Зенитный ракетный комплекс
Номер патента: U 7052
Опубликовано: 28.02.2011
Авторы: Быков Игорь Михайлович, Фирсаков Александр Анатольевич, Краевский Юрий Геннадьевич, Папушой Виталий Иванович
Текст
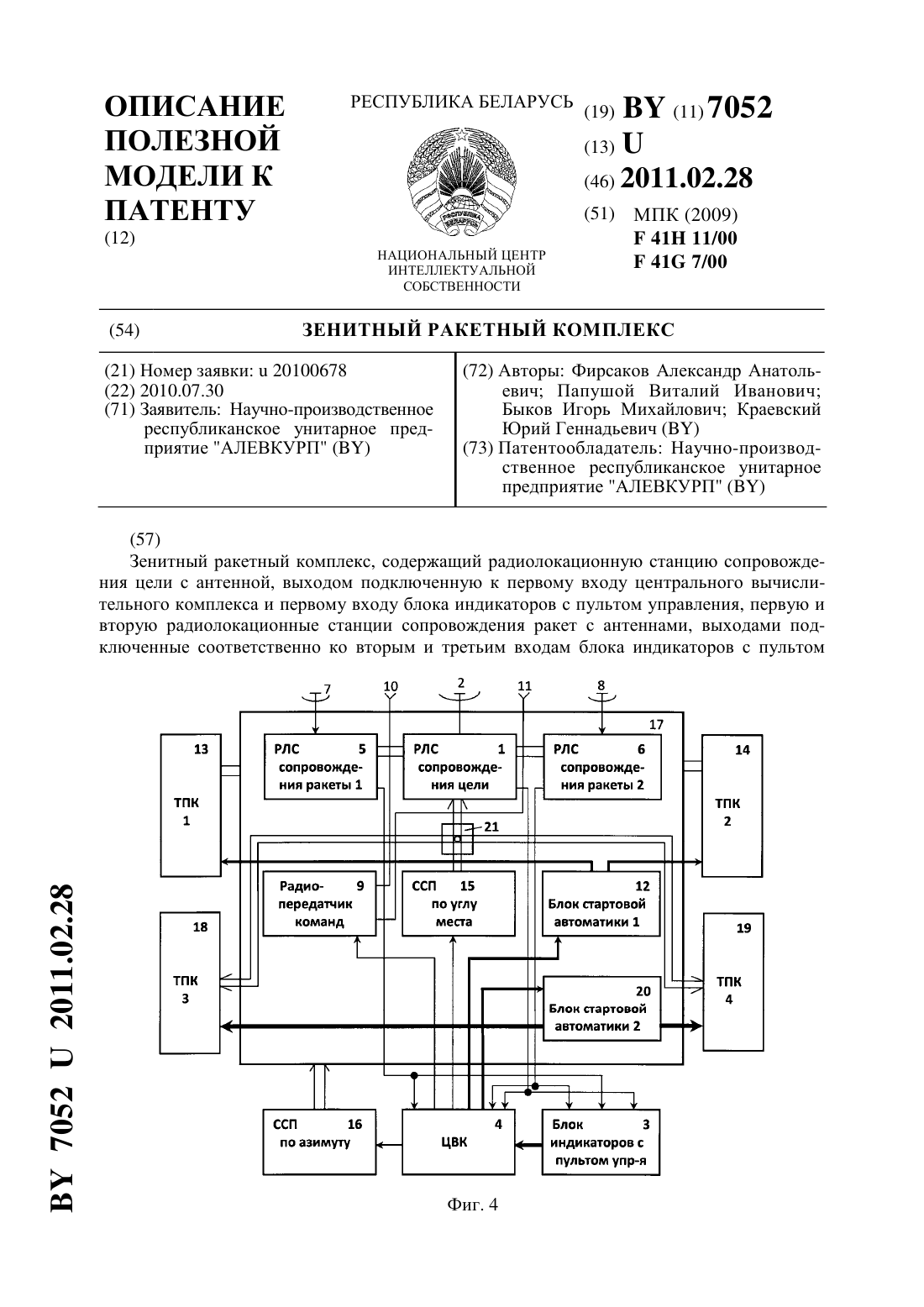
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Научно-производственное республиканское унитарное предприятие АЛЕВКУРП(72) Авторы Фирсаков Александр Анатольевич Папушой Виталий Иванович Быков Игорь Михайлович Краевский Юрий Геннадьевич(73) Патентообладатель Научно-производственное республиканское унитарное предприятие АЛЕВКУРП(57) Зенитный ракетный комплекс, содержащий радиолокационную станцию сопровождения цели с антенной, выходом подключенную к первому входу центрального вычислительного комплекса и первому входу блока индикаторов с пультом управления, первую и вторую радиолокационные станции сопровождения ракет с антеннами, выходами подключенные соответственно ко вторым и третьим входам блока индикаторов с пультом 70522011.02.28 управления и центрального вычислительного комплекса, первый выход центрального вычислительного комплекса подключен ко входу радиопередатчика команд, первый и второй выходы которого соединены соответственно с первой и второй антеннами передачи команд, второй выход центрального вычислительного комплекса подключен ко входу первого блока стартовой автоматики, первый и второй выходы которого соответственно соединены со входами первого и второго транспортно-пусковых контейнеров с зенитными управляемыми ракетами радиокомандного наведения, третий выход центрального вычислительного комплекса подключен ко входу силового следящего привода по углу места,выход которого механически связан с радиолокационной станцией сопровождения цели,четвертый выход центрального вычислительного комплекса подключен ко входу силового следящего привода по азимуту, выход которого механически связан с опорно-поворотной платформой, которая конструктивно объединяет радиолокационные станции сопровождения цели и ракет с соответствующими антеннами, радиопередатчик команд с соответствующими антеннами, блок стартовой автоматики и силовой следящий привод по углу места, с опорно-поворотной платформой механически жестко соединены первый и второй транспортно-пусковые контейнеры, а радиолокационные станции сопровождения ракет механически жестко соединены с радиолокационной станцией сопровождения цели, связи от блока стартовой автоматики на первый и второй транспортно-пусковые контейнеры, а также со вторым выходом центрального вычислительного комплекса являются шинами обмена командами и сигналами, выход блока индикаторов с пультом управления соединен с четвертым входом центрального вычислительного комплекса шиной обмена командами и сигналами, отличающийся тем, что дополнительно введены третий и четвертый транспортно-пусковые контейнеры с самонаводящимися зенитными ракетами, оснащенными пассивными головками самонаведения оптического диапазона, входы этих контейнеров соответственно подключены шинами обмена командами и сигналами к первому и второму выходам второго блока стартовой автоматики, вход которого соединен с пятым выходом центрального вычислительного комплекса шиной обмена командами и сигналами, силовой следящий привод по углу места механически соединен с радиолокационной станцией сопровождения цели через распределительный редуктор, второй и третий выходы которого механически связаны с третьим и четвертым транспортно-пусковыми контейнерами соответственно, при этом оси головок самонаведения зенитных ракет в третьем и четвертом транспортно-пусковых контейнерах коллинеарны с осью диаграммы направленности антенны радиолокационной станции сопровождения цели.(56) 1. Неупокоев Ф.К. Стрельба зенитными ракетами. - М. Воениздат, 1991. 2. Автономный войсковой зенитный ракетный комплекс Оса Учебное пособие для войск ПВО Сухопутных войск. - М. Воениздат, 1991. 3. Гамаюнов В.И., Якшонок П.П. Зенитный ракетный комплекс ближнего действия СТРЕЛА-10 М 2 Устройство и эксплуатация боевых средств комплекса. Кн. 1. - Минск ВАРБ, 2001. 4. Мисько В.А., Якшонок П.П. Устройство и эксплуатация переносного зенитного ракетного комплекса Игла Учебное пособие. - Минск Изд. ВА РБ, 2002. 5. Зенитное ракетное оружие мира Серия справочников Оружие мира. - М. Научнотехнической информации русских оборонных систем и предприятий, 2005. Известны зенитные ракетные комплексы (ЗРК) с использованием зенитных управляемых ракет (ЗУР), наводимых по радиокомандам 1, 2. Наведение на цель таких ЗУР осуществляется путем измерения текущих координат цели и каждой наводимой ЗУР,2 70522011.02.28 формирования команд управления ЗУР в зависимости от разницы этих координат и передачи команд управления на борт ЗУР по линии радиосвязи. Также известны ЗРК с использованием самонаводящихся ЗУР 1, 3, в которых команды управления формируются на борту ЗУР по результатам измерения координат цели бортовым устройством визирования цели радиолокационного или оптического (инфракрасного или/и видимого) диапазона длин волн. При этом для визирования цели могут использоваться как собственное излучение цели в инфракрасном диапазоне 4, так и отраженные от цели радиолокационные сигналы подсвета 5 или рассеянное излучение солнца видимого диапазона. Наиболее близким к заявляемому объекту является зенитный ракетный комплекс 9 К 33 Оса 2, который содержит (фиг. 1) радиолокационную станцию сопровождения цели(РЛС СЦ) 1 с общей на прием и излучение антенной 2, выход РЛС СЦ подключен к первому входу блока индикаторов 3 с пультом управления и первому входу центрального вычислительного комплекса (ЦВК) 4, первую 5 и вторую 6 радиолокационные станции сопровождения ракет (РЛС СР) с приемными антеннами 7 и 8 соответственно, выходы первой 5 и второй 6 РЛС СР подключены соответственно ко второму и третьему входам блока 3 индикаторов с пультом управления и второму и третьему входам ЦВК 4. Первый выход ЦВК 4 подключен ко входу радиопередатчика команд (РПК) 9, первый и второй выходы которого подключены соответственно к антеннам 10 и 11 передачи команд, второй выход ЦВК 4 подключен ко входу блока 12 стартовой автоматики, первый и второй выходы которого подключены соответственно ко входам первого 13 и второго 14 транспортно-пусковых контейнеров (ТПК) с ЗУР, третий выход ЦВК 4 подключен ко входу силового следящего привода (ССП) 15 по углу места, четвертый выход ЦВК 4 подключен ко входу силового следящего привода 16 по азимуту, а четвертый вход ЦВК 4 подключен к выходу блока 3 индикаторов с пультом управления. При этом РЛС СР 5 и 6 механически жестко соединены с РЛС СЦ 1, которая механически связана с выходом ССП 15 по углу места, при этом блоки 1, 2, 5, 6, 7, 8, 9, 10, 11, 12, 15 объединены конструктивно в опорноповоротную платформу 17, с которой механически жестко соединены ТПК 13 и 14 с ЗУР,а платформа 17 механически связана с выходом ССП 16 по азимуту. Перечисленные устройства, блоки и связи являются функционально необходимыми для работы ЗРК. ЗРК-прототип работает следующим образом. При совмещении диаграммы направленности антенны (ДНА) 2 с целью (фиг. 2) последняя обнаруживается РЛС СЦ 1 (положение а). При этом радиолокационный сигнал цели с выхода РЛС СЦ 1 поступает на первый вход блока 3 для отображения на индикаторах и на первый вход ЦВК 4, который осуществляет захват на сопровождение и измерение координат цели в следящем режиме по командам с выхода пульта управления 3 или автоматически. Следящее сопровождение цели по углу места (с вертикальной плоскости) и азимуту (в горизонтальной плоскости) осуществляется путем непрерывного совмещения оси ДНА 2 с целью путем управления приводом 16 по азимуту платформой 17 и управления РЛС СЦ 1 по углу места приводом 15. По результатам сопровождения цели в ЦВК 4 производится экстраполяция ее траектории на момент встречи ЗУР с целью и, при ее попадании в зону поражения ЗРК, со второго выхода ЦВК 4 команда пуска поступает в блок 12 стартовой автоматики, который формирует необходимый для пуска ЗУР набор команд и сигналов, поступающих соответственно с первого или второго выходов блока 12 на транспортно-пусковой контейнер 13 или 14 с ЗУР. Также в блоке 12 обеспечивается формирование необходимых команд и сигналов предпусковой подготовки ЗУР. При этом команда пуска поступает в ЦВК 4 от блока 3 или формируется в ЦВК автоматически. После старта ракеты с первого или второго выхода РПК 9 в антенну передачи команд 10 или 11 соответственно поступают радиосигналы запроса, формируемые в РПК 9 под действием сигналов с первого выхода ЦВК 4. Запросные сигналы, излучаемые антенной 10 или 11, соответствующей наводимой ЗУР,запущенной из контейнера 13 или 14 соответственно, принимаются бортовой аппаратурой этой ЗУР, перекодируются, преобразуются на рабочую частоту РЛС 5 или РЛС 6 и излу 3 70522011.02.28 чаются ракетой в направлении ЗРК. Эти ответные сигналы принимаются соответственно РЛС СР 5 или 6 через антенну 7 или 8 соответственно, диаграммы направленности которых ДНА 7 (8) существенно шире, чем ДНА 2 (фиг. 2). Принятые РЛС СР 5 или 6 ответные сигналы используются для измерения координат ЗУР и поступают соответственно на второй или третий вход ЦВК 4, где в следящем режиме осуществляется измерение координат ЗУР. Также эти сигналы поступают на второй и третий входы блока 3 для отображения на индикаторах. В соответствии с измеренными значениями координат цели и ЗУР в ЦВК 4 формируются команды управления ЗУР, которые с первого выхода ЦВК 4 поступают в РПК 9, где кодируются, преобразуются на радиочастоту бортовой аппаратуры ЗУР и через антенну передачи команд 10 или 11 излучаются в направлении ЗУР (фиг. 2), обеспечивая наведение ЗУР на цель (положение б). В процессе сопровождения цели от момента ее обнаружения (положение а на фиг. 2) до встречи с ЗУР (положение б на фиг. 2) угловые координаты цели существенно изменяются, и угловое следящее сопровождение цели осуществляется за счет управления положением РЛС СЦ 1 с антенной 2 и механически жестко связанных с ней РЛС СР 5 и 6 с антеннами 7 и 8 соответственно в вертикальной плоскости ССП по углу места 15, а в горизонтальной плоскости - за счет поворота всей платформы 17 ССП по азимуту 16. При этом управление ССП 15 и 16 осуществляется сигналами с третьего и четвертого выходов ЦВК 4 соответственно. Контейнеры с ЗУР 13 и 14, механически жестко соединенные с платформой 17, также разворачиваются в направлении цели по азимуту, но угол возвышения контейнеров с ЗУР фиксирован. В таком составе ЗРК обеспечивается наведение на цель двух ЗУР одновременно, радиоканалы управления которыми могут иметь частотное или кодовое разделение. Такими ракетами ЗРК может поражать цели в пределах зоны поражения. Зона поражения ЗРКпрототипа в вертикальной плоскости имеет конфигурацию, показанную на фиг. 3 а, и характеризуется интервалом дальностей от 1 до 2 и максимальной высотой 1. Как видно, ЗРК-прототип, во-первых, не обеспечивает поражение цели, если ее угол местав момент атаки ЗУР превышает 45, что обусловливает наличие над ЗРК мертвой зоны и делает ЗРК уязвимым для боеприпасов (авиационных ракет и бомб) и целей, атакующих ЗРК при 45, а также ограничивает возможности поражения скоростных целей,преодолевающих зону поражения ЗРК. Во-вторых, ЗРК подвержен воздействию радиопомех по радиоканалу ответа и сопровождения ЗУР по радиоканалу управления ЗУР. При воздействии этих помех может иметь место срыв сопровождения ЗУР или срыв управления ЗУР и, как результат, непоражение цели. Технической задачей, на решение которой направлен заявляемый объект, является преодоление указанных недостатков. Заявляемый объект (фиг. 4) содержит радиолокационную станцию сопровождения цели (РЛС СЦ) 1 с антенной 2, выходом подключенную к первому входу блока 3 индикаторов с пультом управления и первому входу ЦВК 4, первую 5 и вторую 6 РЛС сопровождения ракет с антеннами визирования ракет 7 и 8 соответственно, выходами подключенные соответственно ко вторым и третьим входам блока 3 индикаторов и ЦВК 4,радиопередатчик команд 9, первым и вторым выходами подключенный к антеннам передачи команд 10 и 11 соответственно, а по входу соединенный с первым выходом ЦВК 4,второй выход ЦВК 4 подключен ко входу первого блока 12 стартовой автоматики, первый и второй выходы которого подключены соответственно ко входам первого 13 и второго 14 транспортно-пусковых контейнеров с ЗУР радиокомандного наведения, третий выход ЦВК 4 подключен ко входу ССП 15 по углу места, выход которого механически связан с РЛС 1 сопровождения цели, четвертый выход ЦВК 4 подключен ко входу ССП 16 по азимуту,выход которого механически связан с опорно-поворотной платформой 17, конструктивно 4 70522011.02.28 объединяющей блоки 1, 2, 5, 6, 7, 8, 9, 10, 11, 12, 15, при этом ТПК 13 и 14 механически жестко соединены с платформой 17, первая и вторая РЛС СР 5 и 6 механически жестко соединены с РЛС СЦ 1, связи от блока 12 на ТПК 13 и 14 и от блока 12 на ЦВК 4 являются шинами обмена командами и сигналами, а выход блока 3 индикаторов с пультом управления соединен с четвертым входом ЦВК 4, и эта связь также является шиной обмена сигналами и командами, и отличается тем, что дополнительно введены третий и четвертый транспортно-пусковые контейнеры 18 и 19 с самонаводящимися ЗУР, оснащенными пассивными головками самонаведения оптического диапазона, входы этих контейнеров 18 и 19 подключены соответственно к первому и второму выходам второго блока 20 стартовой автоматики, вход которого соединен с пятым выходом ЦВК 4, ССП 15 по углу места механически связан с РЛС СЦ 1 через распределительный редуктор 21, второй и третий выходы которого механически связаны с ТПК 18 и 19, причем связи от второго блока 20 на входы ТПК 18 и 19, с входа блока 20 на пятый вход ЦВК являются шинами обмена командами и сигналами, а оси ЗУР в ТПК 18 и 19 установлены взаимно коллинеарными с осью ДНА 2 РЛС СЦ 1. При этом блок 20 может быть конструктивно включен в опорноповоротную платформу 17 или установлен вне ее. Заявляемый ЗРК работает следующим образом. Аналогично прототипу, при совмещении ДНА 2 с направлением на цель (фиг. 2) последняя обнаруживается РЛС СЦ 1 (фиг. 2,положение а) и радиолокационный сигнал цели с выхода РЛС 1 поступает на первый вход блока 3 для отображения на индикаторах и на первый вход ЦВК 4, который осуществляет захват на сопровождение и измерение координат цели в следящем режиме. Следящее сопровождение цели по направлению осуществляется путем непрерывного совмещения с целью оси ДНА 2 путем разворота по азимуту платформы 17 приводом 16 и поворота по углу места РЛС 1 приводом 15. Одновременно с направлением на цель совмещаются оси ДНА 7 и 8 РЛС СР 5 и 6, механически жестко связанных с РЛС 1. После пуска телеуправляемых ЗУР из ТПК 13 и 14 радиопередатчик команд 9 под воздействием сигналов с первого выхода ЦВК 4 формирует радиосигналы запроса ЗУР и команды управления ЗУР,которые излучаются в направлении ракет через антенну 10 или 11. В ответ на запросные радиосигналы бортовой ответчик ЗУР излучает ответные радиосигналы, которые принимаются РЛС СР 5 или 6 через антенну 7 или 8 соответственно и используются для определения координат наводимых ЗУР, для чего выходные сигналы РЛС 5 и 6 поступают соответственно на второй и третий входы ЦВК 4, где осуществляется их следящее сопровождение, экстраполяция траектории, сравнение с координатами цели и формирование команд управления ЗУР. Этим обеспечивается автоматическое наведение на цель до двух ЗУР одновременно. Также сигналы от РЛС 5 и 6 поступают соответственно на второй и третий входы блока индикаторов 3 для отображения. Блок 12 стартовой автоматики, соединенный шиной обмена со вторым выходом ЦВК, обеспечивает (под действием команд ЦВК) формирование команд запуска ЗУР, поступающих в ТПК 13 и 14, а также обмен с ТПК необходимыми сигналами и командами предпусковой подготовки ЗУР и выработку необходимых сигналов готовности ЗУР для ЦВК и индикации. Если в процессе сопровождения цели и экстраполяции ее траектории в ЦВК 4 будет установлено, что встреча ЗУР с целью может произойти вне зоны а (фиг. 3), например,при угле места цели 45, то команды предпусковой подготовки с пульта блока 3 через ЦВК 4 или автоматически от ЦВК 4 поступают с пятого выхода ЦВК 4 во второй блок 20 стартовой автоматики, который обеспечивает обмен необходимыми командами и сигналами с ТПК 18 и 19 для предпусковой подготовки и пуска содержащихся в этих ТПК ЗУР с оптической головкой самонаведения. При этом оптическая ось ГСН, совмещенная с осью ракеты в ТПК, постоянно совмещается с направлением на цель за счет разворота платформы 17 по азимуту ССП 16 и по углу места поворотом ТПК в вертикальной плоскости за счет механической связи с выходом ССП по углу места 15 через редуктор 21. При 5 70522011.02.28 приеме ГСП ЗУР сигнала цели и его обнаружении формируется сигнал захвата ГСП. Этот сигнал от ГСП ЗУР из ТПК 18 или 19 поступает во второй блок 20 стартовой автоматики и через шину обмена воспринимается ЦВК 4 и отображается на индикаторах блока 3. Команда пуска самонаводящейся ЗУР с пульта блока 3 или формируемая автоматически ЦВК 4 с пятого выхода ЦВК поступает в блок 20 и с него в виде необходимой последовательности команд и сигналов - на ТПК 18 или 19 с ЗУР, чем обеспечивается пуск ракеты с ГСН оптического диапазона по сопровождаемой РЛС 1 цели. Поскольку угловое возвышение самонаводящейся ЗУР с оптической ГСН при пуске может достигать 80 3, то зона поражения в вертикальной плоскости имеет конфигурацию б, как показано на фиг. 3, что обеспечивает поражение целей в мертвой зоне ЗРКпрототипа до высоты 2 и по дальности от 3 до 4. Кроме того, в заявляемом объекте обеспечивается последовательное воздействие на преодолевающую зону огня цель ракетами двух различных типов с радиокомандным наведением (на интервале дальностей от 2 до 1) и самонаводящимися с оптической ГСН (на интервале дальностей от 4 до 3),что особенно важно в условиях возможного срыва радиокомандного наведения ЗУР вследствие воздействия радиоэлектронных помех. Также достигается повышение огневой производительности ЗРК при поражении целей на интервале от 1 до 4 самонаводящимися ракетами вследствие отсутствия необходимости сопровождать после пуска ЗУР поражаемую цель РЛС 1 может быть начат цикл боевой работы по новой цели. Перечисленные факторы определяют положительный эффект, достигаемый заявляемым объектом. Материалы заявки поясняются следующими фигурами графических изображений фиг. 1 блок-схема ЗРК-прототипа фиг. 2 диаграммы, поясняющие работу ЗРК фиг. 3 диаграммы зон поражения фиг. 4 блок-схема заявляемого объекта. Заявляемый объект содержит (фиг. 4) радиолокационную станцию сопровождения цели (РЛС СЦ) 1 с антенной 2, выходом подключенную к первому входу блока 3 индикаторов с пультом управления и первому входу ЦВК 4, первую 5 и вторую 6 РЛС сопровождения ракет с антеннами визирования ракет 7 и 8 соответственно, выходами подключенные соответственно ко вторым и третьим входам блока 3 индикаторов и ЦВК 4, радиопередатчик команд 9, первым и вторым выходами подключенный к антеннам передачи команд 10 и 11 соответственно, а по входу соединенный с первым выходом ЦВК 4, второй выход ЦВК 4 подключен к входу первого блока 12 стартовой автоматики, первый ивторой выходы которого подключены соответственно ко входам первого 13 и второго 14 транспортно-пусковых контейнеров с ЗУР радиокомандного наведения, третий выход ЦВК 4 подключен ко входу ССП 15 по углу места, выход которого механически связан с РЛС 1 сопровождения цели, четвертый выход ЦВК 4 подключен ко входу ССП 16 по азимуту,выход которого механически связан с опорно-поворотной платформой 17, конструктивно объединяющей блоки 1, 2, 5, 6, 7, 8, 9, 10, 11, 12, 15, при этом ТПК 13 и 14 механически жестко соединены с платформой 17, первая и вторая РЛС СР 5 и 6 механически жестко соединены с РЛС СЦ 1, связи от блока 12 на ТПК 13 и 14 и от блока 12 на ЦВК 4 являются шинами обмена командами и сигналами, а выход блока 3 индикаторов с пультом управления соединен с четвертым входом ЦВК 4, и эта связь также является шиной обмена сигналами и командами, и отличается тем, что дополнительно введены третий и четвертый транспортно-пусковые контейнеры 18 и 19 с самонаводящимися ЗУР, оснащенными пассивными головками самонаведения оптического диапазона, входы этих контейнеров 18 и 19 подключены соответственно к первому и второму выходам второго блока 20 стартовой автоматики, вход которого соединен с пятым выходом ЦВК 4, ССП 15 по углу места механически связан с РЛС СЦ 1 через распределительный редуктор 21, второй и третий выходы которого механически связаны с ТПК 18 и 19, причем связи от второго блока 20 на входы ТПК 18 и 19, с входа блока 20 на пятый вход ЦВК являются шинами обмена ко 6 70522011.02.28 мандами и сигналами, а оси ЗУР в ТПК 18 и 19 установлены взаимно коллинеарными с осью ДНА 2 РЛС СЦ 1. Все узлы и блоки заявляемого объекта могут быть реализованы с использованием известных технических решений РЛС 1 с антенной 2, РЛС 5 и 6 с антеннами 7 и 8, РПК 9 с антеннами 10 и 11, блок 3 индикаторов с пультом, силовые следящие приводы 15 и 16, блок 12 стартовой автоматики известны и соответствуют узлам ЗРК-прототипа 2, ТПК 13 и 14 - штатные ТПК ЗРКпрототипа с ЗУР 9 М 33 М (М 2, М 3), общее количество которых может быть от двух(фиг. 4) до шести 2 ТПК 18 и 19 - штатные ТПК с ЗУР 937 (-37 М, -37 МД), общее количество которых может быть от двух (фиг. 4) до четырех 3, как и известный блок 20 стартовой автоматики ЗРК Стрела-10 3 ЦВК - может быть использован как специализированный цифровой вычислитель типа Багет, так и универсальный компьютер с соответствующими портами обмена и программным обеспечением. Таким образом, по мнению авторов, заявляемый объект удовлетворяет критерию новизна, имеет положительный эффект и является промышленно применимым. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: F41G 7/00, F41H 11/00
Метки: комплекс, зенитный, ракетный
Код ссылки
<a href="https://by.patents.su/8-u7052-zenitnyjj-raketnyjj-kompleks.html" rel="bookmark" title="База патентов Беларуси">Зенитный ракетный комплекс</a>
Комплекс водоснабжения
Номер патента: 7030
Опубликовано: 30.06.2005
Авторы: Панасюк Анатолий Иванович, Гуринович Анатолий Дмитриевич
МПК: E03B 11/16, E03B 7/04
Метки: комплекс, водоснабжения
Текст:
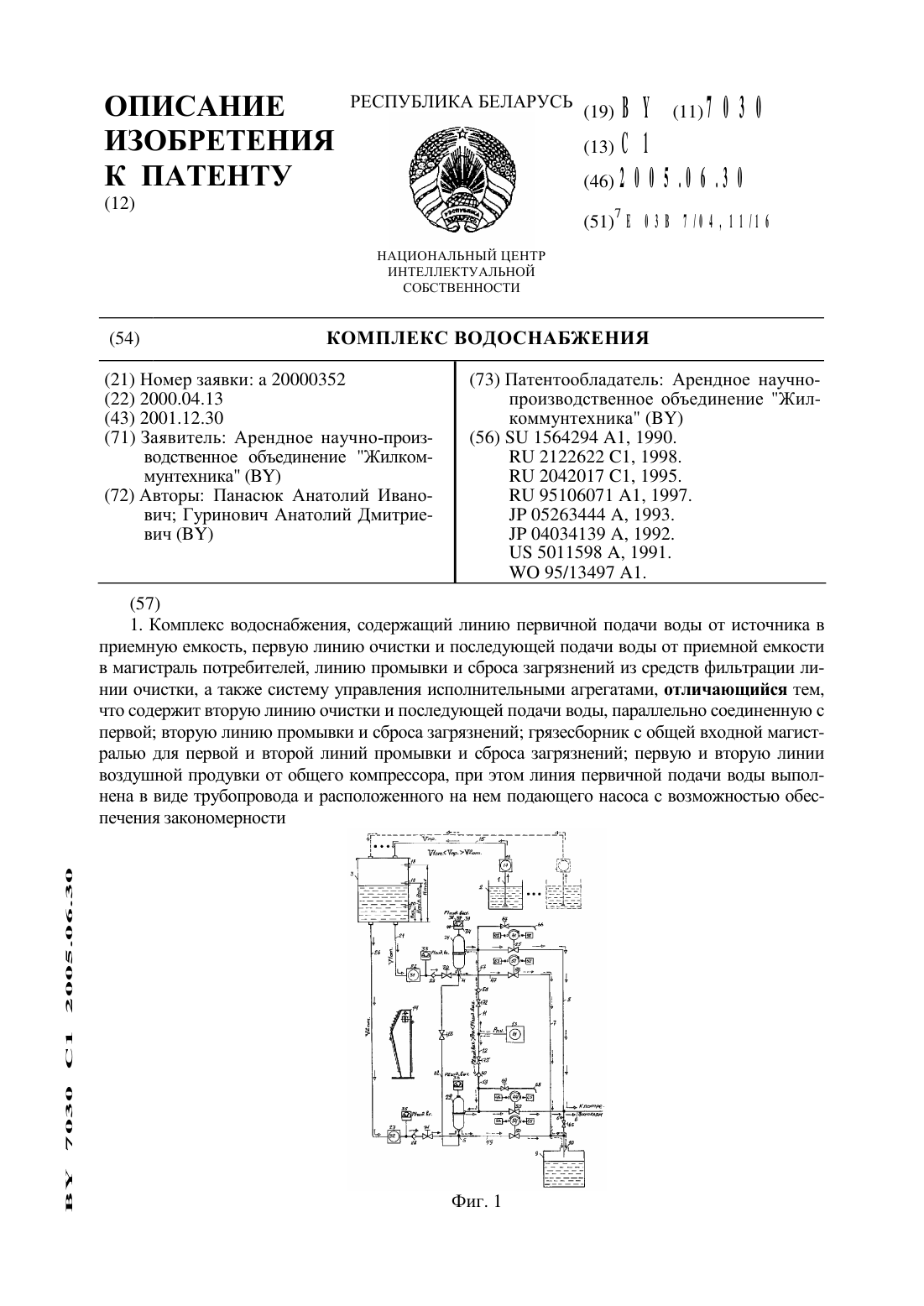
...в положении,отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра, а в датчике давления на выходе каждого скорого фильтра задатчик минимально допустимо ВУ 7030 С 12005.06.30го давления установлен относительно измерительной щкалы в положении, отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра и снижению интенсивности подачи воды потребителям, при этом задатчик максимально допустимого...
Система наведения телеуправляемой ракеты при ручном сопровождении цели
Номер патента: U 1347
Опубликовано: 30.06.2004
Авторы: Левадный Александр Николаевич, Кун Александр Александрович, Шабан Сергей Александрович
МПК: F41G 7/30
Метки: ракеты, телеуправляемой, наведения, система, цели, ручном, сопровождении
Текст:
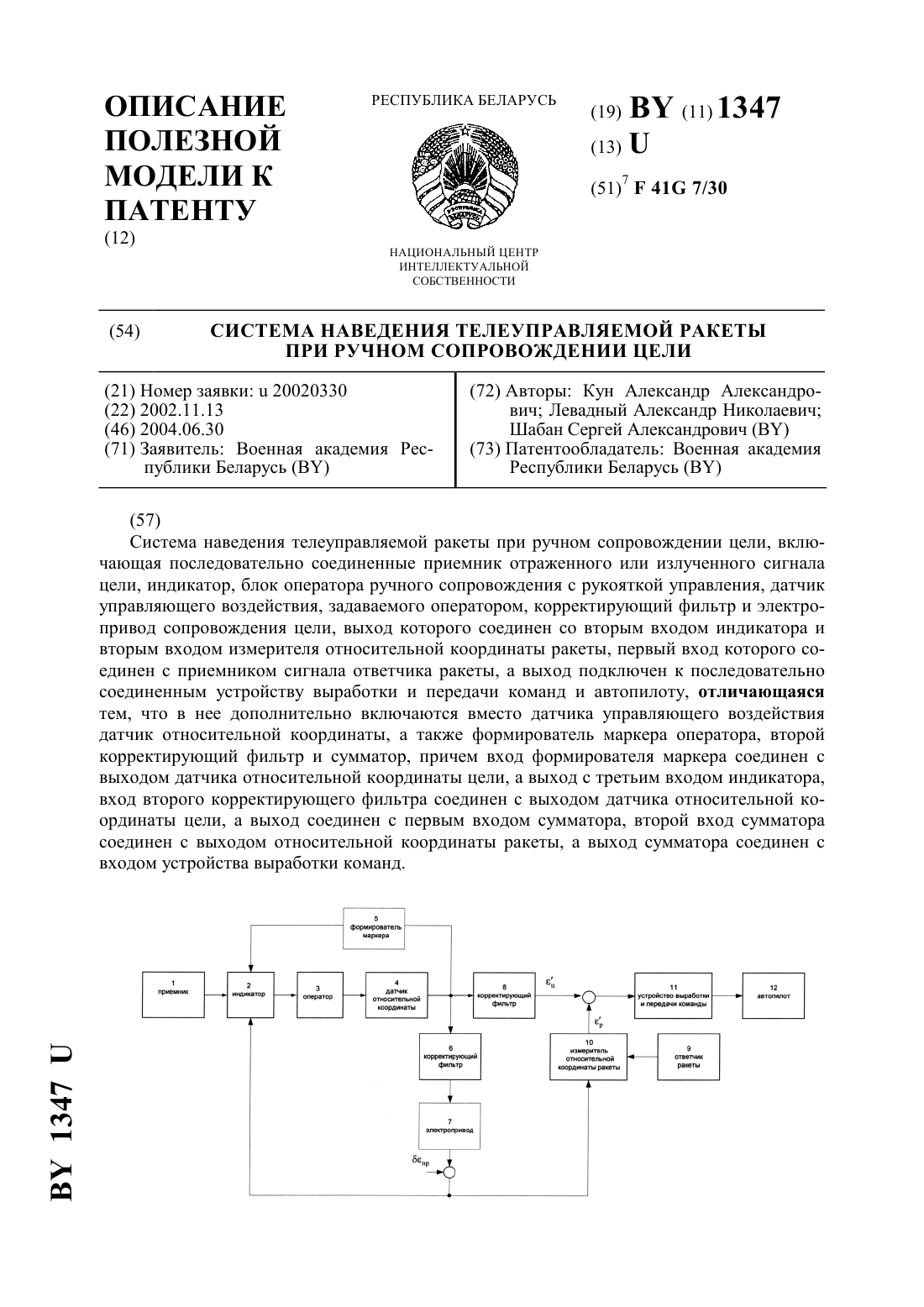
...был отмечен выше ухудшение точности наведения за счет отработки системой управления возмущений привода сопровождения. Кроме того, в комплексе предусмотрен режим наведения ракеты при автоматическом сопровождении цели (АС) с радиолокационным каналом наблюдения. При постановке помех, как правило, необходимо переключаться на . Так как структурные схемы систем наведения при АС иразличны, возникает значительный переходной процесс, что также...
Измерительный комплекс времени выполнения боевого развертывания
Номер патента: U 2421
Опубликовано: 28.02.2006
Авторы: Немилов Вячеслав Викторович, Швед Андрей Аркадьевич
МПК: G04F 13/00
Метки: комплекс, развертывания, измерительный, выполнения, времени, боевого
Текст:
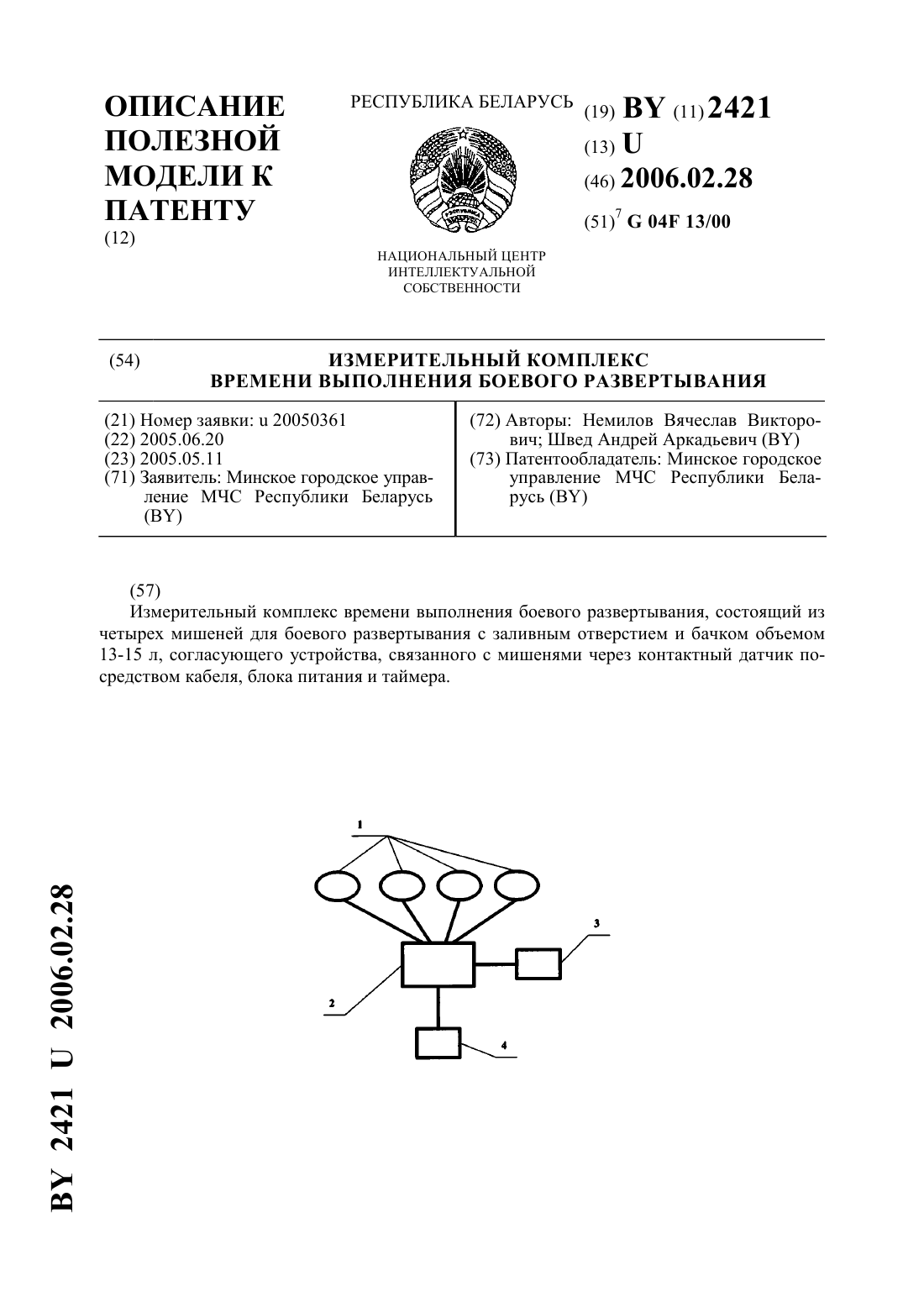
...фирмы, отображающего время выполнения упражнения. Заявляемая полезная модель поясняется чертежом-схемой. Измерительный комплекс времени выполнения боевого развертывания состоит из четырех мишеней для боевого развертывания 1 с заливным отверстием и бачком объемом 13-15 л, обеспечивающих участие одновременно четырех участников соревнований,согласующего устройства 2, регистрирующего заполнение мишеней водой на 10 л, выделяющего по одному...
Комплекс для механической очистки сточных вод
Номер патента: 5172
Опубликовано: 30.06.2003
Автор: Панасюк Анатолий Иванович
МПК: E03F 5/14, G05B 19/045
Метки: сточных, вод, комплекс, очистки, механической
Текст:
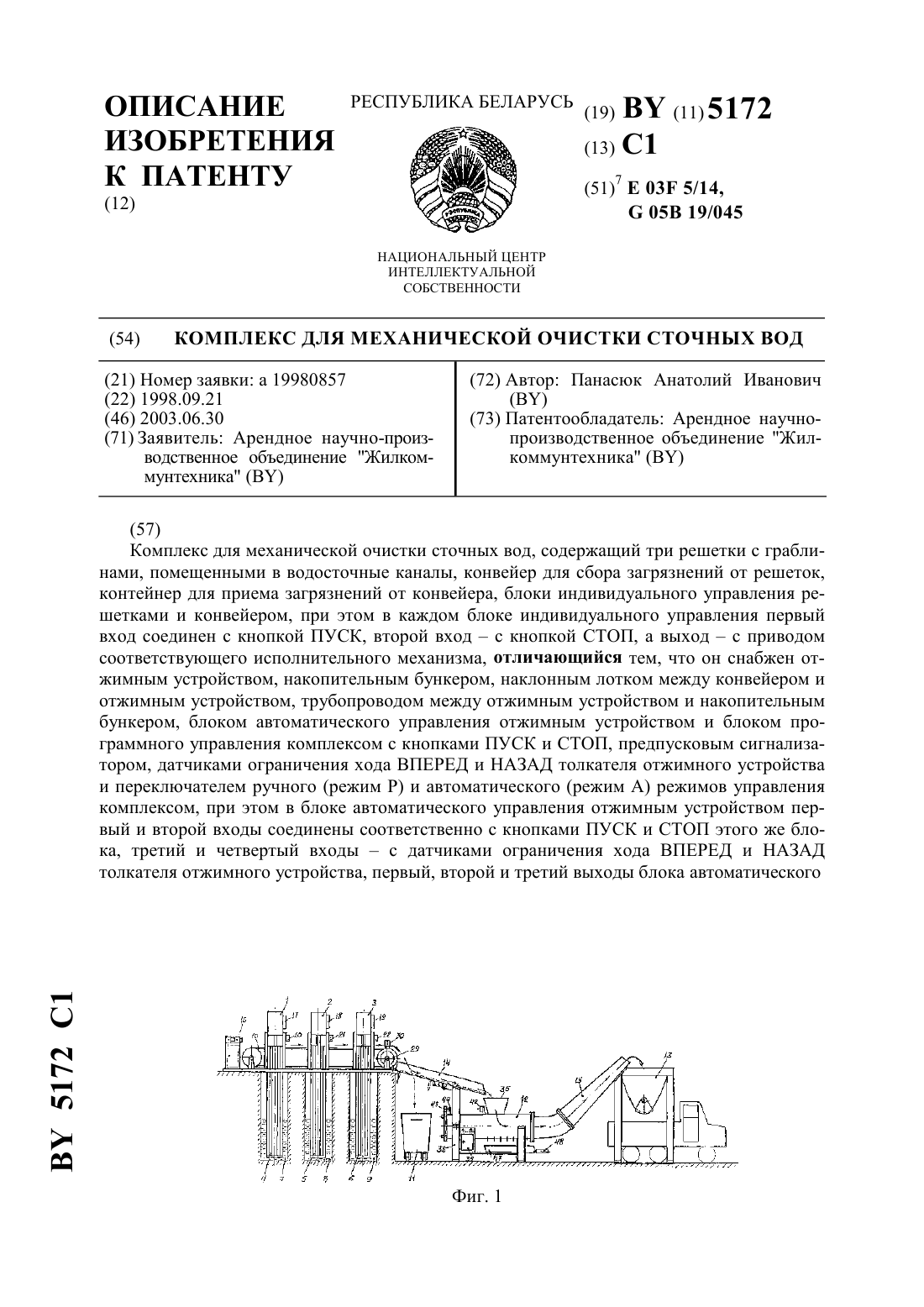
...имеют дополнительные третьи входы, в блоках 20, 21, 22, 30 первые и вторые входы соединены с соответствующими кнопками 23 ПУСК-1 и 24 СТОП-1, 25 ПУСК-2 и 26 СТОП-2, 27 ПУСК-3 и 28 СТОП-3, 31 ПУСК-4 и 32 СТОП-4, а выходыс соответствующими приводами 17, 18, 19, 29 в блоке 39 первый и второй входы соединены с соответствующими кнопками 40 ПУСК-5 и 41 СТОП-5, третий и четвертый входы - с датчиками ограничения хода толкателя соответственно 42...
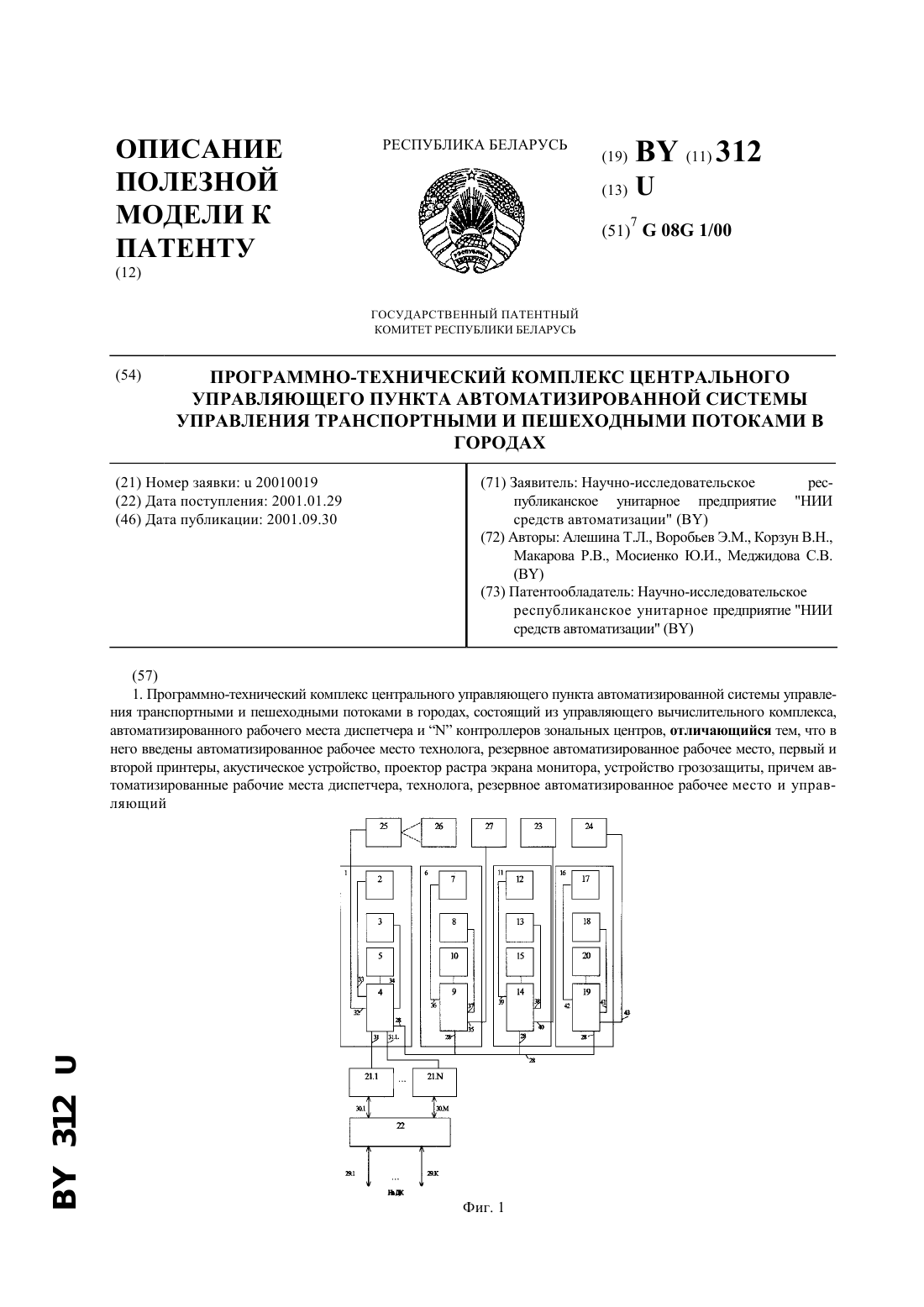
Программно-технический комплекс центрального управляющего пункта автоматизированной системы управления транспортными и пешеходными потоками в городах
Номер патента: U 312
Опубликовано: 30.09.2001
Авторы: Корзун Валерий Николаевич, Макарова Раиса Васильевна, Мосиенко Юрий Иванович, Алешина Тамара Леонидовна, Воробьев Эдуард Михайлович, Меджидова Светлана Викторовна
МПК: G08G 1/00
Метки: комплекс, автоматизированной, пункта, транспортными, потоками, центрального, управляющего, системы, программно-технический, городах, пешеходными, управления
Текст:
...системного блока 14 и встраиваемого пакета программ 15 автоматизированного рабочего места резервного 16 на базе ПЭВМ в составе цветного монитора 17, клавиатуры 18, системного блока 19 и встраиваемого пакета программ 20 контроллеров зонального центра (КЗЦ) 21.121. устройства грозозащиты 22 принтеров 23 и 24 проектора 25 экрана 26 акустического устройства 27 локальной вычислительной сети 28. При этом выходы (входы) устройства грозозащиты 22...
Предыдущий патент: Кристаллизатор для непрерывного литья плоских слитков
Следующий патент: Объектив
Случайный патент: Закалочное устройство для быстрого охлаждения тонкостенных заготовок