Федосов Николай Михайлович
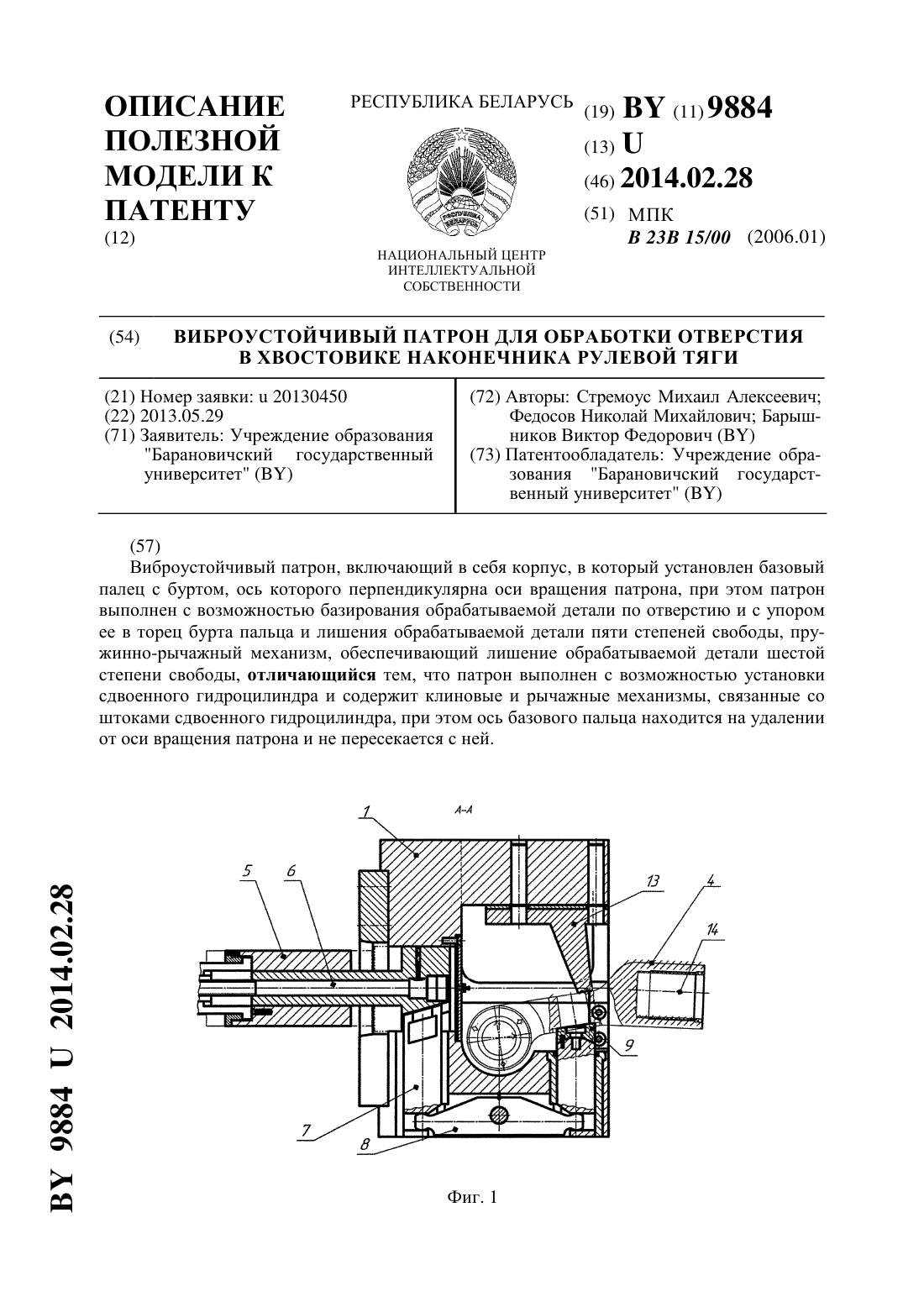
Виброустойчивый патрон для обработки отверстия в хвостовике наконечника рулевой тяги
Номер патента: U 9884
Опубликовано: 28.02.2014
Авторы: Федосов Николай Михайлович, Барышников Виктор Федорович, Стремоус Михаил Алексеевич
МПК: B23B 15/00
Метки: тяги, наконечника, патрон, хвостовике, виброустойчивый, обработки, рулевой, отверстия
Текст:
...при обработке деталей сложной конструкции. Данная техническая задача решается тем, что виброустойчивый патрон включает в себя корпус, в который установлен базовый палец с буртом, ось которого перпендикулярна оси вращения патрона, при этом патрон выполнен с возможностью базирования обрабатываемой детали по отверстию и с упором ее в торец бурта пальца и лишения обрабатываемой детали пяти степеней свободы, пружинно-рычажный механизм,...
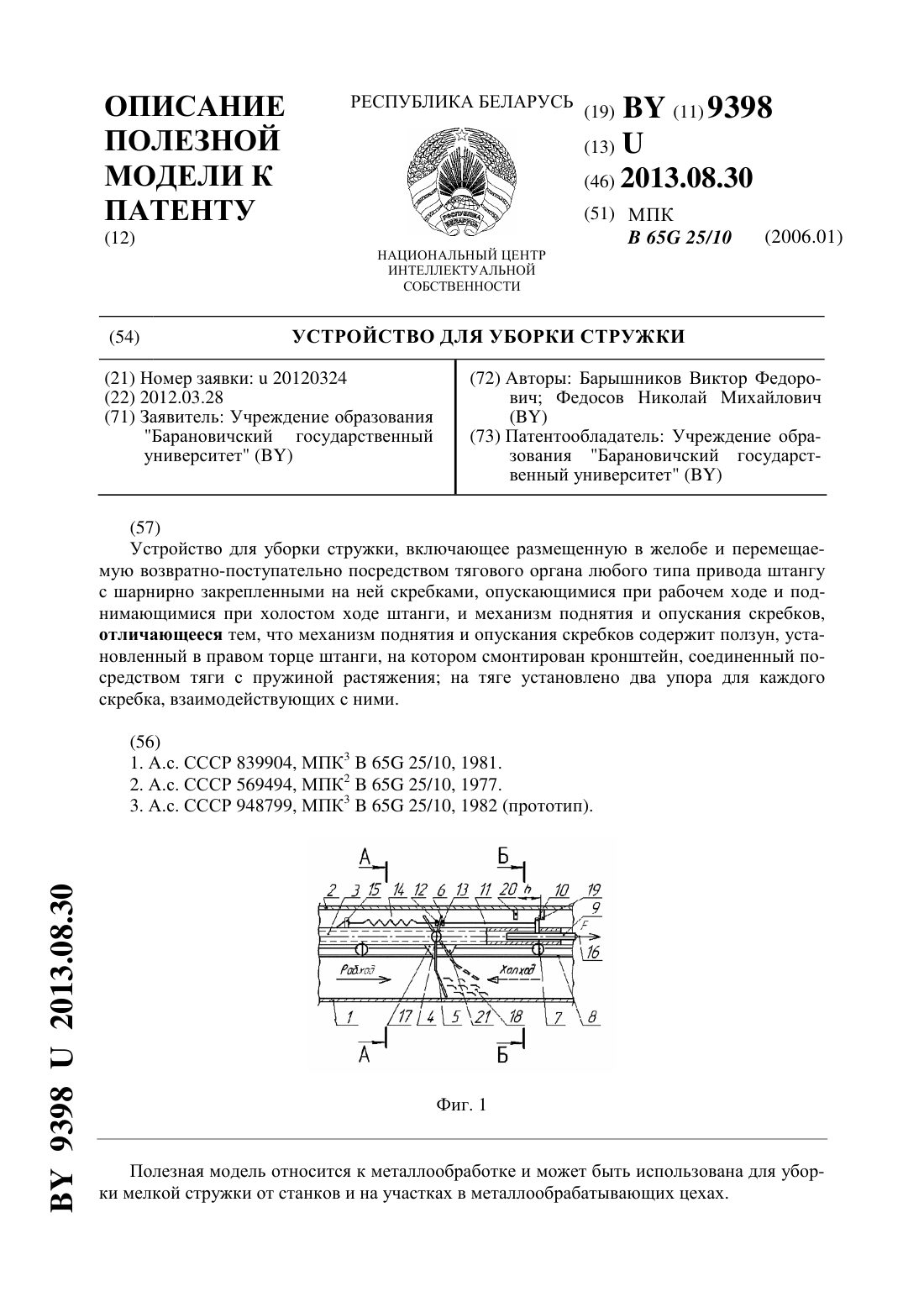
Устройство для уборки стружки
Номер патента: U 9398
Опубликовано: 30.08.2013
Авторы: Барышников Виктор Федорович, Федосов Николай Михайлович
МПК: B65G 25/10
Метки: устройство, уборки, стружки
Текст:
...является штанговый скребковый конвейер, содержащий пневмопривод возвратно-поступательного движения, желоб, скребки, закрепленные с возможностью поворота, штангу с упорами,взаимодействующими со скребками, элемент управления и рычаги, каждый рычаг шарнирно соединен со скребком и установлен с возможностью перемещения относительно штанги, при этом желоб имеет в сечении форму полукруга 3. Недостатком данного штангового скребкового...
Устройство для определения геометрической формы фанерных сортиментов

Номер патента: U 8156
Опубликовано: 30.04.2012
Авторы: Алифанов Александр Викторович, Калугин Юрий Константинович, Федосов Николай Михайлович
МПК: B27L 5/02
Метки: устройство, формы, фанерных, геометрической, определения, сортиментов
Текст:
...является то, что датчики выполнены с возможностью возвратно-поступательного перемещения по боковым стойкам подвижной измерительной рамы, расположенным под углом к продольной оси фанерного сортимента, причем этот угол зависит от скоростей движения подвижной измерительной рамы и датчиков, перемещающихся вдоль ее боковых стоек, по следующей зависимости р ,д где р - скорость движения подвижной измерительной рамы д - скорость движения датчика....