Способ неразрушающего контроля площади поперечного сечения протяженного ферромагнитного объекта и обнаружения локальных дефектов в нем и устройство для его осуществления

Текст
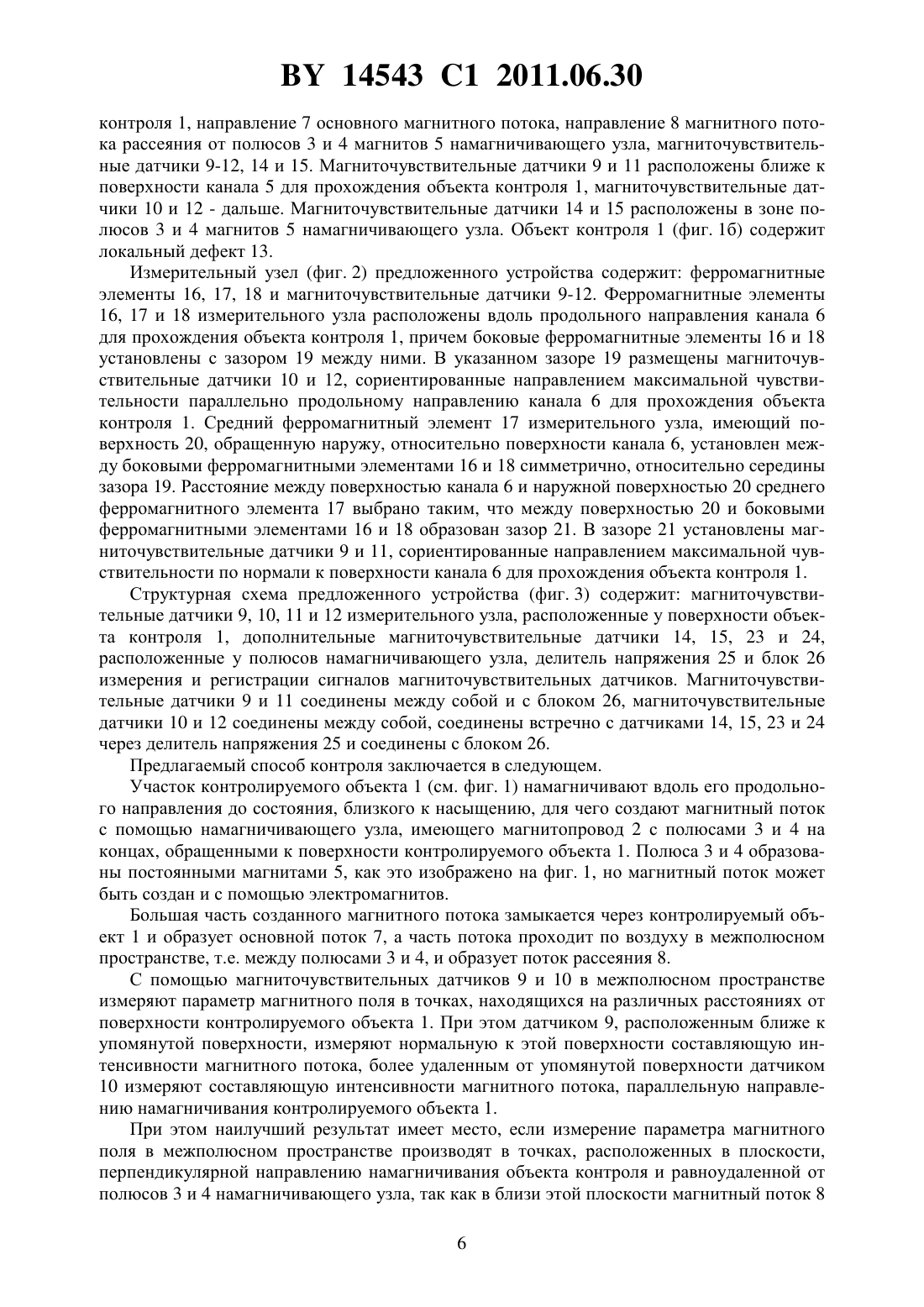
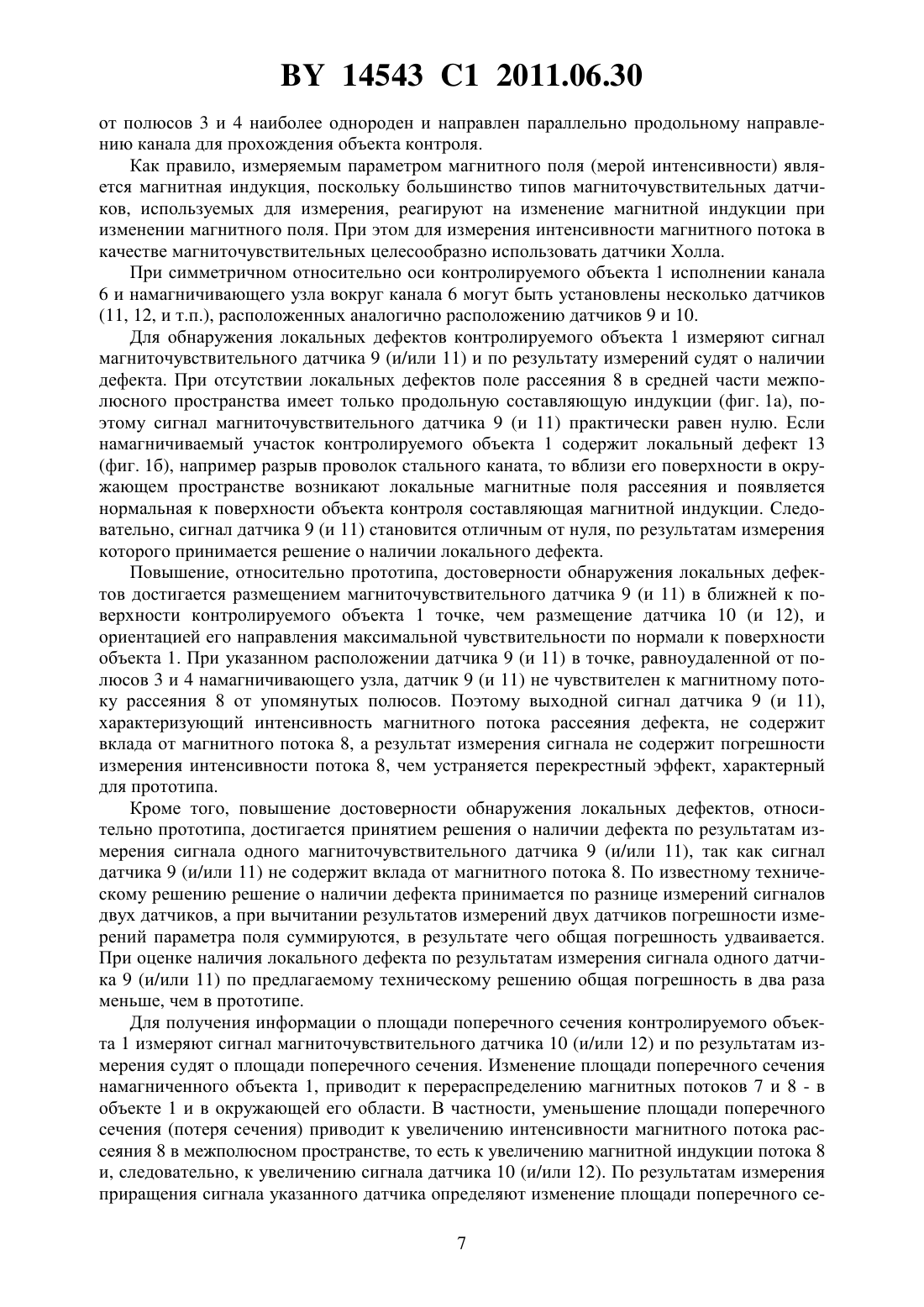
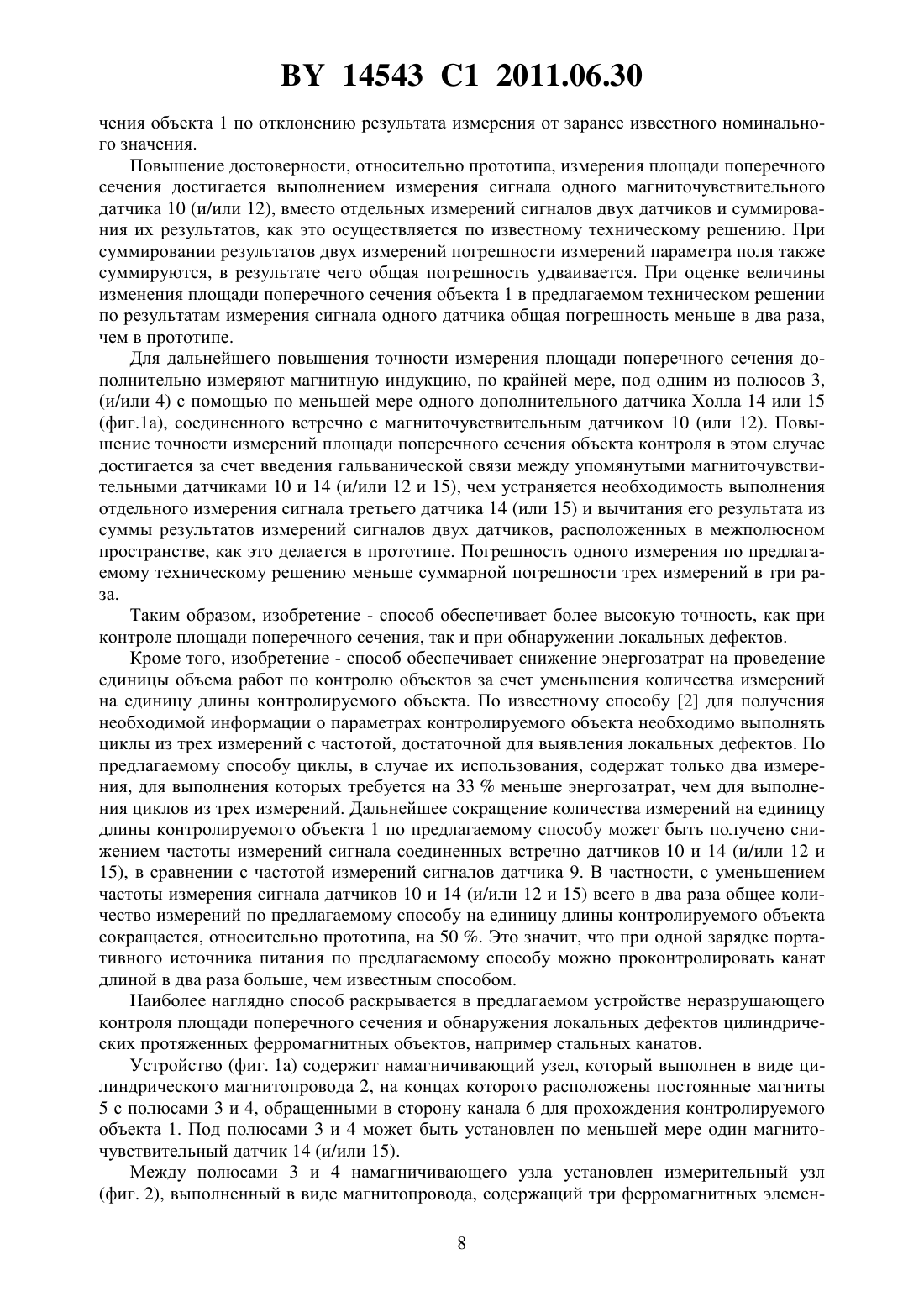
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ПЛОЩАДИ ПОПЕРЕЧНОГО СЕЧЕНИЯ ПРОТЯЖЕННОГО ФЕРРОМАГНИТНОГО ОБЪЕКТА И ОБНАРУЖЕНИЯ ЛОКАЛЬНЫХ ДЕФЕКТОВ В НЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(71) Заявитель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(72) Автор Гусев Александр Петрович(73) Патентообладатель Государственное научное учреждение Институт прикладной физики Национальной академии наук Беларуси(57) 1. Способ неразрушающего контроля площади поперечного сечения протяженного ферромагнитного объекта с обнаружением локальных дефектов в нем, в котором участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению,затем измеряют, по меньшей мере, в одной точке межполюсного пространства намагничивающего узла нормальную к поверхности контролируемого объекта составляющую интенсивности магнитного потока и делают вывод о наличии локальных дефектов по ненулевому результату измерения, а также измеряют, по меньшей мере, в одной точке межполюсного пространства на большем расстоянии от указанной поверхности, нежели в предыдущем случае, составляющую интенсивности магнитного потока, параллельную направлению намагничивания, и определяют изменение площади по отклонению результата измерения от заранее известного номинального значения. 14543 1 2011.06.30 2. Способ по п. 1, отличающийся тем, что измерения производят в точках, расположенных в плоскости, перпендикулярной направлению намагничивания объекта контроля и равноудаленной от полюсов намагничивающего узла. 3. Устройство для неразрушающего контроля площади поперечного сечения протяженного ферромагнитного объекта с обнаружением локальных дефектов в нем, содержащее намагничивающий узел, выполненный в виде магнитопровода с магнитными полюсами на его концах, обращенными в сторону канала для прохождения контролируемого объекта, измерительный узел, выполненный в виде магнитопровода, установленного в межполюсном пространстве намагничивающего узла и содержащего установленные вдоль указанного канала боковые ферромагнитные элементы, разделенные зазором, в котором симметрично относительно его середины установлен средний ферромагнитный элемент, а также связанные с блоком измерения и регистрации магниточувствительные датчики, по меньшей мере один из которых установлен в указанном зазоре, отличающееся тем, что датчик, установленный в указанном зазоре, сориентирован направлением максимальной чувствительности вдоль указанного канала, средний ферромагнитный элемент магнитопровода измерительного узла установлен с зазором между его внешней относительно канала поверхностью и внутренними поверхностями боковых ферромагнитных элементов, в котором установлен, по меньшей мере, один из указанных магниточувствительных датчиков, находящийся ближе к поверхности канала, нежели предыдущий указанный датчик, и сориентированный направлением максимальной чувствительности по нормали к поверхности канала. 4. Устройство по п. 3, отличающееся тем, что датчик, установленный в зазоре между боковыми ферромагнитными элементами измерительного узла, встречно соединен через делитель напряжения с дополнительным магниточувствительным датчиком, установленным под полюсом намагничивающего узла. Изобретение относится к области неразрушающего контроля качества изделий, в частности к средствам магнитного контроля протяженных ферромагнитных объектов, и предназначено, прежде всего, для дефектоскопического контроля канатов из стальной ферромагнитной проволоки. Уровень техники в области неразрушающего магнитного контроля подобных объектов может быть представлен следующими известными решениями. Известен способ неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, например стальных проволочных канатов 1, в котором участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, с помощью намагничивающего узла с полюсами, обращенными к контролируемому объекту. С помощью датчиков Холла измеряют индукцию магнитного поля под полюсами намагничивающего узла и по результату измерения поля под полюсами судят о площади поперечного сечения. Для получения информации о локальных дефектах измеряют магнитную индукцию в середине межполюсного пространства у поверхности контролируемого объекта. Этот способ реализован в известном устройстве неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, например стальных канатов. Устройство содержит намагничивающий узел в виде магнитопровода с расположенными на его концах магнитными полюсами, обращенными к каналу для прохождения контролируемого объекта, и расположенный между полюсами измерительный узел. Измерительный узел выполнен в виде магнитопровода Шобразного сечения, на среднем участке которого в зазоре установлен магниточувствительный датчик. По сигналу магниточувствительного датчика измерительного узла судят о наличии локального дефекта. Для получения информации о площади поперечного сечения 2 14543 1 2011.06.30 магниточувствительные датчики установлены под полюсами намагничивающего узла. Выходы магниточувствительных датчиков подключены к блоку обработки сигналов датчиков. Приведенные способ и устройство имеют следующие недостатки. Измерение потери сечения ведется при высоком начальном уровне сигнала и изменение сигнала при потере сечения составляет малую долю этого уровня, поскольку магнитная индукция в зазоре между полюсами и контролируемым объектом довольно слабо зависит от сечения объекта. Изменение магнитной индукции за счет появления или исчезновения тонкого поверхностного слоя металла при изменении сечения объекта составляет малую долю от результирующего магнитного потока в зазорах. Поэтому выходные сигналы датчиков, расположенных в этих зазорах, изменяются в незначительной степени. В результате возникают погрешности соизмерения малых относительных изменений сигнала при высоком начальном уровне. При этом значительной оказывается температурная погрешность. Кроме того, известное устройство имеет недостаточную достоверность обнаружения локальных дефектов, что вызвано формой сечения магнитопровода и расположением магниточувствительного датчика в зазоре средней его части. При попадании локального дефекта в зону чувствительности датчика поток рассеяния, вызванный дефектом и захваченный магнитопроводом измерительного узла, разделяется на две части одна проходит через зазор с датчиком Холла, а другая - через магнитопровод, минуя датчик. Из-за этого приращение магнитной индукции, вызванное дефектом, в месте расположения датчика Холла уменьшается, следовательно уменьшается и сигнал от дефекта и достоверность обнаружения локального дефекта. Известен также способ неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов, например стальных проволочных канатов 2, по которому участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, с помощью намагничивающего узла с полюсами, обращенными к оси контролируемого объекта, и производят измерение параметра магнитного поля, например магнитной индукции в межполюсном пространстве у поверхности контролируемого объекта. При этом измерение параметра магнитного поля производят, по крайней мере, в одной паре точек, лежащих на линии, параллельной оси контролируемого объекта, сигналы о результатах измерения в этих точках вычитают один из другого и по полученной разности сигналов (далее называемой первой разностью) судят о наличии локального дефекта. Для получения информации о площади поперечного сечения сигналы о результатах измерения в этих точках суммируют, дополнительно измеряют параметр магнитного поля, по крайней мере, под одним из полюсов намагничивающего узла и определяют вторую разность сигналов - между суммой сигналов о параметре магнитного поля в упомянутой паре точек и результатом измерения, по крайней мере, под одним из полюсов намагничивающего узла, умноженным на весовой коэффициент. Описанное там же 2 устройство содержит намагничивающий узел в виде магнитопровода с расположенными на его концах магнитными полюсами, обращенными к каналу для прохождения контролируемого объекта, измерительный узел в виде магнитопровода,расположенного между полюсами намагничивающего узла, и магниточувствительных датчиков и блок обработки сигналов магниточувствительных датчиков. Магнитопровод измерительного узла выполнен состоящим из трех элементов, расположенных вдоль оси канала для прохождения контролируемого объекта, причем средний элемент установлен с зазорами между двумя крайними, а магниточувствительные датчики измерительного узла установлены попарно на линии, параллельной оси канала для прохождения контролируемого объекта, в зазорах между средним и крайними элементами магнитопровода измерительного узла. Устройство может быть снабжено, по крайней мере, одним дополнительным магниточувствительным датчиком, установленным под полюсом намагничивающего узла. 3 14543 1 2011.06.30 Описанные в упомянутом патенте 2 способ и устройство неразрушающего контроля являются наиболее близкими к предлагаемому техническому решению. Хотя приведенные в 2 способ и устройство позволяют несколько уменьшить, относительно технического решения 1, погрешность измерения сечения объекта, вызванной некоторыми мешающими факторами, в частности - непостоянством температуры объекта и намагничивающего узла, однако, достоверность контроля является недостаточной из-за различных погрешностей измерений параметра магнитных потоков, а большое количество измерений на единицу длины объекта контроля требует больших энергозатрат. По способу 2 измерения параметров магнитного поля производятся, по меньшей мере,в двух точках - отдельно в каждой точке, затем результаты измерений вычитают и суммируют. При вычитании результатов измерений в двух точках погрешности измерений суммируются, чем снижается точность определения наличия локальных дефектов объекта контроля. При определении площади поперечного сечения объекта контроля производится суммирование результатов измерений в двух точках межполюсного пространства и вычитание из полученной суммы результата измерения в третьей точке - под полюсом намагничивающего узла. Поскольку погрешности измерений суммируются, то результирующая погрешность в данном случае равна утроенной погрешности измерений, чем снижается точность определения площади поперечного сечения объекта контроля. При этом на точность определения параметров объекта контроля оказывает влияние также перекрестный эффект, заключающийся во влиянии на точность измерения интенсивности магнитного потока, характеризующего один параметр контролируемого объекта, погрешности измерения интенсивности магнитного потока, относящегося к другому параметру объекта. Через каждый из двух магниточувствительных датчиков измерительного узла,расположенных в указанных по способу 2 точках, проходят два магнитных потока поток магнитного поля рассеяния локального дефекта и поток рассеяния от полюсов намагничивающего узла. Поэтому сигнал на выходе каждого магниточувствительного датчика является результирующим от действия на датчик двух потоков, следовательно, погрешность измерения этих результирующих сигналов содержит погрешность измерения интенсивности обоих потоков. Это значит, что погрешность определения наличия локального дефекта объекта контроля вычитанием результатов измерений в двух точках содержит не только погрешность измерения интенсивности потока рассеяния от дефекта, но и удвоенную погрешность измерения интенсивности потока рассеяния от полюсов намагничивающего узла, чем существенно снижается достоверность определения наличия дефекта. Аналогичная ситуация существует и при определении по способу 2 другого параметра объекта контроля - площади его поперечного сечения. Кроме недостаточной точности определения параметров контролируемого объекта,известный способ обладает другим недостатком - большими энергозатратами из-за необходимости выполнения большого количества измерений на единицу длины контролируемого объекта при циклическом измерении сигналов трех датчиков. Это, при использовании портативных источников питания, существенно сокращает объем выполненных работ по контролю объектов между перезарядками источника питания, увеличивает время и стоимость контроля одного объекта. Техническая задача, решаемая изобретением, состоит в повышении точности измерения площади поперечного сечения объекта контроля и достоверности обнаружения локальных дефектов и снижения удельных энергозатрат на выполнение контроля. Для решения этой технической задачи в предлагаемом способе участок контролируемого объекта продольно намагничивают до состояния, близкого к насыщению, затем измеряют по меньшей мере в одной точке межполюсного пространства намагничивающего узла нормальную к поверхности контролируемого объекта составляющую интенсивности магнитного потока и делают вывод о наличии локальных дефектов по ненулевому результату измерения, а также измеряют по меньшей мере в одной точке межполюсного про 4 14543 1 2011.06.30 странства на большем расстоянии от указанной поверхности, нежели в предыдущем случае, составляющую интенсивности магнитного потока, параллельную направлению намагничивания, и определяют изменение площади поперечного сечения по отклонению результата измерения от заранее известного номинального значения. При этом наилучший результат имеет место, если измерение параметра магнитного поля в межполюсном пространстве производят в точках, расположенных в плоскости,перпендикулярной направлению намагничивания объекта контроля и равноудаленной от полюсов намагничивающего узла. Вышеуказанный способ может быть осуществлен с помощью предлагаемого устройства для неразрушающего контроля площади поперечного сечения протяженного ферромагнитного объекта и обнаружения локальных дефектов в нем, содержащее намагничивающий узел, выполненный в виде магнитопровода с магнитными полюсами на его концах,обращенными в сторону канала для прохождения контролируемого объекта, измерительный узел, выполненный в виде магнитопровода, установленного в межполюсном пространстве намагничивающего узла и содержащего установленные вдоль указанного канала боковые ферромагнитные элементы, разделенные зазором, в котором симметрично относительно его середины установлен средний ферромагнитный элемент, а также связанные с блоком измерения и регистрации магниточувствительные датчики, по меньшей мере один из которых установлен в указанном зазоре. В отличие от прототипа датчик, установленный в указанном зазоре, сориентирован направлением максимальной чувствительности вдоль указанного канала, средний ферромагнитный элемент магнитопровода измерительного узла установлен с зазором между его внешней относительно канала поверхностью и внутренними поверхностями боковых ферромагнитных элементов, в котором установлен по меньшей мере один из указанных магниточувствительных датчиков, находящийся ближе к поверхности канала, нежели предыдущий указанный датчик, и сориентированный направлением максимальной чувствительности по нормали к поверхности канала. Магниточувствительный датчик, установленный в зазоре между боковыми ферромагнитными элементами измерительного узла, встречно соединен через делитель напряжения с дополнительным магниточувствительным датчиком, установленным под полюсом намагничивающего узла. Это дает дальнейшее повышение точности измерений площади поперечного сечения объекта контроля за счет введения гальванической связи между упомянутыми магниточувствительными датчиками, чем устраняется удваивание погрешности измерений параметров магнитных потоков, так как отпадает необходимость вычитания результатов отдельных измерений. Предложенный способ и устройство для его осуществления более подробно раскрываются приведенными ниже примерами, которые, однако, не исчерпывают всех возможных вариантов реализации. Изобретение иллюстрируется чертежами, где изображены на фиг. 1 - схема размещения намагничивающего узла и магниточувствительных датчиков относительно объекта контроля, а также распределение магнитных потоков а) при однородном контролируемом объекте, без локальных дефектов,б) при наличии зоны локального дефекта в контролируемом объекте на фиг. 2 - измерительный узел предложенного устройства при цилиндрическом исполнении магнитопроводов измерительного узла а) продольный разрез,б) поперечный разрез на фиг. 3 - структурная схема предложенного устройства. Схема размещения намагничивающего узла и магниточувствительных датчиков(фиг. 1) содержит объект контроля 1, магнитопровод 2 намагничивающего узла, магнитные полюсы 3 и 4 магнитов 5 намагничивающего узла, канал 6 для прохождения объекта 5 14543 1 2011.06.30 контроля 1, направление 7 основного магнитного потока, направление 8 магнитного потока рассеяния от полюсов 3 и 4 магнитов 5 намагничивающего узла, магниточувствительные датчики 9-12, 14 и 15. Магниточувствительные датчики 9 и 11 расположены ближе к поверхности канала 5 для прохождения объекта контроля 1, магниточувствительные датчики 10 и 12 - дальше. Магниточувствительные датчики 14 и 15 расположены в зоне полюсов 3 и 4 магнитов 5 намагничивающего узла. Объект контроля 1 (фиг. 1 б) содержит локальный дефект 13. Измерительный узел (фиг. 2) предложенного устройства содержит ферромагнитные элементы 16, 17, 18 и магниточувствительные датчики 9-12. Ферромагнитные элементы 16, 17 и 18 измерительного узла расположены вдоль продольного направления канала 6 для прохождения объекта контроля 1, причем боковые ферромагнитные элементы 16 и 18 установлены с зазором 19 между ними. В указанном зазоре 19 размещены магниточувствительные датчики 10 и 12, сориентированные направлением максимальной чувствительности параллельно продольному направлению канала 6 для прохождения объекта контроля 1. Средний ферромагнитный элемент 17 измерительного узла, имеющий поверхность 20, обращенную наружу, относительно поверхности канала 6, установлен между боковыми ферромагнитными элементами 16 и 18 симметрично, относительно середины зазора 19. Расстояние между поверхностью канала 6 и наружной поверхностью 20 среднего ферромагнитного элемента 17 выбрано таким, что между поверхностью 20 и боковыми ферромагнитными элементами 16 и 18 образован зазор 21. В зазоре 21 установлены магниточувствительные датчики 9 и 11, сориентированные направлением максимальной чувствительности по нормали к поверхности канала 6 для прохождения объекта контроля 1. Структурная схема предложенного устройства (фиг. 3) содержит магниточувствительные датчики 9, 10, 11 и 12 измерительного узла, расположенные у поверхности объекта контроля 1, дополнительные магниточувствительные датчики 14, 15, 23 и 24,расположенные у полюсов намагничивающего узла, делитель напряжения 25 и блок 26 измерения и регистрации сигналов магниточувствительных датчиков. Магниточувствительные датчики 9 и 11 соединены между собой и с блоком 26, магниточувствительные датчики 10 и 12 соединены между собой, соединены встречно с датчиками 14, 15, 23 и 24 через делитель напряжения 25 и соединены с блоком 26. Предлагаемый способ контроля заключается в следующем. Участок контролируемого объекта 1 (см. фиг. 1) намагничивают вдоль его продольного направления до состояния, близкого к насыщению, для чего создают магнитный поток с помощью намагничивающего узла, имеющего магнитопровод 2 с полюсами 3 и 4 на концах, обращенными к поверхности контролируемого объекта 1. Полюса 3 и 4 образованы постоянными магнитами 5, как это изображено на фиг. 1, но магнитный поток может быть создан и с помощью электромагнитов. Большая часть созданного магнитного потока замыкается через контролируемый объект 1 и образует основной поток 7, а часть потока проходит по воздуху в межполюсном пространстве, т.е. между полюсами 3 и 4, и образует поток рассеяния 8. С помощью магниточувствительных датчиков 9 и 10 в межполюсном пространстве измеряют параметр магнитного поля в точках, находящихся на различных расстояниях от поверхности контролируемого объекта 1. При этом датчиком 9, расположенным ближе к упомянутой поверхности, измеряют нормальную к этой поверхности составляющую интенсивности магнитного потока, более удаленным от упомянутой поверхности датчиком 10 измеряют составляющую интенсивности магнитного потока, параллельную направлению намагничивания контролируемого объекта 1. При этом наилучший результат имеет место, если измерение параметра магнитного поля в межполюсном пространстве производят в точках, расположенных в плоскости,перпендикулярной направлению намагничивания объекта контроля и равноудаленной от полюсов 3 и 4 намагничивающего узла, так как в близи этой плоскости магнитный поток 8 6 14543 1 2011.06.30 от полюсов 3 и 4 наиболее однороден и направлен параллельно продольному направлению канала для прохождения объекта контроля. Как правило, измеряемым параметром магнитного поля (мерой интенсивности) является магнитная индукция, поскольку большинство типов магниточувствительных датчиков, используемых для измерения, реагируют на изменение магнитной индукции при изменении магнитного поля. При этом для измерения интенсивности магнитного потока в качестве магниточувствительных целесообразно использовать датчики Холла. При симметричном относительно оси контролируемого объекта 1 исполнении канала 6 и намагничивающего узла вокруг канала 6 могут быть установлены несколько датчиков(11, 12, и т.п.), расположенных аналогично расположению датчиков 9 и 10. Для обнаружения локальных дефектов контролируемого объекта 1 измеряют сигнал магниточувствительного датчика 9 (и/или 11) и по результату измерений судят о наличии дефекта. При отсутствии локальных дефектов поле рассеяния 8 в средней части межполюсного пространства имеет только продольную составляющую индукции (фиг. 1), поэтому сигнал магниточувствительного датчика 9 (и 11) практически равен нулю. Если намагничиваемый участок контролируемого объекта 1 содержит локальный дефект 13(фиг. 1 б), например разрыв проволок стального каната, то вблизи его поверхности в окружающем пространстве возникают локальные магнитные поля рассеяния и появляется нормальная к поверхности объекта контроля составляющая магнитной индукции. Следовательно, сигнал датчика 9 (и 11) становится отличным от нуля, по результатам измерения которого принимается решение о наличии локального дефекта. Повышение, относительно прототипа, достоверности обнаружения локальных дефектов достигается размещением магниточувствительного датчика 9 (и 11) в ближней к поверхности контролируемого объекта 1 точке, чем размещение датчика 10 (и 12), и ориентацией его направления максимальной чувствительности по нормали к поверхности объекта 1. При указанном расположении датчика 9 (и 11) в точке, равноудаленной от полюсов 3 и 4 намагничивающего узла, датчик 9 (и 11) не чувствителен к магнитному потоку рассеяния 8 от упомянутых полюсов. Поэтому выходной сигнал датчика 9 (и 11),характеризующий интенсивность магнитного потока рассеяния дефекта, не содержит вклада от магнитного потока 8, а результат измерения сигнала не содержит погрешности измерения интенсивности потока 8, чем устраняется перекрестный эффект, характерный для прототипа. Кроме того, повышение достоверности обнаружения локальных дефектов, относительно прототипа, достигается принятием решения о наличии дефекта по результатам измерения сигнала одного магниточувствительного датчика 9 (и/или 11), так как сигнал датчика 9 (и/или 11) не содержит вклада от магнитного потока 8. По известному техническому решению решение о наличии дефекта принимается по разнице измерений сигналов двух датчиков, а при вычитании результатов измерений двух датчиков погрешности измерений параметра поля суммируются, в результате чего общая погрешность удваивается. При оценке наличия локального дефекта по результатам измерения сигнала одного датчика 9 (и/или 11) по предлагаемому техническому решению общая погрешность в два раза меньше, чем в прототипе. Для получения информации о площади поперечного сечения контролируемого объекта 1 измеряют сигнал магниточувствительного датчика 10 (и/или 12) и по результатам измерения судят о площади поперечного сечения. Изменение площади поперечного сечения намагниченного объекта 1, приводит к перераспределению магнитных потоков 7 и 8 - в объекте 1 и в окружающей его области. В частности, уменьшение площади поперечного сечения (потеря сечения) приводит к увеличению интенсивности магнитного потока рассеяния 8 в межполюсном пространстве, то есть к увеличению магнитной индукции потока 8 и, следовательно, к увеличению сигнала датчика 10 (и/или 12). По результатам измерения приращения сигнала указанного датчика определяют изменение площади поперечного се 7 14543 1 2011.06.30 чения объекта 1 по отклонению результата измерения от заранее известного номинального значения. Повышение достоверности, относительно прототипа, измерения площади поперечного сечения достигается выполнением измерения сигнала одного магниточувствительного датчика 10 (и/или 12), вместо отдельных измерений сигналов двух датчиков и суммирования их результатов, как это осуществляется по известному техническому решению. При суммировании результатов двух измерений погрешности измерений параметра поля также суммируются, в результате чего общая погрешность удваивается. При оценке величины изменения площади поперечного сечения объекта 1 в предлагаемом техническом решении по результатам измерения сигнала одного датчика общая погрешность меньше в два раза,чем в прототипе. Для дальнейшего повышения точности измерения площади поперечного сечения дополнительно измеряют магнитную индукцию, по крайней мере, под одним из полюсов 3,(и/или 4) с помощью по меньшей мере одного дополнительного датчика Холла 14 или 15(фиг.1), соединенного встречно с магниточувствительным датчиком 10 (или 12). Повышение точности измерений площади поперечного сечения объекта контроля в этом случае достигается за счет введения гальванической связи между упомянутыми магниточувствительными датчиками 10 и 14 (и/или 12 и 15), чем устраняется необходимость выполнения отдельного измерения сигнала третьего датчика 14 (или 15) и вычитания его результата из суммы результатов измерений сигналов двух датчиков, расположенных в межполюсном пространстве, как это делается в прототипе. Погрешность одного измерения по предлагаемому техническому решению меньше суммарной погрешности трех измерений в три раза. Таким образом, изобретение - способ обеспечивает более высокую точность, как при контроле площади поперечного сечения, так и при обнаружении локальных дефектов. Кроме того, изобретение - способ обеспечивает снижение энергозатрат на проведение единицы объема работ по контролю объектов за счет уменьшения количества измерений на единицу длины контролируемого объекта. По известному способу 2 для получения необходимой информации о параметрах контролируемого объекта необходимо выполнять циклы из трех измерений с частотой, достаточной для выявления локальных дефектов. По предлагаемому способу циклы, в случае их использования, содержат только два измерения, для выполнения которых требуется на 33 меньше энергозатрат, чем для выполнения циклов из трех измерений. Дальнейшее сокращение количества измерений на единицу длины контролируемого объекта 1 по предлагаемому способу может быть получено снижением частоты измерений сигнала соединенных встречно датчиков 10 и 14 (и/или 12 и 15), в сравнении с частотой измерений сигналов датчика 9. В частности, с уменьшением частоты измерения сигнала датчиков 10 и 14 (и/или 12 и 15) всего в два раза общее количество измерений по предлагаемому способу на единицу длины контролируемого объекта сокращается, относительно прототипа, на 50 . Это значит, что при одной зарядке портативного источника питания по предлагаемому способу можно проконтролировать канат длиной в два раза больше, чем известным способом. Наиболее наглядно способ раскрывается в предлагаемом устройстве неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов цилиндрических протяженных ферромагнитных объектов, например стальных канатов. Устройство (фиг. 1) содержит намагничивающий узел, который выполнен в виде цилиндрического магнитопровода 2, на концах которого расположены постоянные магниты 5 с полюсами 3 и 4, обращенными в сторону канала 6 для прохождения контролируемого объекта 1. Под полюсами 3 и 4 может быть установлен по меньшей мере один магниточувствительный датчик 14 (и/или 15). Между полюсами 3 и 4 намагничивающего узла установлен измерительный узл(фиг. 2), выполненный в виде магнитопровода, содержащий три ферромагнитных элемен 8 14543 1 2011.06.30 та 16, 17 и 18. Боковые элементы 16 и 18 установлены вдоль продольного направления канала 6 для прохождения контролируемого объекта 1 с зазором 19 между ними. В зазоре 19 установлен по меньшей мере один магниточувствительный датчик 10 (и/или 12), направление максимальной чувствительности которого сориентировано вдоль продольного направления канала 6. Датчик 10 (или 12) соединен встречно (фиг. 3) с датчиком 14 (или 15) через делитель напряжения 25 и с блоком 26 измерения и регистрации сигналов датчиков. Средний ферромагнитный элемент 17 (фиг. 2) магнитопровода измерительного узла установлен между боковыми элементами 16 и 18 симметрично, относительно середины зазора 19 и своей внешней поверхностью 20 образует зазор 21 с боковыми элементами 16 и 18. В зазоре 21 установлен, по меньшей мере, один, соединенный с блоком 26 (фиг. 3) измерения и регистрации сигналов, магниточувствительный датчик 9 (и/или 11), направление максимальной чувствительности которого сориентировано по нормали к поверхности канала 6 (фиг. 2). Устройство работает следующим образом. Измерение параметров магнитного поля по предлагаемому техническому решению производится в точках, расположенных на различном расстоянии от поверхности канала 6 для прохождения контролируемого объекта 1. При таком расположении точек возможно расположение боковых ферромагнитных элементов 16 и 18 (фиг. 2) измерительного узла с зазором 19 между ними и выполнение радиального зазора 21 между внешней поверхностью 20 среднего ферромагнитного элемента 17 измерительного узла и боковыми ферромагнитными элементами 16 и 18. Указанным выполнением зазоров 19 и 21 достигается разделение двух магнитных потоков - потока 22 поля рассеяния локального дефекта 13 объекта 1, например разрыва проволок стального каната, и потока 8 от магнитных полюсов 3 и 4 намагничивающего узла, а размещением магниточувствительных датчиков 9 и 10(и/или 11 и 12) в этих зазорах достигается возможность раздельного измерения интенсивности магнитных потоков 8 и 22. Поток 22 поля рассеяния дефекта 13, находящегося в зоне между ферромагнитными элементами 16 и 17 измерительного узла, захватывается этими элементами и замыкается через зазор 21, в котором установлен магниточувствительный датчик 9 (и/или 11), не чувствительный к потоку 8. Поэтому сигнал на выходе датчика 9 (и/или 11) несет информацию только о дефекте 13 контролируемого объекта 1. По результатам измерения с помощью блока 26 (фиг. 3) сигнала датчика 9 (и/или 11) судят о наличии локального дефекта. Поток 8 поля рассеяния от полюсов 3 и 4 (фиг. 1) намагничивающего узла, зависящий от площади поперечного сечения объекта 1, захватывается элементами 16 и 18 (фиг. 2) измерительного узла и замыкается через зазор 19. Поэтому сигнал датчика 10 (и/или 12) несет информацию о величине площади поперечного сечения объекта 1. По результатам измерения с помощью блока 26 (фиг. 3) сигнала датчика 10 (и/или 12) судят о площади поперечного сечения контролируемого объекта 1. Для более точного измерения приращения магнитного потока в точках расположения датчиков 10 и 14 (и/или 12 и 15), соответствующего отклонению площади поперечного сечения контролируемого объекта 1 от номинальной, начальный сигнал датчиков 10 и 14(и/или 12 и 15) целесообразно компенсировать, что можно осуществить с помощью делителя напряжения 25 (фиг. 3), например потенциометра, включенного в схему соединения датчиков 10 и 12 с датчиками 14, 15, 23 и 24, что не нарушает гальванической связи между ними. Компенсацию выполняют на участке контролируемого объекта 1, имеющем номинальную площадь поперечного сечения. Оценка площади поперечного сечения контролируемого объекта 1 и наличия в нем локальных дефектов по результатам измерения интенсивности разделенных магнитных потоков повышает достоверность контроля названных параметров объекта 1 за счет снижения общей погрешности измерения интенсивности магнитных потоков и уменьшает удельные энергозатраты за счет снижения количества измерений на выполнение контроля единицы длины объекта 1. 9 14543 1 2011.06.30 В случае контроля цилиндрических объектов ферромагнитные элементы 16, 17 и 18 магнитопровода измерительного узла (фиг. 2) выполнены в виде трех цилиндрических колец из магнитомягкого материала. Каждое цилиндрическое кольцо при этом может быть выполнено из нескольких составных частей. При контроле протяженных объектов, имеющих другую форму поверхности, форма намагничивающего узла и ферромагнитных элементов магнитопровода измерительного узла может отличаться от цилиндрической. Для определения координат локального дефекта контролируемого объекта относительно предварительно выбранной начальной координаты устройство может быть снабжено датчиком координаты контролируемого объекта. Таким образом, благодаря предложенным способу неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов и устройству для осуществления этого способа достигнуто повышение точности измерения поперечного сечения объектов контроля, в частности стальных канатов, повышение достоверности обнаружения локальных дефектов, например разрывов проволок в стальных канатах, и снижение удельных энергозатрат на выполнение измерений в процессе контроля. Изобретение может быть использовано во всех областях, связанных с изготовлением и применением протяженных ферромагнитных объектов, таких как стальные прутки, трубы,проволока, канаты, причем не только круглого сечения. Оно может быть использовано, в частности, при дефектоскопии канатов подъемных механизмов в горнорудной и строительной промышленности, в цехах и складах машиностроительных и металлургических предприятий, на канатных дорогах, канатов эксплуатирующихся лифтов и т.п. Источники информации 1..Патент 19601707 2, МПК 01 27/83,опубл. 1996. 2. Сухоруков В.В., Белицкий С.Б. Способ неразрушающего контроля площади поперечного сечения и обнаружения локальных дефектов протяженных ферромагнитных объектов и устройство для его осуществления Патент(11)2204129, (13) 2, МПК 01 27/82,опубл. 2003. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 11
МПК / Метки
МПК: G01N 27/72
Метки: поперечного, ферромагнитного, устройство, нем, контроля, дефектов, протяженного, способ, неразрушающего, осуществления, сечения, локальных, обнаружения, площади, объекта
Код ссылки
<a href="https://by.patents.su/11-14543-sposob-nerazrushayushhego-kontrolya-ploshhadi-poperechnogo-secheniya-protyazhennogo-ferromagnitnogo-obekta-i-obnaruzheniya-lokalnyh-defektov-v-nem-i-ustrojjstvo-dlya-ego-osushhestv.html" rel="bookmark" title="База патентов Беларуси">Способ неразрушающего контроля площади поперечного сечения протяженного ферромагнитного объекта и обнаружения локальных дефектов в нем и устройство для его осуществления</a>
Способ магнитного контроля толщины поверхностно-упрочненного слоя протяженного ферромагнитного изделия
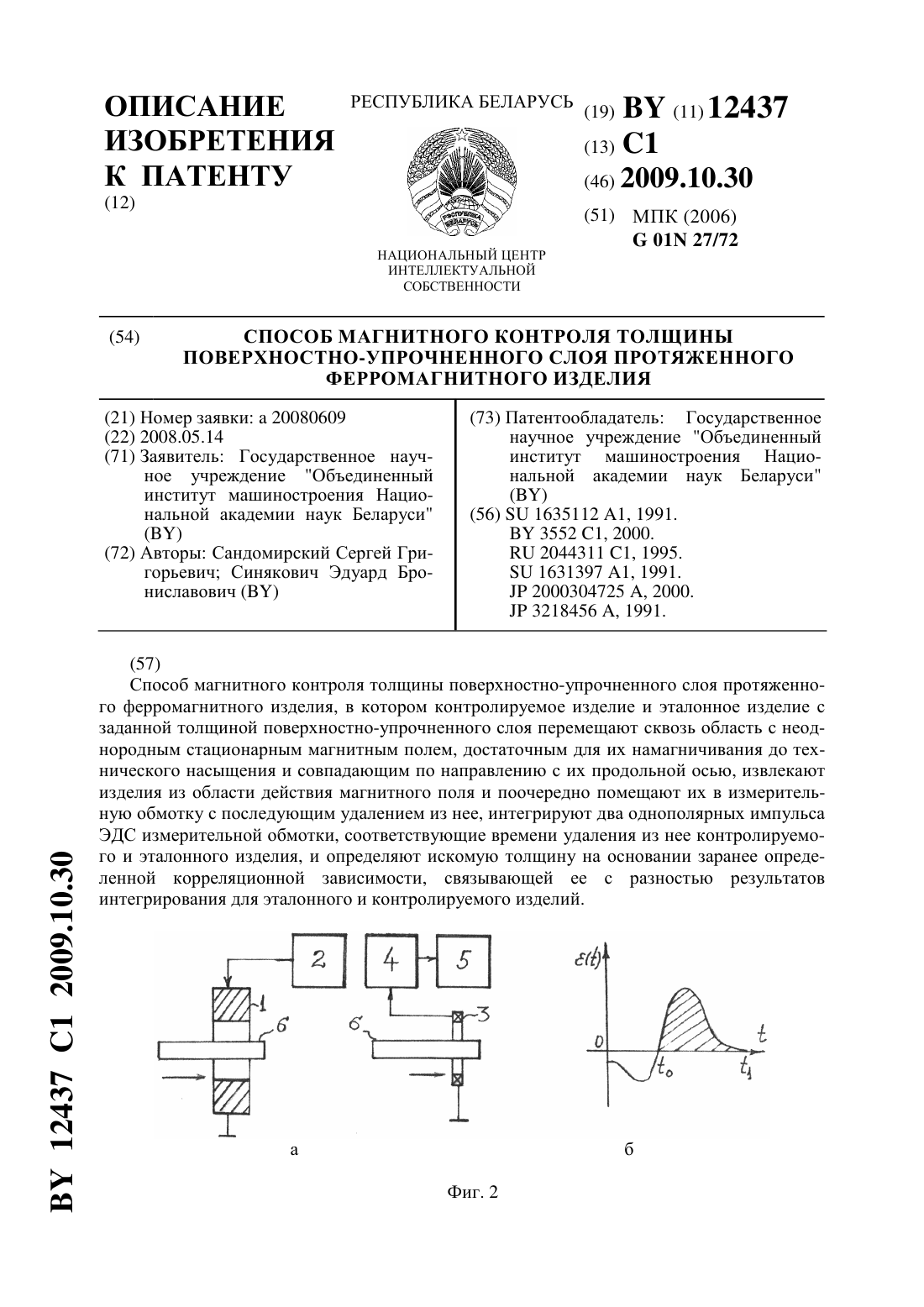
Номер патента: 12437
Опубликовано: 30.10.2009
Авторы: Синякович Эдуард Брониславович, Сандомирский Сергей Григорьевич
МПК: G01N 27/72
Метки: поверхностно-упрочненного, контроля, ферромагнитного, способ, протяженного, толщины, изделия, слоя, магнитного
Текст:
...от толщиныповерхностного слоя в форме полого цилиндра из материала с Н - 590 А/м (кривые 1/ и 2/) и с Н 1700 А/м (кривые 1 и 2) представлены на фиг. 1. Образцы изготовлены из стали ШХ 15 с различной микроструктурой. Кривыми 1 Р и 2 Р обозначены разности соответственно между зависимостями 1 и 1/ и зависимостями 2 и 2/. 12437 1 2009.10.30 Как показали эксперименты, при постоянстве длины изделий увеличение их диаметра при постоянстве магнитных...
Способ неразрушающего контроля и устройство для его осуществления
Номер патента: 3295
Опубликовано: 30.03.2000
Авторы: Правоторов Юрий Витальевич, Сергеев Сергей Сергеевич
МПК: G01H 9/00, G01N 29/00
Метки: контроля, устройство, способ, неразрушающего, осуществления
Текст:
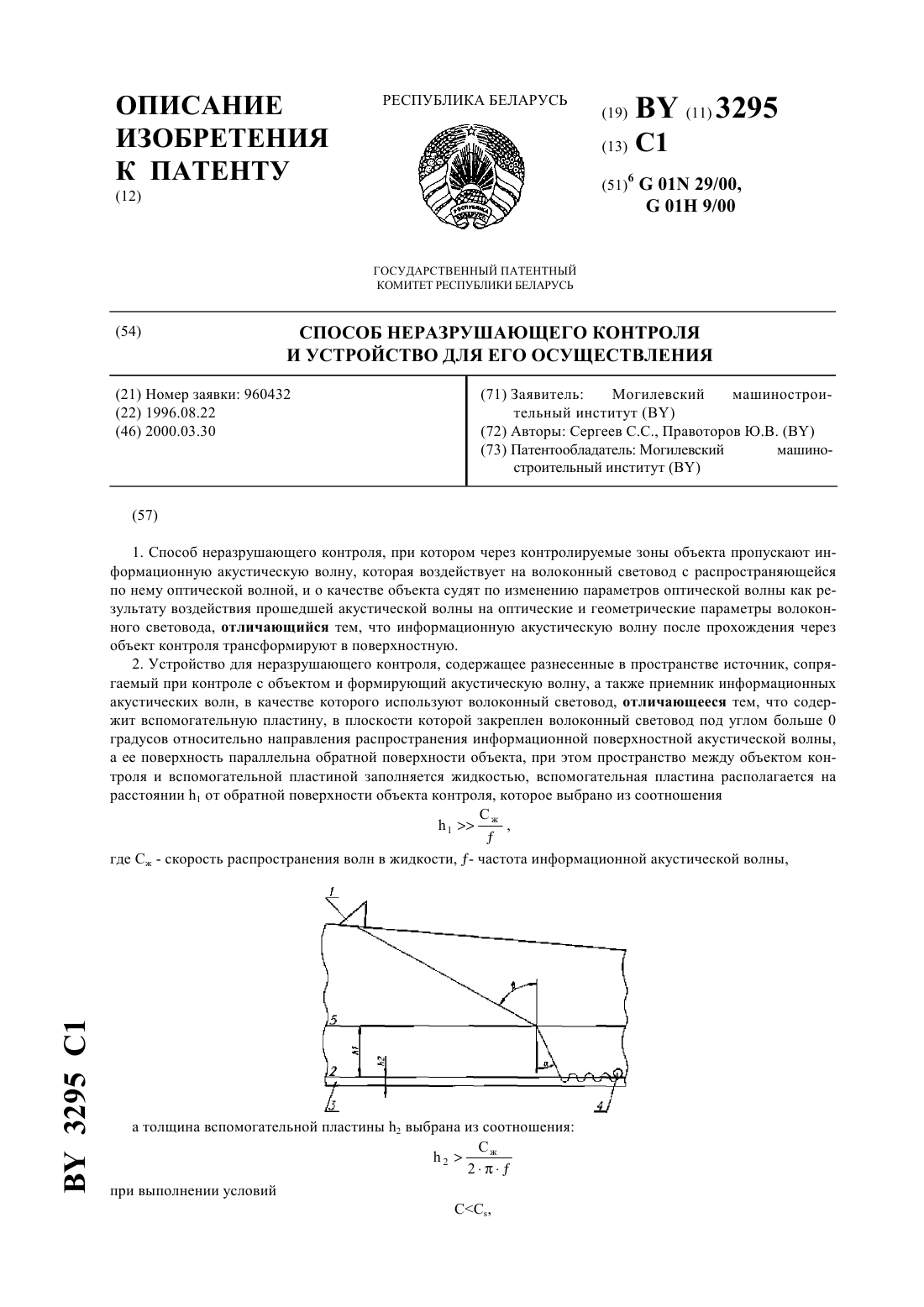
...качестве объекта судят по изменению параметров оптической волны как результату воздействия прошедшей акустической волны на оптические и геометрические параметры волоконного световода, согласно изобретению, информационную акустическую волну после прохождения через объект контроля трансформируют в поверхностную. Решение указанной задачи достигается также тем, что предложено устройство для неразрушающего контроля, содержащее разнесенные в...
Способ неразрушающего контроля количественного распределения физико-механических свойств ферромагнитного изделия, связанных с его магнитными свойствами, по его глубине
Номер патента: 9667
Опубликовано: 30.08.2007
Авторы: Шарандо Владимир Иванович, Булатов Олег Владимирович, Шукевич Анатолий Киприянович, Лухвич Александр Александрович
МПК: G01R 33/12, G01N 27/72
Метки: физико-механических, неразрушающего, глубине, распределения, свойствами, контроля, магнитными, связанных, ферромагнитного, способ, свойств, количественного, изделия
Текст:
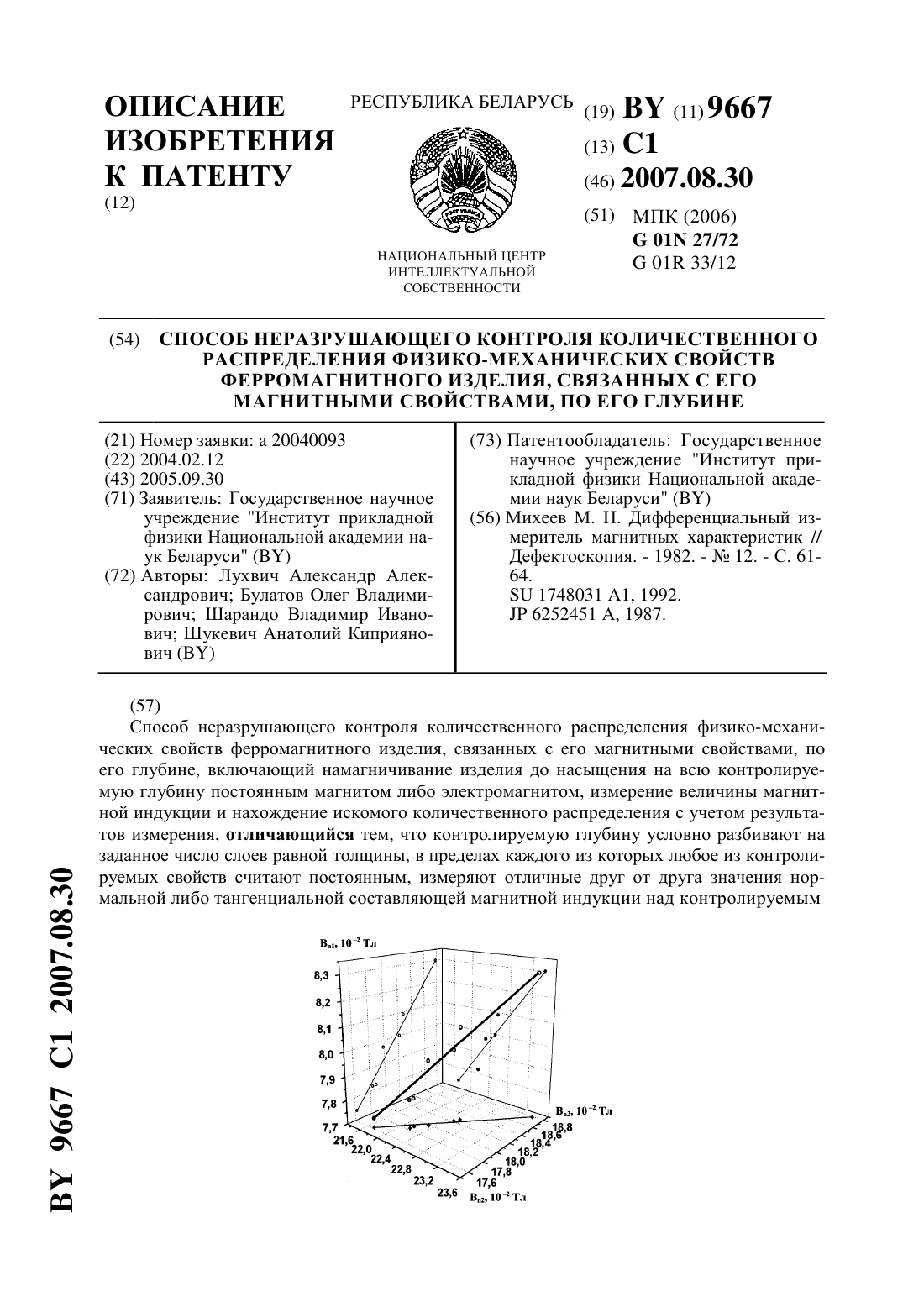
...каждого такого слоя считается однородным. Затем измеряют нормальную или тангенциальную составляющую магнитной индукции поля над поверхностью контролируемого изделия в точках, в которых магнитная индукция имеет разные по величине (знаку) значения, причем число точек равно числу условных слоев. Затем определяют положение точки, координатами которой служат полученные значения составляющей индукции, в пространстве этой составляющей, причем...
Способ неразрушающего контроля усталости металлического изделия и устройство для его осуществления

Номер патента: 10954
Опубликовано: 30.08.2008
Авторы: Довгялло Анатолий Григорьевич, Бусько Валерий Николаевич, Венгринович Валерий Львович
МПК: G01N 27/72, G01N 3/32
Метки: контроля, изделия, металлического, осуществления, неразрушающего, усталости, способ, устройство
Текст:
...распределения ШБ в образцах, подвергнутых знакопеременному циклированию изгибом. В результате впервые было установлено, что по мере увеличения числа циклов нагружения существенно возрастает градиент магнитного ШБ по глубине образца. Это является результатом сегрегации дефектов структуры металла и примесей на поверхности. Как правило, с увеличением степени деградации металла в процессе усталости ШБ в тонком поверхностном слое возрастает,...
Способ неразрушающего контроля прочности напрессовки колец подшипников на шейку оси колесной пары и устройство для его осуществления
Номер патента: 13116
Опубликовано: 30.04.2010
Авторы: Чернин Ростислав Игоревич, Сенько Надежда Григорьевна, Сенько Вениамин Иванович, Чернин Игорь Леонидович
МПК: B23P 11/02, G01L 1/20
Метки: устройство, контроля, пары, колец, колесной, напрессовки, прочности, осуществления, способ, подшипников, неразрушающего, оси, шейку
Текст:
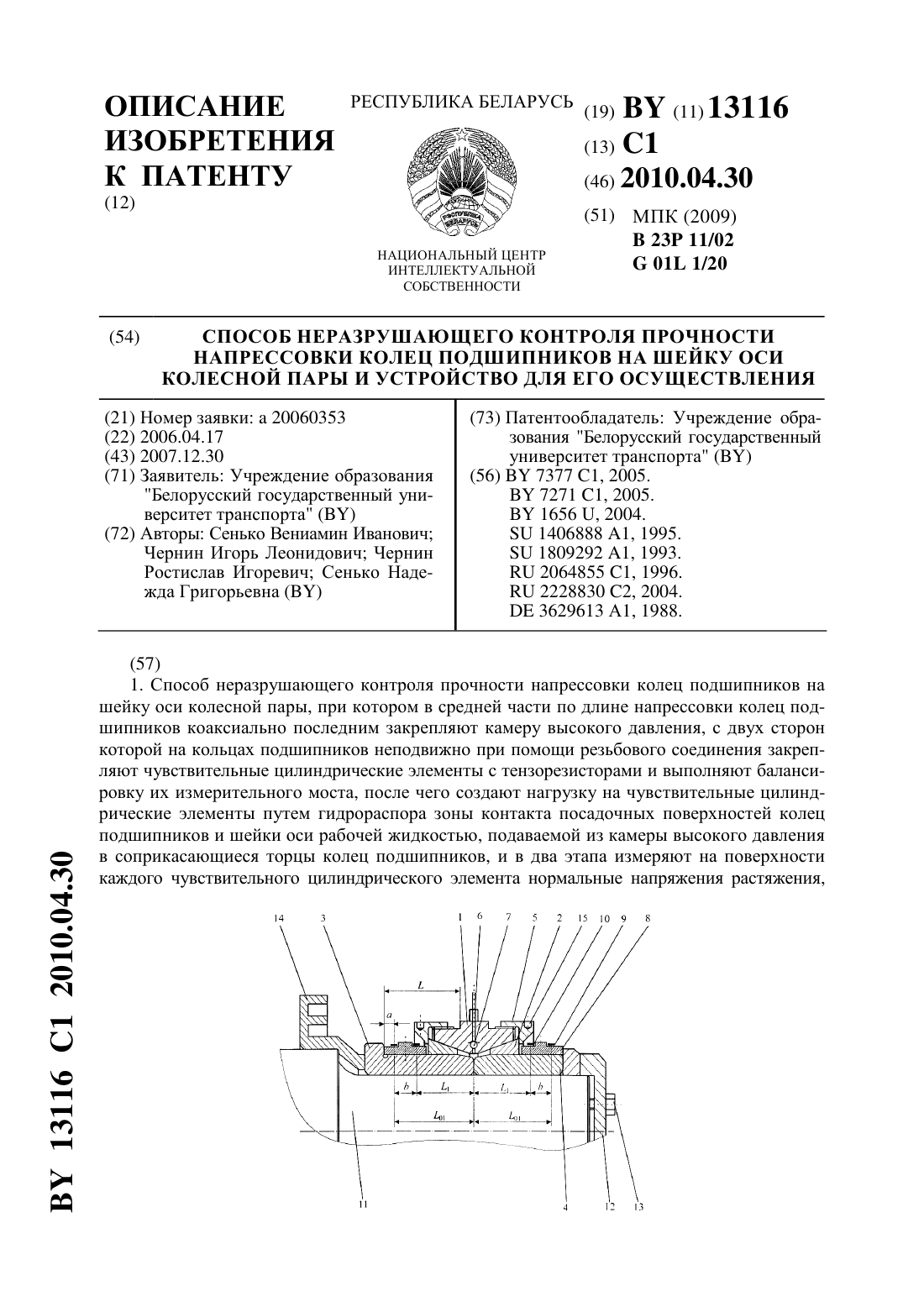
...цилиндрической поверхности - кольцевой замкнутой полостью для циркуляции среды, охлаждающей установленные в ней тензорезисторы внутренняя герметически изолированная полость чувствительного элемента заполнена рабочей жидкостью для передачи на его стенки гидростатического давления от радиальной деформации кольца подшипника при создании натяга в соединении внутренняя полость чувствительного элемента соединена с источником давления рабочей...
Предыдущий патент: Способ обработки зубьев зубчатых секторов крупногабаритных зубчатых колес методом копирования
Следующий патент: Декоративное стекло
Случайный патент: Спица для остеосинтеза