Способ управления гидромеханической передачей мобильной машины
Номер патента: 13551
Опубликовано: 30.08.2010
Авторы: Терешонок Сергей Михайлович, Тарасик Владимир Петрович, Егоров Александр Николаевич, Курстак Владислав Иосифович, Эйдлин Евгений Леонидович, Плякин Роман Владимирович, Горбатенко Николай Николаевич, Региня Владимир Владиславович
Текст
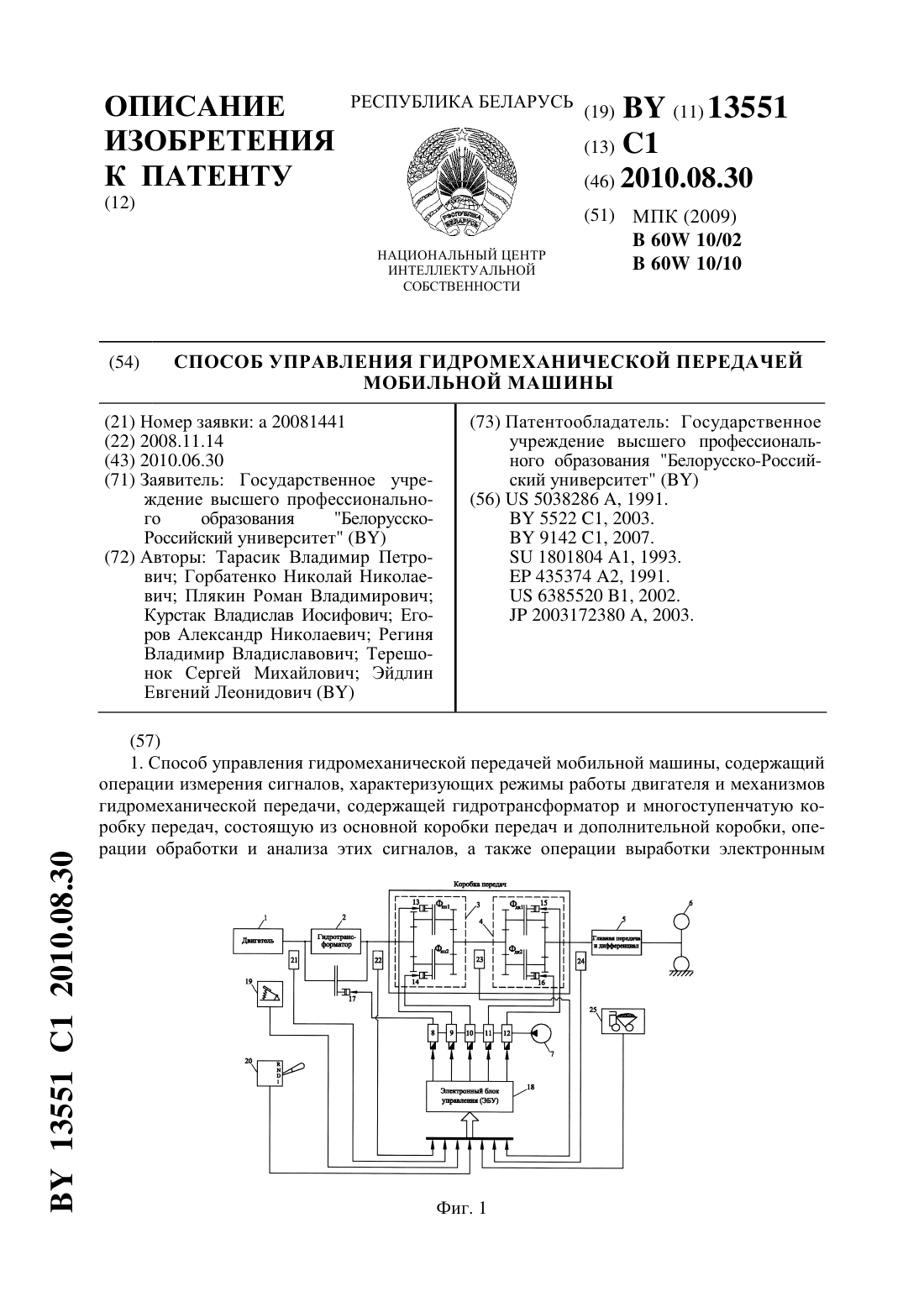
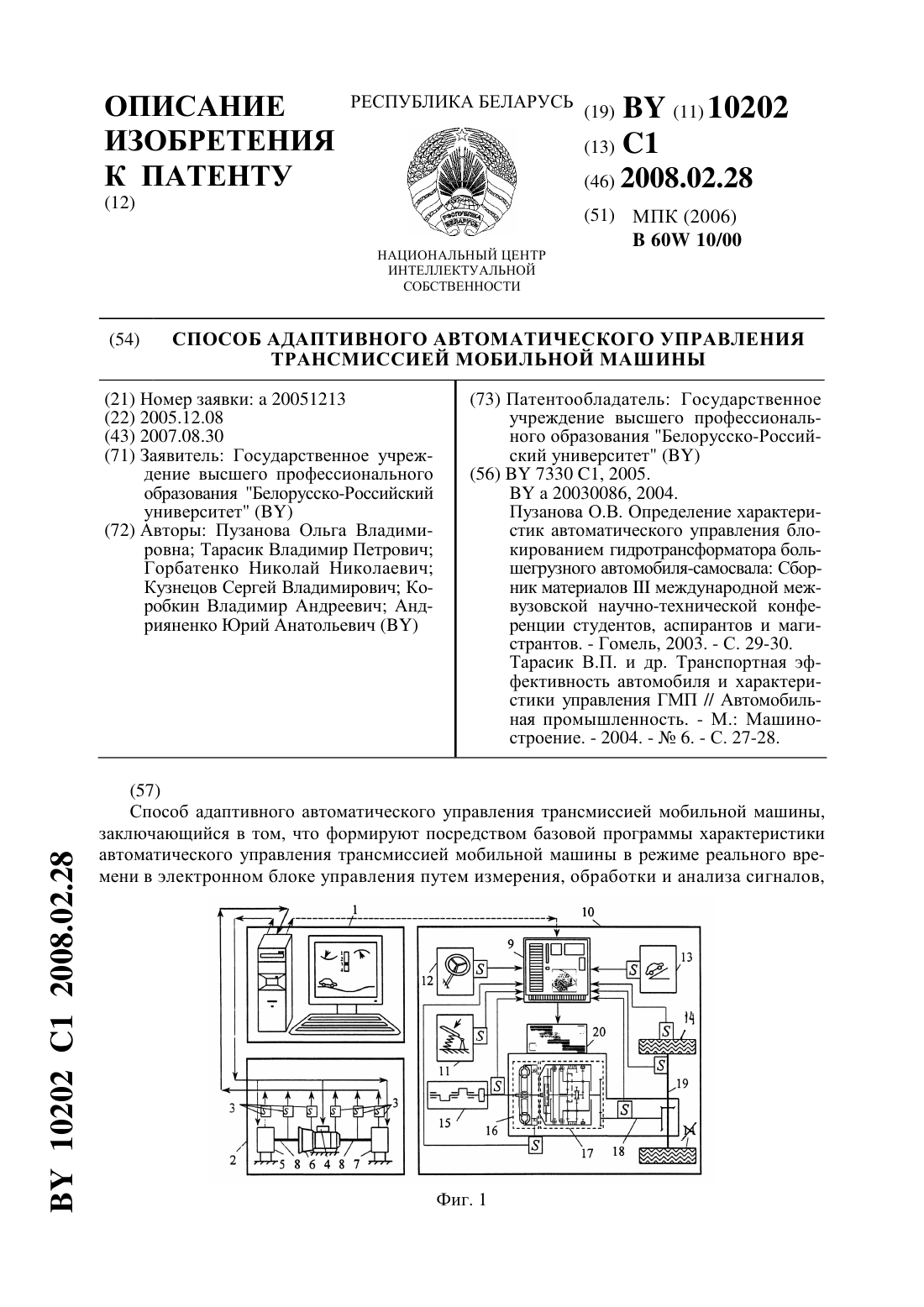
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ УПРАВЛЕНИЯ ГИДРОМЕХАНИЧЕСКОЙ ПЕРЕДАЧЕЙ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учреждение высшего профессионального образования БелорусскоРоссийский университет(72) Авторы Тарасик Владимир Петрович Горбатенко Николай Николаевич Плякин Роман Владимирович Курстак Владислав Иосифович Егоров Александр Николаевич Региня Владимир Владиславович Терешонок Сергей Михайлович Эйдлин Евгений Леонидович(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Способ управления гидромеханической передачей мобильной машины, содержащий операции измерения сигналов, характеризующих режимы работы двигателя и механизмов гидромеханической передачи, содержащей гидротрансформатор и многоступенчатую коробку передач, состоящую из основной коробки передач и дополнительной коробки, операции обработки и анализа этих сигналов, а также операции выработки электронным 13551 1 2010.08.30 блоком управления управляющих сигналов и их реализации исполнительным механизмом переключения передач и блокировки гидротрансформатора посредством электрогидравлических пропорциональных клапанов, осуществляющих управление давлением рабочей жидкости в гидроцилиндрах включаемых и выключаемых фрикционов, причем при переключении, по меньшей мере, одной из передач осуществляют выключение двух фрикционов предыдущей передачи и включение двух других фрикционов последующей передачи,по одному включаемому и одному выключаемому фрикциону в каждом из компонентов многоступенчатой коробки передач, отличающийся тем, что в момент выдачи электронным блоком управления сигнала на переключение передачи включают подачу рабочей жидкости одновременно в гидроцилиндры обоих включаемых фрикционов, обеспечивая при этом минимизацию разности интервалов времени их заполнения посредством управления давлением подачи, а величины давления в гидроцилиндрах фрикционов, подлежащих выключению, снижают до уровня, достаточного для предотвращения их проскальзывания затем по сигналу датчика обнаружения момента окончания заполнения гидроцилиндра включаемого фрикциона дополнительной коробки осуществляют программное управление пропорциональным клапаном его включения, одновременно соединяя со сливом полости гидроцилиндров обоих выключаемых фрикционов и гидроцилиндра фрикциона блокировки гидротрансформатора, а по сигналу датчика обнаружения момента окончания заполнения гидроцилиндра включаемого фрикциона основной коробки передач устанавливают в его гидроцилиндре давление, достаточное для реализации фрикционом момента трения заданной величины, не допускающей его замыкания затем в момент поступления сигнала обнаружения замыкания фрикциона дополнительной коробки осуществляют адаптивное управление включением фрикциона основной коробки передач посредством подачи на его пропорциональный клапан управляющего сигнала, формируемого электронным блоком управления с помощью пропорциональноинтегрально-дифференциального регулятора с обратной связью по отклонению относительной скорости скольжения фрикционных дисков включаемого фрикциона основной коробки передач от заданной эталонной характеристики. 2. Способ по п. 1, отличающийся тем, что минимизацию разности интервалов времени заполнения гидроцилиндров включаемых фрикционов основной коробки передач и дополнительной коробки осуществляют посредством корректировки величины давления рабочей жидкости, подаваемой в гидроцилиндр включаемого фрикциона основной коробки передач на этапе его заполнения, адаптируя значение давления к изменяющимся характеристикам процессов заполнения гидроцилиндров обоих включаемых фрикционов на основе учета величины разности моментов времени окончания заполнения гидроцилиндров в предыдущем цикле переключения передачи. Изобретение относится к области автотракторостроения и может быть использовано при создании адаптивных автоматических систем управления переключением передач в мобильных машинах с дизельным двигателем и гидромеханической передачей, содержащей гидротрансформатор и интегральную многоступенчатую коробку передач, состоящую из основной коробки передач и дополнительной коробки, каждая из которых имеет по несколько ступеней передаточных чисел, переключаемых посредством фрикционов с гидроприводом управления. Характерной особенностью интегральной коробки передач является то, что при одновременной смене ступеней в основной коробке передач и дополнительной коробке осуществляют выключение фрикционов предыдущих ступеней и включают фрикционы последующих ступеней. Процесс переключения передачи сопровождается соединением со сливом гидроцилиндров двух выключаемых фрикционов и заполнением рабочей жидко 2 13551 1 2010.08.30 стью под давлением гидроцилиндров двух других включаемых фрикционов, т.е. необходимо управлять одновременно четырьмя фрикционами. Это создает проблему обеспечения требуемого качества процесса переключения передач, от которого зависят важнейшие свойства машины плавность движения, комфортность работы оператора, динамика переходных процессов и связанная с ними механическая и термическая нагруженность элементов трансмиссии. В известном техническом решении 1 коробка передач состоит из двух последовательно расположенных многоступенчатых механических трансформаторов - вспомогательной коробки (вспомогательного механизма переключения передач) и основной коробки передач, передачи в которых переключают посредством фрикционов с гидроприводом управления, причем каждый фрикцион располагает клапаном для регулирования давления в его гидроцилиндре. При одновременном переключении ступеней вспомогательной коробки и основной коробки передач вначале приводят в действие клапан управления фрикционом вспомогательной коробки и заполняют его гидроцилиндр рабочей жидкостью, после подтверждения момента времени его заполнения осуществляют регулирование давления в этом гидроцилиндре согласно программе изменения момента трения фрикциона вспомогательной коробки. В момент времени заполнения гидроцилиндра фрикциона вспомогательной коробки приводят в действие клапан управления фрикционом основной коробки передач, а после окончания заполнения его гидроцилиндра осуществляют регулирование в нем давления. В результате фрикцион вспомогательной коробки замыкается раньше, чем фрикцион основной коробки передач. Недостатком этого способа управления является то, что работа трения включаемых фрикционов распределяется между ними неравномерно фрикцион вспомогательной коробки включается быстро, и работа трения его невелика, а большую часть суммарной работы трения выполняет тяжелонагруженный фрикцион основной коробки передач, что снижает его работоспособность вследствие высокой теплонапряженности фрикционных элементов. В известном техническом решении 2 гидромеханическая передача содержит гидротрансформатор, основную коробку передач и вспомогательную коробку, передачи в которых переключают фрикционами с гидроприводом управления, причем каждый фрикцион располагает клапаном для его включения и регулирования давления в его гидроцилиндре. Система управления гидромеханической передачей содержит датчики для измерения сигналов, характеризующих режимы работы двигателя и механизмов гидромеханической передачи, и электронный блок управления, формирующий сигналы управления клапанами включаемых и выключаемых фрикционов. При переключении передач вначале заполняют гидроцилиндр основной коробки передач, а в момент окончания его заполнения начинают регулировать давление в гидроцилиндре, и фрикцион начинает выполнять работу трения. В момент окончания заполнения гидроцилиндра основной коробки передач приводят в действие клапан управления фрикционом вспомогательной коробки и начинают заполнение гидроцилиндра этого фрикциона. По окончании его заполнения резко увеличивают в нем давление и фрикцион замыкается. Фрикцион же основной коробки передач продолжает выполнять работу трения, обусловленную необходимостью синхронизации угловых скоростей соединяемых элементов, поглощая кинетическую энергию вращающихся масс трансмиссии и энергию двигателя, передаваемую через трансмиссию. Недостаток этого способа управления заключается в том, что тяжелонагруженный фрикцион основной коробки передач выполняет значительно большую работу трения, чем фрикцион вспомогательной коробки, передающий намного меньший вращающий момент. Причем этот фрикцион вступает в работу раньше фрикциона вспомогательной коробки, а замыкается позже его. Это приводит к увеличению нагрева фрикционных элементов фрикциона основной коробки передач, ускоренному их износу и снижению срока службы,а также к увеличению потерь энергии в трансмиссии и снижению ее КПД. 3 13551 1 2010.08.30 Задачей настоящего изобретения является обеспечение высокого качества процесса переключения передач и повышение долговечности фрикционов гидромеханической передачи мобильной машины путем рационального распределения работы трения между включаемыми фрикционами основной коробки передач и дополнительной коробки посредством соответствующего управления изменением давления рабочей жидкости в гидроцилиндрах включаемых и выключаемых фрикционов и за счет этого достижение высоких технико-экономических показателей, повышение надежности гидромеханической передачи и улучшение комфортности работы оператора. Поставленная задача решается тем, что в способе управления гидромеханической передачей мобильной машины, содержащем операции измерения сигналов, характеризующих режимы работы двигателя и механизмов гидромеханической передачи, содержащей гидротрансформатор и многоступенчатую коробку передач, состоящую из основной коробки передач и дополнительной коробки, операции обработки и анализа этих сигналов, а также операции выработки электронным блоком управления управляющих сигналов и их реализации исполнительным механизмом переключения передач и блокировки гидротрансформатора посредством электрогидравлических пропорциональных клапанов, осуществляющих управление давлением рабочей жидкости в гидроцилиндрах включаемых и выключаемых фрикционов, причем при переключении, по меньшей мере, одной из передач осуществляют выключение двух фрикционов предыдущей передачи и включение двух других фрикционов последующей передачи, по одному включаемому и одному выключаемому фрикциону в каждом из компонентов многоступенчатой коробки передач, согласно изобретению, в момент выдачи электронным блоком управления сигнала на переключение передачи включают подачу рабочей жидкости одновременно в гидроцилиндры обоих включаемых фрикционов, обеспечивая при этом минимизацию разности интервалов времени их заполнения посредством управления давлением подачи, а величины давления в гидроцилиндрах фрикционов, подлежащих выключению, снижают до уровня, достаточного для предотвращения их проскальзывания затем по сигналу датчика обнаружения момента окончания заполнения гидроцилиндра включаемого фрикциона дополнительной коробки осуществляют программное управление пропорциональным клапаном его включения, одновременно соединяя со сливом полости гидроцилиндров обоих выключаемых фрикционов и гидроцилиндра фрикциона блокировки гидротрансформатора, а по сигналу датчика обнаружения момента окончания заполнения гидроцилиндра включаемого фрикциона основной коробки передач устанавливают в его гидроцилиндре давление, достаточное для реализации фрикционом момента трения заданной величины, не допускающей его замыкания затем в момент поступления сигнала обнаружения замыкания фрикциона дополнительной коробки осуществляют адаптивное управление включением фрикциона основной коробки передач посредством подачи на его пропорциональный клапан управляющего сигнала, формируемого электронным блоком управления с помощью пропорционально-интегрально-дифференциального регулятора с обратной связью по отклонению относительной скорости скольжения фрикционных дисков включаемого фрикциона основной коробки передач от заданной эталонной характеристики. Минимизацию разности интервалов времени заполнения гидроцилиндров включаемых фрикционов основной коробки передач и дополнительной коробки осуществляют посредством корректировки величины давления рабочей жидкости, подаваемой в гидроцилиндр включаемого фрикциона основной коробки передач на этапе его заполнения, адаптируя значение давления к изменяющимся характеристикам процессов заполнения гидроцилиндров обоих включаемых фрикционов на основе учета величины разности моментов времени окончания заполнения гидроцилиндров в предыдущем цикле переключения передачи. Характерная особенность предложенного способа управления гидромеханической передачей заключается в том, что заполнение гидроцилиндров обоих включаемых фрикционов производят синхронно во времени, а нагружение их моментами трения 4 13551 1 2010.08.30 рассредоточено по времени вначале работу трения совершает фрикцион дополнительной коробки, а после его замыкания - фрикцион основной коробки передач. Фрикционы дополнительной коробки передач передают гораздо большие вращающие моменты, чем фрикционы основной коробки передач, так как основная коробка передач имеет некоторое множество ступеней с передаточными числами больше единицы. Следовательно, фрикционы дополнительной коробки более нагруженные, чем фрикционы основной коробки передач. Предложенный способ управления гидромеханической передачей позволяет рационально распределить суммарную работу трения между обоими включаемыми фрикционами, что повышает их надежность и ресурс безотказной работы. Сущность изобретения поясняется рисунками. На фиг. 1 приведена структурная схема системы автоматического управления гидромеханической передачей на фиг. 2 - основные процедуры, выполняемые ЭБУ в процессе управления на фиг. 3-11 изображены циклограммы изменения параметров системы управления в процессе переключения передачи. Система автоматического управления гидромеханической передачей (САУ ГМП) мобильной машины содержит следующие элементы (фиг. 1) двигатель 1, гидротрансформатор 2, основную коробку передач 3, дополнительную коробку 4, главную передачу с дифференциалом 5, ведущие колеса машины 6, источник подачи рабочей жидкости под давлением 7 для управления фрикционами гидромеханической передачи, электрогидравлические пропорциональные клапаны 8, 9, 10, 11, 12 для регулирования рабочей жидкости в гидроцилиндрах фрикционов при их включении и выключении, гидроцилиндр 13 выключаемого фрикциона Фкп 1 и гидроцилиндр 14 включаемого фрикциона Фкп 2 основной коробки передач, гидроцилиндр 15 выключаемого фрикциона Фдк 1 и гидроцилиндр 16 включаемого фрикциона Фдк 2 дополнительной коробки, гидроцилиндр 17 фрикциона блокировки Фбл гидротрансформатора 2, электронный блок управления (ЭБУ) 18, систему датчиков для сбора информации датчик акселератора 19 датчик селектора 20 режимов управления ГМП датчики частоты вращения вала двигателя 21, турбины гидротрансформатора 22, промежуточного вала 23 и выходного вала 24 коробки передач датчик загрузки машины 25. Схема коробки передач показана фрагментарно и отражает лишь физическую сущность процессов преобразования и передачи энергии от двигателя к ведущим колесам при переключении одной пары передач, например, с низшей на высшую передачу. В основной коробке передач 3 и в дополнительной коробке 4 условно отображены лишь механизмы выключаемой и включаемой ступеней. Реальная коробка передач интегральной структуры, состоящая из совокупности основной коробки передач и дополнительной коробки,может быть любой кинематической схемы (вальной или планетарной) и содержать любое количество передач в каждом компоненте. Основные процедуры, выполняемые ЭБУ в процессе управления, показаны на фиг. 2. После пуска двигателя электронный блок управления осуществляет инициализацию запуска программы алгоритма (блок 1), загружает базу данных (блок 2), диагностирует состояние элементов системы (блок 3) и считывает информацию, доставляемую системой датчиков (блок 4). На основании полученной информации ЭБУ в соответствии со специальным алгоритмом определяет условия, оптимальные для осуществления переключения передач, и выдает сигнал на организацию переключения (блок 5). По этому сигналу запускается программа управления процессами включения и выключения соответствующих фрикционов коробки передач (блок 6). Программа управления процессами включения и выключения фрикционов гидромеханической передачи при переключении передач отображена циклограммами изменения параметров управления (фиг. 3-11). На циклограммах выделены три основных этапа процесса переключения передач этап заполнения гидроцилиндров включаемых фрикционов, соответствующий интервалу времени 0-2 этап регулирования момента трения включаемого фрикциона дополнительной коробки, соответствующий интервалу времени 2-3 5 13551 1 2010.08.30 этап регулирования момента трения включаемого фрикциона основной коробки передач,выполняемый на интервале времени 3-4. Кроме того, выделены два промежуточных этапа этап заполнения гидравлических магистралей и начального быстрого заполнения объема гидроцилиндров включаемых фрикционов, соответствующий интервалу времени 0-1 этап поддержания минимального момента трения фрикциона основной коробки передач,не допускающего его замыкания на интервале времени от момента окончания заполнения его гидроцилиндра 5 (или 5 ) до момента замыкания фрикциона дополнительной коробки 3. На фиг. 3 показано изменение давления дк 1, формируемое пропорциональным клапаном управления фрикционом дополнительной коробки Фдк 1, подлежащим выключению,на фиг. 4 - изменение давления рдк 2, формируемое пропорциональным клапаном управления включаемым фрикционом дополнительной коробки Фдк 2, а на фиг. 5 - изменение давления цдк 2 в гидроцилиндре фрикциона Фдк 2. На фиг. 6 изображено изменение давления ркп 1, формируемое пропорциональным клапаном управления фрикционом основной коробки передач Фкп 1, подлежащим выключению, на фиг. 7 - изменение давления ркп 2, формируемое пропорциональным клапаном управления включаемым фрикционом основной коробки передач Фкп 2, а на фиг. 8 - изменение давления рцкп 2 в гидроцилиндре фрикциона Фкп 2. На фиг. 9 показано изменение давления бл на выходе пропорционального клапана управления фрикционом Фбл блокировки гидротрансформатора при переключении передачи. На фиг. 10 показаны графики изменения относительных скоростей скольжения фрикционных дисков дк 2 включаемого фрикциона Фдк 2 дополнительной коробки и кп 2 включаемого фрикциона Фкп 2 основной коробки передач, а также график эталонной характеристики скорости скольжения э дисков фрикциона Фкп 2. На фиг. 11 изображено изменение вращающего момента Мкп на выходном валу коробки передач в процессе переключения передачи. В исходном состоянии системы управления гидромеханической передачей (фиг. 1) включены фрикционы коробки передач Фкп 1 и Фдк 1 и фрикцион Фбл блокировки гидротрансформатора 2, а фрикционы Фкп 2 и Фдк 2 выключены. В гидроцилиндрах 13, 15 и 17 включенных фрикционов Фкп 1, Фдк 1 и Фбл пропорциональные клапаны 9, 12 и 8 поддерживают номинальные значения давлений. При этом кинематическая цепь трансмиссии замкнута, что обеспечивает передачу потока энергии от двигателя 1 к ведущим колесам 6 через гидротрансформатор 2, основную коробку передач 3, дополнительную коробку 4 и главную передачу с дифференциалом 5. В момент времени 0 электронный блок управления 18 выдает сигнал на переключение передачи. По этому сигналу пропорциональные клапаны 9 и 12 управления фрикционами предыдущей передачи Фкп 1 и Фдк 1 снижают давление в гидроцилиндрах 13 и 15 этих фрикционов до заданного уровня, достаточного для предотвращения их проскальзывания при передаче через них вращающего момента. Фрикцион Фбл блокировки гидротрансформатора 2 при этом остается включенным и давление в его гидроцилиндре не изменяется,т.е. пропорциональный клапан 8 поддерживает в нем номинальное давление. В тот же момент времени 0 ЭБУ выдает электрические сигналы высокого уровня на обмотки электромагнитов пропорциональных клапанов 10 и 11, поэтому эти клапаны формируют высокие значения давлений в магистралях подачи рабочей жидкости в гидроцилиндры 14 и 16 фрикционов Фкп 2 и Фдк 2, предназначенных для включения последующей передачи. Это соответствует начальной фазе этапа заполнения гидроцилиндров на интервале времени 0-1 длительностью зап 1 (фиг. 3-11). Высокие уровни давлений рдк 2 (фиг. 4) и ркп 2(фиг. 7) на этой фазе обеспечивают быстрое заполнение магистралей подачи жидкости и высокую скорость перемещения поршней гидроцилиндров включаемых фрикционов. При этом может возникать небольшой всплеск давления жидкости в гидроцилиндрах (фиг. 5 и 8). Затем в момент времени 1 величина тока, подаваемого в обмотки электромагнитов пропорциональных клапанов 10 и 11 (фиг. 1), снижается, и они формируют более низкие 6 13551 1 2010.08.30 уровни давлений (фиг. 4 и ), в результате скорость заполнения гидроцилиндров включаемых фрикционов снижается, а давление в гидроцилиндрах в течение времени зап 2 плавно возрастает по мере перемещения их поршней и увеличения усилия сжатия возвратных пружин (фиг. 5 и 8). Это необходимо для снижения величины всплеска давлений в гидроцилиндрах включаемых фрикционов в момент окончания их заполнения. Давления рабочей жидкости, поддерживаемые пропорциональными клапанами 9 и 12 управления фрикционами Фкп 1 и Фдк 1 (фиг. 1) на этапе заполнения гидроцилиндров 14 и 16 либо остаются постоянными, как показано на фиг. 3 и 6, либо плавно снижаются до заданной величины, достаточной для предотвращения проскальзывания этих фрикционов. Момент времени 2 на фиг. 3-11 соответствует окончанию заполнения гидроцилиндра включаемого фрикциона Фдк 2 дополнительной коробки. В этот момент возникает всплеск давления цдк 2 в его гидроцилиндре (фиг. 5), обусловленный остановкой поршня, и начинается быстрое падение относительной скорости скольжения дисков дк 2 (фиг. 10), обусловленное нарастающим моментом трения фрикциона Фдк 2 вследствие сжатия его фрикционных дисков силой давления рабочей жидкости на поршень гидроцилиндра. Любой из этих сигналов может быть использован для обнаружения момента окончания заполнения гидроцилиндра включаемого фрикциона Фдк 2 дополнительной коробки. Всплеск давления цдк 2 (фиг. 5) обнаруживают датчиком или индикатором давления, а падение относительной скорости скольжения дисков дк 2 (фиг. 10) - с помощью датчиков частоты вращения 23 и 24 валов дополнительной коробки (фиг. 1). Значение дк 2 вычисляют с учетом передаточных чисел зубчатых колес дополнительной коробки, связывающих ведущие и ведомые диски фрикциона Фдк 2 с этими валами (фиг. 1). На этом первый этап программы управления переключением передачи завершают и начинают выполнять программу второго этапа управления - программу регулирования момента трения включаемого фрикциона Фдк 2 дополнительной коробки. При обнаружении момента окончания заполнения гидроцилиндра 16 фрикциона Фдк 2(фиг. 1) ЭБУ 18 запускает программу управления его пропорциональным клапаном 11,соответствующую этапу регулирования момента трения этого фрикциона в течение времени рдк 2, и одновременно выдает сигнал на выключение пропорциональных клапанов 9 и 12 управления фрикционами Фкп 1 и Фдк 1 и клапана 8 управления фрикционом блокировки Фбл гидротрансформатора, обнуляя значения токов в обмотках электромагнитов этих клапанов. Давления рабочей жидкости на выходах пропорциональных клапанов падают до нуля (фиг. 3, 6, 9) и остаются в дальнейшем на нулевом уровне до тех пор, пока не возникнет необходимость очередного переключения передачи или блокировки гидротрансформатора. Пропорциональные клапаны соединяют гидроцилиндры фрикционов Фкп 1,Фдк 1 и Фбл со сливом и выключают эти фрикционы. На интервале времени 2-3 ЭБУ осуществляет программное управление пропорциональным клапаном 11 фрикциона Фдк 2 дополнительной коробки 3 (фиг. 1), обеспечивая при этом быстрое его замыкание. Изменение регулируемого пропорциональным клапаном давления дк 2 отображено на фиг. 4, а изменение давления в гидроцилиндре цдк 2 фрикциона Фдк 2 - на фиг. 5. В момент времени 3 фрикцион Фдк 2 замыкается, поэтому ЭБУ выдает на обмотку электромагнита его пропорционального клапана номинальное значение силы тока, а клапан поднимает давление рдк 2 (фиг. 4) до номинального значения, устанавливая в гидроцилиндре фрикциона Фдк 2 также номинальное значение давления Рцдк 2 (фиг. 5), что предотвращает в дальнейшем его проскальзывание. Момент времени 3 замыкания фрикциона Фдк 2 обнаруживают по равенству нулю относительной скорости скольжения его дисков дк 2 (фиг. 10). В течение периода времени 2-3 фрикцион Фкп 2 основной коробки передач находится в состоянии готовности к процессу регулирования его момента трения. Для обеспечения такого состояния после заполнения гидроцилиндра фрикциона Фкп 2 в момент времени 5(фиг. 8) его пропорциональный клапан снижает давление на своем выходе до уровня 7 13551 1 2010.08.30 кн 2 (фиг. 7), а в гидроцилиндре фрикциона Фкп 2 при этом устанавливает давление на уровне 2 (фиг. 8), достаточном для реализации фрикционом момента трения заданной цкп минимальной величины, не допускающей его замыкания на интервале времени 2-3, когда осуществляется программное управление давлением включения фрикциона Фдк 2 дополнительной коробки (фиг. 4). Давление 2 немного превышает величину минимально необходимого давления в цкп гидроцилиндре для удержания поршня в состоянии полного заполнения полости гидроцилиндра, предотвращая тем самым возможность его опорожнения. Высокий темп нарастания давлений рдк 2 (фиг. 4) и цдк 2 (фиг. 5) приводит к быстрому падению относительной скорости скольжения дисков дк 2 фрикциона Фдк 2 дополнительной коробки и изменению величины и знака относительной скорости скольжения дисков кп 2 фрикциона Фкп 2 основной коробки передач (фиг. 10). При этом происходит реализация накопленной вращающимися массами основной коробки передач и дополнительной коробки кинетической энергии. В результате на интервале времени 2-3 не происходит существенного снижения вращающего момента кп на выходном валу коробки передач(фиг. 11), несмотря на то, что при этом момент трения фрикциона Фкп 2 основной коробки передач незначителен по величине. Следовательно, обеспечивается переключение передачи без разрыва потока мощности. В момент времени 3, соответствующий замыканию фрикциона Фдк 2, завершают второй этап программы управления переключением передачи и начинают выполнять программу третьего этапа управления - программу регулирования момента трения включаемого фрикциона Фкп 2 основной коробки передач в течение времени рпк 2. В момент обнаружения замыкания фрикциона Фдк 2 дополнительной коробки начинают осуществлять адаптивное управление моментом трения фрикциона Фкп 2 основной коробки передач. Электронный блок управления 18 с помощью ПИД-регулятора с обратной связью по параметру управления формирует электрический управляющий сигнал, подаваемый на обмотку электромагнита пропорционального клапана 10 управления фрикционом Фкп 2 (фиг. 1). Величины давления ркп 2 на выходе пропорционального клапана 10 и давления рцкп 2 в гидроцилиндре 14 фрикциона Фкп 2 пропорциональны величине тока в обмотке его электромагнита, а изменение этих давлений изображено на фиг. 7 и 8. Параметром управления ПИД-регулятора выбрано отклонение относительной скорости скольжения фрикционных дисков кп 2 включаемого фрикциона Фкп 2 основной коробки передач от эталонной скорости скольжения э (фиг. 10). График эталонной характеристики эможет иметь вид не только отрезка прямой, как показано на фиг. 10, но и любой другой вид, например, состоять из двух или более отрезков прямых или быть криволинейным. Параметры эталонной характеристики выбирают по критериям минимальности удельной работы трения фрикциона и динамических нагрузок на валах трансмиссии. В момент времени 4 относительная скорость скольжения дисков кп 2 фрикциона Фкп 2 становится равной нулю (фиг. 10), фрикцион замыкается, и ЭБУ выдает сигнал на повышение давления в его гидроцилиндре до номинального значения. При этом на обмотку электромагнита ЭБУ подает номинальную величину силы тока, а на выходе пропорционального клапана (фиг. 7) и в гидроцилиндре (фиг. 8) давление рабочей жидкости достигает номинальной величины. На этом процесс переключения передачи завершен. Благодаря плавному изменению момента трения фрикциона Фкп 2 всплеск вращающего момента Мкп на выходе коробки передач (фиг. 11) оказывается небольшим. Непрерывное положительное значение вращающего момента Мкп в течение всего процесса переключения передачи и небольшая величина его возрастания в момент замыкания фрикциона Фкп 2 обеспечивают плавное движение машины и непрерывный подвод энергии от двигателя к ведущим колесам. 8 13551 1 2010.08.30 Численные значения интервалов времени заполнения гидроцилиндра двух одновременно включаемых фрикционов будут практически всегда различными, даже в случае одинаковых объемов их гидроцилиндров. Поэтому при одновременном начале заполнения гидроцилиндров обоих включаемых фрикционов Фдк 2 и Фкп 2, как это предусмотрено в предлагаемом способе управления, моменты времени окончания их заполнения будут различны (фиг. 5 и 8) гидроцилиндр фрикциона Фдк 2 полностью заполнен в момент времени 2 (фиг. 5), а заполнение гидроцилиндра Фкп 2 завершится либо в момент времени 5, либо в момент времени 5 . Но для выполнения требования непрерывного подвода энергии двигателя к ведущим колесам машины в процессе переключения передачи необходимо, чтобы время 5 (или 5 ) не было больше времени 3, иначе на интервале времени, равном разнице между 5 и 3, энергия к ведущим колесам подводиться не будет. Кроме того, при этом возрастало бы максимальное значение вращающего момента Мкп и ухудшалась бы плавность движения машины. Слишком быстрое заполнение гидроцилиндра фрикциона Фкп 2 также нежелательно, так как при этом увеличивается интервал времени 5-3, в течение которого практически бесполезно затрачивалась бы энергия двигателя на совершение работы трения этого фрикциона и снижался бы КПД трансмиссии. Принимая во внимание, что интервал времени 2-3 буксования фрикциона Фдк 2 небольшой, практически целесообразно сближать моменты времени 5 и 2. С этой целью величину давления рабочей жидкости, подаваемой в гидроцилиндр включаемого фрикциона Фкп 2 основной коробки передач на этапе его заполнения, ЭБУ корректирует при каждом очередном переключении передачи на основе учета разности между моментами времени 5 и 2, зафиксированными на предыдущем цикле переключения передачи. В результате достигается адаптация величины давления, поддерживаемого пропорциональным клапаном 10 управления фрикционом Фкп 2 основной коробки передач (фиг. 1), к изменяющимся характеристикам процессов заполнения гидроцилиндров обоих включаемых фрикционов Фдк 2 и Фкп 2, обусловленных множеством факторов (температура рабочей жидкости, техническое состояние элементов системы управления - гидравлического насоса, распределителей, регуляторов, усилителей, гидроцилиндров фрикционов и др.). Источники информации 1. Патент РФ 2000965, МПК 5 В 60 К 41/00, 1993. 2. Патент США 5038286, МПК 5 В 60 К 41/02, 1991. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 11
МПК / Метки
МПК: B60W 10/02, B60W 10/10
Метки: мобильной, передачей, способ, машины, управления, гидромеханической
Код ссылки
<a href="https://by.patents.su/11-13551-sposob-upravleniya-gidromehanicheskojj-peredachejj-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Способ управления гидромеханической передачей мобильной машины</a>
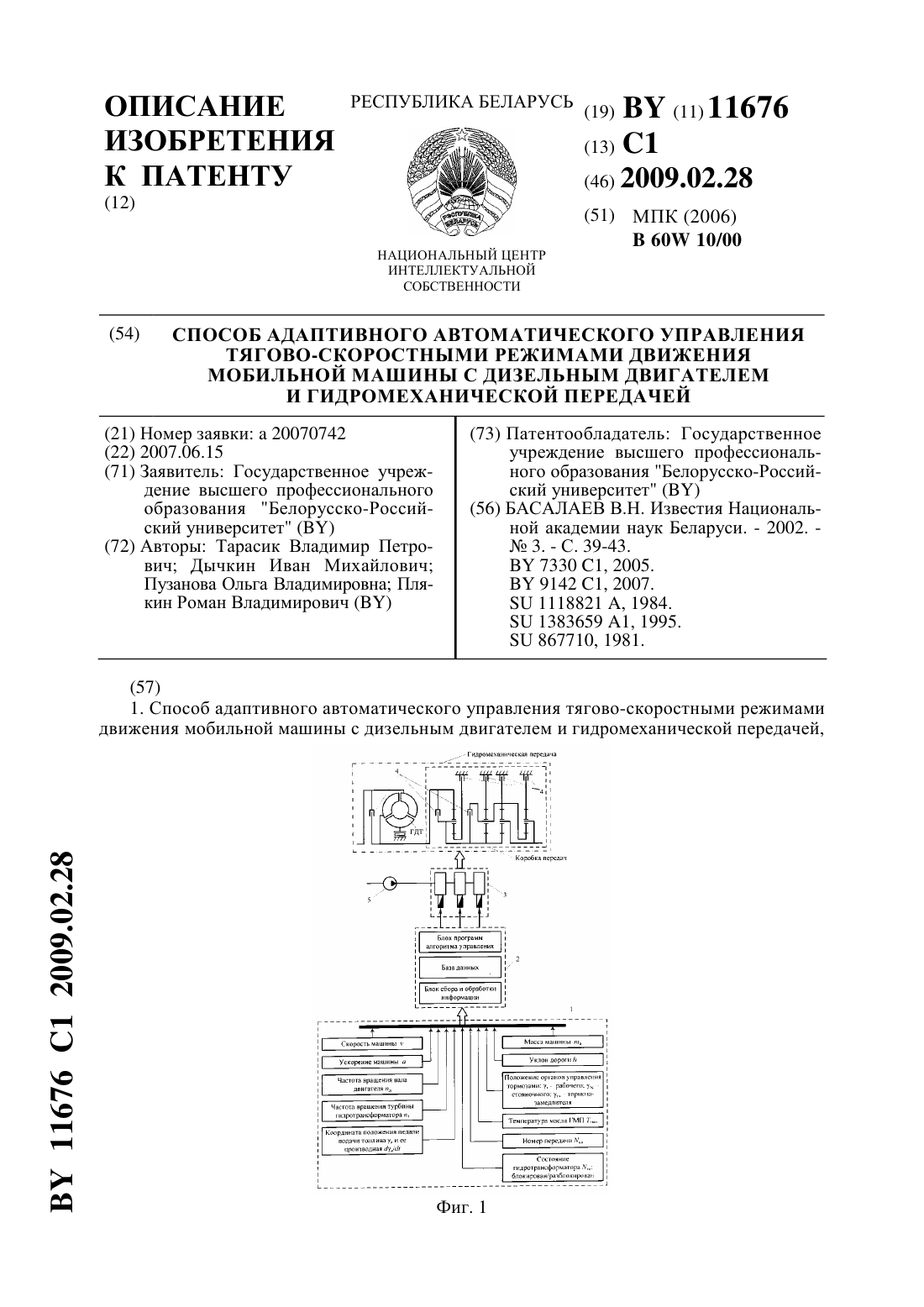
Способ адаптивного автоматического управления тягово-скоростными режимами движения мобильной машины с дизельным двигателем и гидромеханической передачей
Номер патента: 11676
Опубликовано: 28.02.2009
Авторы: Плякин Роман Владимирович, Дычкин Иван Михайлович, Тарасик Владимир Петрович, Пузанова Ольга Владимировна
МПК: B60W 10/00
Метки: управления, мобильной, адаптивного, передачей, автоматического, движения, режимами, тягово-скоростными, дизельным, гидромеханической, двигателем, способ, машины
Текст:
...автоматизированного управления переключением передач, обеспечивающих высокие показатели тягово-скоростных свойств мобильной машины с соответствующей нагрузкой в конкретных дорожных условиях. Регрессионные модели представляют собой простые алгебраические выражения и их использование в программе алгоритма управления существенно упрощает обработку и анализ информации о текущих значениях параметров движения машины и выработку информационных...
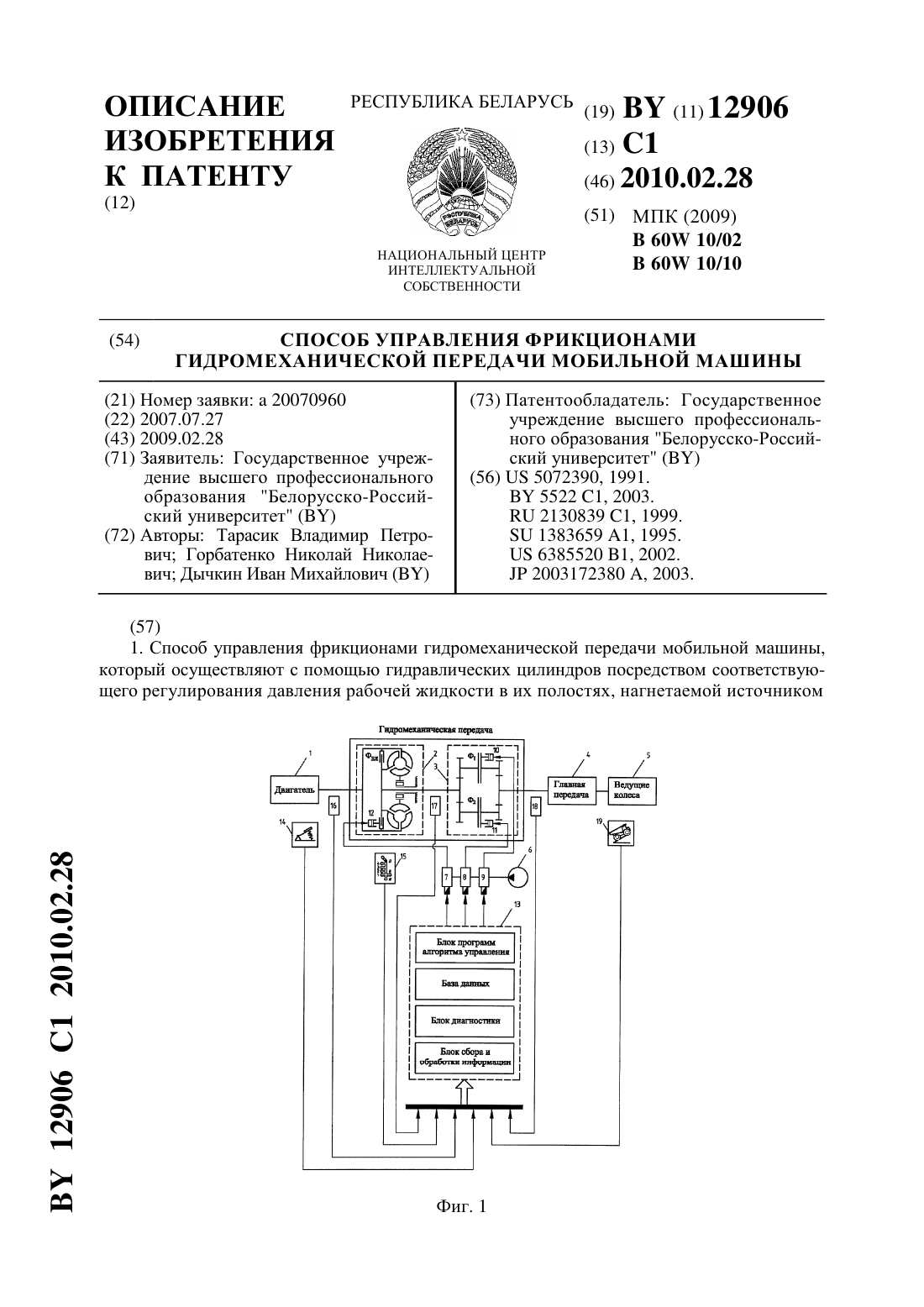
Способ управления фрикционами гидромеханической передачи мобильной машины
Номер патента: 12906
Опубликовано: 28.02.2010
Авторы: Тарасик Владимир Петрович, Дычкин Иван Михайлович, Горбатенко Николай Николаевич
МПК: B60W 10/02, B60W 10/10
Метки: машины, управления, мобильной, гидромеханической, фрикционами, способ, передачи
Текст:
...зубчатых механизмов коробки передач, расположенных между турбиной и включаемым фрикционом тф, а также между включаемым фрикционом и выходным валом коробки передач фвв. Вычисление сд осуществляют по формуле сдтввфвв, тф где т - частота вращения турбины гидротрансформатора, об/мин вв - частота вращения выходного вала коробки передач, об/мин. Величина с определяет погрешность выполнения эталонной характеристики скольжения. Минимизация...
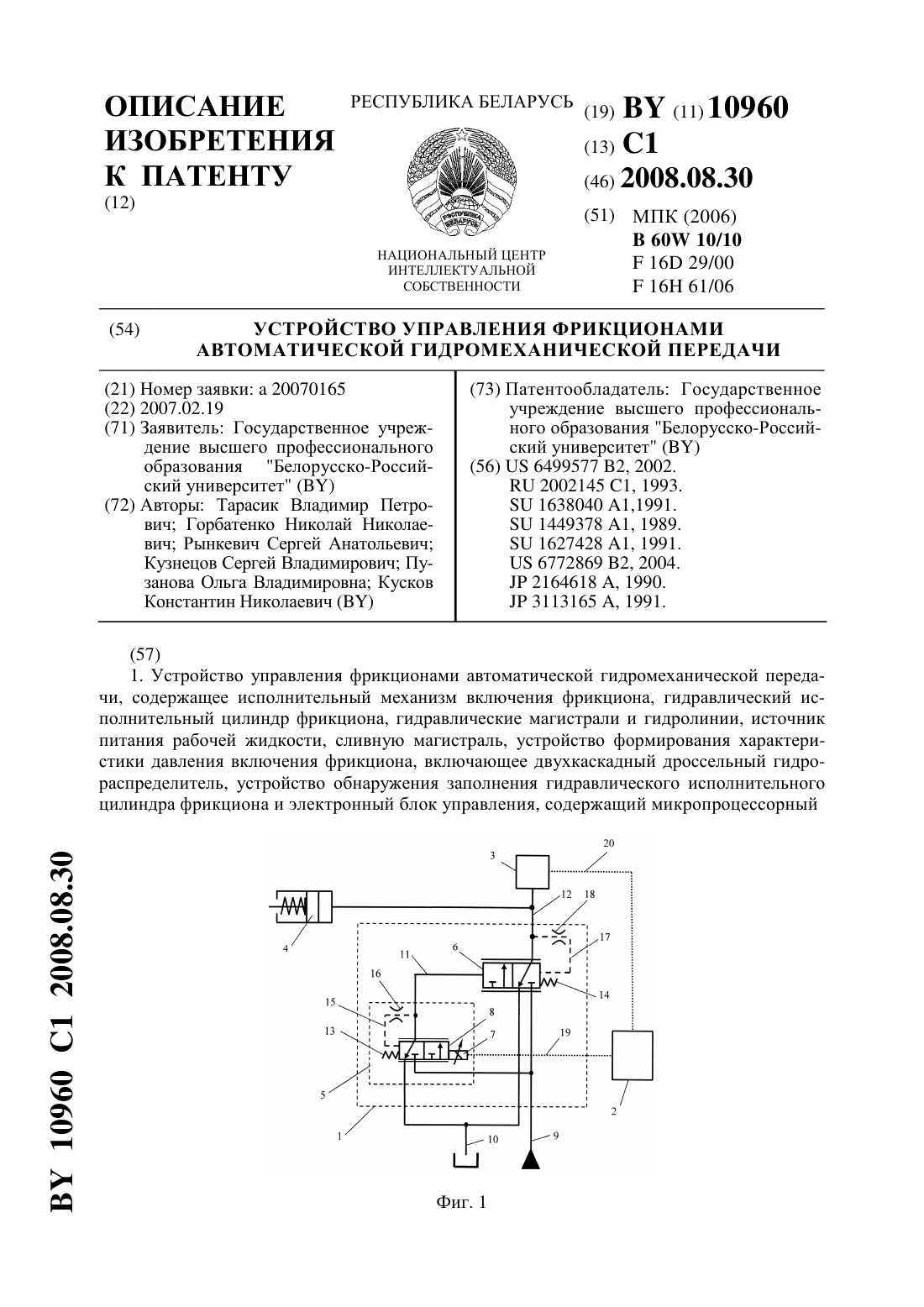
Устройство управления фрикционами автоматической гидромеханической передачи
Номер патента: 10960
Опубликовано: 30.08.2008
Авторы: Горбатенко Николай Николаевич, Пузанова Ольга Владимировна, Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич, Кусков Константин Николаевич, Кузнецов Сергей Владимирович
МПК: F16D 29/00, B60W 10/10, F16H 61/06...
Метки: фрикционами, устройство, управления, передачи, гидромеханической, автоматической
Текст:
...гидролинии с дросселем соединена с торцовой полостью дроссельного гидрораспределителя, при этом электрогидравлический пропорциональный клапан выполнен с возможностью формирования гидравлического сигнала для управления дроссельным гидрораспределителем, а электронный блок управления выполнен с возможностью регулирования давления в гидравлическом цилиндре фрикциона по заданной характеристике, например линейной, путем изменения величины силы тока...
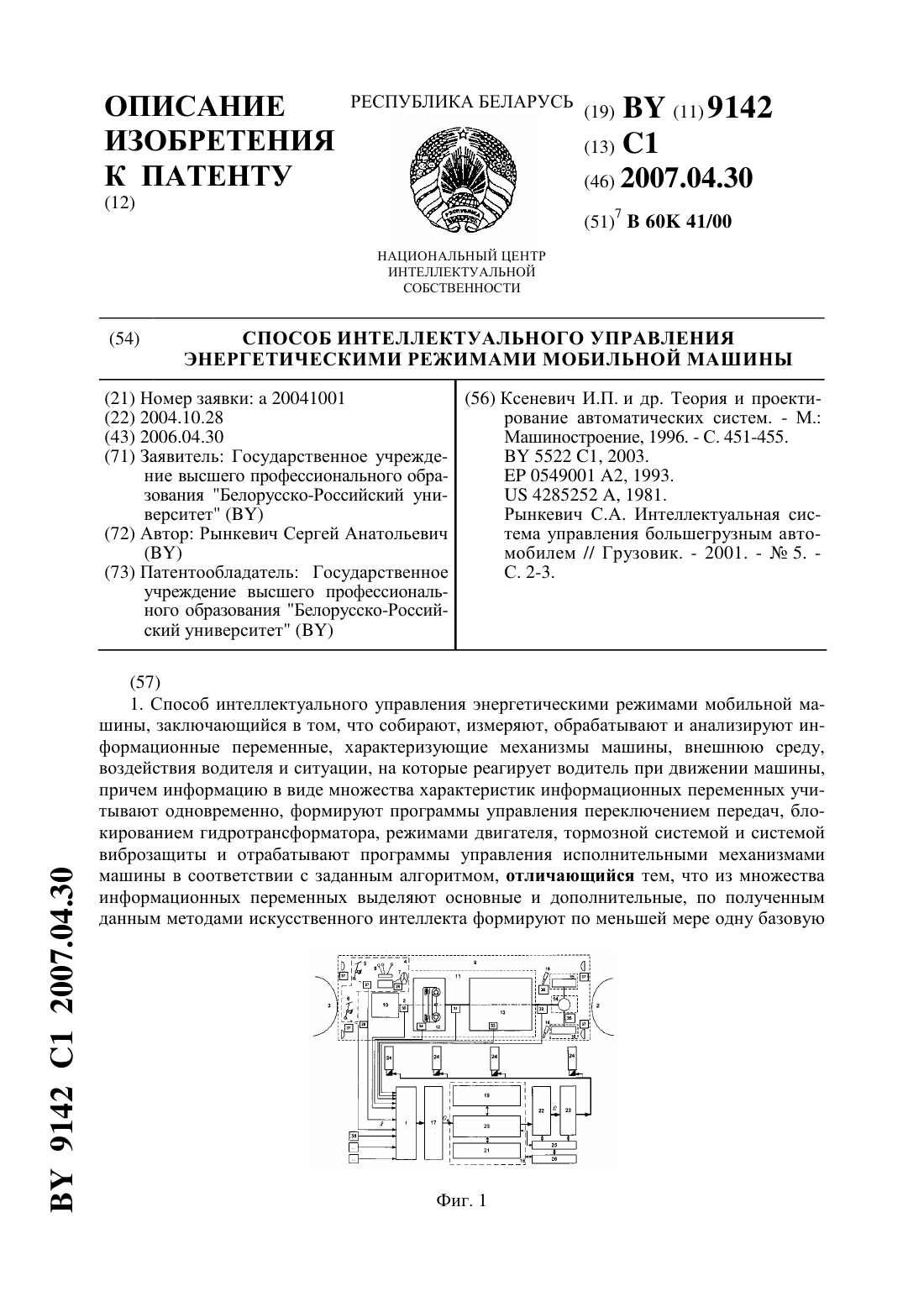
Способ интеллектуального управления энергетическими режимами мобильной машины
Номер патента: 9142
Опубликовано: 30.04.2007
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/00
Метки: энергетическими, интеллектуального, управления, режимами, мобильной, машины, способ
Текст:
...36 в амортизаторах системы виброзащиты, температуры и давления масла двигателя, температуры и давления масла в трансмиссии, давления жидкости во фрикционах переключения передач, давления во впускном трубопроводе (группа б), сканирования и визуализации 37 местности, характеристик макро- и микропрофиля дороги 38, состояния опорной поверхности, продольного и поперечного уклона (группа в). Информация о ситуациях косвенно формируется благодаря...
Способ адаптивного автоматического управления трансмиссией мобильной машины
Номер патента: 10202
Опубликовано: 28.02.2008
Авторы: Коробкин Владимир Андреевич, Пузанова Ольга Владимировна, Кузнецов Сергей Владимирович, Тарасик Владимир Петрович, Андрияненко Юрий Анатольевич, Горбатенко Николай Николаевич
МПК: B60W 10/00
Метки: автоматического, адаптивного, машины, мобильной, трансмиссией, способ, управления
Текст:
...Этого можно достичь предварительным моделированием движения мобильной машины во всем многообразии возможных условий эксплуатации. Оперативное управление трансмиссией мобильной машины возможно при минимизации логических и вычислительных процедур. Способ 3 10202 1 2008.02.28 предполагает определение моментов переключения передач и блокирования/разблокирования гидротрансформатора на основе организации логической процедуры выбора регрессионных...
Предыдущий патент: Способ изготовления осесимметричной слоистой ступенчатой детали
Следующий патент: Контактное устройство для тепломассообменных аппаратов
Случайный патент: Датчик угла поворота рулевого колеса автомобиля