Лестничный подъемник для инвалидов
Номер патента: U 9348
Опубликовано: 30.08.2013
Авторы: Игнатенко Николай Иванович, Логвинец Александр Васильевич, Цыкунов Евгений Михайлович

Текст
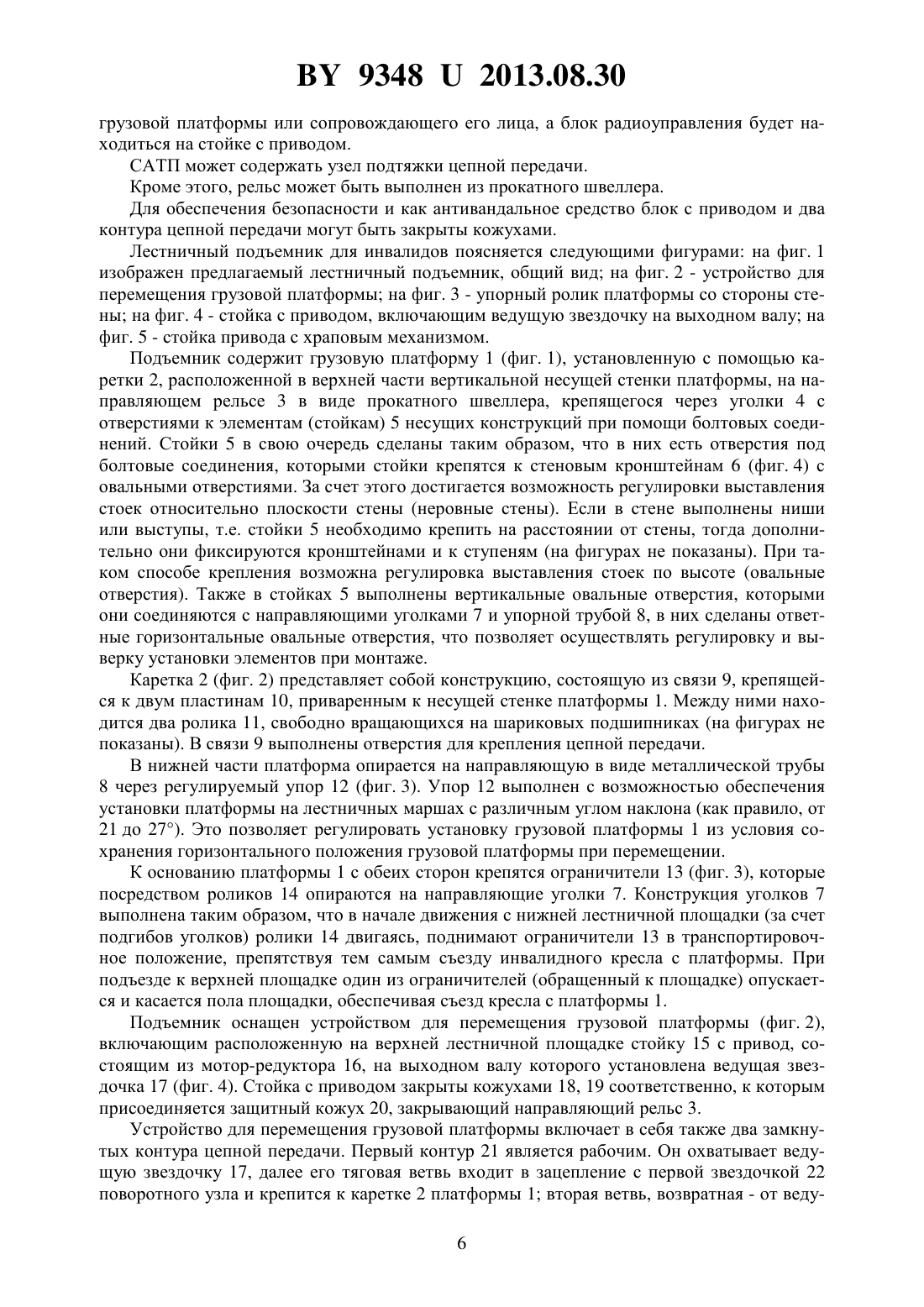
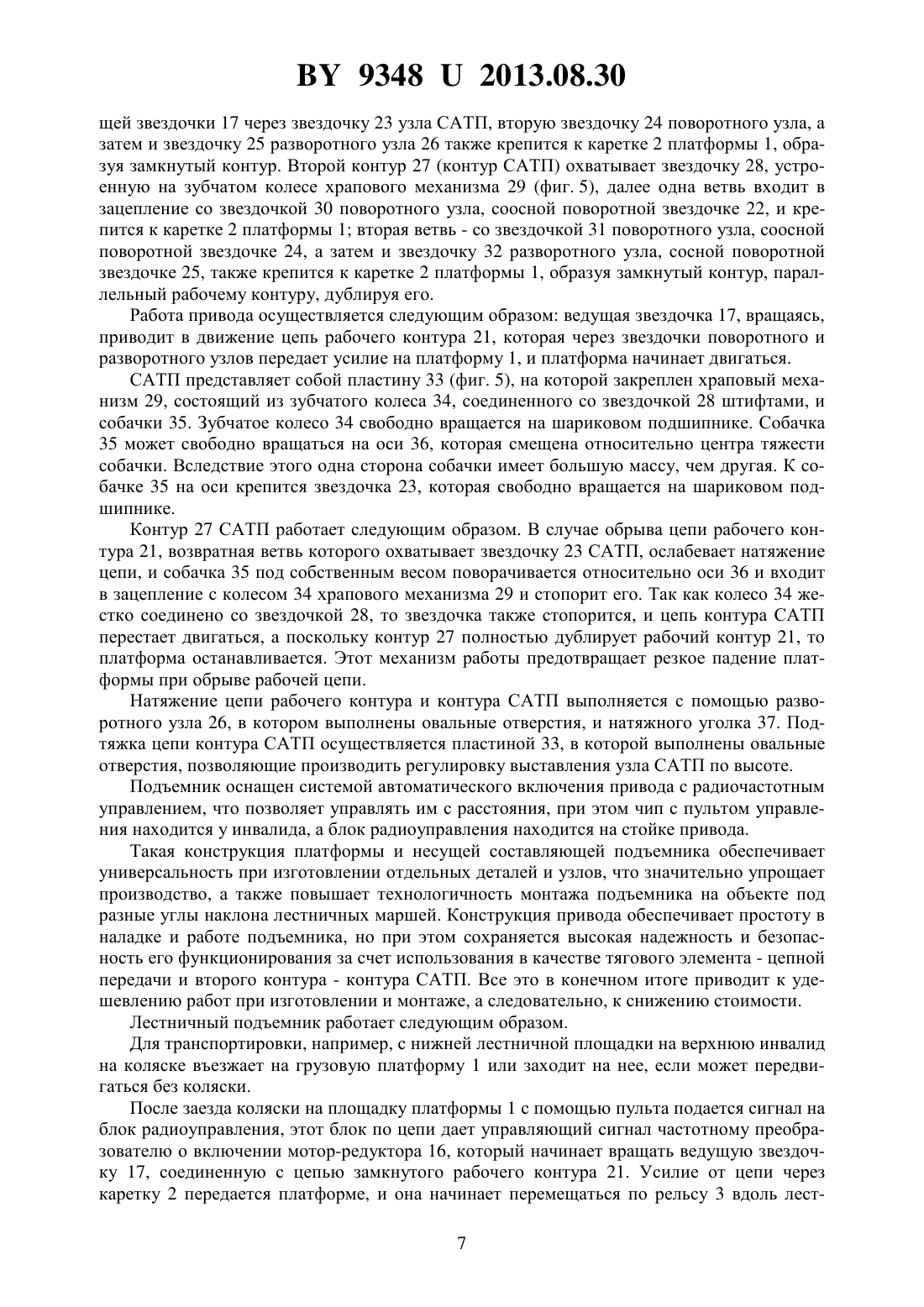
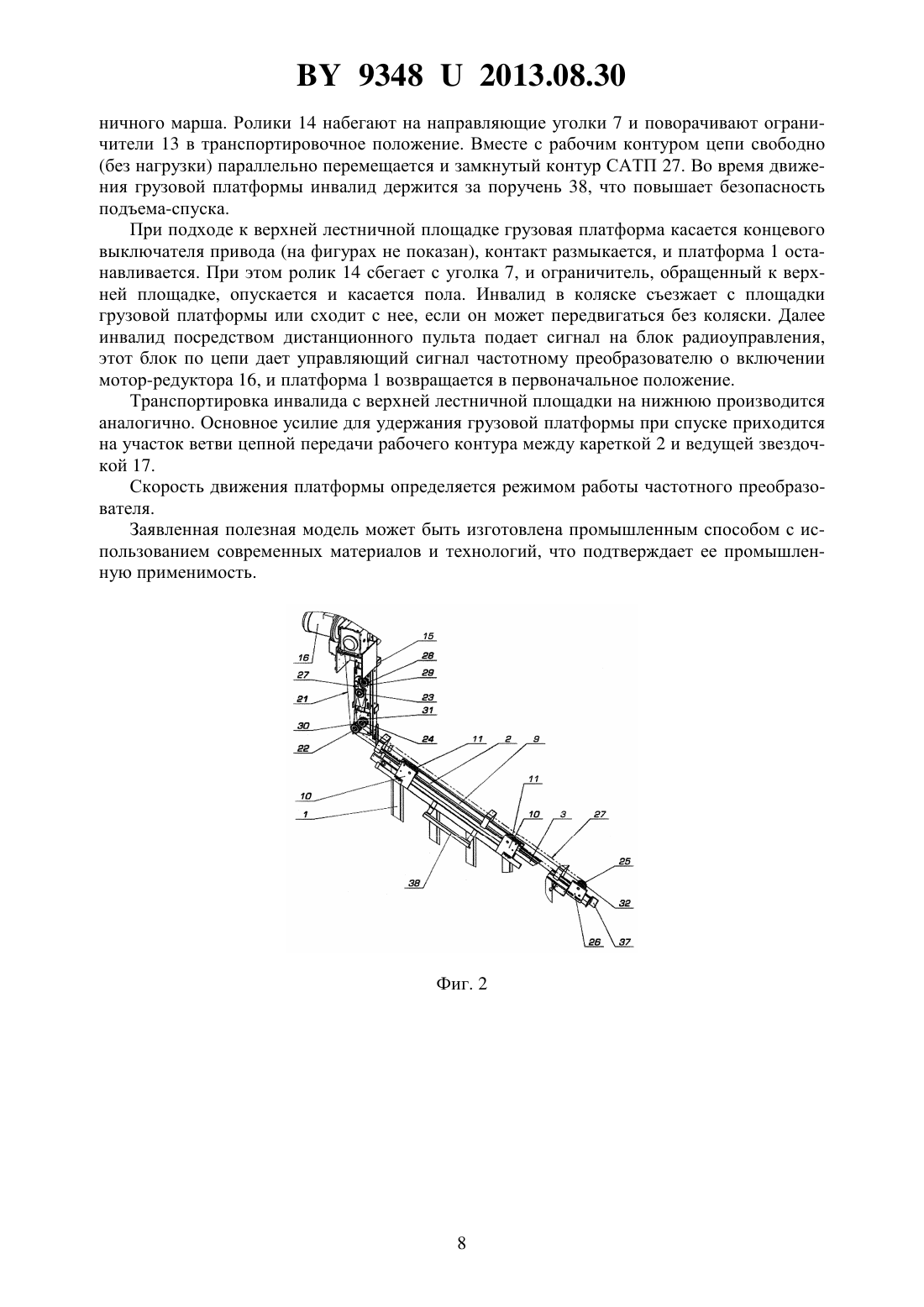
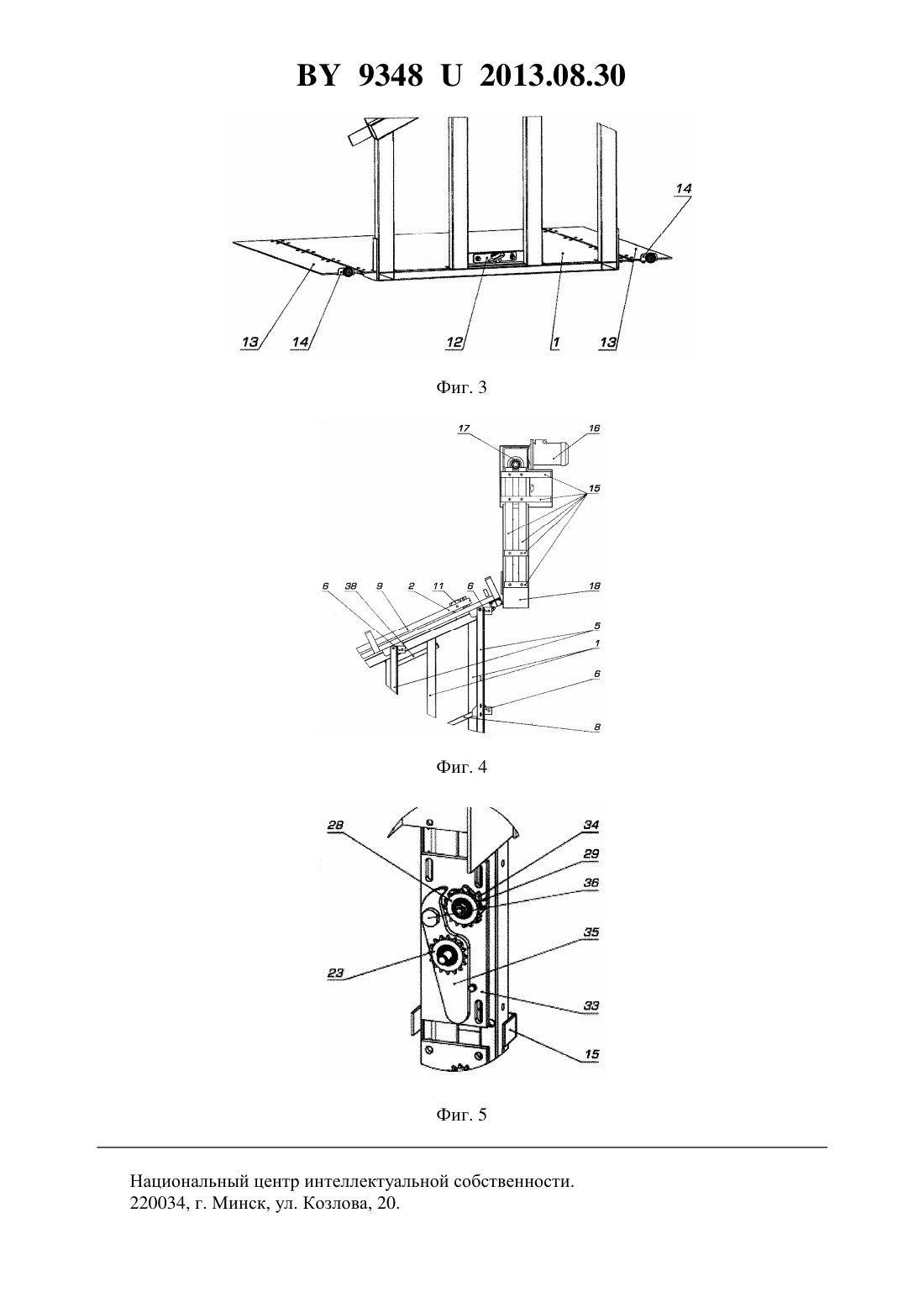
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЛЕСТНИЧНЫЙ ПОДЪЕМНИК ДЛЯ ИНВАЛИДОВ(71) Заявитель Совместное общество с ограниченной ответственностью ЛюксЛифт(72) Авторы Игнатенко Николай Иванович Логвинец Александр Васильевич Цыкунов Евгений Михайлович(73) Патентообладатель Совместное общество с ограниченной ответственностью ЛюксЛифт(57) 1. Лестничный подъемник, включающий грузовую платформу с вертикальной несущей стенкой, установленную по меньшей мере на одной направляющей, выполненной в виде рельса и закрепленной вдоль лестничного марша посредством несущих конструкций,с помощью устроенной на вертикальной несущей стенке каретки устройство для перемещения грузовой платформы, включающее расположенную на верхней лестничной площадке стойку с приводом, снабженным ведущей звездочкой на выходном валу и охватывающей ведущую звездочку замкнутой рабочей кинематической передачей, при этом концы тяговой и возвратной ветвей рабочей передачи соединены с кареткой систему автоматического торможения грузовой платформы при обрыве рабочей передачи систему автоматического включения привода, отличающийся тем, что рабочая кинематическая передача выполнена в виде цепной передачи система автоматического торможения грузовой платформы включает расположенный на стойке с приводом храповый механизм с устроенной на собачке звездочкой, входящей в зацепление с возвратной ветвью рабочей передачи, и замкнутый контур цепной передачи, устроенный параллельно рабочему контуру, охватывающий звездочку, устроенную на оси вращения зубчатого колеса храпового 93482013.08.30 механизма, а концы контура соединены с кареткой при этом каждый контур цепной передачи выполнен с обеспечением натяжения цепи и включает ведомые звездочки, обеспечивающие поворот и разворот контура передачи, устроенные на стойке с приводом и на нижней части рельса соответственно. 2. Подъемник по п. 1, отличающийся тем, что тяговая ветвь контура рабочей передачи после ведущей звездочки входит в зацепление с первой поворотной звездочкой, устроенной на стойке с приводом, с последующим креплением к каретке, а возвратная ветвь после ведущей звездочки входит в зацепление со звездочкой, расположенной на собачке храпового механизма, затем входит в зацепление со второй поворотной звездочкой, устроенной на стойке с приводом, далее охватывает разворотную звездочку, устроенную на нижней части рельса, с последующим соединением с кареткой. 3. Подъемник по п. 2, отличающийся тем, что одна ветвь контура цепной передачи системы автоматического торможения грузовой платформы после звездочки храпового механизма входит в зацепление с поворотной звездочкой, соосной первой поворотной звездочке рабочей передачи, с последующим креплением к каретке, а вторая ветвь входит в зацепление с поворотной звездочкой, соосной второй поворотной звездочке рабочей передачи, затем охватывает разворотную звездочку, устроенную соосно разворотной звездочке рабочей передачи, с последующим соединением с кареткой. 4. Подъемник по п. 1, отличающийся тем, что к платформе с обеих сторон с возможностью отворота присоединены ограничители, обеспечивающие предотвращение съезда инвалидного кресла с платформы в процессе ее перемещения. 5. Подъемник по п. 4, отличающийся тем, что платформа с нижней стороны содержит ролики, опирающиеся на две направляющие в виде уголков, расположенные ниже рельса, и обеспечивающие подъем ограничителей в транспортное положение и опускание ограничителя с отключением привода при подъезде к верхней площадке лестничного марша. 6. Подъемник по п. 1, отличающийся тем, что грузовая платформа в нижней части содержит регулируемый упор, обеспечивающий ее установку на направляющую в виде металлической трубы, расположенную ниже рельса, под необходимым углом из условия сохранения горизонтального положения грузовой платформы при перемещении. 7. Подъемник по п. 1, отличающийся тем, что элементы несущих конструкций выполнены с возможностью регулирования их установки из условия сохранения вертикального положения грузовой платформы при перемещении. 8. Подъемник по п. 1, отличающийся тем, что система автоматического включения привода является дистанционной, пульт радиочастотного управления которой расположен у пассажира грузовой платформы или сопровождающего его лица, а блок радиоуправления находится на стойке с приводом. 9. Подъемник по п. 1, отличающийся тем, что система автоматического торможения грузовой платформы включает узел подтяжки цепной передачи. 10. Подъемник по п. 1, отличающийся тем, что рельс выполнен из прокатного швеллера. 11. Подъемник по п. 1, отличающийся тем, что блок с приводом и два контура цепной передачи закрыты кожухами. 93482013.08.30 Полезная модель относится к подъемно-транспортному машиностроению, в частности к пассажирским наклонным подъемникам, и может быть использована в больницах, жилых зданиях, административных и спортивных сооружениях, магазинах, подземных переходах, культурно-массовых и развлекательных комплексах, прочих объектах для транспортирования по лестничным маршам инвалидных колясок и лиц с ограниченной подвижностью и возможностями. Известен подъемник для инвалидов с рельсовой дорогой для применения на лестничном марше 1, выполненный в виде кресла, которое перемещается по рельсам рельсы продлены и выполнены так, чтобы могла быть обеспечена более эффективная посадка. Подъемник снабжен барабанной лебедкой и средствами, предотвращающими опрокидывание кресла. Креслоустанавливается на рельсыи перемещается вверх ручной лебедкой , рельсы проложены так, чтобы позволить креслу перемещаться вплоть до места посадки. Лебедка имеет два канала, один соединен с креслом через приспособление на крюке безопасности , который входит в зацепление с зубчатой рейкойв случае обрыва подъемного каната для удержания кресла, в то время как другой соединен со скользящим противовесом. К тому же к обычным роликам , к креслу крепятся спереди и сзади направляющие ролики , зависимые выступы 1, с которыми взаимодействуют канавки зубчатой рейки на рельсах. Лебедка выполнена с храповым колесом и собачкой для предотвращения движения назад. Недостатком данного технического решения является то, что используется ручной привод, который влечет за собой необходимость присутствия вместе с инвалидом сопровождающего лица, а также увеличение габаритных размеров подъемника - наличие лебедки барабанного типа, штурвала (рукоятки) привода, противовеса. Известна также портативная подъемная система 2, предназначенная для перемещения вдоль коротких и средней длины лестничных маршей, состоящая из пары разнесенных прямоугольных металлических пластин, расположенных вдоль лестничного марша и поддерживаемых парой вертикально установленных концевых кронштейнов, прикрепленных к деревянному брусу на каждом конце. Через каждую пару кронштейнов проходит ось, и на каждой оси перпендикулярно расположен ролик на концевых металлических пластинах. По крайней мере один из этих роликов снабжен звездочкой, расположенной на оси между разделенными сегментами ролика. Реверсивный мотор-редуктор приводит в действие цепную передачу, соединенную со звездочкой, которая управляет роликом. Тяжелый ленточный транспортер устанавливается на паре роликов. Опора пассажира (либо сиденье или подножка-ступенька) соединена и двигается вместе с ленточным транспортером. Ручной выключатель служит средством для контроля работы двигателя, пассажир в любой точке пути может осуществить управление его работой. Автоматические выключатели останавливают подъемник на обеих концах наклонной лестницы. В модифицированном варианте для длинных лестничных маршей принимается двойная цепная передача. Недостатком данного технического решения является отсутствие каких-либо средств безопасности, которые контролировали бы работу мотор-редуктора и целостность приводной цепи и ленточного транспортера, на котором установлена опорная площадка инвалида, а также отсутствие защитных кожухов или экранов на вращающихся элементах. Известен также лестничный подъемник с перепрограммируемыми режимами управления 3, который может эксплуатироваться в различных режимах, соответствующих различным условиям работы (в общественных местах, где много пользователей, где один пользователь), благодаря электронному программированию. Для переключения между режимами электронный блок управления может быть расположен на платформе подъемника 10 и может быть перепрограммирован через устройство, расположенное в подлокотнике подъемника 14, который может включать в себя дисплей. При режиме работы в общественных местах, где много пользователей, инвалиду удобнее самому управлять подъемником, чем использовать дистанционную станцию управления движением 20. 3 93482013.08.30 Подъемник может включать кнопочный переключатель 15, управление направлением движения 13, датчик нагрузки на сиденье 16 и датчик уровня поднятия сиденья (кресла) 17. Каждая дистанционная станция управления 20 может включать в себя вызывной переключатель 22 и кнопочный переключатель 23. Кнопочный переключатель 15 может работать как би-стабильный переключатель, имеющий два набора контактов 1 нормально разомкнутый и 1 нормально замкнутый с устройством для установки различных положений переключателя. Недостатком данного подъемника является то, что для перемещения инвалида необходимо, чтобы он пересаживался с коляски на кресло подъемника. Дистанционная станция представляет собой кнопочный пульт (пост), расположенный на стенах помещения по ходу движения подъемника. Программирование режимов работы осуществляется пользователями, а не квалифицированным персоналом, что может привести к сбоям в работе и к поломке оборудования. Наиболее близким по технической сущности к заявляемой полезной модели является лестничный подъемник для инвалидов 4, содержащий грузовую платформу с вертикальной несущей стенкой и откидной площадкой, установленную с помощью верхней и нижней подвесок на направляющих в виде двух закрепленных на стене лестничного марша и разнесенных по высоте трубчатых рельсов, в верхнем из которых выполнена продольная прорезь и устройство для перемещения грузовой платформы, включающее расположенный на верхней лестничной площадке привод с ведущей звездочкой на выходном валу, и охватывающую ее замкнутую тросовую передачу, тяговая ветвь которой проложена в верхнем рельсе и оснащена равномерно закрепленными по ее длине шаровыми тяговыми элементами, а возвратная ветвь проложена в нижнем рельсе и оснащена равномерно распределенными вдоль нее центрирующими элементами, при этом грузовая платформа соединена с тяговой ветвью поводком, скользящим в продольной прорези верхнего рельса, а ее верхняя подвеска снабжена роликами, опирающимися на верхний рельс. При этом грузовая платформа снабжена дополнительным поводком, верхняя и нижняя подвески грузовой платформы выполнены в виде кареток, установленных на несущей стенке с возможностью поворота относительно оси, перпендикулярной несущей стенке, верхняя каретка оснащена полкой, расположенной под верхним рельсом, на которой закреплены оба поводка, нижняя каретка снабжена четырьмя горизонтальными роликами с односторонними ребордами, охватывающими попарно сверху и снизу нижний рельс, и размещенным между ними вертикальным роликом, контактирующим с боковой поверхностью нижнего рельса, нижняя ветвь тросовой передачи оснащена трубчатыми цилиндрическими проставками, жестко закрепленными на тросе между центрирующими элементами. Центрирующие элементы выполнены бочкообразными и свободно установлены на тросе,тяговая и возвратная ветви тросовой передачи соединены между собой на выходе из ведущей звездочки, а их вторые концы закреплены в поводках верхней каретки. Кроме этого, подъемник содержит систему автоматического торможения грузовой платформы при обрыве рабочей передачи (САТП) и систему автоматического включения привода. Однако данное устройство обладает тем недостатком, что наличие бочкообразных центрирующих элементов, во-первых, усложняет конструкцию тяговой тросовой передачи, а во-вторых, увеличивает трение между тяговым элементом и направляющим рельсом,а следовательно, увеличивается потеря мощности привода. Сложность конструкции вызывает увеличение издержек при изготовлении и монтаже и ведет к резкому увеличению конечной стоимости подъемника. Кроме этого, в конструкции устройства отсутствуют средства безопасности, контроля работы мотор-редуктора, изменения скорости движения. Задачами, на решение которых направлена заявляемая полезная модель, являются создание лестничного подъемника для инвалидов, который можно эксплуатировать в любых зданиях и сооружениях 93482013.08.30 создание простых и функциональных привода и конструкции подъемника, но при этом должна быть обеспечена надежность и безопасность повышение технологичности и универсальности изготовления и монтажа подъемника и, соответственно, снижение его стоимости. Поставленная задача решается за счет того, что в лестничном подъемнике, включающем грузовую платформу с вертикальной несущей стенкой, установленную по меньшей мере на одной направляющей, выполненной в виде рельса и закрепленной вдоль лестничного марша посредством несущих конструкций, с помощью устроенной на вертикальной несущей стенке каретки устройство для перемещения грузовой платформы, включающее расположенную на верхней лестничной площадке стойку с приводом, снабженным ведущей звездочкой на выходном валу и охватывающей ведущую звездочку замкнутой рабочей кинематической передачей, при этом концы тяговой и возвратной ветви рабочей передачи соединены с кареткой систему автоматического торможения грузовой платформы при обрыве рабочей передачи систему автоматического включения привода, согласно полезной модели, рабочая кинематическая передача выполнена в виде цепной передачи система автоматического торможения грузовой платформы включает расположенный на стойке с приводом храповый механизм с устроенной на собачке звездочкой, входящей в зацепление с возвратной ветвью рабочей передачи, и замкнутый контур цепной передачи,устроенный параллельно рабочему контуру, охватывающий звездочку, устроенную на оси вращения зубчатого колеса храпового механизма, а концы контура соединены с кареткой при этом каждый контур цепной передачи выполнен с обеспечением натяжения цепи и включает ведомые звездочки, обеспечивающие поворот и разворот контура передачи, устроенные на стойке с приводом и на нижней части рельса соответственно. В частном случае выполнения тяговая ветвь контура рабочей передачи после ведущей звездочки входит в зацепление с первой поворотной звездочкой, устроенной на стойке с приводом, с последующим креплением к каретке, а возвратная ветвь после ведущей звездочки входит в зацепление со звездочкой, расположенной на собачке храпового механизма, затем входит в зацепление со второй поворотной звездочкой, устроенной на стойке с приводом, далее охватывает разворотную звездочку, устроенную на нижней части рельса,с последующим соединением с кареткой, а одна ветвь контура цепной передачи САТП после звездочки храпового механизма входит в зацепление с поворотной звездочкой, соосной первой поворотной звездочке рабочей передачи, с последующим креплением к каретке а вторая ветвь входит в зацепление с поворотной звездочкой, соосной второй поворотной звездочке рабочей передачи, затем охватывает разворотную звездочку, устроенную соосно разворотной звездочке рабочей передачи, с последующим соединением с кареткой. Кроме этого, к платформе с обеих сторон с возможностью отворота могут быть присоединены ограничители, обеспечивающие предотвращение съезда инвалидного кресла с платформы в процессе ее перемещения. При этом платформа с нижней стороны содержит ролики, опирающиеся на две направляющие в виде уголков, расположенные ниже рельса и обеспечивающие подъем ограничителей в транспортное положение и опускание ограничителя с отключением привода при подъезде к верхней площадке лестничного марша. Грузовая платформа в нижней части может содержать также регулируемый упор,обеспечивающий ее установку на направляющую в виде металлической трубы, расположенную ниже рельса, под необходимым углом из условия сохранения горизонтального положения грузовой платформы при перемещении. Кроме этого, элементы несущей конструкции могут быть выполнены с возможностью регулирования их установки из условия сохранения вертикального положения грузовой платформы при перемещении. Помимо этого, система автоматического включения привода может являться дистанционной, при этом пульт радиочастотного управления будет располагаться у пассажира 5 93482013.08.30 грузовой платформы или сопровождающего его лица, а блок радиоуправления будет находиться на стойке с приводом. САТП может содержать узел подтяжки цепной передачи. Кроме этого, рельс может быть выполнен из прокатного швеллера. Для обеспечения безопасности и как антивандальное средство блок с приводом и два контура цепной передачи могут быть закрыты кожухами. Лестничный подъемник для инвалидов поясняется следующими фигурами на фиг. 1 изображен предлагаемый лестничный подъемник, общий вид на фиг. 2 - устройство для перемещения грузовой платформы на фиг. 3 - упорный ролик платформы со стороны стены на фиг. 4 - стойка с приводом, включающим ведущую звездочку на выходном валу на фиг. 5 - стойка привода с храповым механизмом. Подъемник содержит грузовую платформу 1 (фиг. 1), установленную с помощью каретки 2, расположенной в верхней части вертикальной несущей стенки платформы, на направляющем рельсе 3 в виде прокатного швеллера, крепящегося через уголки 4 с отверстиями к элементам (стойкам) 5 несущих конструкций при помощи болтовых соединений. Стойки 5 в свою очередь сделаны таким образом, что в них есть отверстия под болтовые соединения, которыми стойки крепятся к стеновым кронштейнам 6 (фиг. 4) с овальными отверстиями. За счет этого достигается возможность регулировки выставления стоек относительно плоскости стены (неровные стены). Если в стене выполнены ниши или выступы, т.е. стойки 5 необходимо крепить на расстоянии от стены, тогда дополнительно они фиксируются кронштейнами и к ступеням (на фигурах не показаны). При таком способе крепления возможна регулировка выставления стоек по высоте (овальные отверстия). Также в стойках 5 выполнены вертикальные овальные отверстия, которыми они соединяются с направляющими уголками 7 и упорной трубой 8, в них сделаны ответные горизонтальные овальные отверстия, что позволяет осуществлять регулировку и выверку установки элементов при монтаже. Каретка 2 (фиг. 2) представляет собой конструкцию, состоящую из связи 9, крепящейся к двум пластинам 10, приваренным к несущей стенке платформы 1. Между ними находится два ролика 11, свободно вращающихся на шариковых подшипниках (на фигурах не показаны). В связи 9 выполнены отверстия для крепления цепной передачи. В нижней части платформа опирается на направляющую в виде металлической трубы 8 через регулируемый упор 12 (фиг. 3). Упор 12 выполнен с возможностью обеспечения установки платформы на лестничных маршах с различным углом наклона (как правило, от 21 до 27). Это позволяет регулировать установку грузовой платформы 1 из условия сохранения горизонтального положения грузовой платформы при перемещении. К основанию платформы 1 с обеих сторон крепятся ограничители 13 (фиг. 3), которые посредством роликов 14 опираются на направляющие уголки 7. Конструкция уголков 7 выполнена таким образом, что в начале движения с нижней лестничной площадки (за счет подгибов уголков) ролики 14 двигаясь, поднимают ограничители 13 в транспортировочное положение, препятствуя тем самым съезду инвалидного кресла с платформы. При подъезде к верхней площадке один из ограничителей (обращенный к площадке) опускается и касается пола площадки, обеспечивая съезд кресла с платформы 1. Подъемник оснащен устройством для перемещения грузовой платформы (фиг. 2),включающим расположенную на верхней лестничной площадке стойку 15 с привод, состоящим из мотор-редуктора 16, на выходном валу которого установлена ведущая звездочка 17 (фиг. 4). Стойка с приводом закрыты кожухами 18, 19 соответственно, к которым присоединяется защитный кожух 20, закрывающий направляющий рельс 3. Устройство для перемещения грузовой платформы включает в себя также два замкнутых контура цепной передачи. Первый контур 21 является рабочим. Он охватывает ведущую звездочку 17, далее его тяговая ветвь входит в зацепление с первой звездочкой 22 поворотного узла и крепится к каретке 2 платформы 1 вторая ветвь, возвратная - от веду 6 93482013.08.30 щей звездочки 17 через звездочку 23 узла САТП, вторую звездочку 24 поворотного узла, а затем и звездочку 25 разворотного узла 26 также крепится к каретке 2 платформы 1, образуя замкнутый контур. Второй контур 27 (контур САТП) охватывает звездочку 28, устроенную на зубчатом колесе храпового механизма 29 (фиг. 5), далее одна ветвь входит в зацепление со звездочкой 30 поворотного узла, соосной поворотной звездочке 22, и крепится к каретке 2 платформы 1 вторая ветвь - со звездочкой 31 поворотного узла, соосной поворотной звездочке 24, а затем и звездочку 32 разворотного узла, сосной поворотной звездочке 25, также крепится к каретке 2 платформы 1, образуя замкнутый контур, параллельный рабочему контуру, дублируя его. Работа привода осуществляется следующим образом ведущая звездочка 17, вращаясь,приводит в движение цепь рабочего контура 21, которая через звездочки поворотного и разворотного узлов передает усилие на платформу 1, и платформа начинает двигаться. САТП представляет собой пластину 33 (фиг. 5), на которой закреплен храповый механизм 29, состоящий из зубчатого колеса 34, соединенного со звездочкой 28 штифтами, и собачки 35. Зубчатое колесо 34 свободно вращается на шариковом подшипнике. Собачка 35 может свободно вращаться на оси 36, которая смещена относительно центра тяжести собачки. Вследствие этого одна сторона собачки имеет большую массу, чем другая. К собачке 35 на оси крепится звездочка 23, которая свободно вращается на шариковом подшипнике. Контур 27 САТП работает следующим образом. В случае обрыва цепи рабочего контура 21, возвратная ветвь которого охватывает звездочку 23 САТП, ослабевает натяжение цепи, и собачка 35 под собственным весом поворачивается относительно оси 36 и входит в зацепление с колесом 34 храпового механизма 29 и стопорит его. Так как колесо 34 жестко соединено со звездочкой 28, то звездочка также стопорится, и цепь контура САТП перестает двигаться, а поскольку контур 27 полностью дублирует рабочий контур 21, то платформа останавливается. Этот механизм работы предотвращает резкое падение платформы при обрыве рабочей цепи. Натяжение цепи рабочего контура и контура САТП выполняется с помощью разворотного узла 26, в котором выполнены овальные отверстия, и натяжного уголка 37. Подтяжка цепи контура САТП осуществляется пластиной 33, в которой выполнены овальные отверстия, позволяющие производить регулировку выставления узла САТП по высоте. Подъемник оснащен системой автоматического включения привода с радиочастотным управлением, что позволяет управлять им с расстояния, при этом чип с пультом управления находится у инвалида, а блок радиоуправления находится на стойке привода. Такая конструкция платформы и несущей составляющей подъемника обеспечивает универсальность при изготовлении отдельных деталей и узлов, что значительно упрощает производство, а также повышает технологичность монтажа подъемника на объекте под разные углы наклона лестничных маршей. Конструкция привода обеспечивает простоту в наладке и работе подъемника, но при этом сохраняется высокая надежность и безопасность его функционирования за счет использования в качестве тягового элемента - цепной передачи и второго контура - контура САТП. Все это в конечном итоге приводит к удешевлению работ при изготовлении и монтаже, а следовательно, к снижению стоимости. Лестничный подъемник работает следующим образом. Для транспортировки, например, с нижней лестничной площадки на верхнюю инвалид на коляске въезжает на грузовую платформу 1 или заходит на нее, если может передвигаться без коляски. После заезда коляски на площадку платформы 1 с помощью пульта подается сигнал на блок радиоуправления, этот блок по цепи дает управляющий сигнал частотному преобразователю о включении мотор-редуктора 16, который начинает вращать ведущую звездочку 17, соединенную с цепью замкнутого рабочего контура 21. Усилие от цепи через каретку 2 передается платформе, и она начинает перемещаться по рельсу 3 вдоль лест 7 93482013.08.30 ничного марша. Ролики 14 набегают на направляющие уголки 7 и поворачивают ограничители 13 в транспортировочное положение. Вместе с рабочим контуром цепи свободно(без нагрузки) параллельно перемещается и замкнутый контур САТП 27. Во время движения грузовой платформы инвалид держится за поручень 38, что повышает безопасность подъема-спуска. При подходе к верхней лестничной площадке грузовая платформа касается концевого выключателя привода (на фигурах не показан), контакт размыкается, и платформа 1 останавливается. При этом ролик 14 сбегает с уголка 7, и ограничитель, обращенный к верхней площадке, опускается и касается пола. Инвалид в коляске съезжает с площадки грузовой платформы или сходит с нее, если он может передвигаться без коляски. Далее инвалид посредством дистанционного пульта подает сигнал на блок радиоуправления,этот блок по цепи дает управляющий сигнал частотному преобразователю о включении мотор-редуктора 16, и платформа 1 возвращается в первоначальное положение. Транспортировка инвалида с верхней лестничной площадки на нижнюю производится аналогично. Основное усилие для удержания грузовой платформы при спуске приходится на участок ветви цепной передачи рабочего контура между кареткой 2 и ведущей звездочкой 17. Скорость движения платформы определяется режимом работы частотного преобразователя. Заявленная полезная модель может быть изготовлена промышленным способом с использованием современных материалов и технологий, что подтверждает ее промышленную применимость. Фиг. 5 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 9
МПК / Метки
МПК: B66B 9/08
Метки: подъемник, инвалидов, лестничный
Код ссылки
<a href="https://by.patents.su/9-u9348-lestnichnyjj-podemnik-dlya-invalidov.html" rel="bookmark" title="База патентов Беларуси">Лестничный подъемник для инвалидов</a>
Подъёмник для инвалидов
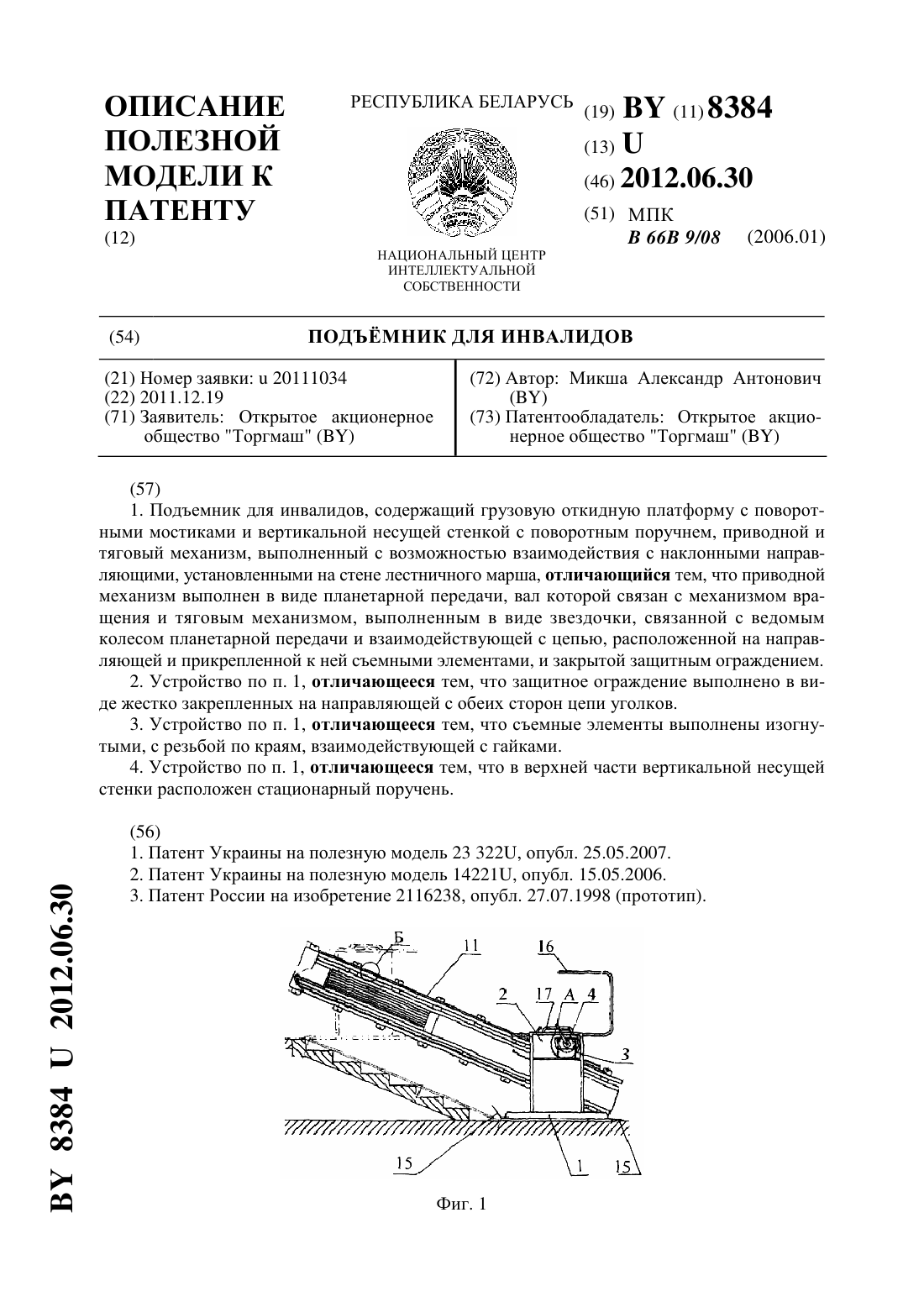
Номер патента: U 8384
Опубликовано: 30.06.2012
Автор: Микша Александр Антонович
МПК: B66B 9/08
Текст:
...в части неудобства использования ступеней лестничного марша другими лицами, так как его направляющие закреплены на стене. Его грузовая откидная платформа убирается к вертикальной несущей стенке по окончании работы, не мешая проходу других лиц. Но он имеет сложные приводной и тяговый механизмы и сложен в изготовлении и ремонте. Техническая задача, на решение которой направлена данная полезная модель, заключается в создании устройства...
Подъемник
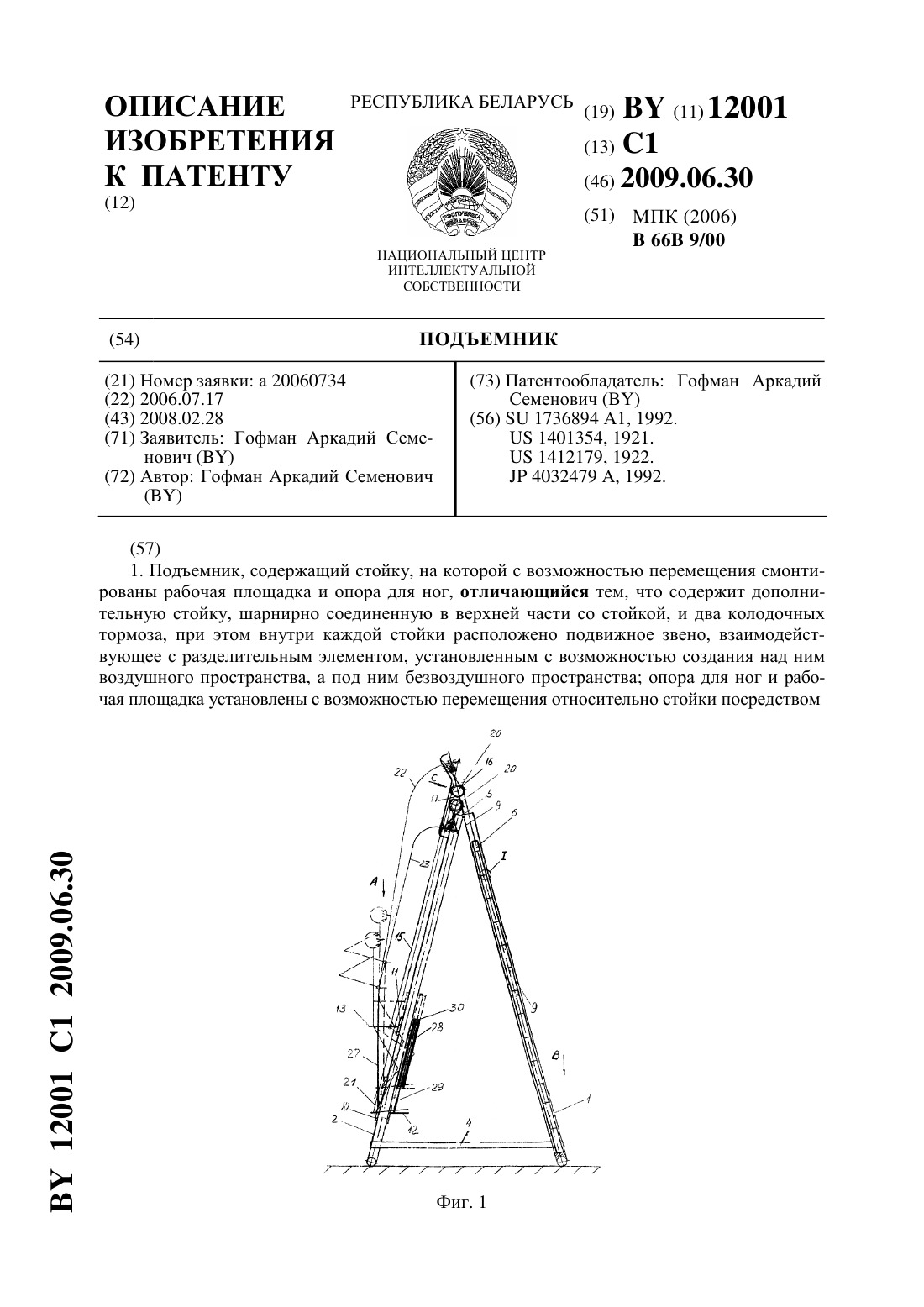
Номер патента: 12001
Опубликовано: 30.06.2009
Автор: Гофман Аркадий Семенович
МПК: B66B 9/00
Метки: подъемник
Текст:
...причем каждая звездочка сблокирована со шкивом ее колодочного тормоза, управляемого посредством связанного с ним троса, соединенного свободным концом с соответствующим рычагом управления подъемом либо опоры для ног, либо подъемом рабочей площадки, а рычаги управления установлены на рулевой колонке, прикрепленной к опоре для ног подъемник содержит две установленные с возможностью скольжения по стойке втулки, на одной из которых закреплена...
Подъемник для монтажа, демонтажа и обслуживания вертикальных конструкций

Номер патента: U 3707
Опубликовано: 30.06.2007
Автор: ЦЫГАНОК Александр Иванович
МПК: E04H 12/00, B66D 3/00
Метки: обслуживания, конструкций, монтажа, подъемник, демонтажа, вертикальных
Текст:
...на примере наиболее сложного в техническом отношении монтажа среди вертикальных конструкций - монтажа ветроэнергетической установки с поворотной платформой и ветроколесом наверху. Для других вертикальных конструкций и сооружений монтаж, демонтаж и обслуживание производятся без изменений в конструкции предлагаемого подъемника и в процессе его работы. На фиг. 1 представлена схема подъема на башню ветроэнергетической установки поворотной...
Устройство для перемещения инвалидов в ванну
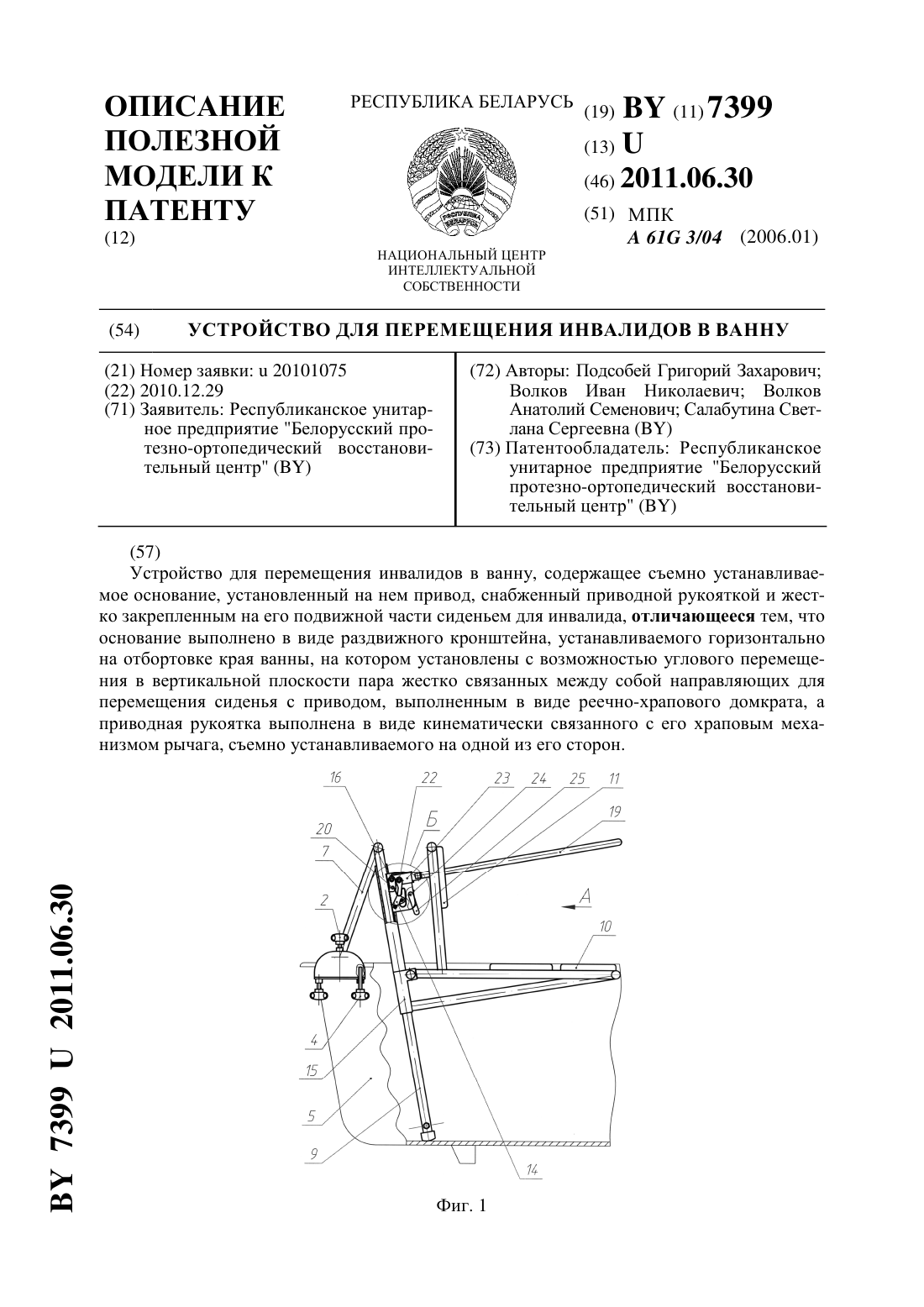
Номер патента: U 7399
Опубликовано: 30.06.2011
Авторы: Салабутина Светлана Сергеевна, Волков Иван Николаевич, Волков Анатолий Семенович, Подсобей Григорий Захарович
МПК: A61G 3/04
Метки: устройство, перемещения, инвалидов, ванну
Текст:
...рычага, съемно устанавливаемого на одной из его сторон. Заявляемое устройство менее громоздко, обеспечивает возможность его установки на ванне, не загромождая ее боковую сторону, что обеспечивает удобство перемещения инвалида с инвалидной коляски на сиденье устройства, дает возможность инвалиду самостоятельно осуществлять движение приводного рычага при перемещении в ванну или из нее как правой, так и левой рукой в зависимости от его...
Тренажер для реабилитации инвалидов с ампутированной нижней конечностью
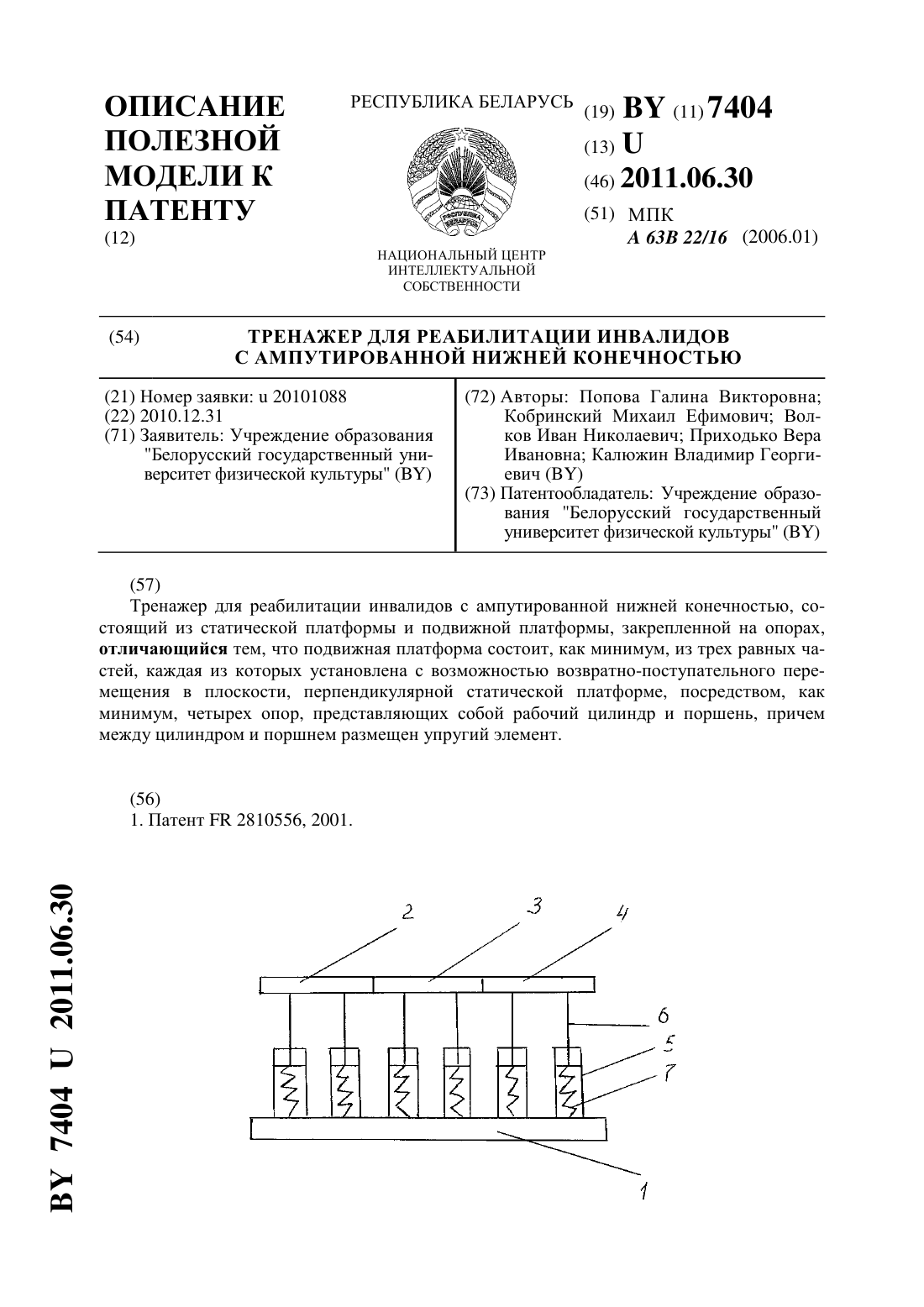
Номер патента: U 7404
Опубликовано: 30.06.2011
Авторы: Кобринский Михаил Ефимович, Приходько Вера Ивановна, Волков Иван Николаевич, Попова Галина Викторовна, Калюжин Владимир Георгиевич
МПК: A63B 22/16
Метки: ампутированной, нижней, конечностью, инвалидов, реабилитации, тренажер
Текст:
...так и динамическое равновесие при перемещении. Поставленная задача решается следующим образом. Предложен тренажер для реабилитации инвалидов с ампутированной нижней конечностью, состоящий из статической платформы и подвижной платформы, закрепленной на опорах, при этом подвижная платформа состоит, как минимум, из трех равных частей, каждая из которых установлена с возможностью возвратно-поступательного перемещения в плоскости,...
Предыдущий патент: Бортовая система управления электрооборудованием транспортного средства
Следующий патент: Устройство для очистки трубопроводов
Случайный патент: Нагревательное устройство, закрепленное на камере сгорания и работающее на дизельном топливе