Система адаптивного интеллектуального управления энергетическими режимами мобильной машины
Номер патента: U 3421
Опубликовано: 30.04.2007
Авторы: Тарасик Владимир Петрович, Андрияненко Юрий Анатольевич, Рынкевич Сергей Анатольевич, Коробкин Владимир Андреевич

Текст
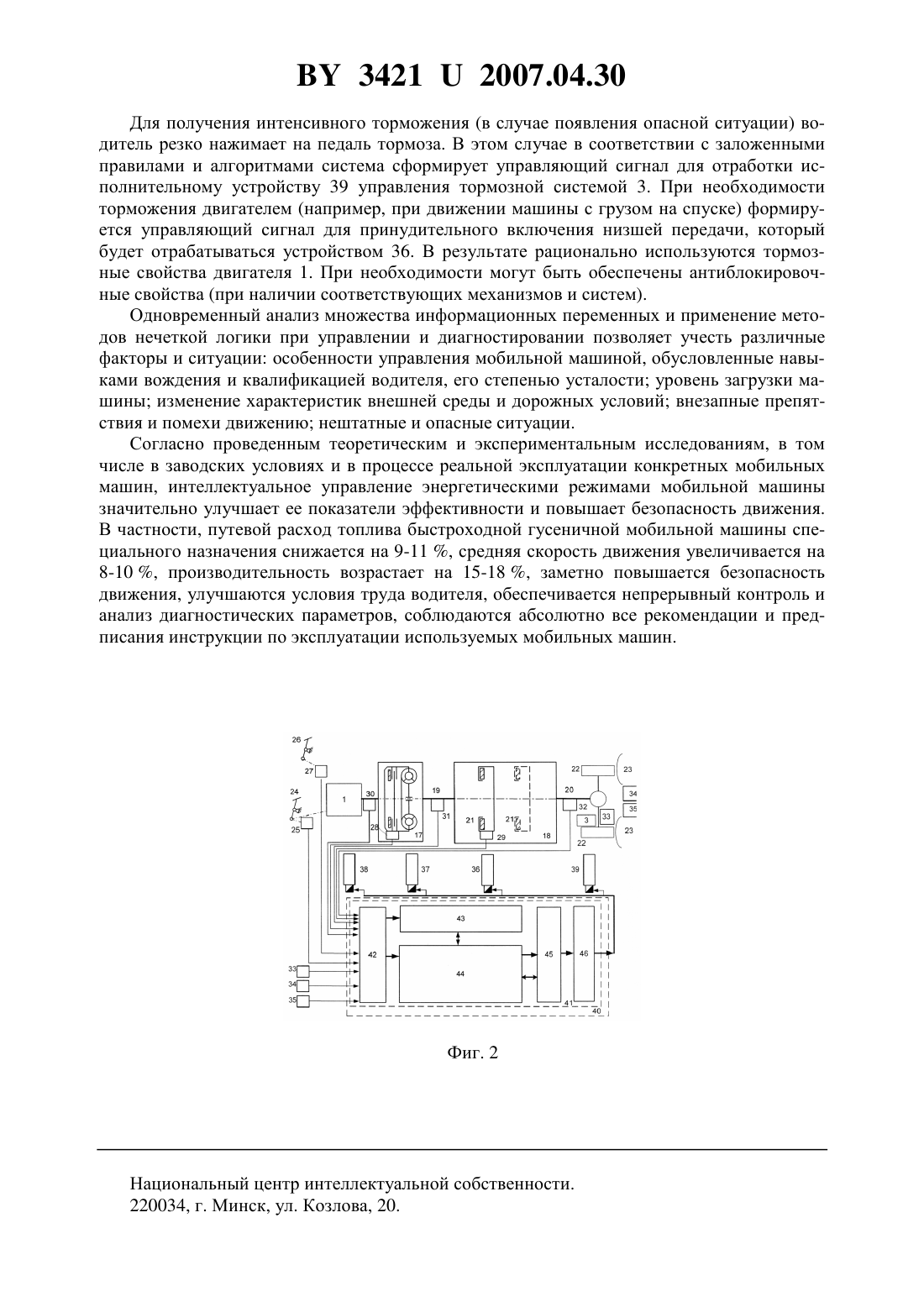
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА АДАПТИВНОГО ИНТЕЛЛЕКТУАЛЬНОГО УПРАВЛЕНИЯ ЭНЕРГЕТИЧЕСКИМИ РЕЖИМАМИ МОБИЛЬНОЙ МАШИНЫ(71) Заявитель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(72) Авторы Тарасик Владимир Петрович Коробкин Владимир Андреевич Рынкевич Сергей Анатольевич Андрияненко Юрий Анатольевич(73) Патентообладатель Государственное учреждение высшего профессионального образования Белорусско-Российский университет(57) 1. Система адаптивного интеллектуального управления энергетическими режимами мобильной машины, содержащая двигатель с подсистемой управления его режимами и выходным валом, гидротрансформатор с турбинным колесом и муфтой блокирования,трансмиссию, включающую коробку передач с входным и выходным валами и фрикционными муфтами переключения передач, тормозную систему, колеса, взаимодействующие с опорной поверхностью дороги, педаль акселератора с датчиком положения педали, педаль тормоза с датчиком положения педали, датчики состояния фрикционных муфт и муфты блокирования гидротрансформатора, датчики угловых скоростей вала двигателя, турбинного колеса гидротрансформатора и выходного вала коробки передач, датчики уклона дороги и состояния микропрофиля поверхности дороги, датчик скорости мобильной машины, исполнительные устройства переключения передач, блокирования гидротрансформатора, управления режимами двигателя и тормозной системой, отличающаяся тем, что она содержит центральный процессор, выполненный в виде интеллектуального контроллера, реализующий технологии нечеткой логики, со входами и выходами, имеющий блок ввода и идентификации информационных сигналов со входами и выходами, блок базы 34212007.04.30 знаний, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и идентификации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей валов, скорости мобильной машины, уклона и состояния микропрофиля, выход - с логическим блоком и блоком базы знаний, блок вывода решений связан с логическим блоком и блоком формирования управляющих сигналов, а блок базы знаний выполнен с возможностью взаимодействия с логическим блоком, причем блок формирования управляющих сигналов связан с исполнительными устройствами переключения передач, блокирования гидротрансформатора, управления режимами двигателя и тормозной системы и выполнен с возможностью формирования адаптивных управляющих сигналов для соответствующих устройств. 2. Система адаптивного интеллектуального управления энергетическими режимами мобильной машины по п. 1, отличающаяся тем, что логический блок и блок вывода решений двусторонне взаимосвязаны и выполнены с возможностью формирования как управляющих сигналов, так и диагностических сигналов для контроля состояния механизмов мобильной машины, при этом диагностические сигналы могут подвергаться дополнительной обработке в интеллектуальном контроллере центрального процессора. 3. Система адаптивного интеллектуального управления энергетическими режимами мобильной машины по п. 1, отличающаяся тем, что интеллектуальный контроллер выполнен с возможностью функционирования в режиме реального времени.(56) 1. Патент 2010734 С 1, МПК В 60 К 41/06 // Бюл.7. - 1994. 2. Патент 5389050 А, МПК В 60 К 41/06, опубл. 14.02. 1995. 3. Патент ЕР 0588417 В 1, МПК В 60 К 41/06, опубл.94/12, 23.03. 1994. Полезная модель относится к транспортному машиностроению и может быть использована при проектировании систем автоматического управления различными транспортными средствами, обеспечивая им высокие технико-экономические показатели, безопасность и надежность для всех эксплуатационных режимов. Известна система автоматического управления скоростными и нагрузочными режимами, которая осуществляет управление энергетическими режимами машины путем измерения и обработки информационных сигналов датчиков скорости и нагрузки, формировании на их основе управляющих воздействий в виде характеристик управления переключением передач, блокированием гидротрансформатора и двигателем и отработки сформированных управляющих сигналов соответствующими исполнительными механизмами 1. Недостатком системы является невысокая надежность управления из-за сложности и громоздкости построения системы на логических элементах дискретной автоматики. Системы, построенные на таких элементах, имеют также недостаточное быстродействие в процессе управления мобильной машиной в сложных условиях, изобилующих опасными и нештатными ситуациями. Недостатком является и то, что программа управления энергетическими режимами,закладываемая в подобную систему для управления трансмиссией и двигателем, реализуемая исполнительными механизмами, является неадаптивной и не может быть изменена при реализации алгоритма управления в процессе эксплуатации мобильной машины. Известна система автоматического управления трансмиссией машины, использующая такой метод интеллектуальных технологий, как нечеткая логика 2. Недостатком системы и реализованного в ней способа управления энергетическими режимами является невозможность учета и анализа особенностей управления мобильной 2 34212007.04.30 машиной, обусловленных стилем и навыками вождения, квалификацией водителя, его степенью усталости и т.д. уровня загрузки машины изменения всего многообразия параметров и характеристик внешней среды и дорожных условий внезапных препятствий движению, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций, требующих достаточно точных и быстрых решений по управлению. Данный недостаток снижает эффективность автоматического управления и безопасность движения. Недостатком данной системы является то, что реализованный в ней алгоритм управления неадаптивен и не предусматривает коррекцию управляющих сигналов в зависимости от изменения скоростных и нагрузочных режимов двигателя, характеристик трансмиссии, тормозной системы и других механизмов при различной степени загрузки машины, при изменении дорожных условий, маршрутов движения, продольного профиля дороги и других факторов. В результате, в случае изменения названных факторов, переключения передач в трансмиссии будут осуществляться не по оптимальным для текущих эксплуатационных условий характеристикам. Отмеченный недостаток значительно снижает тягово-экономические показатели мобильной машины. Недостатком системы является также то, что сформированные ею управляющие сигналы являются однозначными (жесткими) и не способны изменять свои значения в процессе движения мобильной машины в реальных условиях, которые характеризуются многообразными ситуациями и всевозможными ограничениями. В результате программа управления системы не имеет возможности приспосабливаться к сложности условий эксплуатации и трансформировать свои характеристики. В то же время, согласно теоретическим и экспериментальным исследованиям, при реализации адаптивного управления должны сформировываться управляющие сигналы, корректирующие базовые характеристики управления по отношению к программным значениям. В противном случае - как и во всех вышеупомянутых системах - значения управляющих сигналов останутся неизменными и будут равны исходным запрограммированным базовым значениям. Преждевременное переключение передачи в мобильной машине в таком случае будет необоснованным и недопустимым. Такие переключения передач приводят к увеличению динамических нагрузок в элементах трансмиссии и двигателя, а в некоторых случаях и выходу из строя деталей и механизмов. Отмеченный недостаток снижает надежность управления,уменьшает ресурс и эффективность мобильной машины, снижает безопасность движения и ухудшает условия труда водителя.Хотя в данной системе и применяется нечеткая логика, использующая нечеткие рассуждения, позволяющие сформировать логический вывод о включении нужной передачи на основе анализа информации от различных датчиков (положения педали акселератора, скорости мобильной машины, скорости вращения коленчатого вала двигателя,сигнализатора включенной передачи), ее использование неэффективно. Это связано с тем,что нечеткая логика помогает осуществлять управление только трансмиссией, хотя в процессе переключений передач необходимо комплексное управление трансмиссией, двигателем и тормозной системой, т.е. энергетическими режимами мобильной машины в целом. Данный недостаток не позволяет, во-первых, улучшить качество переходных процессов в трансмиссии и снизить динамические нагрузки, а во-вторых, снижает безопасность движения. Другим недостатком является то, что данная система не обеспечивает важные защитные мероприятия. Например, при эксплуатации гусеничной машины, карьерного автосамосвала, строительно-дорожной или специальной машины при преодолении подъемов или затяжных спусков должны осуществляться запреты на включение высших передач, а также должны быть предусмотрены ограничения скоростного режима (чего не предусмотрено в этой и подобных системах). При появлении внезапных препятствий и помех движению (например транспортных или живых объектов, придорожных сооружений и т.д.) должны быть выполнены своевременные мероприятия по экстренному тормо 3 34212007.04.30 жению (чего упомянутые системы не реализуют). Отмеченный недостаток снижает безопасность движения. Недостатком является также недостаточное количество используемых информационных переменных и диагностических параметров, учитывающих изменение характеристик трансмиссии, двигателя, управляющих воздействий водителя, внешней среды и всевозможных ситуаций. В то же время, согласно результатам научных исследований и практическим данным, для обеспечения эффективного адаптивного управления машиной и контроля ее механизмов их число должно более десяти. В упомянутой же системе используется малое количество переменных, что является необоснованным и снижает эффективность управления и контроля. Известна система, основанная на использовании нечеткой логики, для осуществления планирования переключения передач автоматической трансмиссии 3. Недостатками данной системы является малое количество используемых продукционных правил - всего по пять для переключения на высшие и низшие передачи Вместе с тем таких правил должно быть гораздо больше, чтобы как можно полнее охватить разнообразие условий, протекающих в процессе функционирования системы. Отмеченный недостаток снижает эффективность управления. Недостатком системы является то, что в ней не обеспечивается повышение качества переходных процессов при переключении передач путем управления режимами двигателя. Так, в процессе переключений на высшие передачи необходимо уменьшать скоростной режим двигателя с целью снижения динамических нагрузок в трансмиссии. Недостатком системы является и то, что она использует недостаточное количество информационных переменных. В то же время, для управления энергетическими режимами необходимо дополнительно учитывать положение педали тормоза, степень загрузки машины грузом и величину уклона продольного профиля дороги, что очень важно при автоматизации управления большегрузными автомобилями-самосвалами, городскими автобусами и другими транспортными средствами для более полного учета различных режимов и ситуаций. Данный недостаток снижает эффективность управления. Недостатком является также невысокая степень адаптивности системы, невозможность управления мобильной машиной и диагностирования ее механизмов в режиме реального времени. Недостатком всех упомянутых систем является то, что в них не осуществляется оптимизация характеристик и параметров. Например, при изменении маршрута эксплуатации машины или смене трассы движения оптимальные характеристики управления энергетическими режимами должны быть изменены по сравнению с оптимальными характеристиками, ранее определенными для предыдущего маршрута. Обычно для определения оптимальных характеристик управления проводят имитационное моделирование и оптимизацию в лабораторных условиях. Это занимает слишком много времени и требует проведения большого объема вычислительных процедур. На современных мобильных машинах устанавливают бортовые ЭВМ и процессоры с огромными возможностями управления, диагностирования и контроля (наличие достаточной памяти, требуемого быстродействия компьютера, использование интеллектуальных информационных технологий), поэтому задача оптимизации непосредственно на мобильной машине в реальных условиях становится вполне достижимой. Рассмотренные же выше системы управления и реализуемые в них способы управления не позволяют осуществлять процедуры оптимизации характеристик в реальных условиях эксплуатации мобильной машины. Отмеченный недостаток снижает эффективность интеллектуального управления и не позволяет реализовать потенциальные возможности в связи с появлением современных методов получения, обработки, представления и передачи информации. Задачами настоящей полезной модели являются повышение надежности управления,значительное расширение функциональных возможностей систем автоматического управления энергетическими режимами мобильных машин, улучшение показателей эффектив 4 34212007.04.30 ности мобильных машин и качества переходных процессов, а также повышение безопасности движения и улучшение условий труда водителя. Указанные задачи достигаются тем, что система интеллектуального управления энергетическими режимами мобильной машины, содержащая двигатель с подсистемой управления его режимами и выходным валом, гидротрансформатор с турбинным колесом и муфтой блокирования, трансмиссию, включающую коробку передач с входным и выходным валами и фрикционными муфтами переключения передач, тормозную систему, колеса, взаимодействующие с опорной поверхностью дороги, педаль акселератора с датчиком положения педали, педаль тормоза с датчиком положения педали, датчики состояния фрикционных муфт и муфты блокирования гидротрансформатора, датчики угловых скоростей вала двигателя, турбинного колеса гидротрансформатора и выходного вала коробки передач, датчики уклона дороги и состояния микропрофиля поверхности дороги, датчик скорости мобильной машины, исполнительные устройства переключения передач,блокирования гидротрансформатора, управления режимами двигателя и тормозной системой, согласно полезной модели, содержит центральный процессор, выполненный в виде интеллектуального контроллера, реализующий технологии нечеткой логики, со входами и выходами, имеющий блок ввода и идентификации информационных сигналов со входами и выходами, блок базы знаний, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и идентификации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей валов, скорости мобильной машины, уклона и состояния микропрофиля, выход с логическим блоком и блоком базы знаний, блок вывода решений связан с логическим блоком и блоком формирования управляющих сигналов, а блок базы знаний выполнен с возможностью взаимодействия с логическим блоком, причем блок формирования управляющих сигналов связан с исполнительными устройствами переключения передач, блокирования гидротрансформатора, управления режимами двигателя и тормозной системы и выполнен с возможностью формирования адаптивных управляющих сигналов для соответствующих устройств. При этом логический блок и блок вывода решений двусторонне взаимосвязаны и выполнены с возможностью формирования как управляющих сигналов,так и диагностических сигналов для контроля состояния механизмов мобильной машины,при этом диагностические сигналы могут подвергаться дополнительной обработке в интеллектуальном контроллере центрального процессора. Кроме того, интеллектуальный контроллер выполнен с возможностью функционирования в режиме реального времени. Достижение поставленных задач обеспечивается применением системы, включающей центральный процессор или бортовой компьютер, который выполняется в виде интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и идентификации информационных сигналов, блок базы знаний, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза,угловых скоростей валов, скорости транспортного средства, уклона и состояния микропрофиля, выход - с логическим блоком, а блок базы данных и правил выполнен с возможностью взаимодействия с логическим блоком, причем блок формирования управляющих сигналов связан с исполнительными устройствами переключения передач, блокирования гидротрансформатора, управления режимами двигателя и тормозной системы. Такая структура системы позволяет наилучшим образом принимать, представлять, обрабатывать и передавать информацию, формировать оптимальные управляющие сигналы в режиме реального времени и адаптировать алгоритмы управления энергетическими режимами автомобиля с учетом изменения всевозможных факторов и ситуаций. Сущность полезной модели поясняется рисунками. На фиг. 1 приведена схема мобильной машины в реальных условиях движения. На фиг. 2 представлена система адаптивного интеллектуального управления энергетическими режимами мобильной машины. 5 34212007.04.30 На фиг. 1 условно показана мобильная машина, снабженная двигателем 1, трансмиссией 2, включающей гидротрансформатор с коробкой передач (не показаны), и тормозной системой 3, которая эксплуатируется в условиях внешней среды 4. Для измерения информационных параметров характеристик управляющих воздействий водителя, энергетических режимов мобильной машины и внешней среды установлены датчики угловой скорости двигателя 5, трансмиссионных элементов (турбинного колеса гидротрансформатора и выходного вала коробки передач) 6, скорости 7 мобильной машины, характеристик макрои микропрофиля поверхности дороги 8 (уклона, коэффициента сопротивления и т.д.). Управляющие воздействия водителя фиксируются датчиками положения педалей акселератора и тормоза (на схеме условно не показаны). Собираемая датчиками информация поступает в блок обработки информации и принятия решений 9 и блок управления 10, формирующий управляющие сигналы соответствующим исполнительным механизмам 11 управления трансмиссией 2, двигателем 1 и тормозной системой 3. Информационные переменные, поступающие от блока 9 по каналу 12 в блок 13, где они представляются функциями принадлежности методами теории нечетких множеств и далее по каналу 14 поступают в нечеткий контроллер 15. На основании хранящейся в нем базы данных и правил с учетом текущей информации контроллер 15 вырабатывает корректирующие управляющие сигналы, которые по каналу 16 поступают в блок управления 10. Блок управления 10 с учетом заложенной в нем базовой программы и корректирующих сигналов нечеткого контроллера 15 формирует адаптивную программу управления,которая отрабатывается исполнительными механизмами 11. Нечеткий контроллер 15 выполнен с возможностью реализации операций нечеткой логики управления, которые могут осуществляться различными комбинациями в зависимости от реализуемых алгоритмов. На основе модели мобильной машины (ММ), учитывающей характеристики механизмов и подсистем машины - двигателя (Д), коробки передач (КП), тормозной системы (ТС),внешней среды и управляющих воздействий водителя с помощью процедур оптимизации осуществляется формирование базовой программы управления. Базовая программа представляет собой характеристики управления переключением передач и блокировкой гидротрансформатора, которые могут быть построены в поле информационных переменных положение педали акселератора - угловая скорость вращения турбинного колеса гидротрансформатора (а - т), а также характеристики управления скоростными режимами двигателя в переходных процессах (характеристика изменения величины топливо-подачисо своим знаком) и тормозными режимами. Далее сформированная базовая программа адаптируется к реальным условиям движения мобильной машины. Для того чтобы повысить потенциальные возможности интеллектуального управления и показатели эффективности автотранспортного средства, способ предусматривает осуществление операций трансформации программы и модели. Операция трансформации программы заключается в дополнительной коррекции программы, что необходимо в случае возникновения новых обстоятельств, ситуаций и факторов, не учтенных ранее. Данные обстоятельства могут заноситься в базу данных системы водителем, оператором и т.д., а могут формироваться и накапливаться в процессе обучения. Операция трансформации модели заключается в изменении структуры модели при изменении условий эксплуатации(смена маршрута и т.д.) или характеристик механизмов автомобиля (изменение характеристик двигателя, износ фрикционных элементов и т.д.). Обработка, представление информации и получение управляющих решений на стадии трансформации программы и модели осуществляется с помощью операций нечеткого управления. Процедуры нечеткого контроллера, основанные на теории нечетких множеств и реализующие нечеткую логику управления, включают в себя фаззификацию (приведение к нечеткости), базу продукционных правил и дефаззификацию (преобразование в четкое 6 34212007.04.30 решение). В результате выполнения данных процедур вектор входных сигналовпреобразуется в вектор выходных сигналов. База продукционных правил содержит продукционные правила, которые регламентируют процесс получения выходного решения(функций принадлежности заключений) в зависимости от различных сочетаний информационных параметров (функций принадлежности предпосылок). Количество продукционных правил целесообразно принимать 15-30. Число правил может быть увеличено либо уменьшено в зависимости от назначения системы и типа решаемых задач. Адаптивный алгоритм управления энергетическими режимами включает несколько основных этапов. На первом этапе на основе имитационного моделирования движения автотранспортного средства получают ядро алгоритма, т.е. базовые характеристики управления для типового режима функционирования автотранспортного средства. Они составляют основную (базовую) программу управления энергетическими режимами и представляют собой характеристики, оптимальные по тем или иным критериям, например по критериям динамичности или экономичности. Для построения алгоритма функционирования системы, оценки показателей качества и эффективности автотранспортного средства целесообразно использовать экспериментальные факторные модели, полученные в результате планируемого вычислительного эксперимента с помощью исходной математической модели. С помощью факторных регрессионных моделей с использованием корреляционного анализа и применения процедур оптимизации получают характеристики управления, т.е. ядро базовой программы. На втором этапе базовую программу управления трансформируют, наполнив ее адаптивными свойствами и наделив способностью принимать логически обоснованные решения по управлению, контролю и диагностированию. При этом в процессе эксплуатации автотранспортного средства учитывается большой объем информации параметры режимов движения и управляющих воздействий водителя, определяющих стиль вождения, параметры внешней среды, характеристики различных ситуаций, на которые реагирует водитель (внезапные препятствия движению, помехи, нештатные и опасные ситуации), и другие факторы. Учет различных ситуаций и обстоятельств, характеристик внешней среды, механизмов автотранспортного средства и управляющих воздействий водителя ведется соответствующими информационными переменными, которые описываются функциями принадлежности. После составления и формализации продукционных правил осуществляются процедуры дефазификации и получения окончательного алгоритма формирования вектора управляющих сигналов, служащего для корректировки базовой программы управления. Таким образом осуществляется коррекция основного алгоритма. В результате этого в операцию отработки сигналов управления исполнительными механизмами переключения передач, блокировки гидротрансформатора и режимами двигателя дополнительно вводится корректирующая величина управляющего сигнала, сформированная посредством соответствующей обработки продукционных правил и функций принадлежности, которая и учитывается в общем алгоритме управления. На последнем этапе полученный алгоритм реализуется в виде программы для системы интеллектуального управления энергетическими режимами. Алгоритм управления энергетическими режимами представляет собой совокупность предписаний, определяющих характер воздействий на основные механизмы автомобиля двигатель, трансмиссию и тормозную систему. Данный алгоритм зависит от алгоритма функционирования объекта управления и его динамических свойств. Он может быть представлен разными режимами управления оптимальным переключением передач и управлением блокировкой гидротрансформатора (ГДТ), режимом управления процессами включения фрикционов (плавностью переключений) и др. При выборе режима движения водитель по своему усмотрению может выбрать динамичную или экономичную программу. Следует отметить, что режим управления фрикционами при переключении передач 7 34212007.04.30 может входить в общий алгоритм управления. В этом случае управление процессами плавного включения фрикционов будет осуществляться автоматически в соответствии с заложенными в исполнительный блок системы характеристик. С алгоритмом управления может быть совмещен и алгоритм диагностирования механизмов транспортного средства, также использующий интеллектуальные технологии. При необходимости проводится оптимизация параметров характеристик управления с целью получения наилучших тягово-скоростных свойств и топливной экономичности. Заданные характеристики и характеристики управления механизмами и подсистемами автомобиля составляют базовую программу управления энергетическими режимами. Система адаптивного интеллектуального управления энергетическими режимами мобильной машины (фиг. 2), содержит двигатель 1 с подсистемой управления его режимами и выходным валом, гидротрансформатор 17 с турбинным колесом и муфтой блокирования, трансмиссию, включающую коробку передач 18 с входным 19 и выходным 20 валами и фрикционными муфтами 21 переключения передач, тормозную систему 3, колеса 22,взаимодействующие с опорной поверхностью 23 дороги, педаль акселератора 24 с датчиком 25 положения педали, педаль тормоза 26 с датчиком 27 положения педали, датчики 28 и 29 состояния муфты блокирования гидротрансформатора 17 и фрикционных муфт 21 коробки передач 18, датчики угловых скоростей 30, 31 и 32 вала двигателя, входного вала 19 коробки передач, связанного с турбинным колесом гидротрансформатора 17, и выходного вала 20 коробки передач, датчик скорости 33 мобильной машины, датчик 34 уклона дороги, датчик 35 состояния микропрофиля поверхности дороги, исполнительные устройства переключения передач 36 и блокирования 37 гидротрансформатора, устройство управления 38 режимами двигателя, устройство управления тормозной системой 39. В состав системы входит центральный процессор 40, который может включать блоки моделирования, оптимизации и адаптации (эти блоки условно не показаны). Процессор 40 выполнен в виде интеллектуального контроллера 41, который включает в себя блок 42 ввода и идентификации информационных сигналов, блок базы знаний 43, логический блок 44,блок вывода решений 45 и блок формирования управляющих сигналов 46, связанный с исполнительными устройствами 36-39. Вход блока 42 ввода и интерпретации информационных сигналов связан с датчиками 25, 27-35, а выход - со входом логического блока 44 и блоком базы знаний 43. Логический блок 44 непрерывно взаимодействует с блоком базы знаний 43. В блоке 43 хранятся описание различных характеристик и ситуаций, результаты формализации их функциями принадлежности и библиотека продукционных правил, а также базовые программы управления переключением передач и блокированием гидротрансформатора. Выход блока формирования управляющих сигналов 46 связан посредством соответствующих каналов (например -каналов) с электромагнитами исполнительных механизмов 36-39. Система работает следующим образом. При движении мобильной машины датчики 25, 27-35 вырабатывают соответствующие информационные сигналы, характеризующие скоростные и нагрузочные режимы машины, характеристики механизмов и подсистем,состояние муфт фрикционов коробки передач и блокирования гидротрансформатора, дорожные условия и внешнюю среду (а, т - перемещения педалей акселератора и тормоза т, д, вых - угловые скорости вращения турбинного вала гидротрансформатора, двигателя и выходного вала коробки передач ,- скорость и ускорение машины,т , - перемещения педалей акселератора и тормоза наж - время нажатия на педаль Мд, Мт, Мвых моменты двигателя, турбинного вала гидротрансформатора и выходного вала коробки передач у - угловое перемещение рулевого колеса и т.д.). Эти сигналы поступают в блок 42 ввода и идентификации сигналов, где они обрабатываются, интерпретируются и преобразуются в цифровую форму. Далее эти сигналы поступают в логический блок 44. В процессе взаимодействия с блоком базы знаний 43, а также с блоками моделирования, оптимиза 8 34212007.04.30 ции и адаптации, логический блок 44 формирует необходимые программы переключения передач и блокирования гидротрансформатора с учетом нечеткой информации, обрабатываемой методами нечеткой логики, и адаптирует эти программы к реальным условиям движения. Характеристики управления программ формируются в виде релейных характеристик переключения передач и блокирования гидротрансформатора в зависимости от сочетаний параметров скорости и нагрузки, определяемых угловой скоростью турбинного колеса гидротрансформатора и степенью нажатия на педаль акселератора. Блок вывода решений 45, используя методы и процедуры нечеткой логики, принимает предварительное решение по управлению исполнительными механизмами с учетом адаптации базовой программы к реальным условиям, а блок формирования управляющих сигналов 46 формирует окончательный управляющий сигнал (вектор управляющих сигналов) на переключение передач, блокирование гидротрансформатора 17, изменение скоростного режима двигателя 1 или управление тормозной системой 3. Последний адресуется соответствующим исполнительным устройствам 36-39. При разгоне мобильной машины нагрузка на двигатель снижается, и скорость турбинного колеса гидротрансформатора увеличивается. Значение соответствующего информационного сигнала возрастает, и при достижении порогового значения, определяемого характеристиками переключения передач, формируется релейный сигнал переключения на высшие передачи, который отрабатывается устройством 36. Управление блокированием гидротрансформатора система осуществляет аналогично. Если происходит увеличение скорости турбинного колеса гидротрансформатора, например, при разгоне машины (когда возникает необходимость блокирования ГДТ), то при соответствующем уровне информационного сигнала в соответствии с характеристиками блокирования формируется релейный сигнал на блокирование ГДТ, который отрабатывается исполнительным устройством 37. В случае снижения скорости машины происходит автоматическое переключение на низшие передачи, сопровождающееся разблокированием гидротрансформатора на некоторое время (приблизительно 2,53,5 сек). Для улучшения качества переходных процессов целесообразно осуществлять изменение скоростного режима двигателя при переключениях передач. С этой целью программой предусмотрено управление режимами двигателя 1 посредством устройства 38. В системах управления переключением передач без разрыва потока мощности положение органа управления подачей топлива в двигатель в процессе переключений остается неизменным, и необходимость в устройствах 38 отпадает. Качество переходных процессов при переключениях передач в этом случае обеспечивается путем управления временными интервалами срабатывания исполнительных механизмов включаемой и выключаемой фрикционных муфт 21. При этом включение высших передач осуществляется с временным перекрытием, а низших - с разрывом потока мощности. Плавность движения мобильной машины существенно зависит от организации процесса включения фрикционных муфт 21 коробки передач при переключениях передач. Этот процесс определяется характеристикой нарастания давления в исполнительном цилиндре фрикционной муфты 21, которая формируется на основе соответствующего алгоритма и реализуется логическими и исполнительными элементами интеллектуальной системы управления. Применяются два способа регулирования давления - посредством клапанов плавного включения или с использованием механизмов пропорционального управления. Более эффективны последние. В механизмах пропорционального управления исполнительные элементы представляют собой электромагнитные клапаны с пропорциональными электромагнитами. Управление этими клапанами осуществляется посредством широтно-импульсной модуляции управляющего сигнала. Усилие пропорционального электромагнита зависит от скважности сигнала управления, формирование которого осуществляется посредством центрального процессора 40 по специальным алгоритмам. 34212007.04.30 Для получения интенсивного торможения (в случае появления опасной ситуации) водитель резко нажимает на педаль тормоза. В этом случае в соответствии с заложенными правилами и алгоритмами система сформирует управляющий сигнал для отработки исполнительному устройству 39 управления тормозной системой 3. При необходимости торможения двигателем (например, при движении машины с грузом на спуске) формируется управляющий сигнал для принудительного включения низшей передачи, который будет отрабатываться устройством 36. В результате рационально используются тормозные свойства двигателя 1. При необходимости могут быть обеспечены антиблокировочные свойства (при наличии соответствующих механизмов и систем). Одновременный анализ множества информационных переменных и применение методов нечеткой логики при управлении и диагностировании позволяет учесть различные факторы и ситуации особенности управления мобильной машиной, обусловленные навыками вождения и квалификацией водителя, его степенью усталости уровень загрузки машины изменение характеристик внешней среды и дорожных условий внезапные препятствия и помехи движению нештатные и опасные ситуации. Согласно проведенным теоретическим и экспериментальным исследованиям, в том числе в заводских условиях и в процессе реальной эксплуатации конкретных мобильных машин, интеллектуальное управление энергетическими режимами мобильной машины значительно улучшает ее показатели эффективности и повышает безопасность движения. В частности, путевой расход топлива быстроходной гусеничной мобильной машины специального назначения снижается на 9-11 , средняя скорость движения увеличивается на 8-10 , производительность возрастает на 15-18 , заметно повышается безопасность движения, улучшаются условия труда водителя, обеспечивается непрерывный контроль и анализ диагностических параметров, соблюдаются абсолютно все рекомендации и предписания инструкции по эксплуатации используемых мобильных машин. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: B65K 41/00
Метки: мобильной, интеллектуального, система, энергетическими, режимами, машины, адаптивного, управления
Код ссылки
<a href="https://by.patents.su/10-u3421-sistema-adaptivnogo-intellektualnogo-upravleniya-energeticheskimi-rezhimami-mobilnojj-mashiny.html" rel="bookmark" title="База патентов Беларуси">Система адаптивного интеллектуального управления энергетическими режимами мобильной машины</a>
Способ интеллектуального управления энергетическими режимами автотранспортного средства и система для его реализации

Номер патента: 8007
Опубликовано: 30.04.2006
Автор: Рынкевич Сергей Анатольевич
МПК: B60K 41/06, F16H 61/02
Метки: интеллектуального, режимами, способ, реализации, управления, энергетическими, средства, автотранспортного, система
Текст:
...интеллектуального контроллера на основе нечеткой логики или с использованием других технологий искусственного интеллекта. Контроллер имеет блок ввода и интерпретации информационных сигналов, блок базы данных и правил, логический блок, блок вывода решений и блок формирования управляющих сигналов, при этом входы блока ввода и интерпретации информационных сигналов связаны с датчиками положения педалей акселератора и тормоза, угловых скоростей...
Способ адаптивного управления энергетическими режимами автотранспортного средства
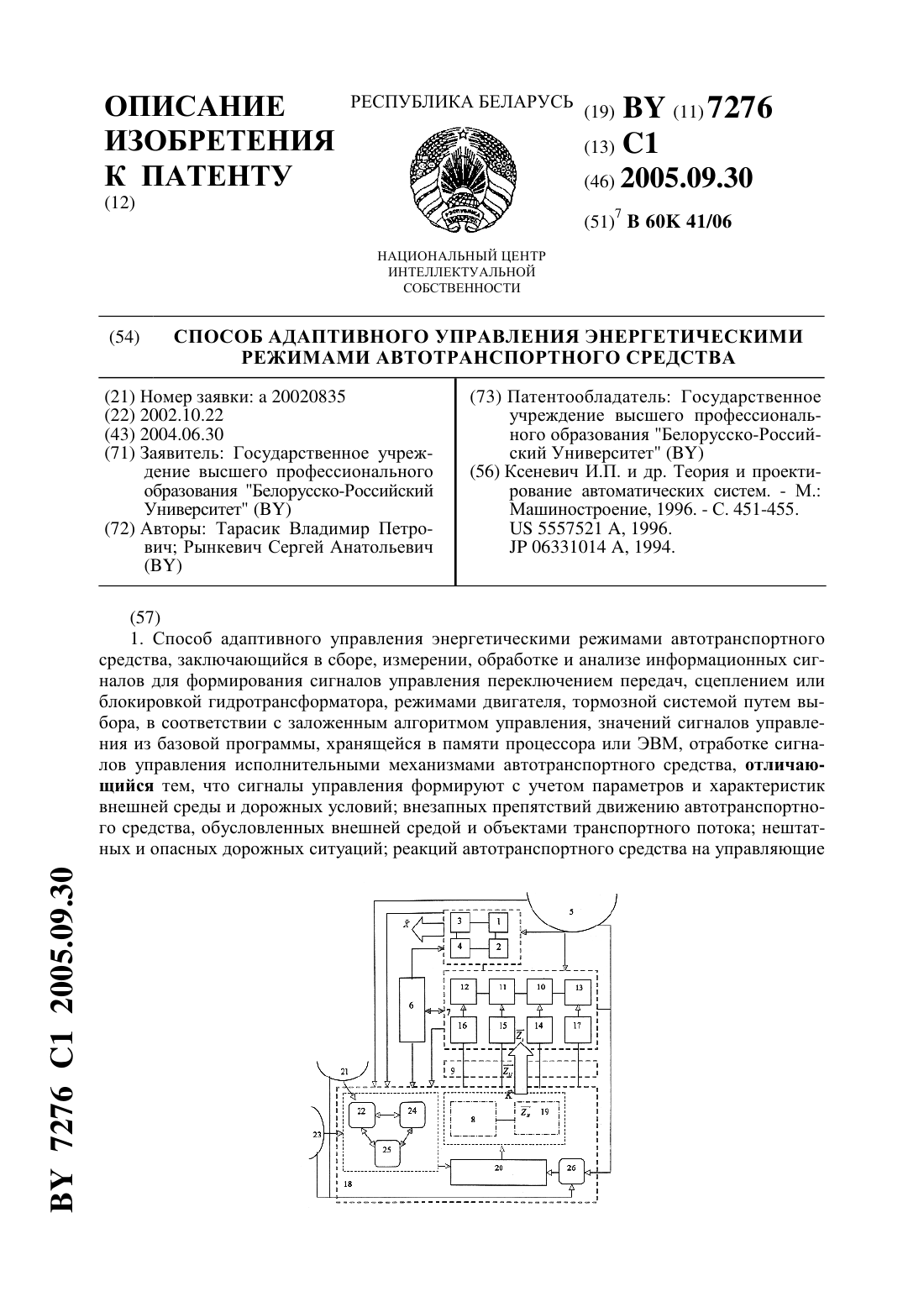
Номер патента: 7276
Опубликовано: 30.09.2005
Авторы: Тарасик Владимир Петрович, Рынкевич Сергей Анатольевич
МПК: B60K 41/06
Метки: энергетическими, управления, автотранспортного, режимами, способ, средства, адаптивного
Текст:
...движению автотранспортного средства, обусловленных внешней средой и объектами транспортного потока нештатных и опасных дорожных ситуаций реакций автотранспортного средства на управляющие воздействия параметров скоростных режимов движения автотранспортного средства особенностей управления автотранспортным средством, обусловленных стилем, навыками вождения и квалификацией водителя уровня загрузки автотранспортного средства допустимых...
Способ адаптивного управления энергетическими режимами автотранспортного средства
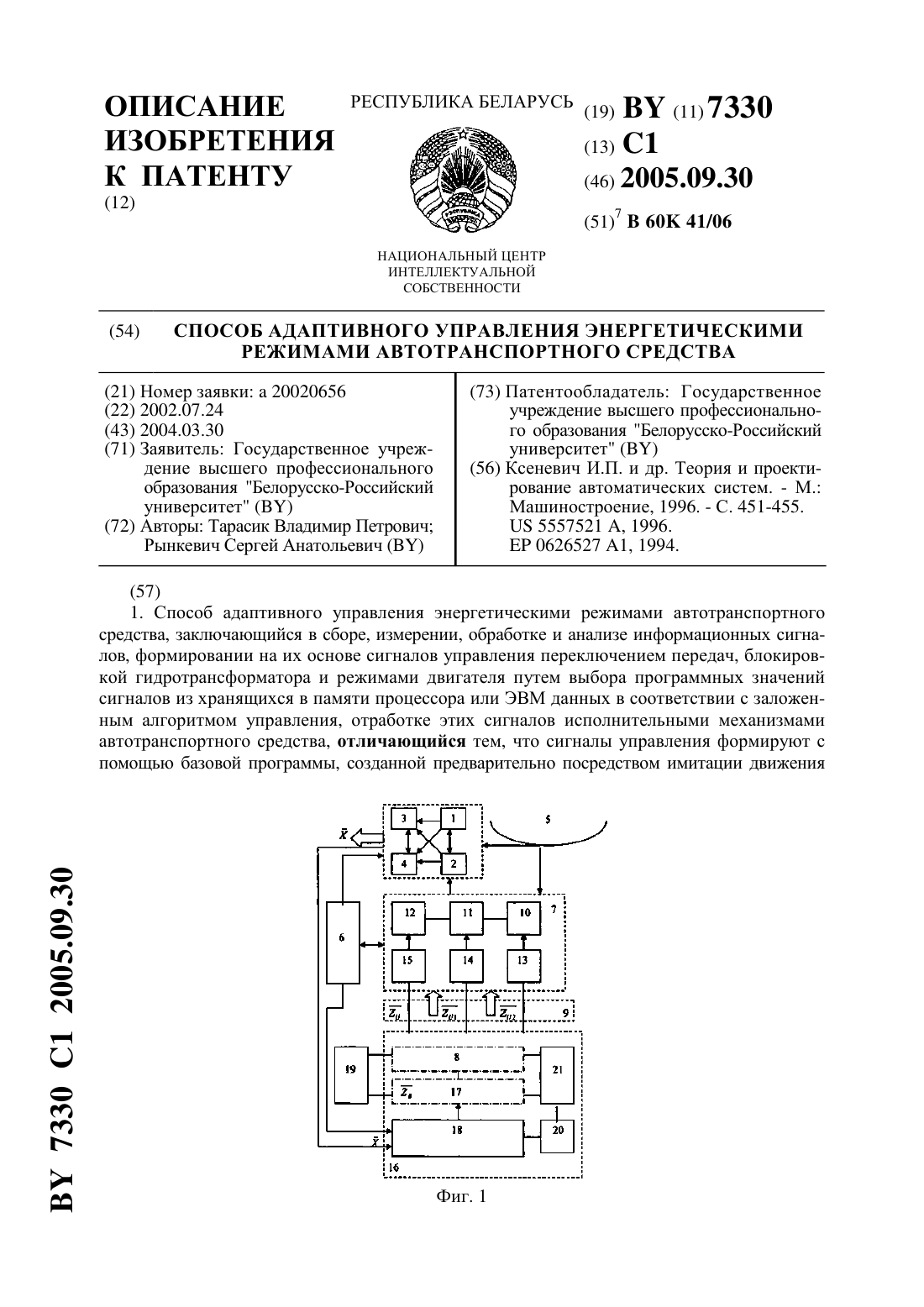
Номер патента: 7330
Опубликовано: 30.09.2005
Авторы: Рынкевич Сергей Анатольевич, Тарасик Владимир Петрович
МПК: B60K 41/06
Метки: управления, способ, режимами, энергетическими, автотранспортного, средства, адаптивного
Текст:
...зависимостей параметров характеристик базовой программы управле 4 7330 1 2005.09.30 ния от параметров автомобиля, внешней среды и управляющих воздействий водителя корреляционный анализ зависимостей параметров характеристик базовой программы от параметров автомобиля, внешней среды и управляющих воздействий водителя и выбор дополнительных информационных переменных, необходимых для адаптации базовой программы регрессионный анализ результатов...
Автоматическая трансмиссия мобильной машины
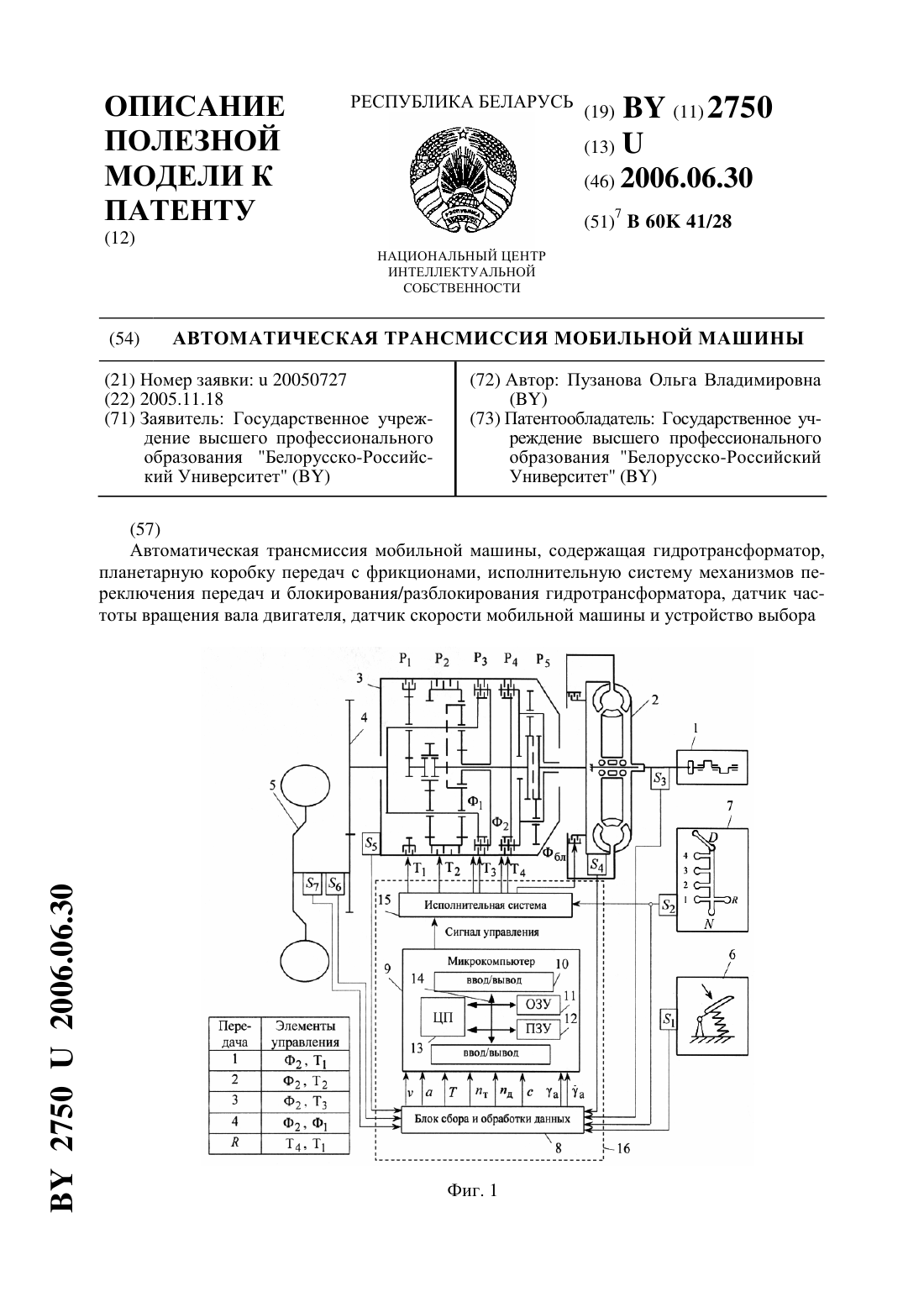
Номер патента: U 2750
Опубликовано: 30.06.2006
Автор: Пузанова Ольга Владимировна
МПК: B60K 41/28
Метки: машины, трансмиссия, автоматическая, мобильной
Текст:
...вращения турбинного колеса гидротрансформаторадатчик 5 - температуры масла гидромеханической трансмиссии Т датчик 6 - скоростимобильной машины датчик 7 - ускорения а мобильной машины. Все датчики соединены с блоком сбора и обработки данных 8, а датчик 2 соединен дополнительной связью с исполнительной системой 15. Микрокомпьютер 9, расположенный между блоком сбора и обработки данных 8 и исполнительной системой 15, включает устройство...
Гидропневматическая система подрессоривания моста мобильной машины
Номер патента: U 3319
Опубликовано: 28.02.2007
Авторы: Мажей Андрей Андреевич, Ракицкий Антон Антонович, Ермаленок Валерий Генрихович, Высоцкий Михаил Степанович
МПК: B60G 17/04
Метки: моста, система, подрессоривания, гидропневматическая, мобильной, машины
Текст:
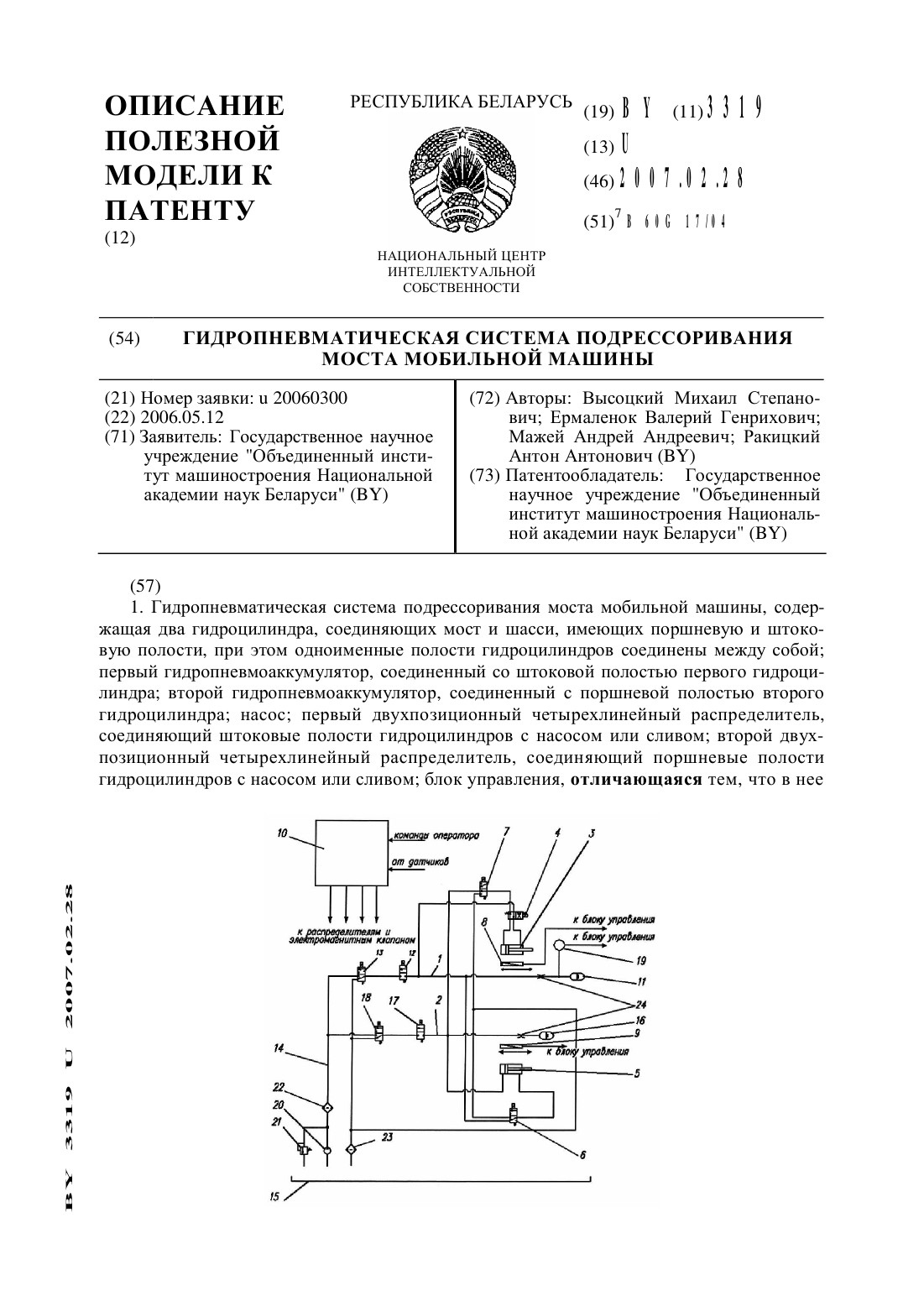
...двустороннего действия с общими поршневыми и штоковыми полостями к гидроцилиндрам одностороннего действия с независимым регулированием давления в поршневых полостях и обратно.Для решения поставленной задачи предлагается дополнить гидропневматическую подвеску тремя распределителями с электромагнитным управлением. Третий двухпозиционный четырехлинейный распределитель подключен к первому гидроцилиндру, соединяющему мост и шасси, и по команде...
Предыдущий патент: Изделие, включающее голографическое изображение, и бумага для его получения
Следующий патент: Устройство для определения сдвига ветра
Случайный патент: Способ регенерации триацетатной основы кинофотоленты