Способ внесения удобрений, ядохимикатов и семян
Текст
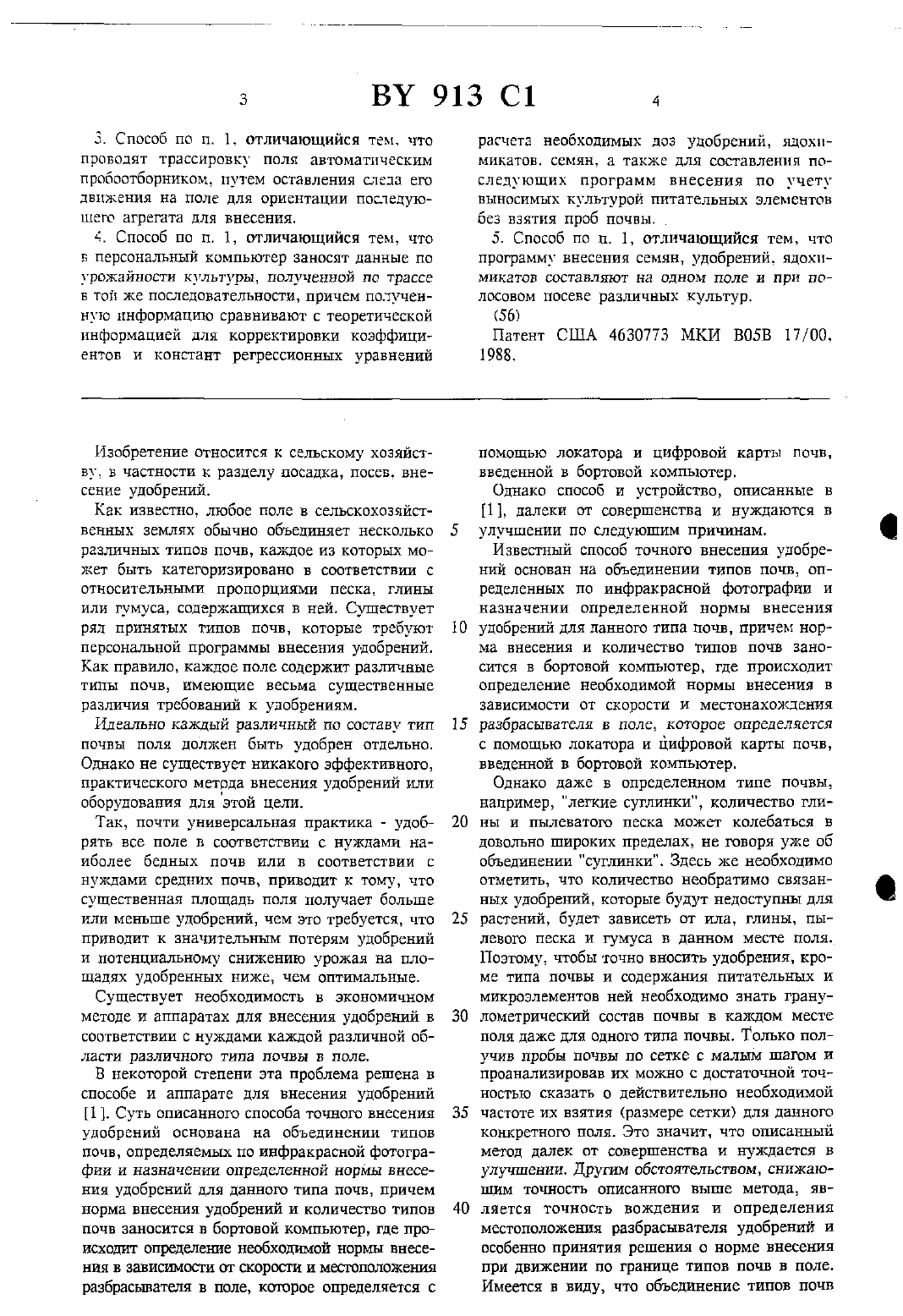
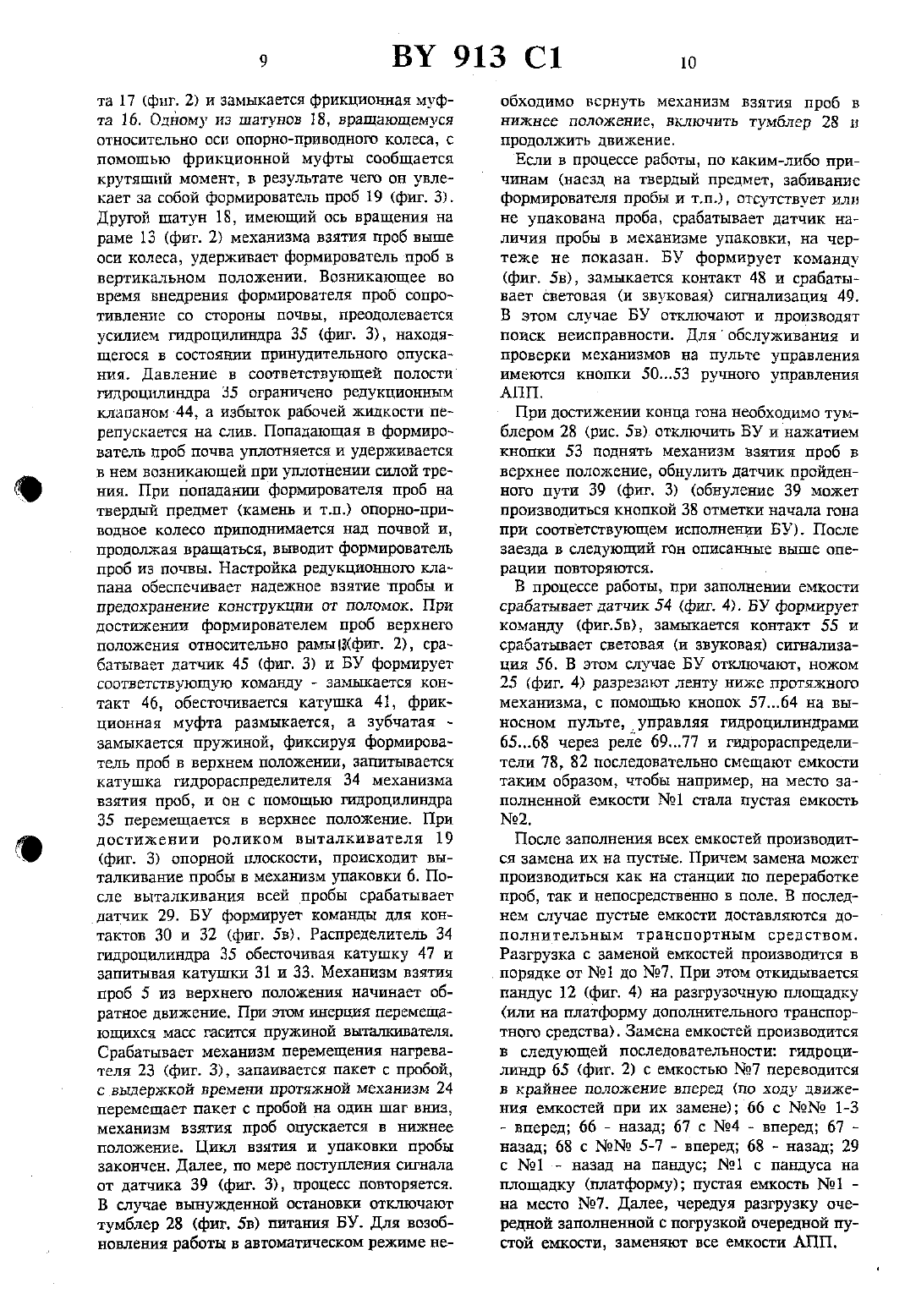
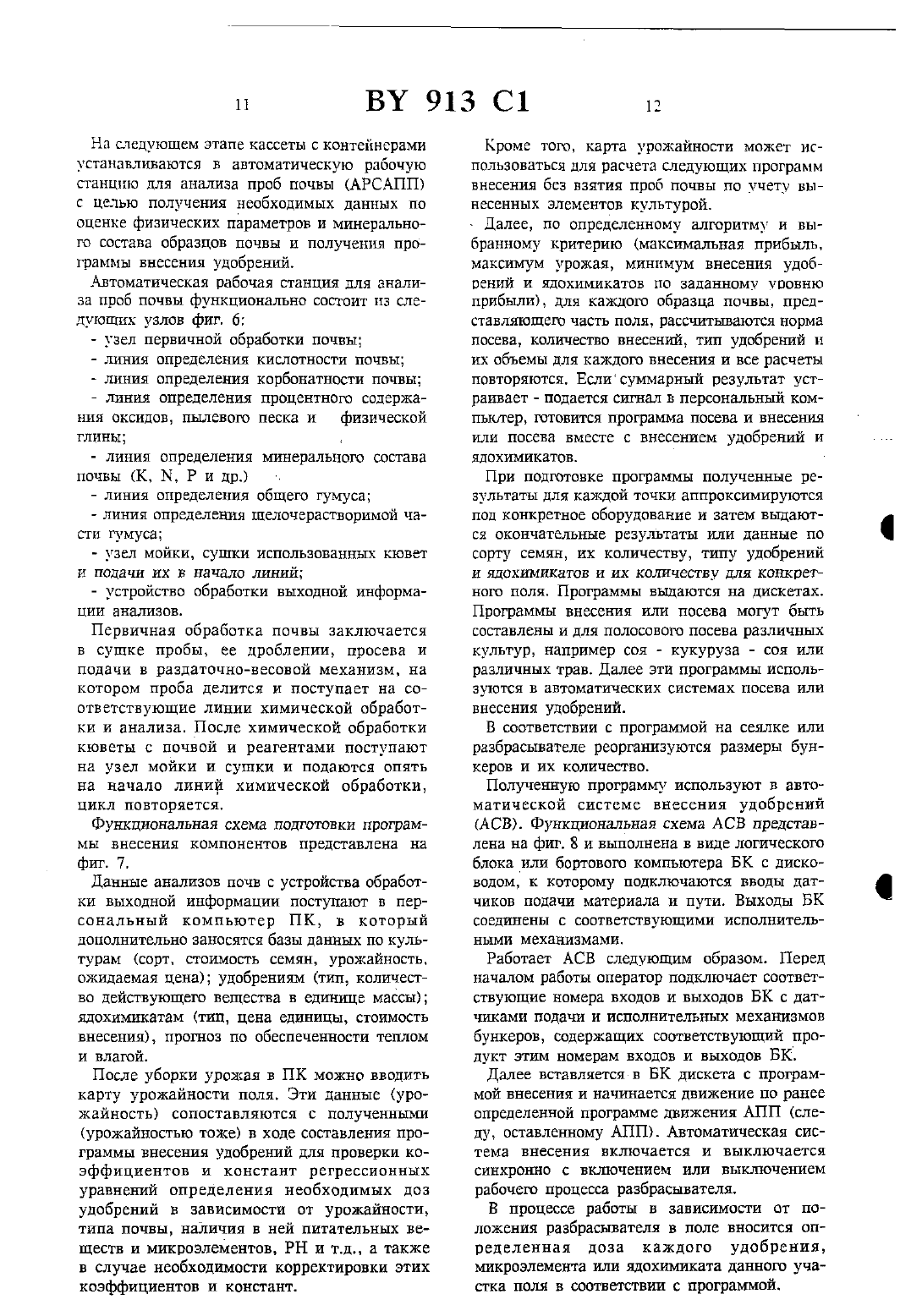
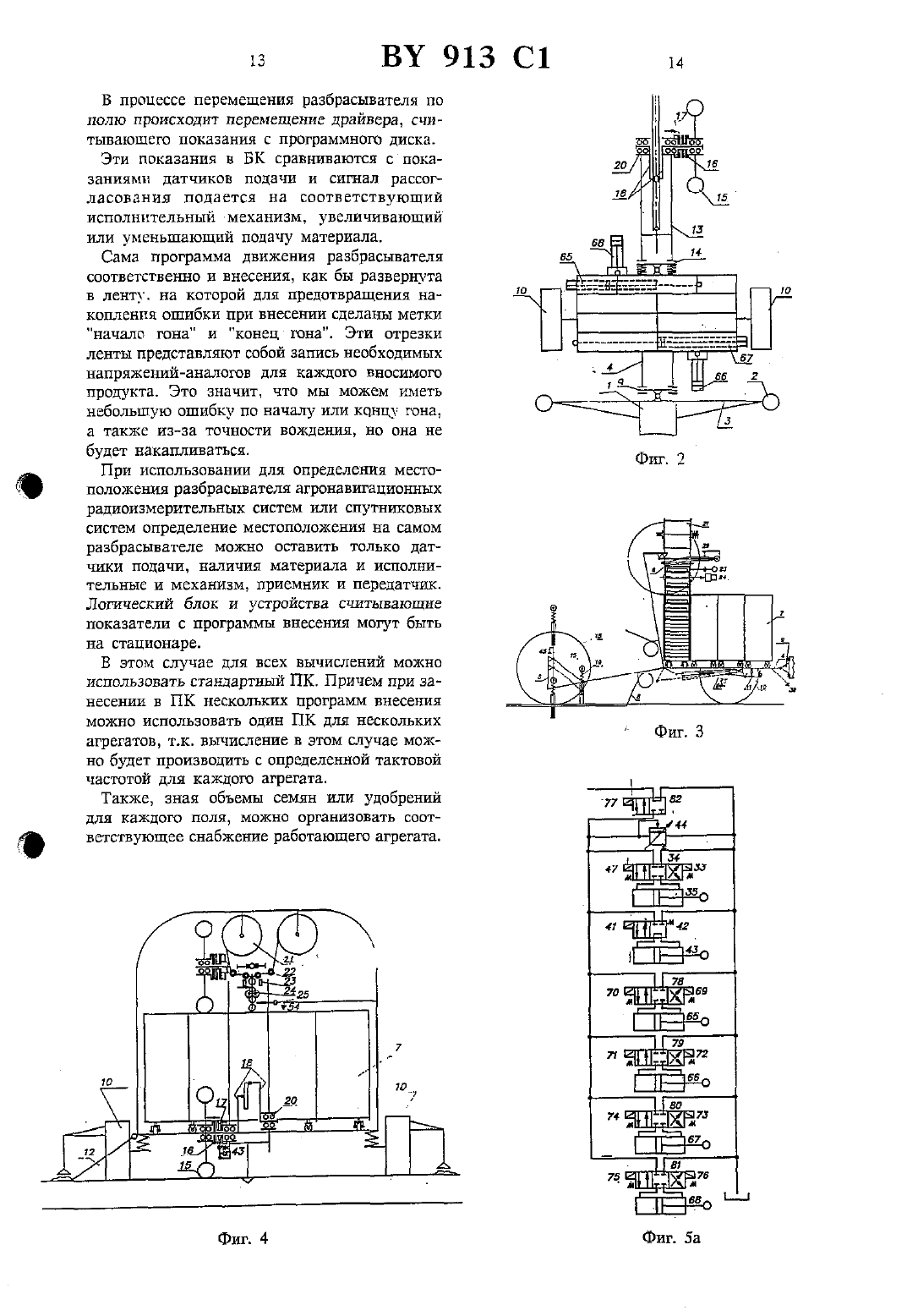
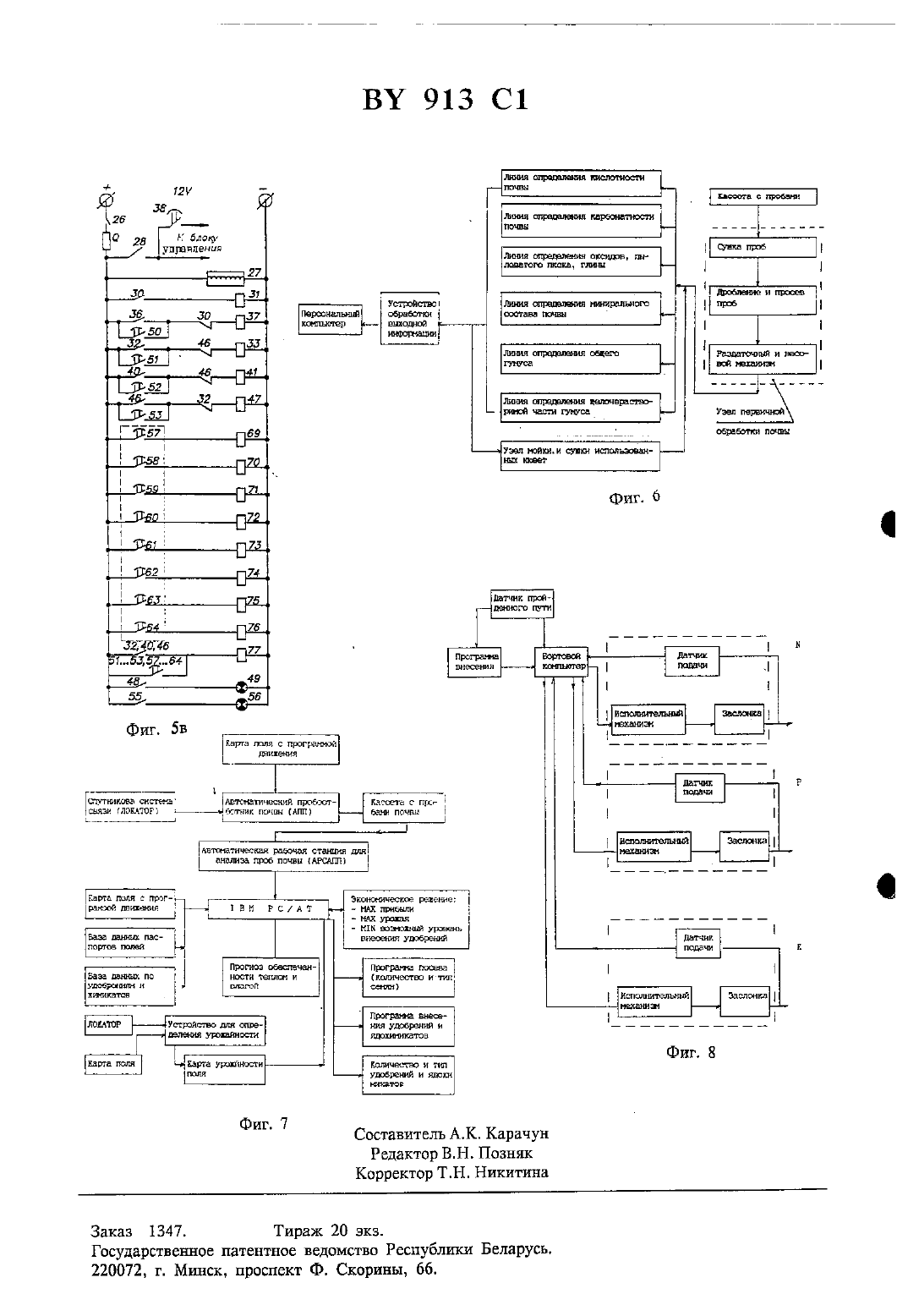
З. Способ по п. 1. отличающийся тем. что Проводят трассировку поля автоматическим пробоотборников/т, путем оставления следа его движения на поле для ориентации последующего агрегата для внесения.4. Способ по п. 1, отличающийся тем, что в персональный компьютер заносят данные по урожайности культуры, полученной по трассе в той же последовательности, причем полученную информацию сравнивают с теоретической информацией для корректировки коэффициентов и констант регрессионных уравненийКак известно, любое поле в сельскохозяйственных землях обычно объединяет несколько различных типов почв, каждое из которых может быть катеторизировано в соответствии с относительными пропорциями песка, глины или гумуса, содержащихся в ней. Существует ряд принятых типов почв, которые требуют персональной программы внесения удобрений. Как правило, каждое поле содержит различные типы почв, имеющие весьма существенные различия требований к удобрениям.Идеально каждый различный по составу тип почвы поля должен быть удобрен отдельно. Однако не существует никакого эффективного,практического метода внесения удобрений или оборудования для этой цели.Так, почти универсальная практика - удобрять все поле в соответствии с нуждами наиболее бедных почв или в соответствии с нуждами средних почв, приводит к тому, что существенная площадь поля получает больше или меньше удобрений, чем это требуется, что приводит к значительным потерям удобрений и потенциальному снижению урожая на площадях удобренных ниже, чем оптимальные.Существует необходимость в экономичном методе и аппаратах для внесения удобрений в соответствии с нуждами каждой различной области различного типа почвы в поле.В некоторой степени эта проблема решена в способе и аппарате для внесения удобрений 1 1. Суть описанного способа точного внесения удобрений основана на объединении типов почв, определяемых по инфракрасной фотографии и назначении определенной нормы внесения удобрений для данного типа почв, причем норма внесения удобрений и количество типов почв заносится в бортовой компьютер, где происходит определение необходимой нормы внесения в зависимости от скорости и местоположения разбрасыватели в поле, которое определяется срасчета необходимых доз удобрений, ядохимикатов. семян, а также для составления последующих программ внесения по учету выносимых культурой Питательных элементов без взятия проб почвы.5. Способ по п. 1, отличающийся тем, что программу внесения севтян, удобрений, ядохимикатов составляют на одном поле и при полосовом посеве различных культур.Однако способ и устройство, описанные в 1, далеки от совершенства и нуждаются в улучшении по следующим причинам.Известный способ точного внесения удобрений основан на объединении типов почв, определенных по инфракрасной фотографии и назначении определенной нормы внесения удобрений для данного типа почв, причем норма внесения и количество типов почв заносится в бортовой компьютер, где происходит определение необходимой нормы внесения в зависимости от скорости и местонахождения разбрасыватели в поле, которое определяется с помощью локатора и цифровой карты почв,введенной в бортовой компьютер.Однако даже в определенном типе почвы,например, легкие суглинки, количество глины и пылеватого песка может колебаться в довольно Широких пределах, не говоря уже об объединении суглинки. Здесь же необходимо отметить, что количество необратимо связанных удобрений, которые будут недоступны для растений, будет зависеть от ила, глины, пылевого песка и гумуса в данном месте поля. Поэтому, чтобы точно вносить удобрения, кроме типа почвы и содержания питательных и микроэлементов ней необходимо знать гранулометрический состав почвы в каждом месте поля даже для одного типа почвы. Только получив пробы почвы по сетке с малым шагом и проанализировав их можно с достаточной точностью сказать о действительно необходимой частоте их взятия (размере сетки) для данного конкретного поля. Это значит, что описанный метод далек от совершенства и нуждается в улучшении. Другим обстоятельством, снижающим точность описанного выше метода, является точность вождения и определения местоположения разбрасывателя удобрений и особенно принятия решения о норме внесения при движении по границе типов почв в поле. Имеется в виду, что объединение типов почвприводит к увеличению разницы в нормах внесения для соседних типов, что будет особенно СКНЗЫВЗТЬСЯ ПрН ВОЖДЕНИИ ШИРОКОЗЗХБЗТНЫХ агрегатов на границе типов.Указанные недостатки устранены в предлагаемом способе внесения удобрений и посева сельскохозяйственных культур.Задачей данного изобретения является повышение точности и экономической эффективности внесения удобрений, ядохимикатов и посева семян.Поставленная задача достигается тем, что в способе внесения удобрений, ядохимикатов и семян путем определения местоположения на карте поля разбрасывающего транспортного средства, дозы внесения-компонентов удобрений и непосредственное их внесение по программе, которую составляют независимо от вносящего агрегата путем трассировки карты по схеме его движения, последующего взятия автоматизированным пробоотборником по ходу этой трассы проб почвы через заданные расстояния, их упаковки в ленту и маркировки,затем анализа на автоматизированной рабочей станции физико-механических параметров взятых проб, определение по имеющимся зависимостям и выбранному критерию необходимой дозы внесения компонентов для каждой пробы, причем статистически обработанную информацию по дозам внесения заносят в программу с учетом предыдущей трассировки, а сама программа развернута в ленту, на которой выполнены метки начала каждого гона, и при определении доз учитывают количество питательных веществ, необратимо связанных с почвой. Кроме того, трассировку поля ведут автоматизированным пробоотборником, путем оставления следа его движения по нему вносящего агрегата, а в персональный компьютер заносят данные по урожайности культуры,полученной по трассе в той же последовательности, причем полученную информацию сравнивают с теоретической информацией для корректировки коэффициентов и констант регрессионных уравнений расчета необходимых доз удобрений, ядохимикатов, семян, а также для составления последующих программ внесений по учету выносимых культурой питательных элементов без взятия проб почвы.Сопоставительный анализ заявляемого решения с прототипом показывает, что заявляемый способ отличается от известного тем, что программу внесения удобрений, семян или их смесей составляют независимо от вносящего агрегата путем трассировки карты поля по схеме его движения, последующего взятия автоматизированным пробоотборником по ходу этой трассы проб почвы через заданные расстояния, их упаковки в пластиковую ленту и маркировки, затем анализа на автоматизиро 10ванной рабочей станции физико-механических параметров взятых проб, определению затем по имеющимся зависимостям и выбранному критерию необходимой дозы внесения компонентов для каждой пробы, причем статистически обработанную информацию по дозам внесения заносят в программу, с учетом предыдущей трассировки и при определении лоз учитывают количество питательных веществ,необратимо связанных с почвой.Выполнение трассировки поля автоматизированным пробоотборником, путем оставления СЛСДВ СТО ДВИЖЕНИЯ На ПОЛЕ ДЛЯ ориентации последующего агрегата, обеспечивает повышение точности и согласования внесения в соответствие с взятыми компонентами. Занесение в персональный компьютер данных по урожайности культуры, полученной по трассе в той же последовательности и сравнение с теоретической информацией для корректировки коэффициентов и констант регрессионных уравнеъшй расчета доз и составление программ внесения по учету выносимых культурой питательных элементов обеспечивает повышение точности расчета программы.Составление программы внесения компонентов на одном поле при полосовом посеве различных культур позволяет вносить удобрения без переналадки агрегатов.Способ поясняется схемами и чертежамифиг. 1 - схема взятия проб почвыфиг. 2 - кинематическая схема автоматического пробоотборншса почвы (АПП) - вид сверХУфиг. 6 - функциональная схема автоматической рабочей станции для анализа проб почвыфиг. 7 - функциональная схема подготовки ПРОГРНММЫ ВНЕСЕНИЯ КОМПОНЕНТОВфиг. 8 - функциональная схема автоматической системы внесения удобрений (АСВ).Предлагаемый способ осуществляют следующим образом в несколько этапов.На первом этапе по существующей карте поля, технологии посева, ширине. захвата посевного агрегата и машины для внесения удобрений выбирают направления движения автоматического пробоотборника почвы(АПП), т.е. независимо от разбрасывателя удобрений трассируют карту поля по схеме движения разбрасывателя удобрений (см. фиг. 1). Затем в АПП заносят данные по размеру решетки для взятия проб и глубине взяТИЯ.в - ширина захвата агрегата для внесения удобрений.для определения размеров решетки могут быть использованы маркер и датчик дистанции и другие навигационные средства.АПП - прицепная машина, предназначенная для взятия проб почвы из пахотного горизонта на ходу в автоматическом режиме. АПП агрегатируетсн с мобильным средством 1 (фиг. 2) с пенным маркером 2 и штангами 3, имеющим системы гидро и электропитания.АПП состоит из одноосной прицепной тележки 4 (фиг. 3), механизма взятия проб 5, механизма упаковки проб б, емкостей для накопления упакованных проб 7, следоуказателя 8, системы управления и сигнализации.Прицепная тележка 4 представляет собой рамную конструкцию (фиг. 2) с прицепным устройством 9, с двумя степенями свободы, на пневматических шинах 10, с независимой подвеской 11 (фиг. 3). На тележке имеется откидной пандус 12 (фит. 4) для погрузки-разгрузки емкостей.Механизм взятия проб 5 состоит из рамы 13(фиг. 2) с шарнирным, с двумя степенями свободы, креплением 14 к прицепной тележке 4, опорно-приводного колеса 15, фрикционной 16 и зубчатой 17 муфт, шатунов 18, трубчатого формирователя проб (фиг, 3) с подпружиненным выталкивателем 19 И подшипниковых опор 20 (фиг.2).Механизм упаковки проб 6 предназначен для упаковки в пластиковыепакеты каждой отдельной пробы в порядке поступления и отметки начала гона. Механизм состоит из двух катушек 21 (фиг. 4) с пластиковыми лентами,направляющих роликов 22, механизма запайки пакетов 23, протяжного механизма 24 и ножа 25 для отрезания ленты при замене емкостей.АПП имеет 7 металлических емкостей для накопления упакованных проб 7 на триста проб каждая. Емкости пронумерованы от Ы 91 до На и устанавливаются на тележке в порядке возрастания нумерации, причем первой заполняется емкость МЕЧ. Емкости имеют возможность перемещения на колесах со смещенной осью по тележке в двух направлениях,последовательно одна за другой.Следоуказатель 8 представляет собой пластинчатую пружину, прикрепленную к раме механизма взятия проб 5 и предназначен ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ ПОЧВЫ ОТ КЗМНСЙ,растительных остатков и образования заметного по почве следа вдоль продольной оси АПП. Для этой же цели можно использовать бак с насосом на мобильном средстве 1 и форсунку на АПП для нанесения цветной полосы по месту взятия проб почвы (на чертеже не показано).Система управления предназначена для изменения положения и состояния механизмов АПП в соответствии с управляющими командами блока управления (на черетеже не показава).АПП осуществляет взятие проб при движении по полю с заданным ( но не менее 15 м) интервалом и производит упаковку проб в пластиковые пакеты, образуя при этом ленту 113 пакетов, длина которой определяется размером одной емкости (примерно 30 м или 300 проб). Начало каждого прохода (гона) вдоль поля отмечается запайкой в ленте трех пустых пакетов. Движение вдоль первого гона осуществляется согласно схемы движения на карте,после каждого прохода АПП на поле остается след от следоуказателя 8 (фиг. 3), расположенного на продольной оси АПП, предназначенный для последующей ориентации машины для внесения удобрений. Пенный маркер настраивается на ширину, равную или кратную ширине захвата этой машины.АПП устанавливается в начало первого гона. тумблером 26 (фиг. 5 в) на пульте управления включается электропитание АПП. При этом начинается разогрев нагревательного элемента 27. После его нагрева тумблером 28 включается питание блока управления БУ. При этом срабатывает датчан 29 блока управления (фит. 3),в БУ формируются соответствующие команды,замыкается контакт 30 (фиг. 5 в), запитывается электромагнит 31 механизма перемещения нагревателя 23 и производится запайка пустого пакета. Замыкается контакт 32, запитывается катушка 33 гидрораспределителей 34 и гидроцилиндром 35 и производится опускание механизма взятия проб 5 (фиг. З) в нижнее положение, с выдержкой времени на напайку пакета, В БУ формируется команда - замыкается контакт 36 через реле 37, запитывается электродвигатель протяжного механизма 24 и производится перемещение запаянного пакета вниз на величину, равную его длине. Оператор нажимает дважды, с выдержкой времени,кнопку 38. При этом в БУ формируются команды для контактов 35, 30, производится запайка и протягивание еще двух пустых пакетов. Таким образом обработаны три пустых пакета, характеризующих начало гона. При соответствующем исполнении БУ возможен вариант, когда три пустых пакета образуются при однократном нажатии кнопки 38.Агрегат начал движение вдоль гона. После прохождения заданного заранее отрезка поля датчик пройденного пути 39 (фиг. 3) подает сигнал в БУ, гле формируется команда для контакта 40 (фиг. 5 в). При этом замыкается контакт 40, запитывается катушка 41 гидрораспределителя 42, происходит перемещение гидроцилиндра 43, размыкается зубчатая муф 9 ВТ 913 С 1 10та 17 (фпг. 2) и замыкается фрикционная муфта 16. Одному из шатунов 18, вращающемуся относительно оси опорно-приводного колеса, с помощью фрикционной муфты сообщается крутящий момент, в результате чего он увлекает за собой Формирователь проб 19 (фиг. 3). Другой шатун 18, имеющий ось вращения на раме 13 (фиг. 2) механизма взятия проб выше оси колеса, удерживает формирователь проб в вертикальном положении. Возникающее во время внедрения формирователя проб сопротивление со стороны почвы, преодолевается усилием гидроцилиндра 35 (фиг. 3), находящегося в состоянии принудительного опускания. Давление в соответствующей полости гидроцилиндра 35 ограничено рБДУКЦИОННЫМ клапаном 144, а избыток рабочей жидкости перепускается на слив. попадающая в формирователь проб почва уплотняется и удерживается в нем возникающей при уплотнении силой трения. При попадании формирователя проб на твердый предмет (камень и т.п.) опорно-приводное колесо приподнимается над почвой и,продолжая вращаться, выводит формирователь проб из почвы. Настройка редукционного клапана обеспечивает надежное взятие пробы и предохранение конструкции от поломок. При достижении формирователем проб верхнего положения относительно рамЫЗ(фиг. 2), срабатывает датчик 45 (фиг. 3) и БУ формирует соответствующую команду замыкается контакт 46, Чтбесточивается катушка 41, фрикционная муфта размыкается, а зубчатая замыкается пружиной, фиксируя формирователь проб в верхнем положении, запитывается катушка гидрораспределителя 34 механизма взятия проб, и он с помощью гидроцилиндра 35 перемещается в верхнее положение. При достижении роликом выталкивателя 19(фиг. 3) опорной плоскости, происходит выталкивание пробы в механизм упаковки б. После выталкивания всей пробы срабатывает датчик 29. БУ формирует команды для контактов ЗО и 32 (фиг. 5 в). Распределитель 34 гидроцилиндра 35 обесточивая катушку 47 и запитывая катушки 31 и 33. Механизм взятия проб 5 из верхнею положения начинает обратное движение. При этом инерция перемещающихся масс гасится пружштой выташсивателя. Срабатывает механизм перемещения нагреватсля 23 (фиг. 3), запаивается пакет с пробой,с выдержкой времени протяжной механизм 24 перемещает пакет с пробой на один шаг вниз,механизм взятия проб опускается в нижнее положение. Цикл взятия и упаковки пробы закончен. Далее, по мере поступления сигнала от датчика 39 (фиг. 3), процесс повторяется. В случае вынужденной остановки отключают тумблер 28 (фиг. 5 в) питания БУ. Для возобновления работы в автоматическом режиме не обходимо всрнуть механизм взятия проб в нижнее положение, включить тумблер 28 и продолжить движение.Если в процессе работы, по каким-либо причинам (наезд на твердый предмет, забивание формирователя пробы н т.п.), отсутствует или не упакована проба, срабатывает датчик наличия пробы в механизме упаковки, на чертеже не показан. БУ формирует команду(фиг. 5 в), замыкается контакт 48 и срабатывает световая (и звуковая) сигнализация 49. В этом случае БУ отключают и производят поиск неисправности. Дляобслуживания и проверки механизмов на пульте управления имеются кнопки 5053 ручного управления АПППри достижении конца гона необходимо тумблером 28 (рис. 5 в). отключить БУ и нажатием кнопки 53 поднять механизм взятия проб в верхнее положение, обнулить датчик пройденного пути 39 (фиг. 3) (обнуление 39 может производиться кнопкой 38 отметки начала гона при соответствующем исполнении БУ). После заезда в следующий шн описанные выше операции повторяются. .В процессе работы, при заполнении емкости срабатывает датчик 54 (фиг. 4. БУ формирует команду (фипбв), замыкается контакт 55 и срабатывает световая (и звуковая) сигнализация 56. В этом случае БУ отключают, ножом 25 (фиг. 4) разрезают ленту ниже протяжного механизма, с помощью кнопок 5764 на выносном пульте, дуправляя гидроцилиндрами б 568 через реле 6977 и гидрораспределители 78, 82 последовательно смещают емкости таким образом, чтобы например, на место заполненной емкости 1491 стала пустая емкость Ы 92.После заполнения всех емкостей производится замена их на пустые. Причем замена может производиться как на станции по переработке проб, так и непосредственно в поле. В последнем случае пустые емкости доставляются дополнительным транспортным средством. Разгрузка с заменой емкостей производится в(или на платформу дополнительного транспортного средства). Замена емкостей производится в следующей последовательности гидроцилиндр 65 (фиг. 2) с емкостью Не переводится в крайнее положение вперед (по ходу движения емкостей при их замене) 66 с Наш 1-3- вперед 66 - назад 67 с 1194 - вперед 67 назад 68 с Маш 5-7 - вперед 68 - назад 29 с Ы 91 - назад на паидус Ы 91 с пандуса на площадку (платформу) пустая емкость Не на место МЛ. Далее, чередуя разгрузку очередной заполненной с погрузкой очередной пустой емкости, заменяют все емкости АПП.
МПК / Метки
МПК: A01C 21/00, A01C 15/00
Метки: ядохимикатов, семян, способ, внесения, удобрений
Код ссылки
<a href="https://by.patents.su/8-913-sposob-vneseniya-udobrenijj-yadohimikatov-i-semyan.html" rel="bookmark" title="База патентов Беларуси">Способ внесения удобрений, ядохимикатов и семян</a>
Способ уменьшения слеживаемости и пылимости калийных удобрений
Номер патента: 745
Опубликовано: 15.08.1995
Авторы: Варава Мария Михайловна, Аношин Анатолий Иванович, Борода Валентина Трофимовна, Овсеенко Людмила Васильевна, Коршук Эдуард Филиппович, Можейко Фома Фомич, Томчин Лазарь Ильич, Нос Валентина Иосифовна, Старостина Ольга Ивановна, Горбачев Александр Стефанович
МПК: C05D 1/02
Метки: уменьшения, удобрений, пылимости, слеживаемости, способ, калийных
Текст:
...5-11. Раствор вводят и в сочетании с солями высших алифатических аминов при соотношении 1003-0,2 соответственно.Согласно ТУ 113-03-488-84 щелочной сток производства капролактама (ЩСПК) представляет собой негорючую жидкость коричне 10вого цвета без механических примесей, которая при хранении не образует взрывоопасных концентраций, имеет щелочную реакцию - рН раствора 10-13. Массовая доля сухих веществ составляет 25-45, в том числе натриевых...
Упаковка из полимерного материала для ядохимикатов
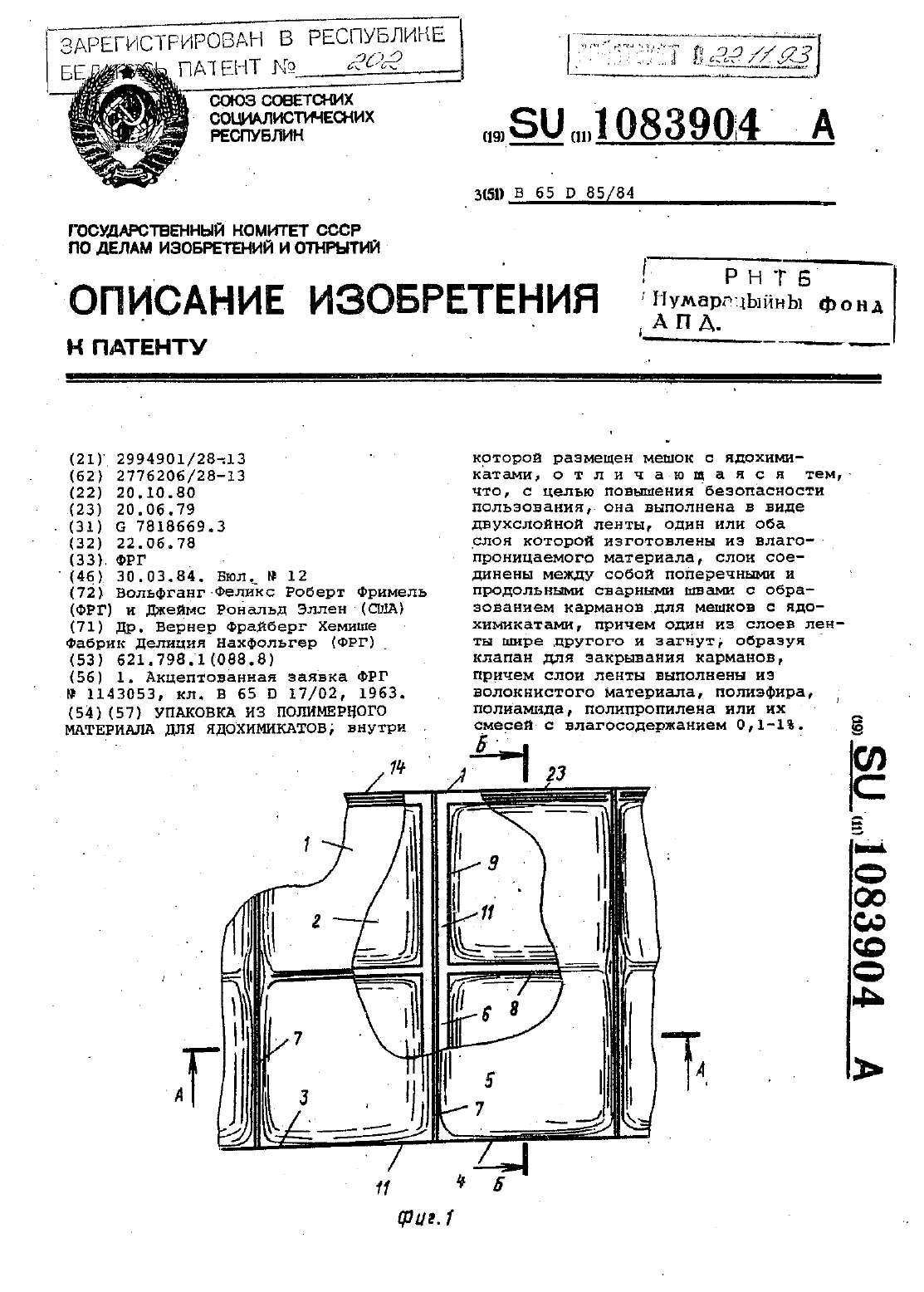
Номер патента: 202
Опубликовано: 30.12.1994
Авторы: Вольфганг Феликс Роберт Фримель, Джеймс Рональд Эллен
МПК: B65D 85/84
Метки: материала, ядохимикатов, полимерного, упаковка
Текст:
...при помощи клеящей ленты 22. Для изготовления упаковки 1 ленту 3 складывают таким образом, что свободная кромка 13 нижнего слоя 6 выступает на свободную кромку 12 верхнего слоя 5. Полоса со стороны закрытой продольной кромки 4 загнута, н сварные швы 7 наносят на равномерном расстоянии друг от друга таким образом, что слои 5 и 6 плотно соединены друг с другом и образуют карманы В. Два предварительно упакованных, заполненных порошком 10 мешка...
Способ гранулирования порошкообразных минеральных удобрений
Номер патента: 403
Опубликовано: 30.03.1995
Авторы: Стрельский Л. В., Ниценко В. И., Сапешко В. В., Максименко Н. С., Турко М. Р., Ларютина Э. А., Смычник А. Д.
МПК: B01J 2/22
Метки: порошкообразных, минеральных, способ, гранулирования, удобрений
Текст:
...3 ЭРМгХаННЧеСК 0 Г 0 Ускорения а 200 таты опытов представлены в таблице. 275 М/С. ПРИКОТ 0 р 0 М обеспечен максиИз таблицы видно, что при измене- 15 МЗПЪНЫЙ ВЫХОД ГРаНУЛНТа- ЭТИ РЗЗУЛЬниц исходных нагрузок (2 в диапазоне таты ПОЗВОЛЯЕТ ОПРЕДЕЛИТЬ ОПТИМЗЛЬ от минимальной 70,7 кг/ч до макси- НУЮ Вентиляцию любой промышленной мальвой 258,1 кг/ч, выход гранулята МЕЛЬНИЦЫ С ДРУГОЙ ЧИСТОТОЙ вращения составлял, в среднем, 66,62 и выход РЗОЧИХ...
Композиция для дезинфекции семян
Номер патента: 599
Опубликовано: 30.06.1995
Автор: Хиротака Такано
МПК: A01C 1/06
Метки: семян, дезинфекции, композиция
Текст:
...диоксида кремния 49В примерег 1 представлен вариантномпозции для обеззараживания семян. который содержит . соединение А иуксуснокиспую соль соединения В в массо-Норин М 61), Инокулированных и заражен ных Ризагтот шпане. покрыты путем напы пения предписанным КОЛИЧЕСТВО смачивающегося порошка. дезинфицирующего семена композиции. полученной по примерам 3 9 и Н. После этого их сеют в горном районе и там культивируют. Спустя один...
Способ выращивания картофеля
Номер патента: 54
Опубликовано: 30.09.1994
Автор: Иващенко Алексей Иванович
МПК: A01C 21/00
Метки: выращивания, способ, картофеля
Текст:
...и хлористого калия внос-или вразброс под препосевную культивацию с помощью разр брасывателя минеральных удобрений РМТ-4. а фосфорные в виде гранулированного суперфосфата - локально в гребни при посадке с помощью картофелепосадочнои машины КСМ-4. . Урожайность картофеля составила 388 ц/га, качество клубней было хорошее. В них содержалось сухих веществ 272. в пересчете на абсолютно сухое вещество. -. крахмал 22,3 азот 1.35 фосфор 0,53 калий...
Предыдущий патент: Способ получения циклогексанона
Следующий патент: Жилое здание
Случайный патент: Устройство для перегрузки сыпучих материалов с технологического оборудования на ленточный конвейер