Двигательно-движительный комплекс ВИГ-4
Текст
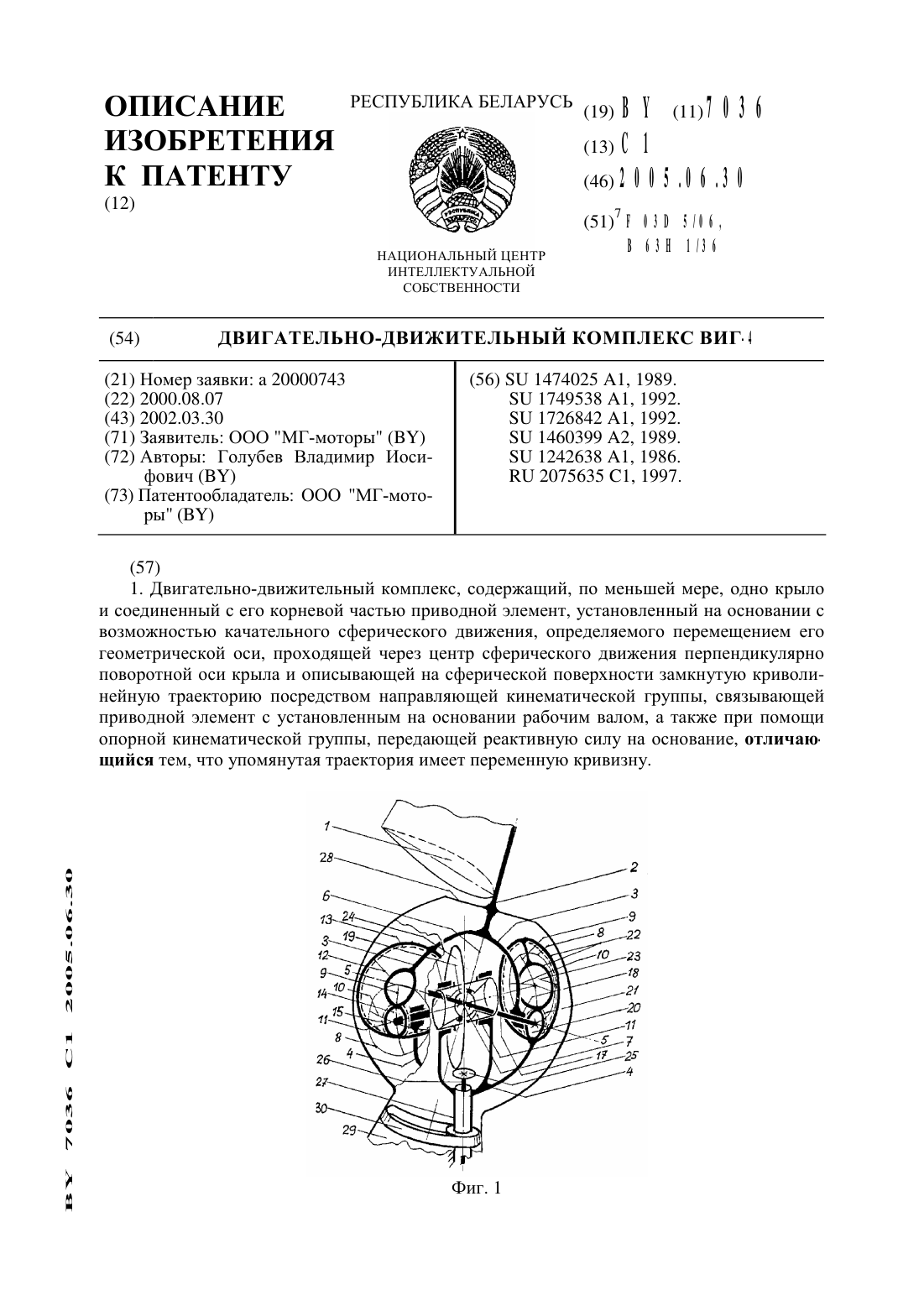
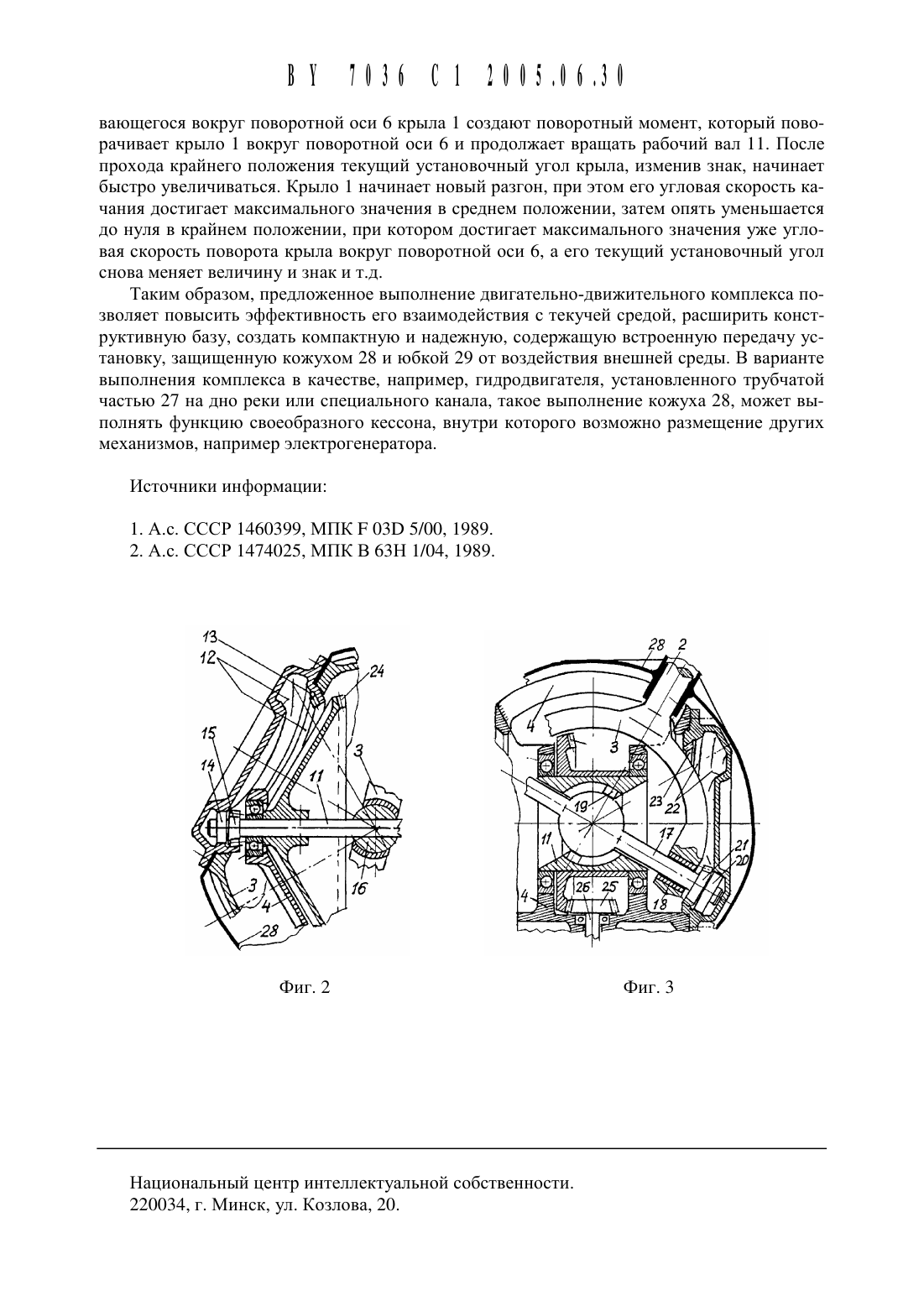
2. Комплекс по п. 1, отличающийся тем, что траектория имеет форму эллипса, при этом его большая ось расположена в плоскости качания крыла И в 1,2-1,5 раза больше его малой оси.3. Комплекс по п. 1, отличающийся тем, что траектория имеет форму эллипса, при этом его малая ось расположена в плоскости качания крыла и в 1,2-1,5 раза меньше его большой оси.4. Комплекс по п. 1, отличающийся тем, что траектория имеет форму овала, состоящего из двух равных пар участков меньшей кривизны и двух равных пар участков большей кривизны, при этом ось овала, проходящая через середины участков меньшей кривизнь 1, расположена в плоскости качания крыла.5. Комплекс по п. 1, отличающийся тем, что траектория имеет форму овала, состоящего из двух неравных пар участков меньшей кривизны и двух равных пар участков большей кривизны, при этом его большая ось расположена в плоскости качания крыла и в 1,21,5 раза больше его малой оси.6. Комплекс по любому из пп. 1-5, отличающийся тем, что направляющая кинематическая группа выполнена в виде установленных на приводном элементе диаметрально противоположно направляющих, соответствующих принятой траектории, и эквидистантнь 1 х им зубчатых колес, обкатывающихся, соответственно, по установленным на концах рабочего вала роликам и шестерням, при этом приводной элемент дополнительно соединен центрирующим сферическим шарниром с основанием.7. Комплекс по любому из пп. 1-5, отличающийся тем, что направляющая кинематическая группа выполнена в виде размещенного в полом рабочем валу и шарнирно соединенного с приводным элементом промежуточного вала, связанного в центре сферического движения с рабочим валом при помощи передающего под переменным углом крутящий момент сферического шарнира, при этом промежуточный вал снабжен на концах роликами и шестернями, обкатывающимися, соответственно, по установленным на основании диаметрально противоположно направляющим, соответствующим принятой траектории, и по эквидистантным им зубчатым колесам.8. Комплекс по п. 6 или 7, отличающийся тем, что каждая направляющая выполнена в виде желоба.9. Комплекс по п. 6 или 7, отличающийся тем, что зубчатые колеса выполнены с внутренним зацеплением.10. Комплекс по п. 6 или 7, отличающийся тем, что зубчатые колеса выполнены с внешним зацеплением.11. Комплекс по п. 1, отличающийся тем, что основание снабжено трубчатой частью,а рабочий вал снабжен установленным на нем в средней части зубчатым коническим колесом, взаимодействующим с конической шестерней, расположенной на валу, проходящем внутри трубчатой части основания.12. Комплекс по любому из пп. 1-11, отличающийся тем, что опорная кинематическая группа выполнена в виде общего кожуха, закрепленного на приводном элементе и снабженного юбкой, охватывающей трубчатую часть основания, при этом в юбке размещена направляющая, взаимодействующая с ползуном, выполненным в виде катка, установленного на трубчатой части основания.Изобретение относиться к крыльевым устройствам нестационарного взаимодействия с текучей средой, в частности к двигательно-движительным комплексам типа машущее крыло.Известно устройство 1 (ветродвигатель), содержащий крыло (лопасть) и соединенный с его корневой частью приводной элемент (т.е. конечная подвижная деталь привода крыла),установленный на основании с возможностью качания в одной плоскости. Приводнойэлемент выполнен, в данном случае, в виде платформы, щарнирно установленной на основание при помощи цапфы. Движение приводного элемента может быть определено траекторией, описываемой геометрической осью приводного элемента, проходящей через центр качания крыла перпендикулярно его поворотной оси (оси поворота при изменении установочного угла крыла). Эта траектория имеет вид дуги, размещенной в плоскости качания крыла. Направляющая кинематическая группа, обеспечивающая качание и поворот крыла, выполнена в виде щатуна, щарнирно связывающего приводной элемент с кривощипом рабочего вала, в свою очередь связанного отдельным кривощипом, рычагами и конической зубчатой парой с корневой частью крыла, установленной с возможностью поворота во втулке платформы крыла при прохождении крайних положений. Опорная кинематическую группа, связывающая приводной элемент (платформу) с основанием и передающая на основание реактивную силу взаимодействия крыла с текучей средой, содержит два щарнира соединение корневой части крыла с втулкой платформы и соединение платформы при помощи цапфы с основанием.Известное устройство характеризуется качанием крыла в одной плоскости, что приводит к росту инерционных сил, действующих на звенья кинематических групп в моменты остановки крыла в его положениях, и, соответственно, к росту вибраций и потерь. В известном устройстве зависимость между углом поворота крыла (установочного угла) и углом качания может регулироваться количественно, оставаясь неизменной по форме траектории геометрической оси приводного элемента. Это приводит к относительно малой величине оптимального угла качания крыла в области его среднего положения, соответствующего оптимальному значению установочного угла, т.е. наиболее эффективному взаимодействию крыла с текучей средой. Для повыщения общей эффективности работы устройства,при заданном из конструктивных соображений угле качания, необходимо увеличивать оптимальный угла качания крыла, что невозможно в данном техническом рещении. Дополнительно можно отметить, что для устройств с качающимся крылом характерна относительно малая частота качания крыла и, соответственно, малая частота вращения рабочего вала. При соединении такого устройства с внещней системой (двигателем, генератором) в больщинстве случаев необходимо наличие внещних (т.е. не входящих в само устройство) передач. Указанное обстоятельство существенно ухудшает потребительские свойства устройства, так как увеличиваются габариты и стоимость всей системы (в данном случае ветродвигатель - генератор). К томуже высокая знакопеременная нагрузка щарниров опорной кинематической группы (особенно в соединении корневой части крыла с втулкой платформы, где действует больщой изгибающий момент) снижает надежность устройства.Наиболее близким к предлагаемому устройству является двигательно-движительнь 1 й комплекс 2, содержащий рабочее крыло (лопасти) и соединенный с корневой частью крыла приводной элемент, установленный на основании с возможностью качательного сферического движения, т.е. трехмерного движения, при котором все постоянные и мгновенные оси качания и поворота пересекаются в одной точке - центре сферического движения. Приводной элемент выполнен в виде снабженной двумя поперечными соосными цапфами втулки. Движение приводного элемента может быть также определено траекторией, описываемой перемещением его геометрической оси (совпадает с осью втулки),проходящей через центр сферического движения перпендикулярно поворотной оси крыла. Эта траектория имеет вид размещенной на сферической поверхности окружности, т.е. замкнутой кривой, имеющей постоянную кривизну. Направляющая кинематическая группа, обеспечивающая качание и поворот крыла, выполнена в виде установленного на основании рабочего вала, щарнирно связанного косым кривощипом с приводным элементом(втулкой). Опорная кинематическая группа, передающая реактивную силу на основание,образована при помощи установленной на основании с возможностью поворота вилки,щарнирно связанной с упомянутыми соосными цапфами втулки.Известное устройство характеризуется сферическим движением приводного элемента,при котором траектория его геометрической оси, совпадающей с осью косого кривошипа,имеет вид окружности. При этом поворотная ось крыла описывает на сферической поверхности траекторию в виде вытянутой в плоскости качания восьмерки (плоскость качания проходит через ее концы и середину). Это приводит к существенному уменьшению инерционных сил, так как в крайних положениях крыло не останавливается, а продолжает движение по дуге конечного радиуса. Однако и для данного устройства присуща уже упоминаемая относительно малая величина оптимального угла качания крыла и, дополнительно, относительно малая угловая скорость поворота крыла вокруг своей поворотной оси, что приводит к уменьшению эффективности вихревого взаимодействия крыла с текучей средой. Малая угловая скорость поворота крыла обусловлена тем, что геометрическая ось приводного элемента совпадает с осью кривошипа и углы поворота и качания крыла одинаковы и равны углу между осями кривошипа и рабочего вала. Можно отметить также, что и в этом устройстве отсутствует встроенная в приводной механизм внутренняя передача, а шарниры опорной кинематической группы, в силу их малого разноса в вилке,подвержены высоким знакопеременным нагрузкам.Предлагаемое изобретение решает задачу устранения основного недостатка прототипа малой эффективности взаимодействия двигательно-движительного комплекса с текучей средой. Дополнительно решаются задачи увеличения надежности работы, расширения функциональных возможностей и конструктивной базы (вариантности выполнения). Основным техническим результатом изобретения является увеличение оптимального угла качания крыла и увеличение вихревого движения крыла путем изменения исходной траектории перемещения геометрической оси приводного элемента, что повышает эффективность взаимодействия двигательно-движительного комплекса с текучей средой, т.е. решает поставленную задачу. Одновременно решаются упомянутые дополнительные задачи за счет дополнительных технических результатов, таких какрасширение конструктивных возможностей реализации иных сложных законов перемещения крылареализация компактной внутренней передачи путем использования приводного элемента в качестве ведущего (ведомого) звена зубчатой передачиповышение надежности устройства за счет более простой и менее нагруженной опорной кинематической группы.Для этого в известном двигательно-движительном комплексе, содержащем, по меньшей мере, одно рабочее крыло (может быть совокупность крыльев с общей корневой частью) и соединенный с его корневой частью приводной элемент, установленный на основании с возможностью качательного сферического движения, определяемого перемещением его геометрической оси, проходящей через центр сферического движения перпендикулярно поворотной оси крыла и описывающей на сферической поверхности замкнутую криволинейную траекторию при помощи направляющей кинематической группы, связывающей приводной элемент с установленным на основании рабочим валом,а также при помощи опорной кинематической группы, передающей реактивную силу на основание, достижение основного технического результата во всех случаях реализации устройства обусловлено тем, что упомянутая траектория имеет переменную кривизну.Простейшей формой траектории переменной кривизны может быть эллипс с большой осью в 1,2-1,5 раза большей, чем его малая ось. При расположении большой оси эллипса в плоскости качания крыла полный угол качания увеличивается относительно определяемого малой осью эллипса заданного (исходного) угла поворота крыла, что приводит к увеличению полного и оптимального углов качания крыла и более медленному изменению оптимального угла в пределах угла качания.При расположении малой оси эллипса в средней плоскости качания крыла увеличивается угол поворота крыла относительно определяемого малой осью эллипса заданного(исходного) угла качания, что приводит К увеличению угловой скорости поворота крыла при прохождении крайних положений и, соответственно, К росту эффективности вихревого взаимодействия крыла с текучей средой.Для повышения общей эффективности работы устройства за счет суммарного использования эффектов увеличения как оптимального угла качания, так и увеличения эффективности вихревого взаимодействия крыла при заданных (исходных) углах качания и поворота траектория может иметь форму овала, состоящего двух равных пар участков малой кривизны и двух равных пар участков большей кривизны, при этом ось овала, проходящая через середину участков малой кривизны, располагается в плоскости качания крыла.Для относительного увеличения полного угла качания траектория может иметь форму вытянутого овала, состоящего из двух неравных пар участков меньшей кривизны и двух равных пар участков большей кривизны, при этом его большая ось расположена в плоскости качания крыла и в 1,2-1,5 раза больше его малой оси. В этом случае участки малой кривизны, размещенные симметрично большой оси овала, определяют увеличения полного и оптимального углов качания крыла, а участки малой кривизны, размещенные симметрично малой оси овала, определяют увеличение эффективности вихревого взаимодействия крыла. (В абстрактном пределе овальные траектории вырождается в прямоугольники, при этом упомянутые эффекты также достигают предела, однако работа устройства невозможна по кинематическим соображениям).Направляющая кинематическая группа, реализующая предложенный закон перемещения крыла, может быть выполнена в виде установленных на приводном элементе диаметрально противоположно направляющих, соответствующих принятой траектории, и эквидистантнь 1 х им зубчатых колес, обкатывающихся, соответственно, по установленным на концах рабочего вала роликам и шестерням. Т.е. делительные линии зубчатых колес должны строго следовать пространственной форме направляющих. При этом, для точного центрирования приводного элемента, последний соединен центрующим сферическим шарниром с основанием.Возможна также реализация предложенных законов перемещения крыла при вь 1 полнении направляющей кинематической группы в виде размещенного в полом рабочем валу и шарнирно соединенного с приводным элементом промежуточного вала, связанного в центре сферического движения с рабочим валом при помощи передающего под переменным углом крутящий момент сферического шарнира, при этом промежуточный вал снабжен на концах роликами и шестернями, обкатывающимися, соответственно, по установленным на основании диаметрально противоположно направляющим, соответствующим принятой траектории, и по эквидистантным им зубчатым колесам.В предложенных примерах выполнения направляющих кинематических групп каждая направляющая может быть выполнена в виде желоба.В этих же примерах упомянутые зубчатые колеса могут быть выполнены как с внутренним зацеплением, так и с внешним зацеплением. Внутреннее зацепление предпочтительно,так как при заданном угле качания крыла и конструктивно ограниченном диаметре зацепления можно получить большее передаточное число и лучшее качество зацепления.В некоторых случаях внешнее устройство может быть установлено на рабочем валу,например генератор. Однако, с целью получения дополнительной передачи и компактного присоединения двигательно-движительного комплекса к различным внешним устройствам, основание снабжено трубчатой частью с размещенным внутри ее присоединительным валом, а рабочий вал снабжен установленным на нем в средней части зубчатым коническим колесом, взаимодействующим с конической шестерней, установленной на присоединительном валу.Опорная кинематическая группа может быть выполнена в виде общего кожуха, закрепленного на приводном элементе. Т.е. в этом случае кожух и приводной элемент кинематически представляют одно целое. Для увеличения плеча действия реактивных сил и со
МПК / Метки
Метки: виг-4, комплекс, двигательно-движительный
Код ссылки
<a href="https://by.patents.su/8-7036-dvigatelno-dvizhitelnyjj-kompleks-vig-4.html" rel="bookmark" title="База патентов Беларуси">Двигательно-движительный комплекс ВИГ-4</a>
Двигательно-движительный комплекс ВИГ-3
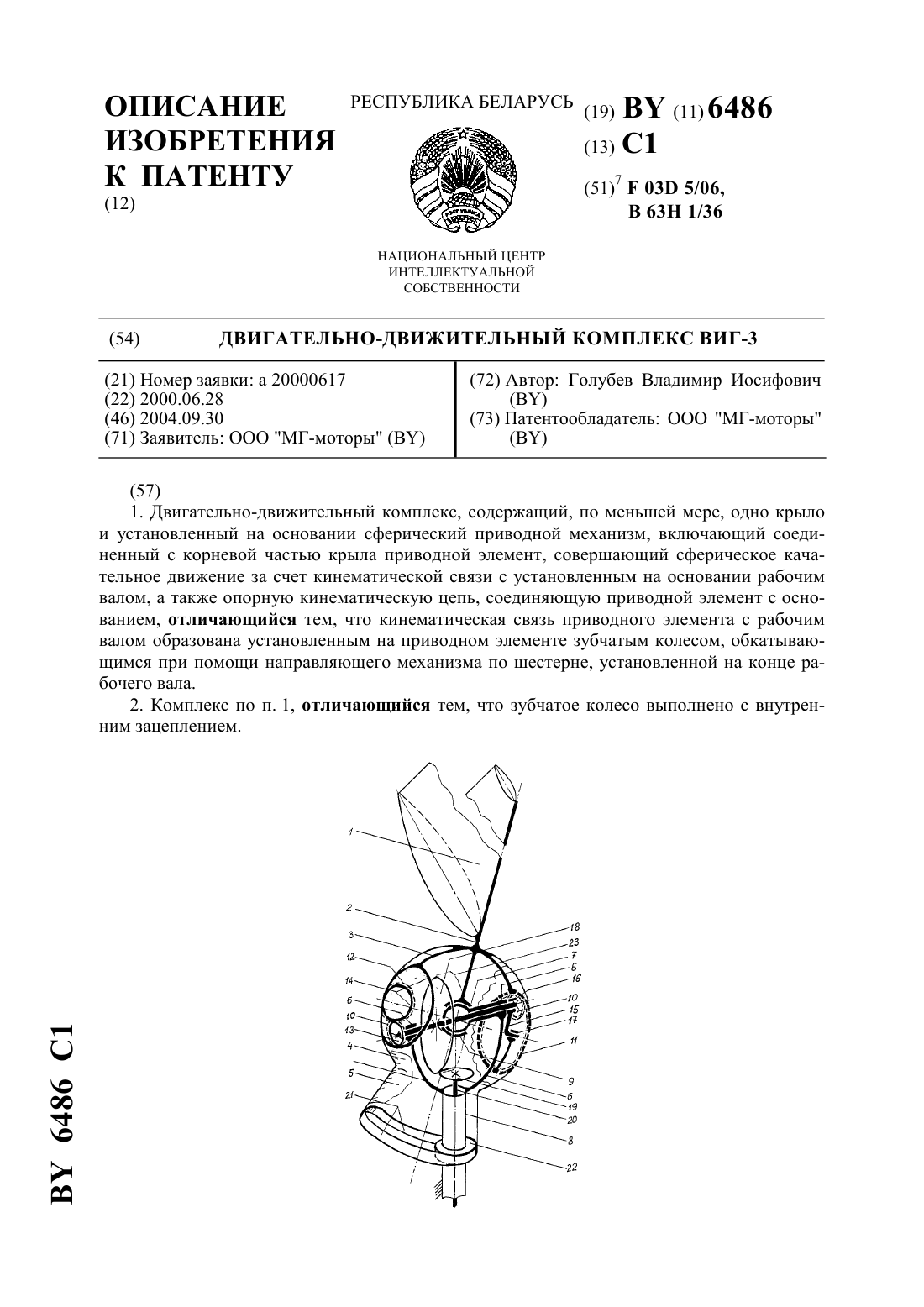
Номер патента: 6486
Опубликовано: 30.09.2004
Автор: Голубев Владимир Иосифович
Метки: виг-3, двигательно-движительный, комплекс
Текст:
...варианта должны обеспечивать сферическое перемещение приводного элемента и правильное зацепление зубчатых колес путем исключения радиальных сил в зацеплении и возможности осевого смещения приводного элемента относительно рабочего вала. В частности, строго сферическое перемещение приводного элемента может быть достигнуто вводом в состав направляющего механизма центрующего сферического шарнира,соединяющего приводной элемент с основанием. В...
Двигательно-движительный комплекс ВИГ -1
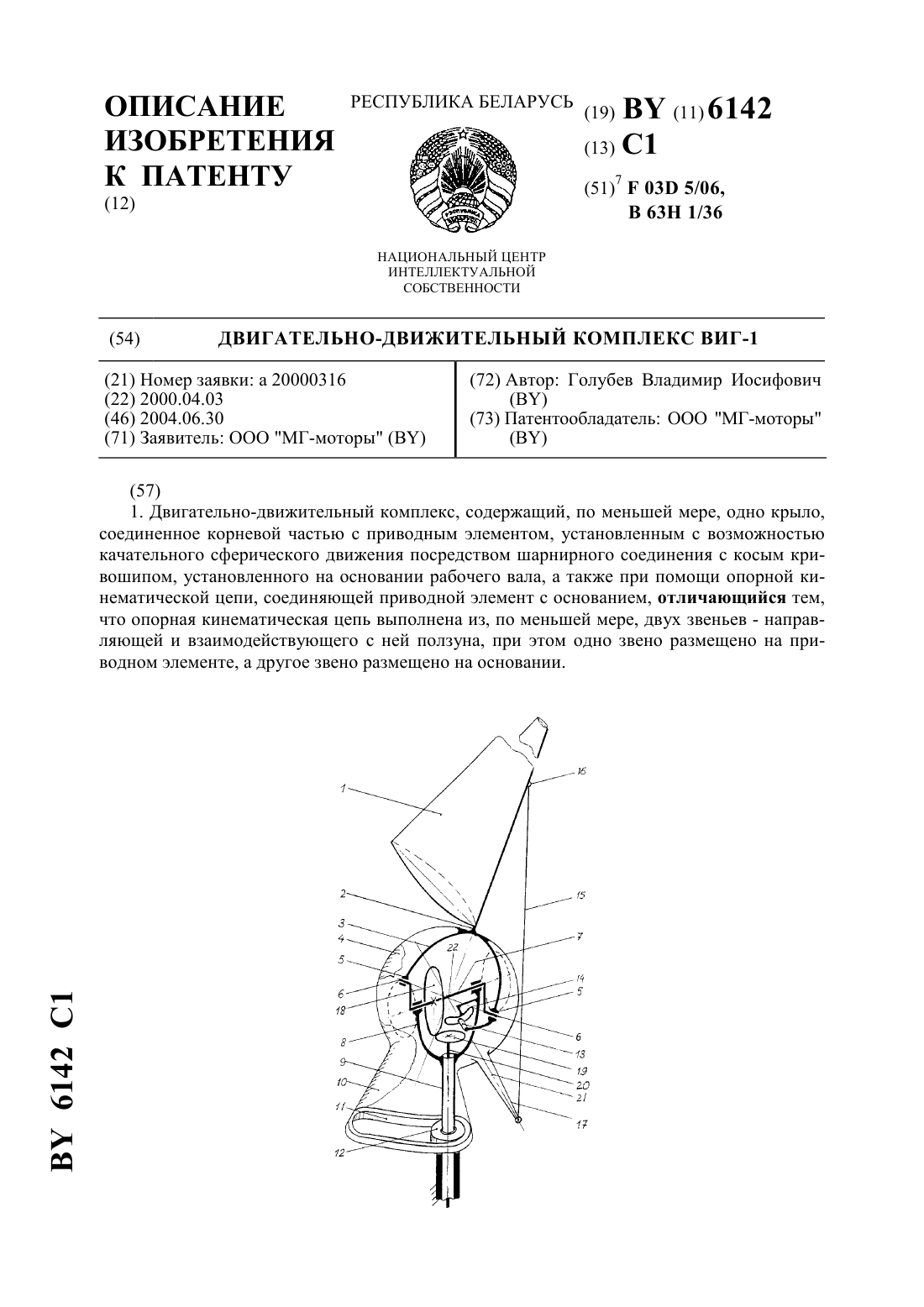
Номер патента: 6142
Опубликовано: 30.06.2004
Автор: Голубев Владимир Иосифович
Метки: двигательно-движительный, виг, комплекс
Текст:
...плоскостях (что необходимо для их кинематического согласования) и работают параллельно. Основание может быть снабжено трубчатой частью, а рабочий вал может быть выполнен с двумя соосными кривошипами на концах, соединенными, соответственно, двумя шарнирами с приводным элементом, при этом рабочий вал может быть снабжен установленным на нем в средней части зубчатым коническим колесом, взаимодействующим с конической шестерней, установленной...
Комплекс водоснабжения
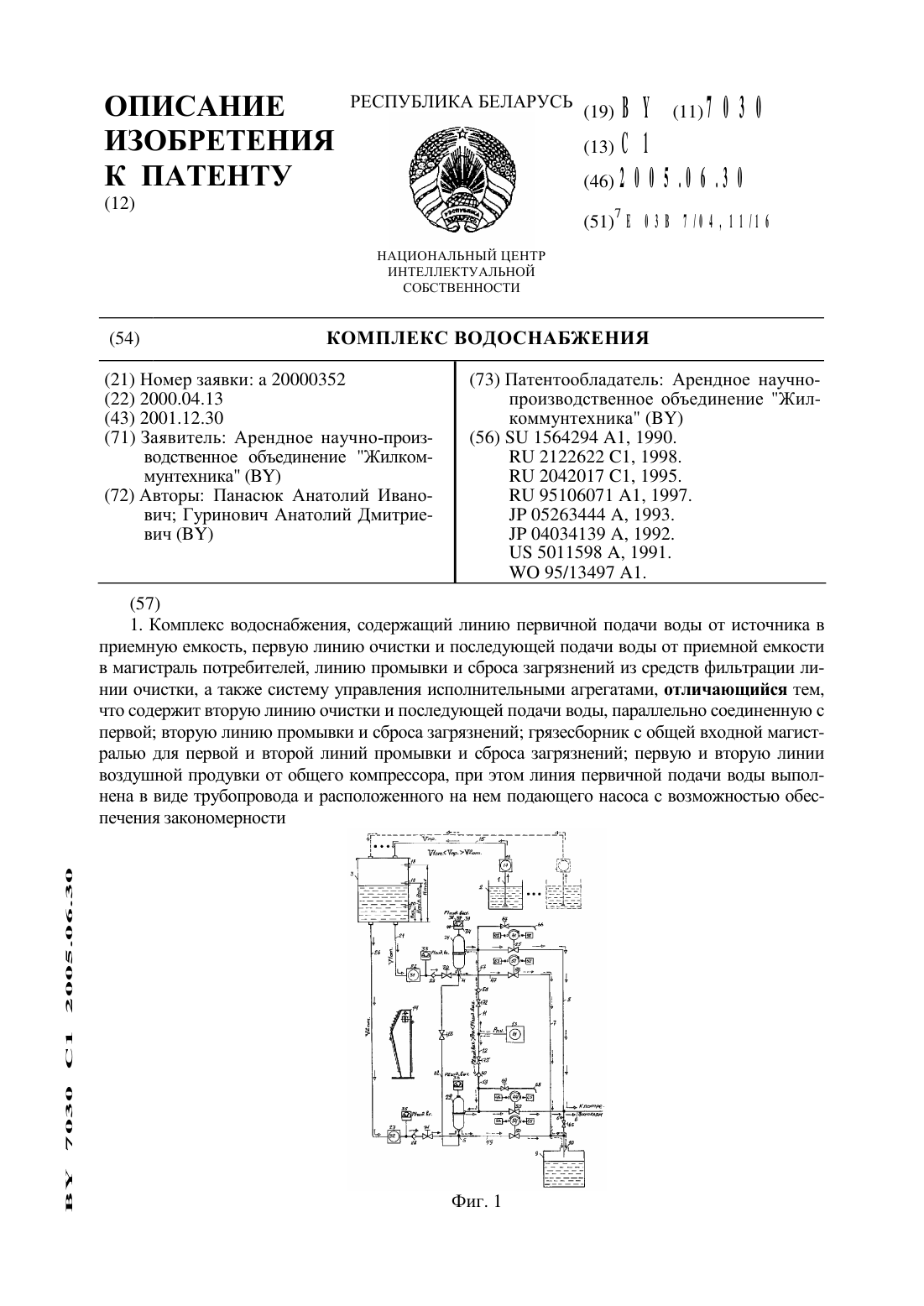
Номер патента: 7030
Опубликовано: 30.06.2005
Авторы: Панасюк Анатолий Иванович, Гуринович Анатолий Дмитриевич
МПК: E03B 11/16, E03B 7/04
Метки: водоснабжения, комплекс
Текст:
...в положении,отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра, а в датчике давления на выходе каждого скорого фильтра задатчик минимально допустимо ВУ 7030 С 12005.06.30го давления установлен относительно измерительной щкалы в положении, отвечающем предельно-допустимому загрязнению соответствующего скорого фильтра и снижению интенсивности подачи воды потребителям, при этом задатчик максимально допустимого...
Самоходный мобильный комплекс
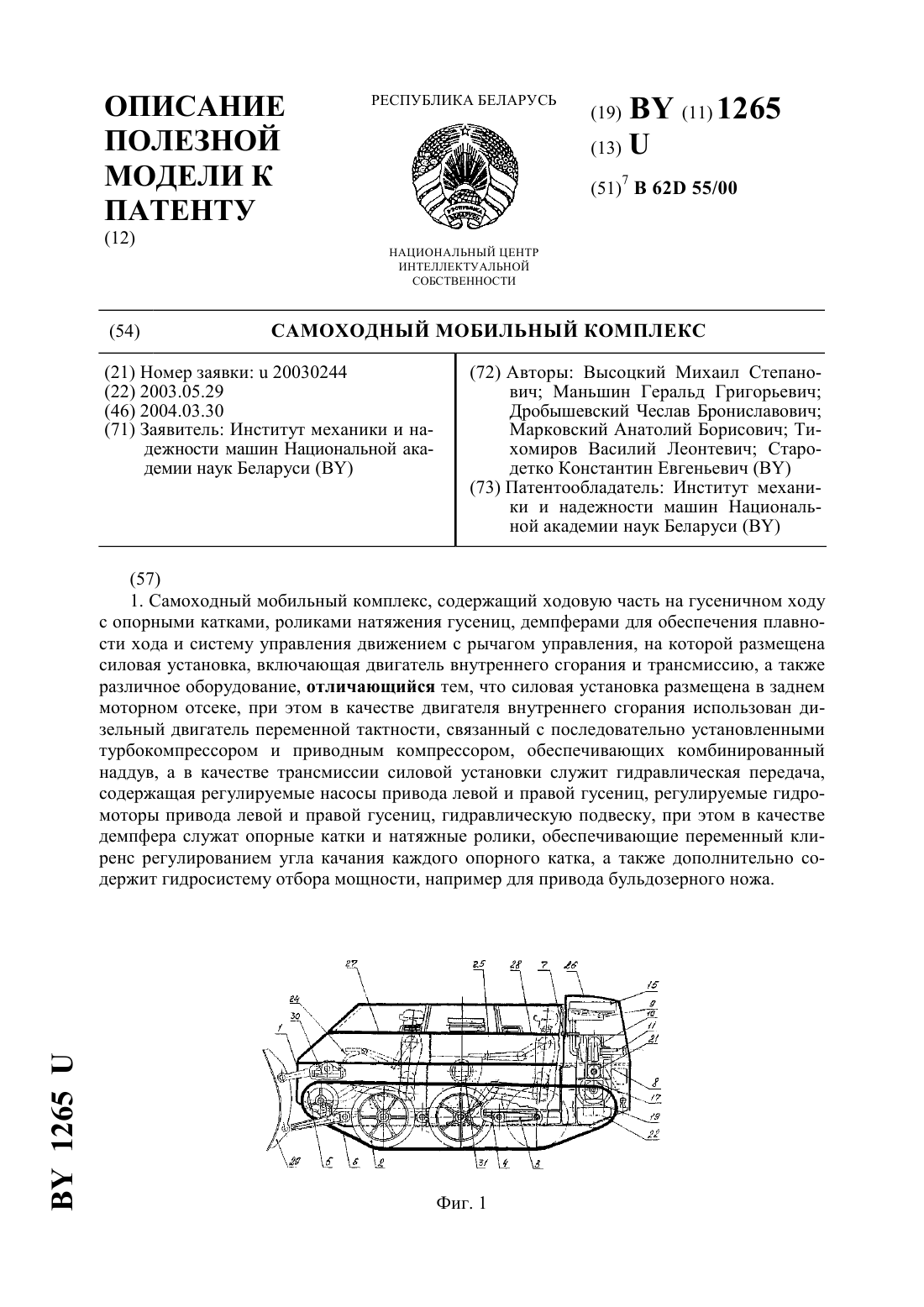
Номер патента: U 1265
Опубликовано: 30.03.2004
Авторы: Маньшин Геральд Григорьевич, Высоцкий Михаил Степанович, Марковский Анатолий Борисович, Стародетко Константин Евгеньевич, Дробышевский Чеслав Брониславович, Тихомиров Василий Леонтевич
МПК: B62D 55/00
Метки: комплекс, мобильный, самоходный
Текст:
...различное оборудование, причем силовая установка размещена в заднем моторном отсеке, при этом в качестве двигателя внутреннего сгорания использован дизельный двигатель переменной тактности, связанный с последовательно установленными турбокомпрессором и приводным компрессором, обеспечивающих комбинированный наддув, а в качестве трансмиссии силовой установки служит гидравлическая передача, содержащая регулируемые насосы привода левой и правой...
Защитно-стимулирующий комплекс для защиты растений от болезней и регулирования их роста (варианты)
Номер патента: 4178
Опубликовано: 30.12.2001
Автор: Клименко Владимир Иванович
МПК: A01N 59/00, A01N 61/00
Метки: комплекс, болезней, роста, растений, регулирования, защитно-стимулирующий, защиты, варианты
Текст:
...основы Полиазофоса в 1,5 раза при сохранении на одинаковом уровне в сравнении с известными фунгицидными составами биологической эффективности фунгицида 4178 1 позволяет уменьшить загрязнение окружающей среды и количество солей меди в сельскохозяйственной продукции, предназначенной на продовольственные цели или на корм скоту. Важным преимуществом защитно-стимулирующего комплекса Полиазофос является комплексное воздействие на растения, при...
Предыдущий патент: Способ захоронения твердых отходов
Следующий патент: Способ лечения послеоперационного перитонита
Случайный патент: Деформационный шов