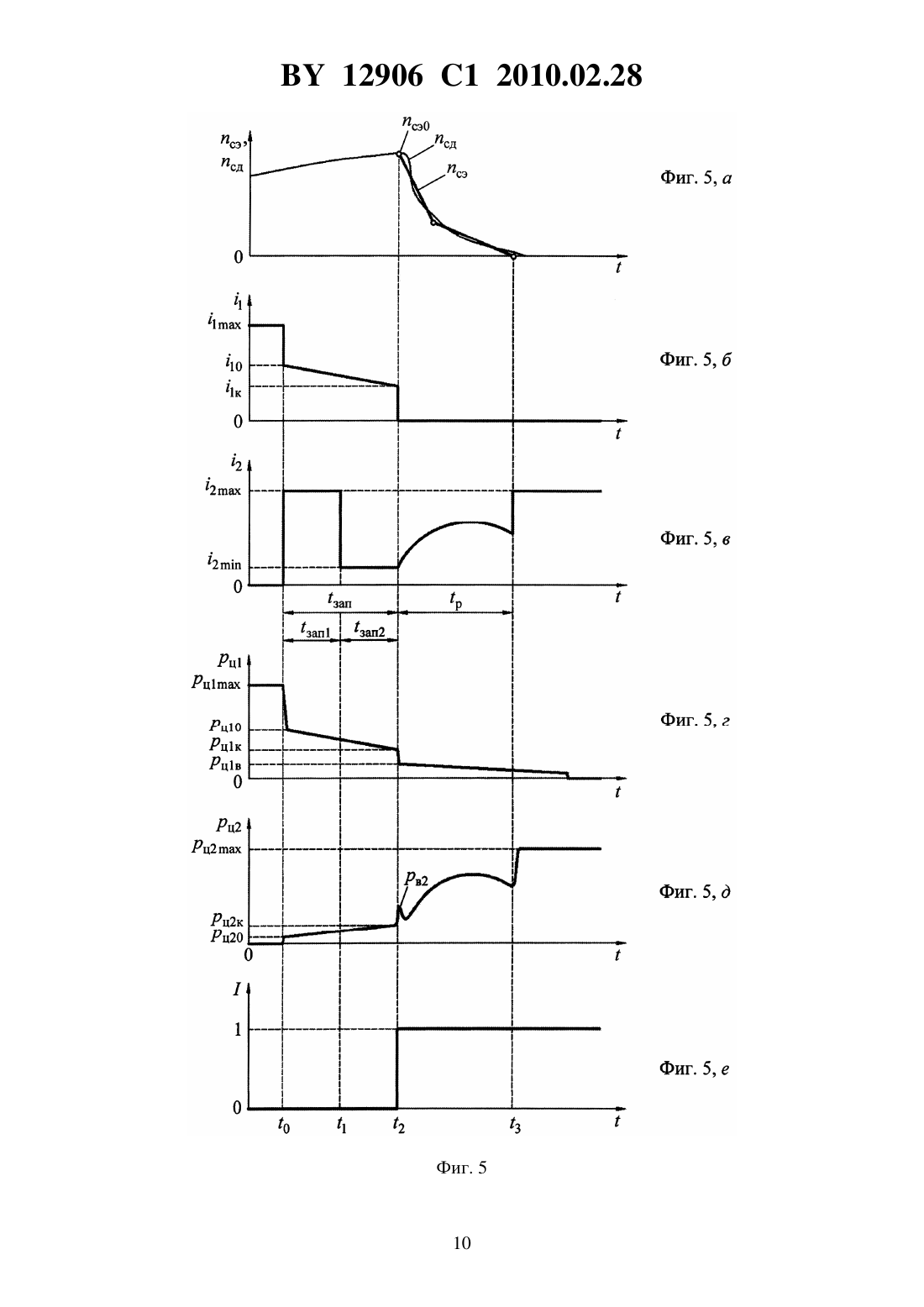
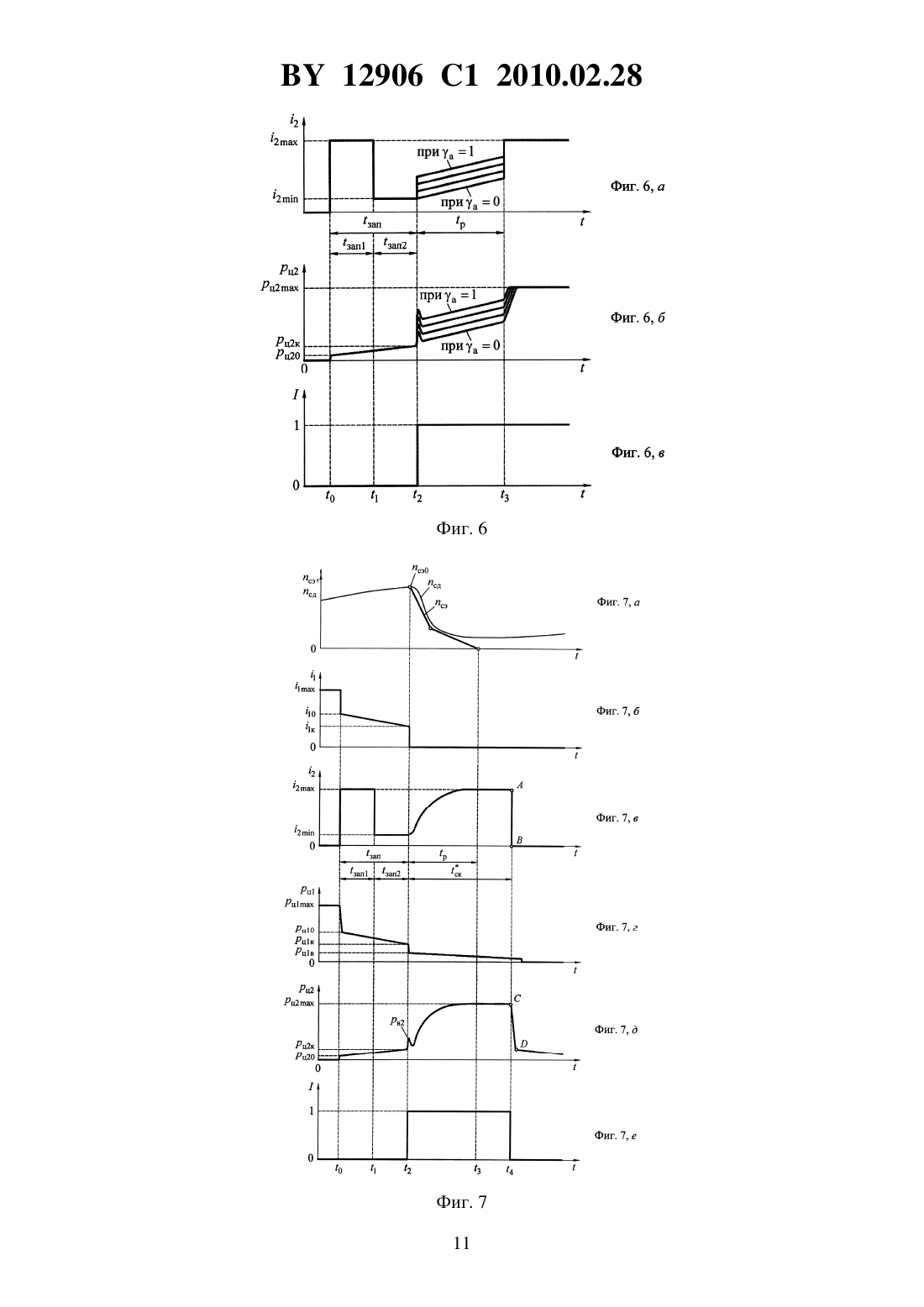
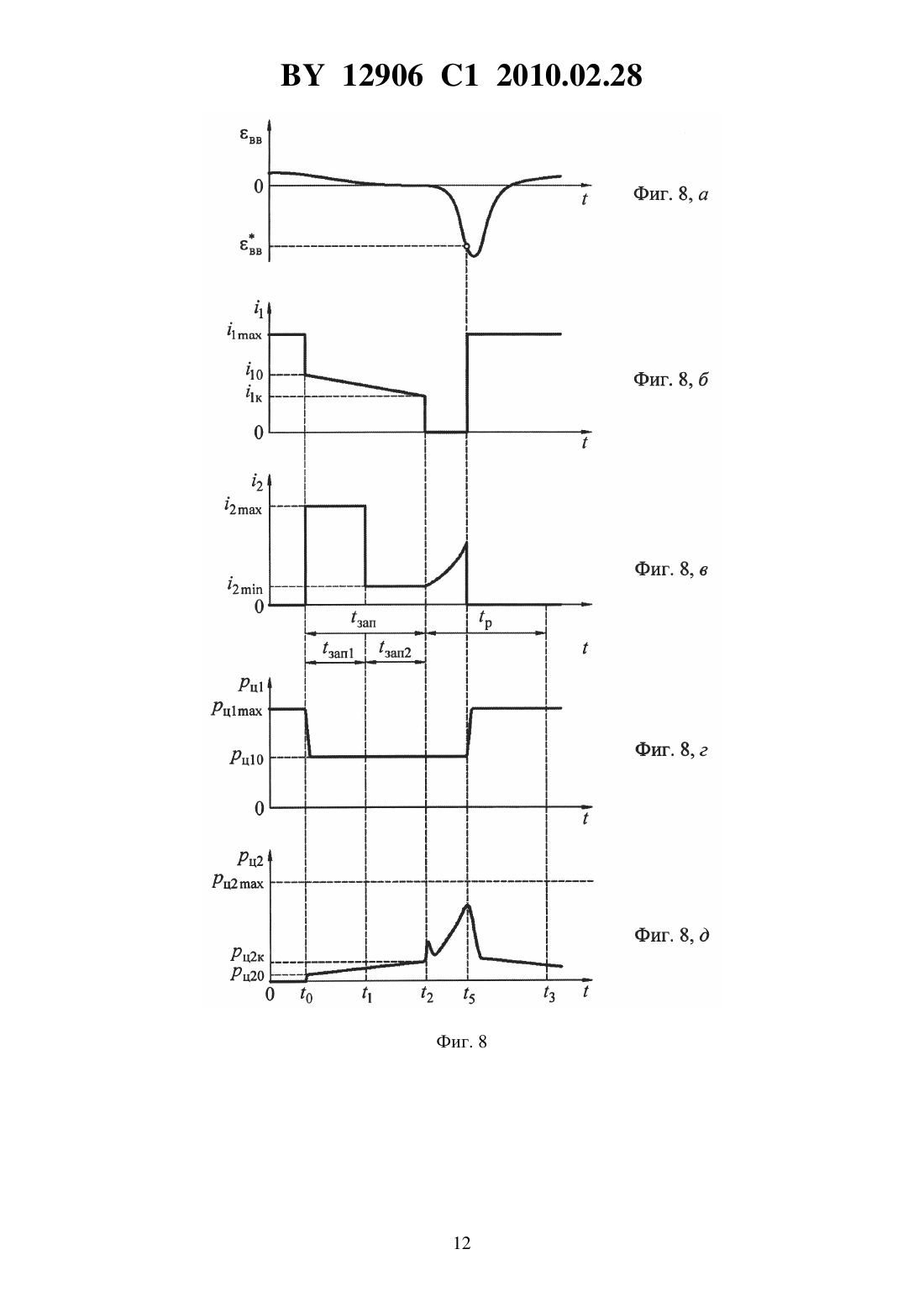
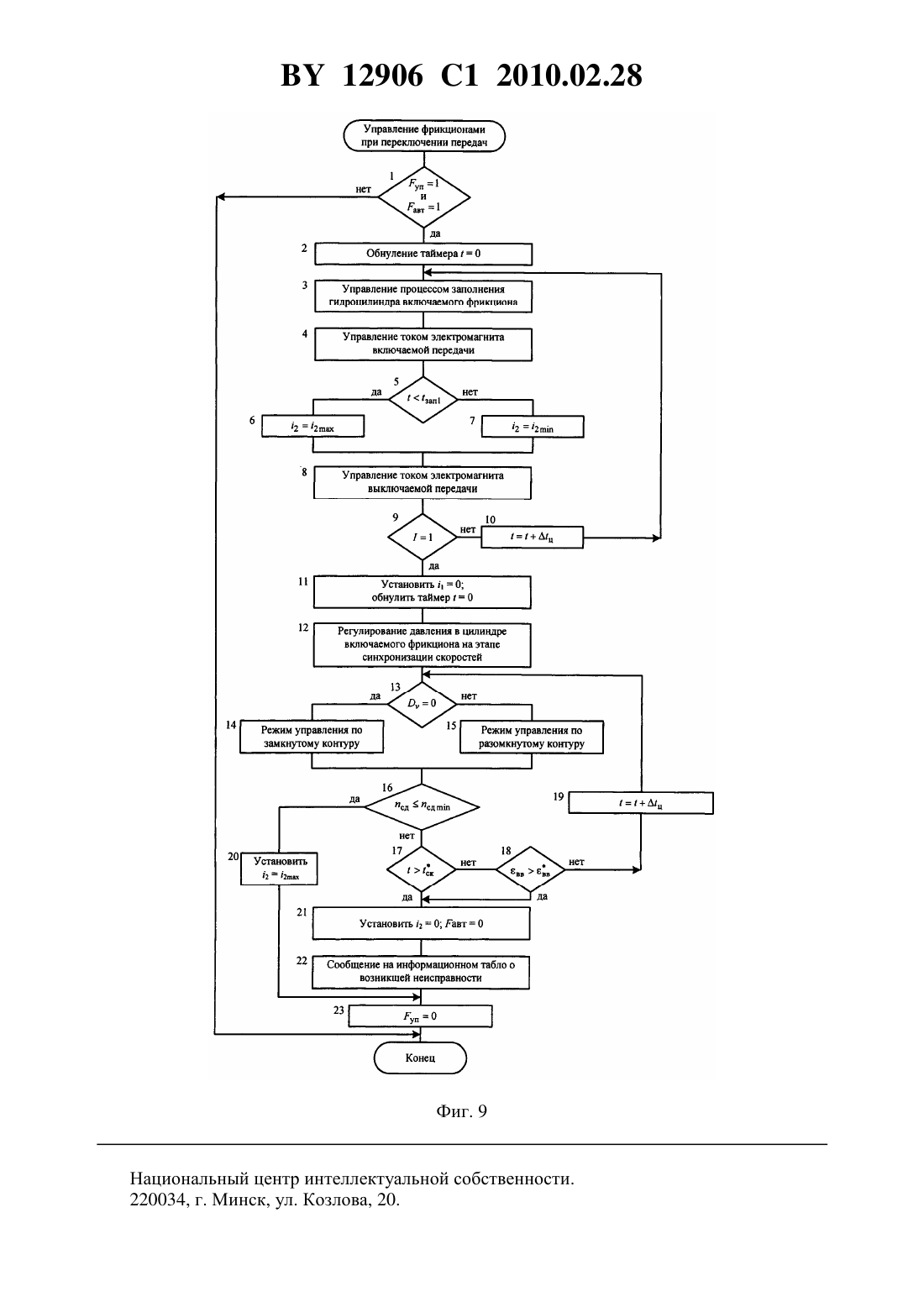
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ФРИКЦИОНАМИ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧИ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Горбатенко Николай Николаевич Дычкин Иван Михайлович(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Способ управления фрикционами гидромеханической передачи мобильной машины,который осуществляют с помощью гидравлических цилиндров посредством соответствующего регулирования давления рабочей жидкости в их полостях, нагнетаемой источником 12906 1 2010.02.28 подачи рабочей жидкости под давлением и распределяемой по командам электронного блока управления электрогидравлическими клапанами с адаптивным управлением по замкнутому контуру с параметром управления в виде скорости скольжения включаемого фрикциона, причем определяют заранее эталонную характеристику скольжения фрикциона для типовых режимов движения машины из условия интегрального критерия оптимальности и аппроксимируют кусочно-линейной зависимостью от времени, а выполнение эталонной характеристики с заданной точностью в процессе управления обеспечивают с помощью пропорционально-интегрально-дифференциального регулятора на основе информации о скорости скольжения, вычисляемой на основе текущих значений сигналов датчиков скоростей вращения вала двигателя, турбинного колеса гидротрансформатора и выходного вала гидромеханической передачи с учетом передаточных чисел включаемой и выключаемой передач, причем осуществляют автоматический переход с принятого адаптивного режима управления по замкнутому контуру на программный режим разомкнутого контура в случае отказа какого-либо датчика скорости, а при сбоях в управлении включаемым фрикционом, в результате которых происходит неполное его замыкание в контрольный промежуток времени, или при невыключении фрикциона предыдущей передачи, обнаруживаемых электронным блоком управления на основании анализа комплекса информационных переменных, в электронном блоке управления формируют команду на экстренное выключение включаемого фрикциона и на информационном табло формируют сообщение о возникшей неисправности в системе управления. 2. Способ по п. 1, отличающийся тем, что параметры характеристики программного режима управления включением фрикционов формируют в зависимости от положения педали подачи топлива. 3. Способ по п. 1, отличающийся тем, что невыключение фрикциона предыдущей передачи обнаруживают электронным блоком управления по резкому снижению скорости вращения выходного вала гидромеханической передачи на этапе регулирования давления в гидравлическом цилиндре включаемого фрикциона при осуществлении процесса синхронизации вращения ведущей и ведомой частей фрикциона. Изобретение относится к области автотракторостроения и может быть использовано при создании перспективных систем автоматического управления тягово-скоростными режимами движения мобильных машин, снабженных двигателем внутреннего сгорания и гидромеханической передачей, обеспечивая высокие технико-экономические показатели,повышение надежности, комфорта и выполнение экологических требований. От того, как и какие процессы происходят в трансмиссии и двигателе мобильного средства при переключении передач путем замыкания-размыкания фрикционов, связывающих ведущий и ведомый элементы трансмиссии, зависят важнейшие свойства машины плавность движения, комфортность работы оператора, топливная экономичность,динамика переходных процессов и связанная с ними механическая и термическая нагруженность элементов трансмиссии. В известном техническом решении 1 для обеспечения переключения с нейтрали на требуемую передачу определяют кривую частоты вращения турбины гидротрансформатора, начиная с исходного ее значения и заканчивая при минимальном значении, при котором переключение по существу завершается, и осуществляют управление по замкнутому контуру с помощью регулирования давления в устройстве для управления частотой вращения турбины в соответствии с заданной кривой, и заканчивают управление по замкнутому контуру, когда частота вращения турбины достигает заданного значения. Недостатком этого способа является необходимость располагать характеристикой гидротрансформатора, а также механизмом управления частотой вращения турбины. По су 2 12906 1 2010.02.28 ществу облегчение условий для включения фрикциона коробки передач происходит за счет нагружения фрикциона блокировки гидротрансформатора. В известном техническом решении 2 описана схема управления автоматической коробкой передач с электронной системой, которая контролирует заранее заданные управляющие параметры переключения передач, выбирает передаточное число коробки передач, соответствующее условиям движения машины, которые характеризуются управляющими параметрами, и вырабатывает первый управляющий сигнал для включения первого фрикционного устройства и второй управляющий сигнал для выключения второго фрикционного устройства. Однако эта схема чувствительна лишь к команде на выключение понижающей передачи. В известном адаптивном управлении 3 автоматической коробкой передач, осуществляемом посредством выключения первого фрикционного устройства и одновременного включения второго фрикционного устройства, для автоматического переключения передач второе фрикционное устройство включают в результате приложения к нему начального гидравлического давления заданного значения, после чего регулируют давление по замкнутому контуру на основе заранее выбранных значений частоты вращения первичного и вторичного валов коробки передач для обеспечения высококачественного переключения, при этом по завершении регулирования по замкнутому контуру давление достигает его конечного значения. Сравнивают разность конечного значения давления и значения давления в начале регулирования по замкнутому контуру с контрольным значением, и если их разность превышает контрольное значение, то изменяют начальное давление на величину, которая является функцией этой разности, так что при следующем переключении величина начального давления будет скорректирована, чтобы достигнуть заранее выбранных значений частоты вращения первичного и вторичного валов. Недостаток этого способа заключается в том, что требуемые регулировочные параметры могут быть достигнуты, по меньшей мере, лишь после одного предварительного переключения, а с учетом постоянного изменения параметров условий движения таких пробных предварительных переключений множество. Любое из них в силу отклонений от оптимального процесса переключения может привести к нежелательным последствиям,например к перегреву фрикциона, поломке деталей трансмиссии и др. Задачей настоящего изобретения является обеспечение высокого качества процесса управления фрикционами гидромеханической передачи мобильной машины и, соответственно, достижение высоких технико-экономических показателей, повышение надежности,комфорта и выполнение экологических требований. Поставленная задача решается тем, что в способе управления фрикционами гидромеханической передачи мобильной машины, который осуществляют с помощью гидравлических цилиндров посредством соответствующего регулирования давления рабочей жидкости в их полостях, нагнетаемой источником подачи рабочей жидкости под давлением и распределяемой по командам электронного блока управления электрогидравлическими клапанами с адаптивным управлением по замкнутому контуру с параметром управления в виде скорости скольжения включаемого фрикциона, причем определяют заранее эталонную характеристику скольжения фрикциона для типовых режимов движения машины из условия интегрального критерия оптимальности и аппроксимируют кусочнолинейной зависимостью от времени, а выполнение эталонной характеристики с заданной точностью в процессе управления обеспечивают с помощью пропорциональноинтегрально-дифференциального регулятора на основе информации о скорости скольжения, вычисляемой на основе текущих значений сигналов датчиков скоростей вращения вала двигателя, турбинного колеса гидротрансформатора и выходного вала гидромеханической передачи с учетом передаточных чисел включаемой и выключаемой передач, причем осуществляют автоматический переход с принятого адаптивного режима управления 3 12906 1 2010.02.28 по замкнутому контуру на программный режим разомкнутого контура в случае отказа какого-либо датчика скорости, а при сбоях в управлении включаемым фрикционом, в результате которых происходит неполное его замыкание в контрольный промежуток времени, или при невыключении фрикциона предыдущей передачи, обнаруживаемых электронным блоком управления на основании анализа комплекса информационных переменных, в электронном блоке управления формируют команду на экстренное выключение включаемого фрикциона и на информационном табло формируют сообщение о возникшей неисправности в системе управления. Согласно изобретению, параметры характеристики программного режима управления включением фрикционов формируют в зависимости от положения педали подачи топлива. Невыключение фрикциона предыдущей передачи обнаруживают электронным блоком управления по резкому снижению скорости вращения выходного вала гидромеханической передачи на этапе регулирования давления в гидравлическом цилиндре включаемого фрикциона при осуществлении процесса синхронизации вращения ведущей и ведомой частей фрикциона. Сущность изобретения поясняется рисунками. На фиг. 1 приведена структурная схема системы управления гидромеханической передачей на фиг 2 - основные процедуры, выполняемые ЭБУ в процессе управления на фиг 3 - графики характеристик скольжения включаемого фрикциона на фиг. 4 - структурная схема управления по замкнутому контуру на фиг. 5 - циклограммы процесса переключения передач при управлении включаемым фрикционом по замкнутому контуру на фиг. 6 - циклограммы процесса управления по разомкнутому контуру на фиг. 7 - циклограммы процессов при сбоях в системе управления на фиг. 8 - циклограммы при невыключении фрикциона предыдущей передачи на фиг. 9 - схема алгоритма управления фрикционами при переключении передач. Система автоматического управления гидромеханической передачей (САУ ГМП) мобильной машины содержит следующие элементы (фиг. 1) двигатель 1, гидротрансформатор 2, коробка передач 3, главная передача 4, ведущие колеса машины 5, источник подачи жидкости под давлением 6 для управления фрикционами гидромеханической передачи,электрогидравлические исполнительные механизмы 7, 8 и 9 САУ ГМП, гидравлические цилиндры 10 и 11 включаемого Ф 1 и выключаемого Ф 2 фрикционов коробки передач, гидравлический цилиндр 12 фрикциона блокировки гидротрансформатора, электронный блок управления (ЭБУ) 13, система датчиков для сбора информации датчик положения педали подачи топлива в двигатель 14 датчик режима управления гидромеханической передачей,выбираемого селектором, 15 датчики частоты вращения двигателя 16, турбинного колеса гидротрансформатора 17 и выходного вала коробки передач 18 система датчиков для учета параметров воздействий внешней среды 19. Схема коробки передач показана фрагментарно, только для двух передач - включаемой и выключаемой, причем фрикцион Ф 1 принадлежит выключаемой передаче, а фрикцион Ф 2 - включаемой. Коробка передач может быть любой кинематической схемы - как вальной, так и планетарной. Основные процедуры, выполняемые ЭБУ в процессе управления, показаны на фиг. 2. После пуска двигателя электронный блок управления осуществляет инициализацию запуска программы алгоритма (блок 1), загружает базу данных (блок 2), диагностирует состояние элементов системы (блок 3) и считывает информацию, доставляемую системой датчиков (блок 4). На основании полученной информации ЭБУ определяет условия, оптимальные для осуществления переключения передачи, и выдает сигнал на организацию переключения (блок 5). По этому сигналу запускается программа управления процессами включения и выключения соответствующих фрикционов коробки передач (блок 6). Программа управления процессами включения и выключения фрикционов предусматривает два режима управления адаптивный режим по замкнутому контуру и программный режим разомкнутого контура. Адаптивный режим управления фрикционами по замкнутому контуру требует наличия полного объема информации о скоростях вращения двигателя, турбины гидротрансформатора и выходного вала коробки передач. При отказе 4 12906 1 2010.02.28 какого-либо датчика скорости ЭБУ автоматически переходит на реализацию программного режима управления по разомкнутому контуру. Это обеспечивает высокую надежность функционирования системы автоматического управления при любом состоянии датчиков САУ ГМП. Параметром управления на режиме замкнутого контура служит скольжение фрикциона . Эталонную характеристику скольженияполучают заранее для типовых режимов движения машины из условия интегрального критерия оптимальности,учитывающего ряд компромиссных показателей качества процесса включения фрикциона удельной мощности трения, удельной работы трения, объемной и поверхностной температуры нагрева фрикционных элементов, динамических нагрузок в трансмиссии, показателей плавности движения автомобиля при переключении передач и др. Эталонную характеристику скольжения фрикционов аппроксимируют кусочно-линейной зависимостью (фиг. 3). Скольжение фрикциона- безразмерная величина, вычисляемая из соотношения сэ/сэ 0,где сэ - изменение скорости скольжения фрикциона во времени (фиг. 3) в соответствии с принятой эталонной характеристикойсэ 0 - начальное значение скорости скольжения фрикциона, определяемое в начальной точке регулирования давления в гидравлическом цилиндре включаемого фрикциона. Действительная скорость скольжения фрикциона сд отклоняется от эталонной сэ(фиг. 3) на величину ссдсэ. Значение сд ЭБУ вычисляет по информации, поступающей от датчиков частоты вращения турбины гидротрансформатора т и выходного вала коробки передач вв с учетом передаточных чисел зубчатых механизмов коробки передач, расположенных между турбиной и включаемым фрикционом тф, а также между включаемым фрикционом и выходным валом коробки передач фвв. Вычисление сд осуществляют по формуле сдтввфвв, тф где т - частота вращения турбины гидротрансформатора, об/мин вв - частота вращения выходного вала коробки передач, об/мин. Величина с определяет погрешность выполнения эталонной характеристики скольжения. Минимизация погрешности в процессе адаптивного режима управления процессом включения фрикциона по замкнутому контуру обеспечивается с помощью ПИДрегулятора. На вход сумматора 1 (фиг. 4) поступают сигналы об изменении эталонной сэ и действительной сд скоростей скольжения включаемого фрикциона. Сумматор вычисляет отклонение с, на основе которого ПИД-регулятор (блок 2) определяет необходимое значение скважностиэлектрического широтно-импульсного сигнала в виде тока , необходимого для уменьшения величины с. Сигналсо скважностью, формируемый широтно-импульсным модулятором ШИМ (блок 3), поступает на электрогидравлический исполнительный механизм ЭГИМ (блок 4), на выходе которого получают сигналв виде давления рабочей жидкости. Рабочая жидкость под давлением поступает в гидравлический цилиндр фрикциона (блок 5), который развивает момент трения Мф, обеспечивающий процесс синхронизации ведущей и ведомой частей включаемого фрикциона коробки передач (блок 6). Система датчиков (блок 7) определяет скорость вращения турбины т и выходного вала коробки передач вв, на основе которых ЭБУ вычисляет действительную скорость скольжения фрикциона сд (блок 8). На фиг. 5, а - 5, е показаны циклограммы процесса переключения передач, иллюстрирующие изменение основных параметров. Параметры выключаемого фрикциона имеют индексы 1, а включаемого - индексы 2. Сигнал на переключение передач подается в момент времени 0. В течение времени зап происходит заполнение гидравлического цилиндра 5 12906 1 2010.02.28 включаемого фрикциона, а интервал времени регулирования давления в гидравлическом цилиндре и синхронизации скоростей ведущей и ведомой частей включаемого фрикциона обозначен р. На фиг. 5, а показана эталонная характеристика скольжения сэ (жирная линия) и характеристика изменения действительной скорости скольжения фрикциона сд(тонкая линия). Момент трения фрикциона возникает только в период времени , тогда и происходит процесс синхронизации вращения ведущей и ведомой частей включаемого фрикциона. При подаче сигнала управления в момент времени 0 ШИМ выключаемого фрикциона уменьшает скважность и сила тока в обмотке электромагнита резко падает от 1 до 10 и затем в течение интервала времени зап медленно уменьшается до величины 1 к(фиг. 5, б). Так как время заполнения гидравлического цилиндра включаемого фрикциона зап зависит от множества факторов (частоты вращения двигателя, подачи гидравлического насоса, температуры рабочей жидкости и др.), то задается скорость снижения силы тока 1,а значение 1 к зависит от зап. В соответствии с изменением силы тока 1 на интервале времени 0-2 происходит изменение давления в гидравлическом цилиндре выключаемого фрикциона ц 1 (фиг. 5, г). На электромагнит включаемого фрикциона в момент времени 0 подается максимальное напряжение, и возникающая величина максимальной силы тока 2 выдерживается в течение интервала времени зап 1 (фиг. 5, в). Это обеспечивает поддержание высокого уровня давления рабочей жидкости на выходе электрогидравлического исполнительного механизма, что способствует быстрому заполнению гидравлического цилиндра включаемого фрикциона на начальном этапе. Окончательный этап заполнения в течение интервала времени зап 2 происходит при меньшем давлении, что способствует снижению кинетической энергии поступающей в гидравлический цилиндр жидкости и снижает величину всплеска давления в 2, возникающего после завершения процесса заполнения цилиндра (фиг. 5, д). Значения давлений ц 20 и ц 2 к определяются усилиями возвратных пружин поршня гидравлического цилиндра фрикциона. Всплеск давления в 2 вызывает срабатывание индикатора заполнения гидравлического цилиндра включаемого фрикциона, и он выдает дискретный сигнал 1 (фиг. 5, е), по которому ЭБУ запускает программу адаптивного регулирования давления по замкнутому контуру. Это соответствует моменту времени 2. В этот момент отключается электромагнит выключаемого фрикциона (10, фиг. 5, б) и вступает в работу ПИД-регулятор, который посредством изменения скважности ШИМ, а следовательно, и силы тока в обмотке электромагнита включаемого фрикциона 2 обеспечивает регулирование давления в гидравлическом цилиндре включаемого фрикциона в течение заданного времени регулирования р (фиг. 5, д) таким образом, чтобы минимизировать ошибку параметра управления - величину отклонения действительной скорости скольжения сд относительно эталонной скорости сэ, т.е. минимизировать значение ссдсэ. После достижения действительной скорости скольжения сд некоторой наперед заданной минимальной величины сд (обычно в пределах 5 об/мин) ЭБУ выдает команду на увеличение силы тока 2 до максимального значения 2, что приводит к выходу на максимальный уровень давления в гидравлическом цилиндре включаемого фрикциона ц 2(фиг. 5, д) и его полному замыканию. Управление включением фрикциона блокировки гидротрансформатора осуществляется аналогично. При этом действительную скорость скольжения фрикциона вычисляют по формуле сддт,где д - частота вращения вала двигателя т - частота вращения турбины гидротрансформатора. Графики процесса включения фрикциона блокировки гидротрансформатора подобны графикам на фиг. 5, а, в, д, е. 12906 1 2010.02.28 Адаптивный режим управления фрикционами по замкнутому контуру реализуется только при условии получения достоверной информации с датчиков частоты вращения двигателя, турбины гидротрансформатора и выходного вала коробки передач. В случае отказа какого-либо из этих датчиков система управления автоматически переходит на программный режим управления по разомкнутому контуру. Циклограммы процесса включения фрикциона для этого случая показаны на фиг. 6, а - 6, в. На этапе заполнения гидравлического цилиндра включаемого фрикциона (интервал времени зап) ток в обмотке электромагнита 2 (фиг. 6, а) и давление в гидравлическом цилиндре ц 2 (фиг. 6, б) изменяются так же, как и на режиме управления по замкнутому контуру, а на этапе регулирования давления при синхронизации скоростей ведущей и ведомой частей включаемого фрикциона (интервал времени р) параметры характеристик 2 и ц 2 зависят от координаты положения педали акселераторачем больше значение , т.е. чем сильнее нажата педаль акселератора, тем выше значения 2 и ц 2 (фиг. 6, а и 6, б). Это дает возможность адаптировать характеристику момента трения включаемого фрикциона ф к изменению вращающего момента на турбине гидротрансформатора т, значение которого зависит от величины . В результате обеспечиваются условия гарантированного замыкания фрикциона за период р регулирования давления ц 2. При сбоях в управлении переключением передач (нарушение программы алгоритма управления в ЭБУ или в работе электрогидравлического исполнительного механизма) замыкания включаемого фрикциона за время р не происходит и его скольжение продолжается (фиг. 7, а). Это может привести к перегреву фрикциона и выходу его из строя. Поэтому, если в течение заданного контрольного временизначение скорости скольск жения сд не достигает минимально необходимой для полного замыкания включаемого фрикциона величины сд, электронный блок управления выдает команду на немедленное его выключение при этом 20 (линия АВ на фиг. 7, в), гидравлический цилиндр фрикциона соединяется со сливом, давление ц 2 в нем падает (линияна фиг. 7, д),фрикцион размыкается и в коробке передач устанавливается нейтральное состояние. Информация о возникшей неисправности передается на информационное табло, режим автоматического управления отключается и в этом случае возможен только режим ручного(командного) управления. Если при включении фрикциона Ф 2 включаемой передачи не произойдет выключения фрикциона Ф 1 предыдущей передачи (фиг. 1), то зубчатые механизмы обеих передач образуют замкнутый контур и блокируют коробку передач, что приведет к резкому снижению скорости вращения выходного вала и торможению мобильной машины. В этом случае ЭБУ вырабатывает команду на экстренное выключение включаемого фрикциона и передает информацию о возникшей неисправности на информационное табло. Режим автоматического управления отключается, а в коробке передач остается включенной предыдущая передача. Циклограммы процессов функционирования системы управления для этого случая показаны на фиг. 8, а - 8, д. Так как фрикцион предыдущей передачи не выключился, то в его гидравлическом цилиндре поддерживается некоторый уровень давления ц 10 (фиг. 8, г). График изменения тока в обмотке электромагнита выключаемой передачи 1 на интервале времени 0-5 показан в предположении адекватного выполнения электронным блоком программы управления (фиг. 8, б). После заполнения гидравлического цилиндра включаемого фрикциона на интервале времени 2-5 в нем происходит нарастание давления, определяемое работой адаптивного алгоритма управления по замкнутому контуру (фиг. 8, д). Однако из-за невыключения фрикциона предыдущей передачи начинается блокирование зубчатых механизмов коробки передач и возникает резкое замедление вращения ее выходного вала вв (фиг. 8, а). При достижении заданного предельного значения замедленияЭБУ выдает команду на экстренное выключение вв включаемого фрикциона при этом 20 (фиг. 8, в), гидравлический цилиндр фрикциона 7 12906 1 2010.02.28 соединяется со сливом, давление ц 2 в нем падает (фиг. 8, д) и фрикцион выключается. Одновременно ЭБУ устанавливает максимальное значение тока в обмотке электромагнита предыдущей передачи 11 (фиг. 8, б), что приводит к восстановлению полного давления в гидравлическом цилиндре фрикциона этой передачи ц 1 ц 1 (фиг. 8, г). На фиг. 9 показана схема алгоритма реализации программы управления фрикционами при переключении передач. В блоке 1 производится проверка включения режима автоматического управления авт и наличия сигнала уп на переключение передач. Если включен автоматический режим (авт 1) и сформирован сигнал на переключение передач (уп 1),то ЭБУ осуществляет выполнение программы управления фрикционами коробки передач. В блоке 2 обнуляется таймер, и далее выполняются процедуры управления включаемым и выключаемым фрикционами в течение времени заполнения гидроцилиндра зап включаемого фрикциона (блоки 3-10). При управлении током электромагнита включаемой передачи (блок 4) проверяется условиезап 1 (блок 5) и при его выполнении в обмотке электромагнита устанавливается ток 22 (блок 6). Значение зап 1 - это время быстрого заполнения гидравлического цилиндра включаемого фрикциона, поэтому максимальная величина тока 2 обеспечивает поддержание высокого уровня давления на выходе электрогидравлического исполнительного механизма. По истечении времени зап 1, т.е. призап 1, величина тока снижается до значения 22 (блок 7), и заполнение гидравлического цилиндра заканчивается при меньшем давлении. Одновременно осуществляется управление током электромагнита выключаемой передачи (блок 8), обеспечивающее постепенное снижение давления в гидравлическом цилиндре выключаемого фрикциона(фиг. 5, г). В блоке 9 (фиг. 9) происходит проверка завершения процесса заполнения гидравлического цилиндра включаемого фрикциона. Процесс контролируется датчиком заполнения. Пока цилиндр не заполнен, дискретный сигнал на выходе датчика 0(фиг. 5, е), поэтому циклически с шагом ц по времени (блок 10) выполняются процедуры блоков 3-9. Когда гидравлический цилиндр включаемого фрикциона заполнится, в нем произойдет всплеск давления (в 2 - на фиг. 5, д), сработает датчик индикатора заполнения и выдаст дискретный сигнал 1 (фиг. 5, ). По этому сигналу в блоке 11 (фиг. 9) обмотка электромагнита выключаемого фрикциона обесточивается (10), давление в его гидравлическом цилиндре падает (фиг. 5, г) и он выключается. Одновременно в блоке 11 обнуляется таймер и начинается управление процессом регулирования давления в цилиндре включаемого фрикциона (блок 12). Проверяется состояние датчиков частоты вращения двигателя д, турбины гидротрансформатора т и выходного вала коробки передач вв. Если датчики исправны, то электронный блок формирует сигнал 0 (блок 13) и по этому сигналу запускает программу адаптивного режима управления включением фрикциона по замкнутому контуру (блок 14). При отказе любого из указанных датчиков частоты вращения возникает сигнал 1 и тогда запускается программа режима управления по разомкнутому контуру (блок 15). Процедуры блоков 14 и 15 выполняются циклически с шагом ц по времени(блок 19). При этом проверяется условие завершения синхронизации включаемого фрикциона сдсд (блок 16). При выполнении этого условия в обмотке электромагнита включаемого фрикциона устанавливается максимальная величина силы тока 22 (блок 20), в блоке 23 обнуляется сигнал управления уп 0 и программа управления фрикционами завершает свою работу. Контроль нормального процесса функционирования системы автоматического управления осуществляется путем проверки полного замыкания включаемого фрикциона в заданный контрольный промежуток времени(блок 17) и проверки выключения ск фрикциона предыдущей передачи (блок 18). Если, то это означает, что включаемый ск фрикцион не замкнулся за установленный предельный интервал времении его следует ск немедленно выключить, что и выполняется в блоке 21 путем обесточивания электромаг 8 12906 1 2010.02.28 нита включаемой передачи 20. Одновременно отключается автоматический режим управления авт 0 и посылается сообщение на информационное табло о возникшей неисправности (блок 22). Блок 18 контролирует возможность возникновения состояния невыключения фрикциона предыдущей (выключаемой) передачи. Если он не выключился, то наступает блокировка коробки передач, сопровождаемая резким замедлением машины. Поэтому при ввтакже осуществляется экстренное выключение включаемого фриквв циона и реализуются процедуры, предусмотренные блоками 21, 22 и 23. Таким образом,алгоритм управления фрикционами исключает работу системы в аварийном режиме. Источники информации 1. Патент 5046178 США МПК 5 В 60 41/18, 1991. 2. Патент 5046384 США МПК 5 В 60 20/02, 1991. 3. Патент 5072390 США МПК 5 В 60 041/02, 1991. Фиг. 9 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 13
МПК / Метки
МПК: B60W 10/02, B60W 10/10
Метки: гидромеханической, способ, машины, передачи, фрикционами, управления, мобильной
Код ссылки
<a href="https://by.patents.su/13-12906-sposob-upravleniya-frikcionami-gidromehanicheskojj-peredachi-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ управления фрикционами гидромеханической передачи мобильной машины</a>
Устройство управления фрикционами автоматической гидромеханической передачи
Номер патента: 10960
Опубликовано: 30.08.2008
Авторы: Кузнецов Сергей Владимирович, Кусков Константин Николаевич, Горбатенко Николай Николаевич, Рынкевич Сергей Анатольевич, Пузанова Ольга Владимировна, Тарасик Владимир Петрович
МПК: B60W 10/10, F16D 29/00, F16H 61/06...
Метки: автоматической, гидромеханической, управления, фрикционами, устройство, передачи
Текст:
...гидролинии с дросселем соединена с торцовой полостью дроссельного гидрораспределителя, при этом электрогидравлический пропорциональный клапан выполнен с возможностью формирования гидравлического сигнала для управления дроссельным гидрораспределителем, а электронный блок управления выполнен с возможностью регулирования давления в гидравлическом цилиндре фрикциона по заданной характеристике, например линейной, путем изменения величины силы тока...
Способ адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей
Номер патента: 11676
Опубликовано: 28.02.2009
Авторы: Дычкин Иван Михайлович, Тарасик Владимир Петрович, Плякин Роман Владимирович, Пузанова Ольга Владимировна
МПК: B60W 10/00
Метки: гидромеханической, дизельным, мобильной, автоматического, двигателем, способ, движения, тягово-скоростными, управления, передачей, машины, адаптивного, режимами
Текст:
...автоматизированного управления переключением передач, обеспечивающих высокие показатели тягово-скоростных свойств мобильной машины с соответствующей нагрузкой в конкретных дорожных условиях. Регрессионные модели представляют собой простые алгебраические выражения и их использование в программе алгоритма управления существенно упрощает обработку и анализ информации о текущих значениях параметров движения машины и выработку информационных...
Способ адаптивного автоматического управления трансмиссией мобильной машины
Номер патента: 10202
Опубликовано: 28.02.2008
Авторы: Кузнецов Сергей Владимирович, Горбатенко Николай Николаевич, Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич, Тарасик Владимир Петрович, Пузанова Ольга Владимировна
МПК: B60W 10/00
Метки: мобильной, автоматического, способ, управления, адаптивного, трансмиссией, машины
Текст:
...Этого можно достичь предварительным моделированием движения мобильной машины во всем многообразии возможных условий эксплуатации. Оперативное управление трансмиссией мобильной машины возможно при минимизации логических и вычислительных процедур. Способ 3 10202 1 2008.02.28 предполагает определение моментов переключения передач и блокирования/разблокирования гидротрансформатора на основе организации логической процедуры выбора регрессионных...
Способ интеллектуального управления энергетическими режимами мобильной машины
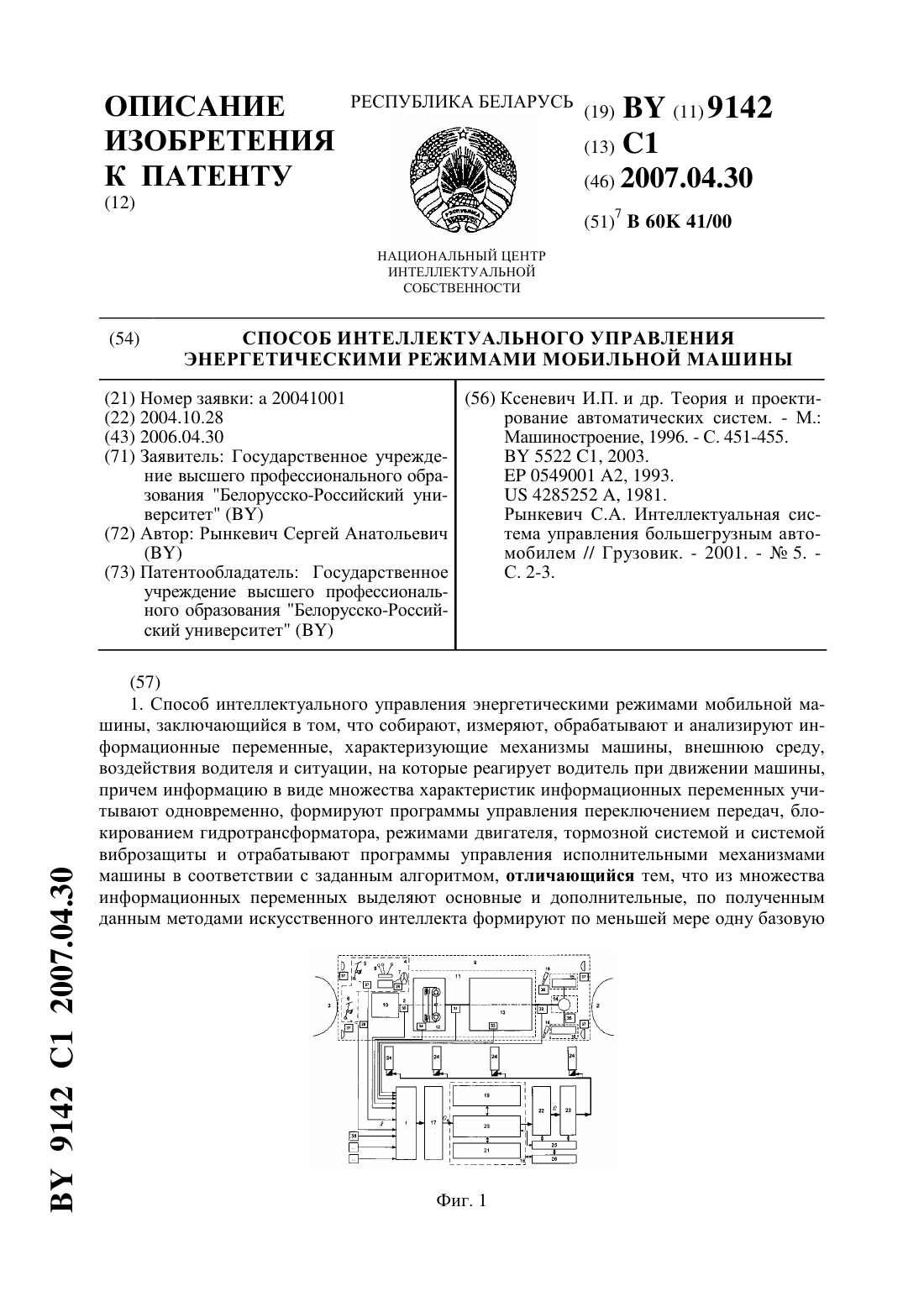
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: мобильной, способ, интеллектуального, энергетическими, машины, управления, режимами
Текст:
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Система адаптивного интеллектуального управления энергетическими режимами мобильной машины

Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Андрияненко Юрий Анатольевич, Коробкин Владимир Андреевич, Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B65K 41/00
Метки: машины, система, адаптивного, режимами, энергетическими, интеллектуального, мобильной, управления
Текст:
...двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного...