Поворотный шаговый двигатель
Номер патента: 13845
Опубликовано: 30.12.2010
Авторы: Хомутов Эдуард Фёдорович, Хомутов Виталий Эдуардович
Текст
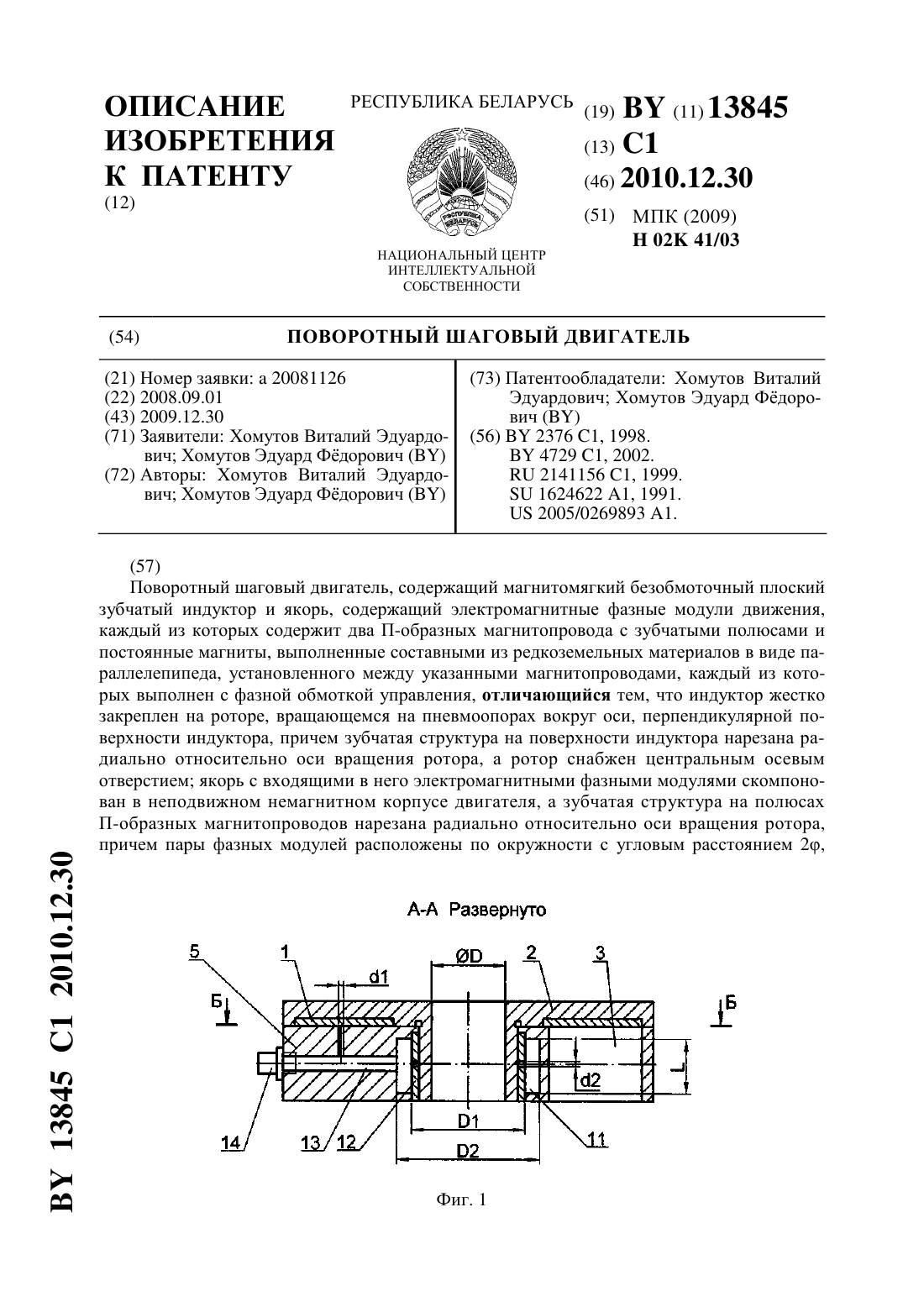
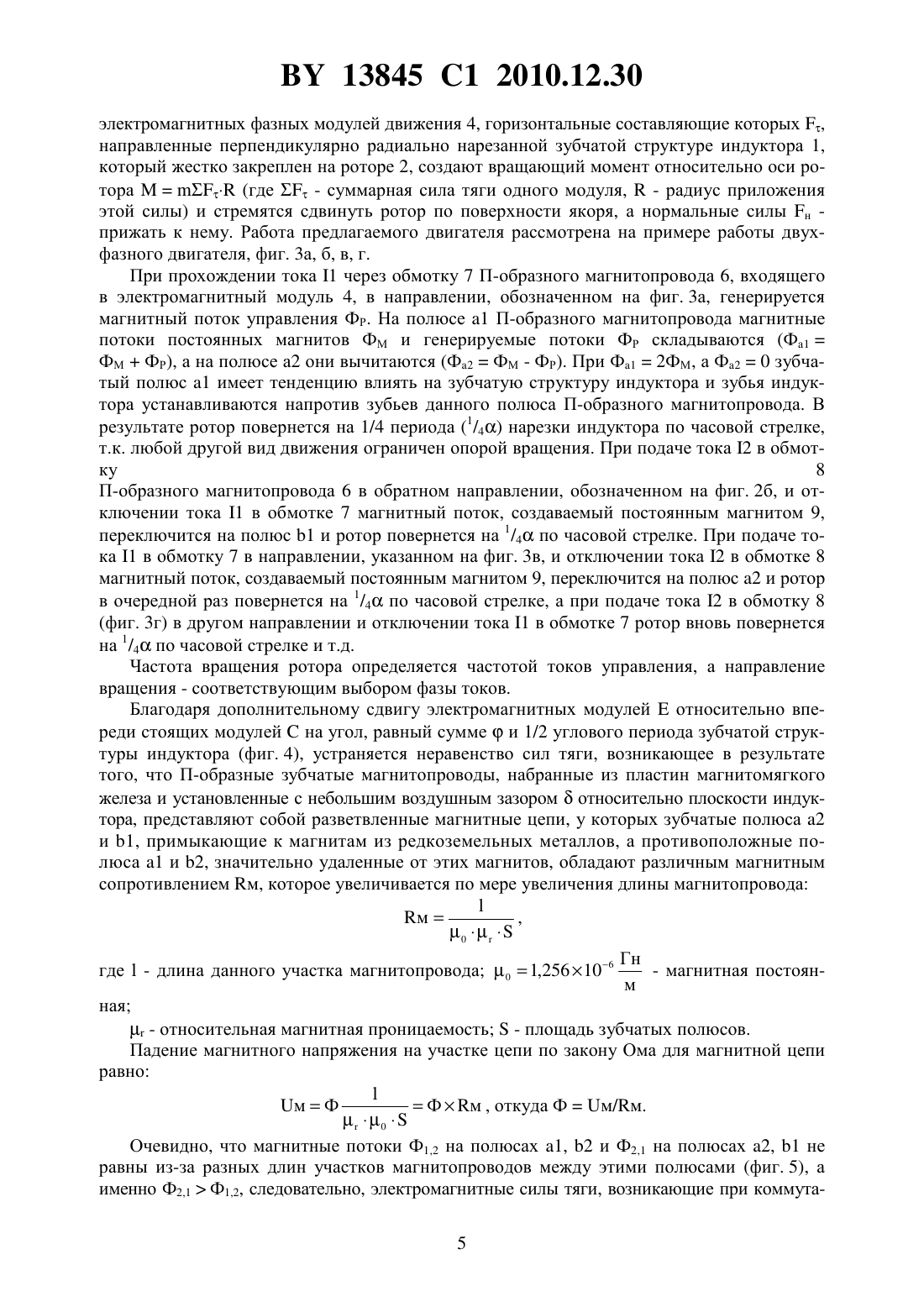
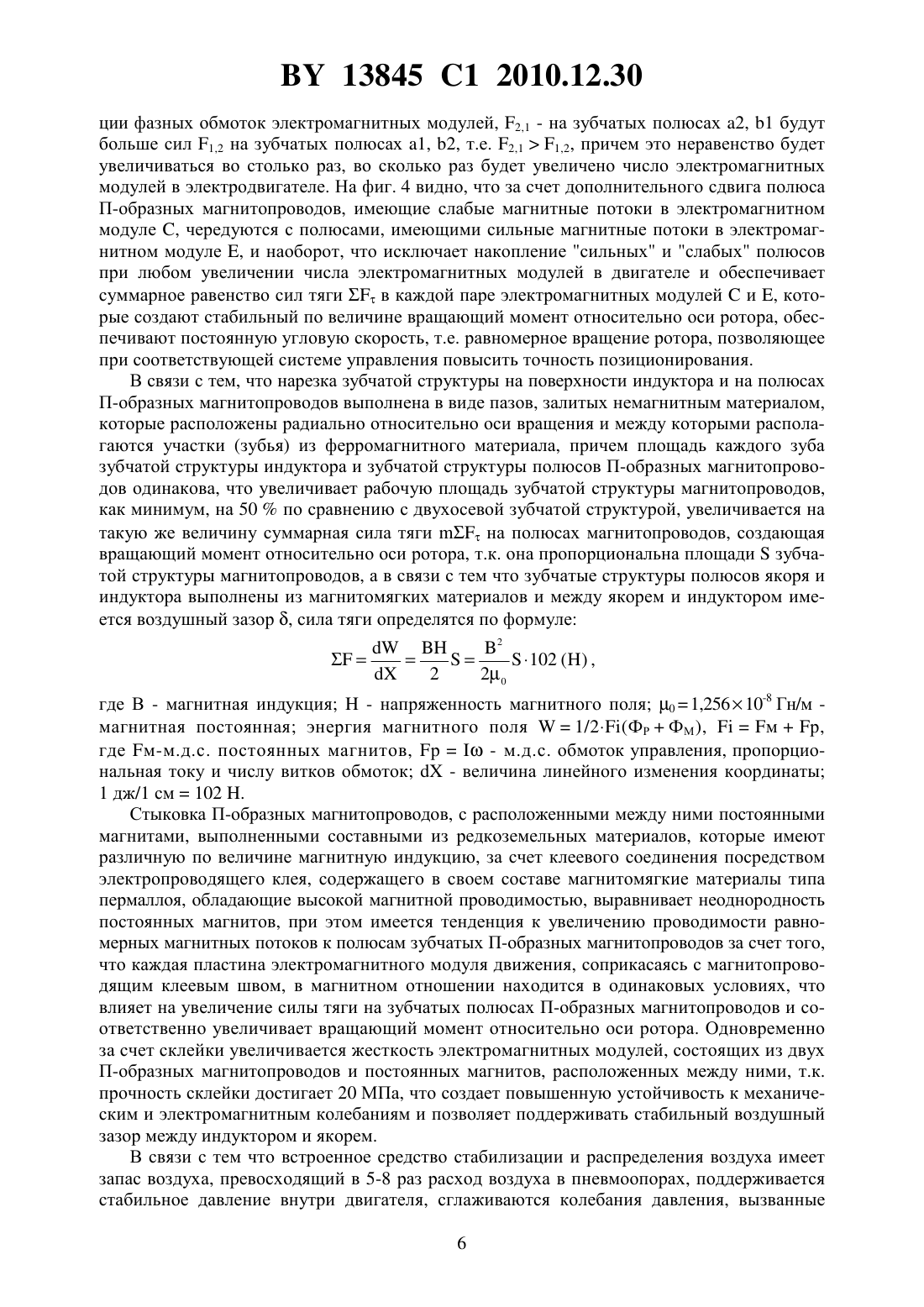
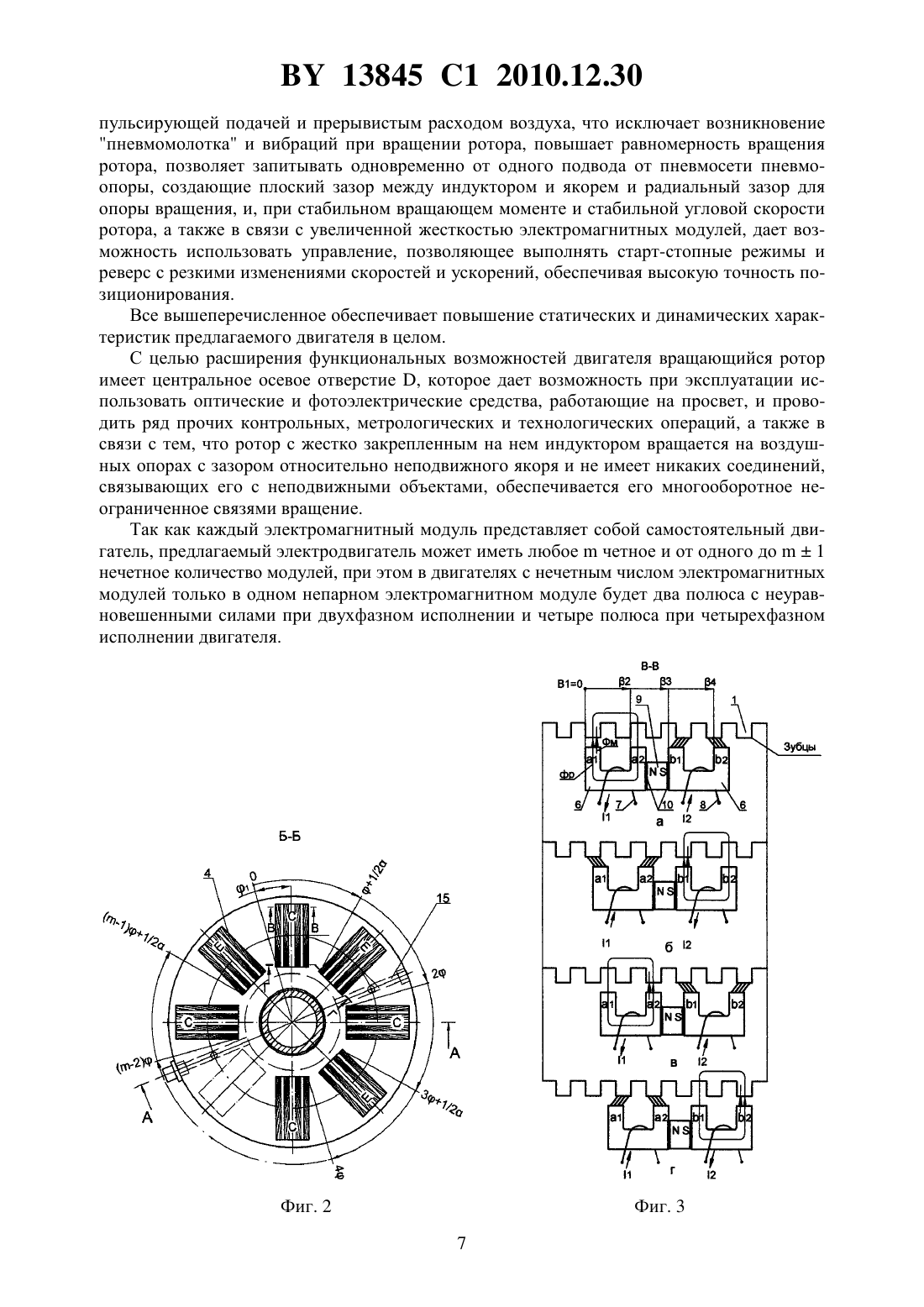
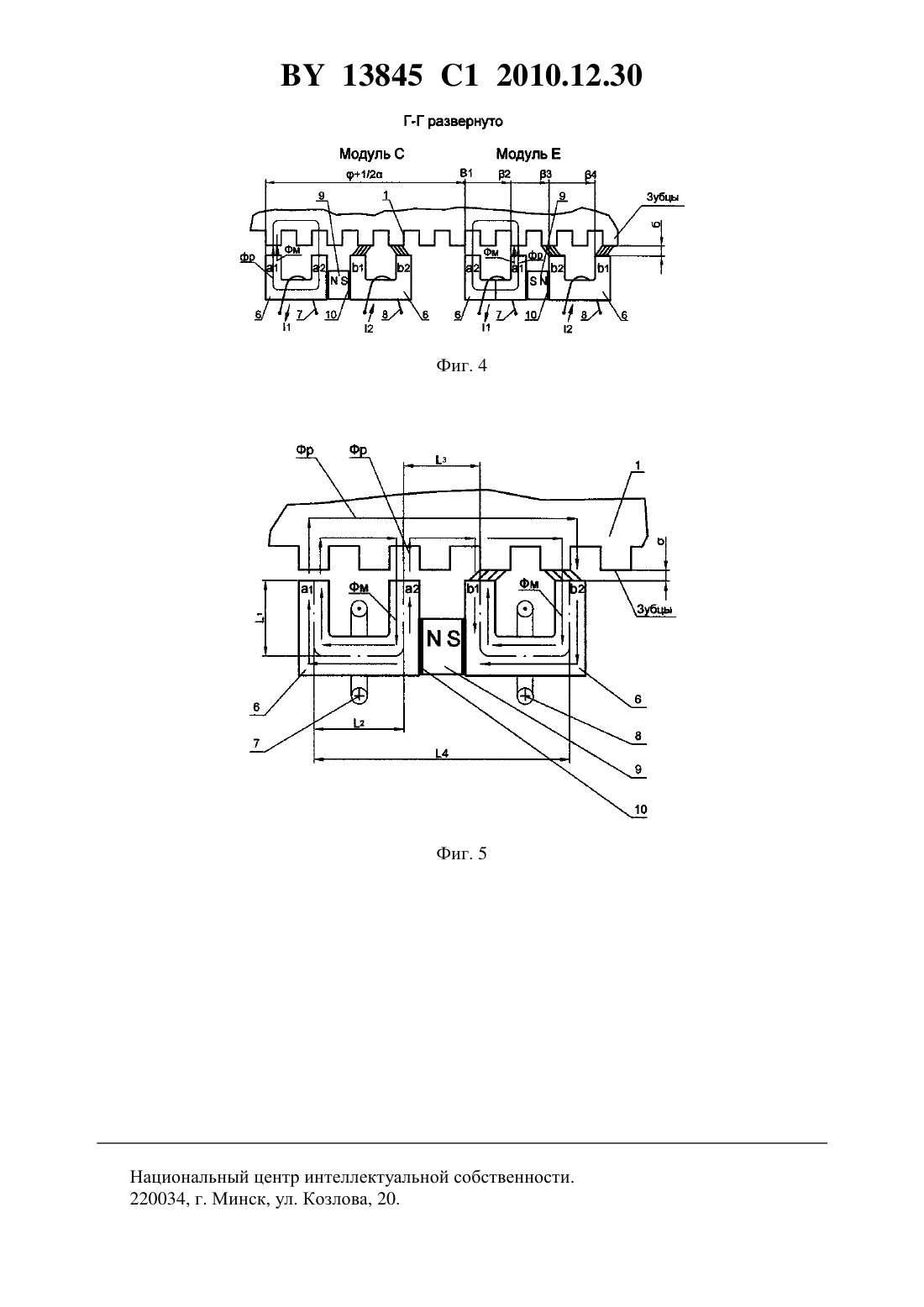
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявители Хомутов Виталий Эдуардович Хомутов Эдуард Фдорович(72) Авторы Хомутов Виталий Эдуардович Хомутов Эдуард Фдорович(73) Патентообладатели Хомутов Виталий Эдуардович Хомутов Эдуард Фдорович(57) Поворотный шаговый двигатель, содержащий магнитомягкий безобмоточный плоский зубчатый индуктор и якорь, содержащий электромагнитные фазные модули движения,каждый из которых содержит два П-образных магнитопровода с зубчатыми полюсами и постоянные магниты, выполненные составными из редкоземельных материалов в виде параллелепипеда, установленного между указанными магнитопроводами, каждый из которых выполнен с фазной обмоткой управления, отличающийся тем, что индуктор жестко закреплен на роторе, вращающемся на пневмоопорах вокруг оси, перпендикулярной поверхности индуктора, причем зубчатая структура на поверхности индуктора нарезана радиально относительно оси вращения ротора, а ротор снабжен центральным осевым отверстием якорь с входящими в него электромагнитными фазными модулями скомпонован в неподвижном немагнитном корпусе двигателя, а зубчатая структура на полюсах П-образных магнитопроводов нарезана радиально относительно оси вращения ротора,причем пары фазных модулей расположены по окружности с угловым расстоянием 2, Фиг. 1 13845 1 2010.12.30 содержащим целое число угловых периодов зубчатой структуры индуктора, а в каждой паре фазных модулей второй фазный модуль сдвинут по отношению к первому модулю на угол, равный суммеи 1/2 углового периода зубчатой структуры индуктора между постоянными магнитами и П-образными магнитопроводами выполнено клеевое соединение посредством электропроводящего клея, корпус двигателя снабжен встроенным в него средством стабилизации и распределения воздуха, объем которого больше объема расходуемого воздуха в пневмоопорах от 5 до 8 раз. Предлагаемое изобретение относится к электротехнике, а именно к поворотным шаговым электродвигателям с плоским и радиальным рабочими зазорами, и может быть использовано для перемещения различных объектов и инструментов с поворотом вокруг оси, перпендикулярной плоскости перемещения. Известны шаговые электродвигатели, содержащие неподвижный плоский индуктор с двумя системами взаимно перпендикулярных прорезей на поверхности, образующих систему кубических зубцов, и подвижные якори с зубчатыми магнитопроводами и фазными обмотками управления, укрепленные в общем корпусе с возможностью поворота вокруг оси, перпендикулярной плоскости индуктора 119131 , МПК 02 41/02, 1983. Недостатками подобных конструкций является то, что нет возможности осуществить неограниченное связями многооборотное вращение якоря из-за того, что якорь с зубчатыми магнитопроводами и обмотками управления соединен с неподвижными элементами электросети и пневмосети, а также потеря сил тяги, возникающая в связи с неоднородностью постоянных магнитов и из-за наличия взаимно перпендикулярных прорезей на поверхности индуктора, что уменьшает площадь зубцовой структуры индуктора, контактирующей с зубцами якоря, не менее чем на 50 , в результате чего происходит уменьшение на такую же величину мощности двигателя. Наиболее близким по технической сущности к предлагаемому изобретению является механизм шагового перемещения, содержащий ферромагнитное зубчатое основание с зубчатой структурой на поверхности, нарезанной во взаимно перпендикулярных направлениях, на котором установлена каретка с расположенными на ней двигателями, в состав каждого из которых входят по два электромагнитных модуля, каждый из которых содержит два П-образных зубчатых магнитопровода, постоянные магниты из редкоземельных материалов и прямоугольные пластины из магнитомягкого материала, расположенные между П-образными зубчатыми магнитопроводами и постоянными магнитами, и обмотку управления патент 2376, МПК 02 41/03, 1996. Недостатком данного технического решения является то, что каждый двигатель состоит из двух электромагнитных модулей движения и для кругового вращения ротора необходимо как минимум четыре электромагнитных модуля, которые представляют собой два двигателя, а встроить нечетное число электромагнитных модулей в линейный шаговый двигатель, работающий с поворотом вокруг оси, невозможно. Вторым недостатком является сложность алгоритма управления, обеспечивающего вращение каретки, так как для этого необходимо включение четырех электромагнитных модулей, имеющих различные законы управления из-за несовпадения точек приложения результирующих сил на разных электромагнитных модулях, что приводит к нестабильности вращающего момента, неравномерному вращению и снижению точности позиционирования, чему способствует и двухосевая нарезка зубчатой структуры основания. Недостатком является и то, что между дополнительными прямоугольными пластинами из магнитомягкого материала, постоянными магнитами и двумя П-образными магнитопроводами нет силового замыкания, что делает конструкцию нежесткой и приводит к прогибу вышеуказанных элементов под действием электромагнитных сил за счет притяжения к зубчатому основанию, что приводит к уменьшению воздушного зазора и в дальнейшем к затиранию и снижению точностных параметров. 2 13845 1 2010.12.30 Предлагаемое изобретение решает задачу повышения статических и динамических характеристик и расширения функциональных возможностей поворотного шагового двигателя. Поставленная задача решается тем, что в поворотном шаговом двигателе, содержащем магнитомягкий безобмоточный плоский зубчатый индуктор и якорь, содержащий электромагнитные фазные модули движения, каждый из которых содержит два П-образных магнитопровода с зубчатыми полюсами и постоянные магниты, выполненные составными из редкоземельных материалов в виде параллелепипеда, установленного между указанными магнитопроводами, каждый из которых выполнен с фазной обмоткой управления,индуктор жестко закреплен на роторе, вращающемся на пневмоопорах вокруг оси, перпендикулярной поверхности индуктора, причем зубчатая структура на поверхности индуктора нарезана радиально относительно оси вращения ротора, а ротор снабжен центральным осевым отверстием якорь с входящими в него электромагнитными фазными модулями скомпонован в неподвижном немагнитном корпусе двигателя, а зубчатая структура на полюсах П-образных магнитопроводов нарезана радиально относительно оси вращения ротора,причем пары фазных модулей расположены по окружности с угловым расстоянием 2,содержащим целое число угловых периодов зубчатой структуры индуктора, а в каждой паре фазных модулей второй фазный модуль сдвинут по отношению к первому модулю на угол, равный суммеи 1/2 углового периода зубчатой структуры индуктора между постоянными магнитами и П-образными магнитопроводами выполнено клеевое соединение посредством электропроводящего клея, корпус двигателя снабжен встроенным в него средством стабилизации и распределения воздуха, объем которого больше объема расходуемого воздуха в пневмоопорах от 5 до 8 раз. Суть изобретения поясняется чертежами. На фиг. 1 изображен общий вид устройства по сечению А-А на фиг. 2 - схема якоря с расположением зубчатой структуры на полюсах магнитопроводов с разрезом Б-Б по воздушному зазору на фиг. 3 поясняется физика работы устройства на фиг. 4 - схема пары фазных модулей с дополнительным смещением второго модуля на фиг. 5 - схема магнитопровода с указанием длин участков между полюсами по средней линии. Поворотный шаговый двигатель (фиг. 1, 2) содержит магнитомягкий безобмоточный плоский индуктор 1 с зубчатой структурой, нарезанной радиально относительно оси вращения, который жестко закреплен на роторе 2, вращающемся на пневмоопорах вокруг оси перпендикулярной поверхности индуктора, ротор снабжен центральным осевым отверстием . Якорь 3 с входящими в негоэлектромагнитными фазными модулями 4 скомпонован в неподвижном немагнитном корпусе 5 двигателя, а парыиэлектромагнитных фазных модулей 4, входящие в состав якоря, расположены по окружности с угловым расстоянием 2 межу каждой парой, которое приведено к периоду зубчатой структуры индуктора 2,где- целое число зубьев индуктора в диапазоне угла 2, равное 360/0,5360/,где- период (угловой шаг) зубчатой структуры индуктора- количество электромагнитных фазных модулей в двигателе- количество зубьев зубчатой структуры индуктора. Каждый изэлектромагнитных фазных модулей 4 конструктивно представляет собой одноосевой линейный шаговый двигатель, в состав которого входят два П-образных магнитопровода 6 с фазными обмотками управления 7 и 8, полюсами а 1, а 2, 1, 2, зубчатая структура которых нарезана радиально относительно оси вращения ротора с расположением первого базового зуба на угловом расстоянии 1 от центра электромагнитного модуля ,причем полюса а 1, а 2, 1, 2 поочередно сдвинуты относительно равномерно нарезанных зубьев индуктора (фиг. 2, 3) на угловые расстояния, определяемые по формулам 3 13845 1 2010.12.30 сдвиг полюса 110 сдвиг полюса 22(21/2) сдвиг полюса 13(31/4) сдвиг полюса 24(43/4),где 1, 2, 3, 4 - угловые расстояния между зубчатыми полюсами П-образных магнитопроводов 6, приведенные к периоду зубчатой структуры индуктора 2, 3, 4 - числа содержащие целое количество зубцов индуктора 0, 1/2, 1/4, 3/4 - коэффициенты, определяющие величину сдвига вышеуказанных полюсов. Дополнительно к угловому расстоянию 2, содержащему целое число угловых периодов зубчатой структуры индуктора, в каждой паре из /2 пар электромагнитных фазных модулейивторой фазный модульсдвинут по отношению к первому модулюна угол, равный суммеи 1/2 углового периода зубчатой структуры индуктора (т.е. на 1/2) (фиг. 2, 4), что при одной и той же нарезке зубчатой структуры на полюсах П-образных магнитопроводов всехэлектромагнитных фазных модулей, за счет сдвига электромагнитных модулейотносительно равномерно нарезанных зубьев индуктора к имеющемуся поочередному сдвигу полюсов 1, 2, 1, 2 добавилась 1/2 01/21/2 1/21/21 - сдвиг равен нулю 1/41/23/4 3/41/25/4 - сдвиг равен 1/4, что, в свою очередь, привело к смене положения зубчатых полюсов по отношению к постоянным редкоземельным магнитам 9, т.е. полюсаи 2, удаленные от магнитов 9 в электромагнитном модуле , заняли положение вблизи магнитов 9 в электромагнитном модулесоответственно своей новой величине сдвига относительно зубьев индуктора, а полюса 2,1 удалились от постоянных магнитов фиг. 4, причем зубчатые полюса, имеющие одинаковую величину сдвига, работают одновременно во всех электромагнитных модулях. Между двумя магнитопроводами 6 установлены постоянные магниты 9 из редкоземельных материалов, а между П-образными магнитопроводами 6 и постоянными магнитами 9 выполнено клеевое соединение 10 толщиной (0,050,3) мм, посредством электропроводящего клея, представляющего собой клеевую электропроводящую композицию на основе эпоксидных олигомеров и порошка из магнитомягкого материала типа пермаллоя, которое обладает высокой магнитной проводимостью и обеспечивает прочность склейки до 20 МПа. Корпус 5 снабжен встроенным в него средством стабилизации и распределения воздуха 11 (фиг. 1) с герметично установленной в нем втулкой 12, причем для образования плоского зазора между индуктором 1 и якорем 3 в средстве стабилизации и распределения воздуха 11 установлены жиклеры 1, а для радиального зазора направляющей вращения ротора вокруг оси - жиклеры 2. Объем воздуха, содержащийся в сред(12 - 2 2 ) , где 1 - посадочный стве стабилизации и распределения воздуха 4 диаметр втулки, 2 - внутренний диаметр,- высота, должен быть больше объема расходуемого воздуха в пневмоопорах двигателя от 5 до 8 раз. Поворотный шаговый двигатель работает следующим образом. Для создания плоской и радиальной пневмоопор в средство стабилизации и распределения воздуха 11 (фиг. 1, 2), встроенное в корпус двигателя 5, через подводящий радиальный канал 13 с штуцером 14 подается сжатый воздух, который через разводящие радиальные каналы 15 с жиклерами 1 попадает в пространство между якорем 3 и ротором 2 и стремится оторвать ротор от якоря. В то же время сила притяжения, создаваемая за счет магнитного взаимодействия между индуктором и якорем, противодействует силам давления, в результате чего создается стабилизированный воздушный зазор, одновременно воздух через втулку 12 с встроенными в нее жиклерами 2 поступает в направляющие вращения ротора, создавая подшипник вращения на воздушной смазке. Вращение ротора 2 осуществляется за счет электромагнитных сил тяги, возникающих на зубцовых структурах П-образных магнитопроводов при коммутации фазных обмоток управления 7 и 8 4 13845 1 2010.12.30 электромагнитных фазных модулей движения 4, горизонтальные составляющие которых ,направленные перпендикулярно радиально нарезанной зубчатой структуре индуктора 1,который жестко закреплен на роторе 2, создают вращающий момент относительно оси ротора(где- суммарная сила тяги одного модуля,- радиус приложения этой силы) и стремятся сдвинуть ротор по поверхности якоря, а нормальные силы н прижать к нему. Работа предлагаемого двигателя рассмотрена на примере работы двухфазного двигателя, фиг. 3 а, б, в, г. При прохождении тока 1 через обмотку 7 П-образного магнитопровода 6, входящего в электромагнитный модуль 4, в направлении, обозначенном на фиг. 3 а, генерируется магнитный поток управления ФР. На полюсе 1 П-образного магнитопровода магнитные потоки постоянных магнитов ФМ и генерируемые потоки ФР складываются (Фа 1 ФМФР), а на полюсе а 2 они вычитаются (Ф 2 ФМ - ФР). При Ф 12 ФМ, а Ф 20 зубчатый полюс 1 имеет тенденцию влиять на зубчатую структуру индуктора и зубья индуктора устанавливаются напротив зубьев данного полюса П-образного магнитопровода. В результате ротор повернется на 1/4 периода (1/4) нарезки индуктора по часовой стрелке,т.к. любой другой вид движения ограничен опорой вращения. При подаче тока 2 в обмотку 8 П-образного магнитопровода 6 в обратном направлении, обозначенном на фиг. 2 б, и отключении тока 1 в обмотке 7 магнитный поток, создаваемый постоянным магнитом 9,переключится на полюс 1 и ротор повернется на 1/4 по часовой стрелке. При подаче тока 1 в обмотку 7 в направлении, указанном на фиг. 3 в, и отключении тока 2 в обмотке 8 магнитный поток, создаваемый постоянным магнитом 9, переключится на полюс 2 и ротор в очередной раз повернется на 1/4 по часовой стрелке, а при подаче тока 2 в обмотку 8(фиг. 3 г) в другом направлении и отключении тока 1 в обмотке 7 ротор вновь повернется на 1/4 по часовой стрелке и т.д. Частота вращения ротора определяется частотой токов управления, а направление вращения - соответствующим выбором фазы токов. Благодаря дополнительному сдвигу электромагнитных модулейотносительно впереди стоящих модулейна угол, равный суммеи 1/2 углового периода зубчатой структуры индуктора (фиг. 4), устраняется неравенство сил тяги, возникающее в результате того, что П-образные зубчатые магнитопроводы, набранные из пластин магнитомягкого железа и установленные с небольшим воздушным зазоромотносительно плоскости индуктора, представляют собой разветвленные магнитные цепи, у которых зубчатые полюса 2 и 1, примыкающие к магнитам из редкоземельных металлов, а противоположные полюса 1 и 2, значительно удаленные от этих магнитов, обладают различным магнитным сопротивлением м, которое увеличивается по мере увеличения длины магнитопровода- магнитная постоянгде- длина данного участка магнитопровода 01,25610 6 м ная- относительная магнитная проницаемость- площадь зубчатых полюсов. Падение магнитного напряжения на участке цепи по закону Ома для магнитной цепи равно мФФм , откуда Фм/м.0 Очевидно, что магнитные потоки Ф 1,2 на полюсах 1, 2 и Ф 2,1 на полюсах 2, 1 не равны из-за разных длин участков магнитопроводов между этими полюсами (фиг. 5), а именно Ф 2,1 Ф 1,2, следовательно, электромагнитные силы тяги, возникающие при коммута 5 13845 1 2010.12.30 ции фазных обмоток электромагнитных модулей, 2,1 - на зубчатых полюсах 2, 1 будут больше сил 1,2 на зубчатых полюсах 1, 2, т.е. 2,11,2, причем это неравенство будет увеличиваться во столько раз, во сколько раз будет увеличено число электромагнитных модулей в электродвигателе. На фиг. 4 видно, что за счет дополнительного сдвига полюса П-образных магнитопроводов, имеющие слабые магнитные потоки в электромагнитном модуле , чередуются с полюсами, имеющими сильные магнитные потоки в электромагнитном модуле , и наоборот, что исключает накопление сильных и слабых полюсов при любом увеличении числа электромагнитных модулей в двигателе и обеспечивает суммарное равенство сил тягив каждой паре электромагнитных модулейи , которые создают стабильный по величине вращающий момент относительно оси ротора, обеспечивают постоянную угловую скорость, т.е. равномерное вращение ротора, позволяющее при соответствующей системе управления повысить точность позиционирования. В связи с тем, что нарезка зубчатой структуры на поверхности индуктора и на полюсах П-образных магнитопроводов выполнена в виде пазов, залитых немагнитным материалом,которые расположены радиально относительно оси вращения и между которыми располагаются участки (зубья) из ферромагнитного материала, причем площадь каждого зуба зубчатой структуры индуктора и зубчатой структуры полюсов П-образных магнитопроводов одинакова, что увеличивает рабочую площадь зубчатой структуры магнитопроводов,как минимум, на 50 по сравнению с двухосевой зубчатой структурой, увеличивается на такую же величину суммарная сила тягина полюсах магнитопроводов, создающая вращающий момент относительно оси ротора, т.к. она пропорциональна площадизубчатой структуры магнитопроводов, а в связи с тем что зубчатые структуры полюсов якоря и индуктора выполнены из магнитомягких материалов и между якорем и индуктором имеется воздушный зазор , сила тяги определятся по формуле где В - магнитная индукция- напряженность магнитного поля 01,25610-8 Гн/м магнитная постоянная энергия магнитного поля 1/2(ФРФМ),мр,где м-м.д.с. постоянных магнитов, р- м.д.с. обмоток управления, пропорциональная току и числу витков обмоток- величина линейного изменения координаты 1 дж/1 см 102 . Стыковка П-образных магнитопроводов, с расположенными между ними постоянными магнитами, выполненными составными из редкоземельных материалов, которые имеют различную по величине магнитную индукцию, за счет клеевого соединения посредством электропроводящего клея, содержащего в своем составе магнитомягкие материалы типа пермаллоя, обладающие высокой магнитной проводимостью, выравнивает неоднородность постоянных магнитов, при этом имеется тенденция к увеличению проводимости равномерных магнитных потоков к полюсам зубчатых П-образных магнитопроводов за счет того,что каждая пластина электромагнитного модуля движения, соприкасаясь с магнитопроводящим клеевым швом, в магнитном отношении находится в одинаковых условиях, что влияет на увеличение силы тяги на зубчатых полюсах П-образных магнитопроводов и соответственно увеличивает вращающий момент относительно оси ротора. Одновременно за счет склейки увеличивается жесткость электромагнитных модулей, состоящих из двух П-образных магнитопроводов и постоянных магнитов, расположенных между ними, т.к. прочность склейки достигает 20 МПа, что создает повышенную устойчивость к механическим и электромагнитным колебаниям и позволяет поддерживать стабильный воздушный зазор между индуктором и якорем. В связи с тем что встроенное средство стабилизации и распределения воздуха имеет запас воздуха, превосходящий в 5-8 раз расход воздуха в пневмоопорах, поддерживается стабильное давление внутри двигателя, сглаживаются колебания давления, вызванные 6 13845 1 2010.12.30 пульсирующей подачей и прерывистым расходом воздуха, что исключает возникновение пневмомолотка и вибраций при вращении ротора, повышает равномерность вращения ротора, позволяет запитывать одновременно от одного подвода от пневмосети пневмоопоры, создающие плоский зазор между индуктором и якорем и радиальный зазор для опоры вращения, и, при стабильном вращающем моменте и стабильной угловой скорости ротора, а также в связи с увеличенной жесткостью электромагнитных модулей, дает возможность использовать управление, позволяющее выполнять старт-стопные режимы и реверс с резкими изменениями скоростей и ускорений, обеспечивая высокую точность позиционирования. Все вышеперечисленное обеспечивает повышение статических и динамических характеристик предлагаемого двигателя в целом. С целью расширения функциональных возможностей двигателя вращающийся ротор имеет центральное осевое отверстие , которое дает возможность при эксплуатации использовать оптические и фотоэлектрические средства, работающие на просвет, и проводить ряд прочих контрольных, метрологических и технологических операций, а также в связи с тем, что ротор с жестко закрепленным на нем индуктором вращается на воздушных опорах с зазором относительно неподвижного якоря и не имеет никаких соединений,связывающих его с неподвижными объектами, обеспечивается его многооборотное неограниченное связями вращение. Так как каждый электромагнитный модуль представляет собой самостоятельный двигатель, предлагаемый электродвигатель может иметь любоечетное и от одного до 1 нечетное количество модулей, при этом в двигателях с нечетным числом электромагнитных модулей только в одном непарном электромагнитном модуле будет два полюса с неуравновешенными силами при двухфазном исполнении и четыре полюса при четырехфазном исполнении двигателя. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 8
МПК / Метки
МПК: H02K 41/03
Метки: поворотный, шаговый, двигатель
Код ссылки
<a href="https://by.patents.su/8-13845-povorotnyjj-shagovyjj-dvigatel.html" rel="bookmark" title="База патентов Беларуси">Поворотный шаговый двигатель</a>
Двухкоординатный линейный шаговый двигатель с совмещенными координатами
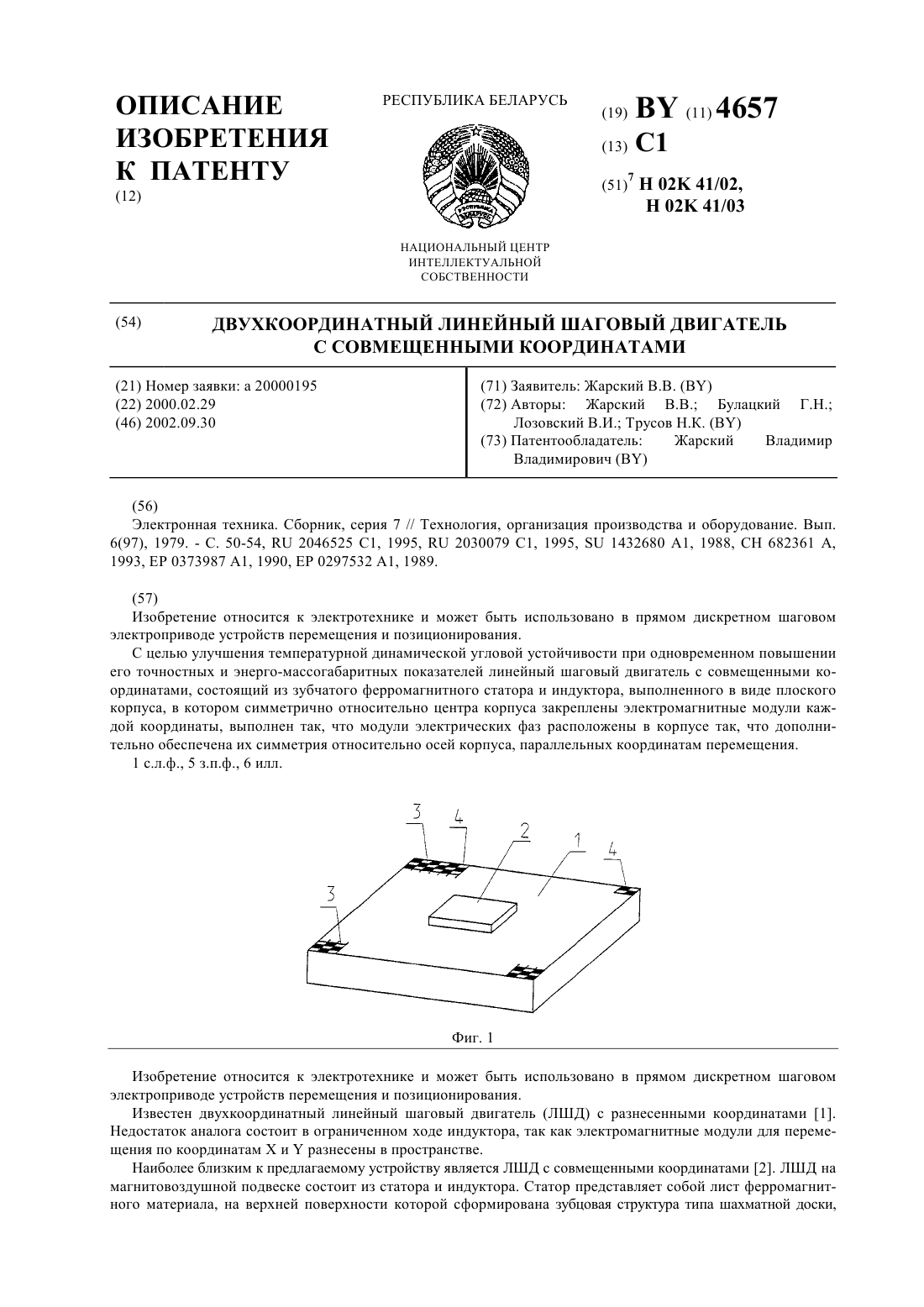
Номер патента: 4657
Опубликовано: 30.09.2002
Авторы: Трусов Николай Калистратович, Булацкий Геннадий Николаевич, Жарский Владимир Владимирович, Лозовский Валерий Иванович
МПК: H02K 41/03, H02K 41/02
Метки: совмещенными, двигатель, линейный, координатами, шаговый, двухкоординатный
Текст:
...ширине его стержня, у двухфазного модуля (фиг. 6 а) расход меди примерно в два раза больше чем у однофазного (фиг. 6 в). Расположение обмотки 7 в окне и на спинке магнитопровода приводит к увеличению высоты 2-фазного модуля по сравнению с однофазным. Следовательно, при одинаковой амплитуде тягового усилия индуктор ЛШД на двухфазных модулях будет иметь большую массу, большие габариты, чем на однофазных. Омическое сопротивление фазы...
Линейный шаговый магнитоэлектрический двигатель
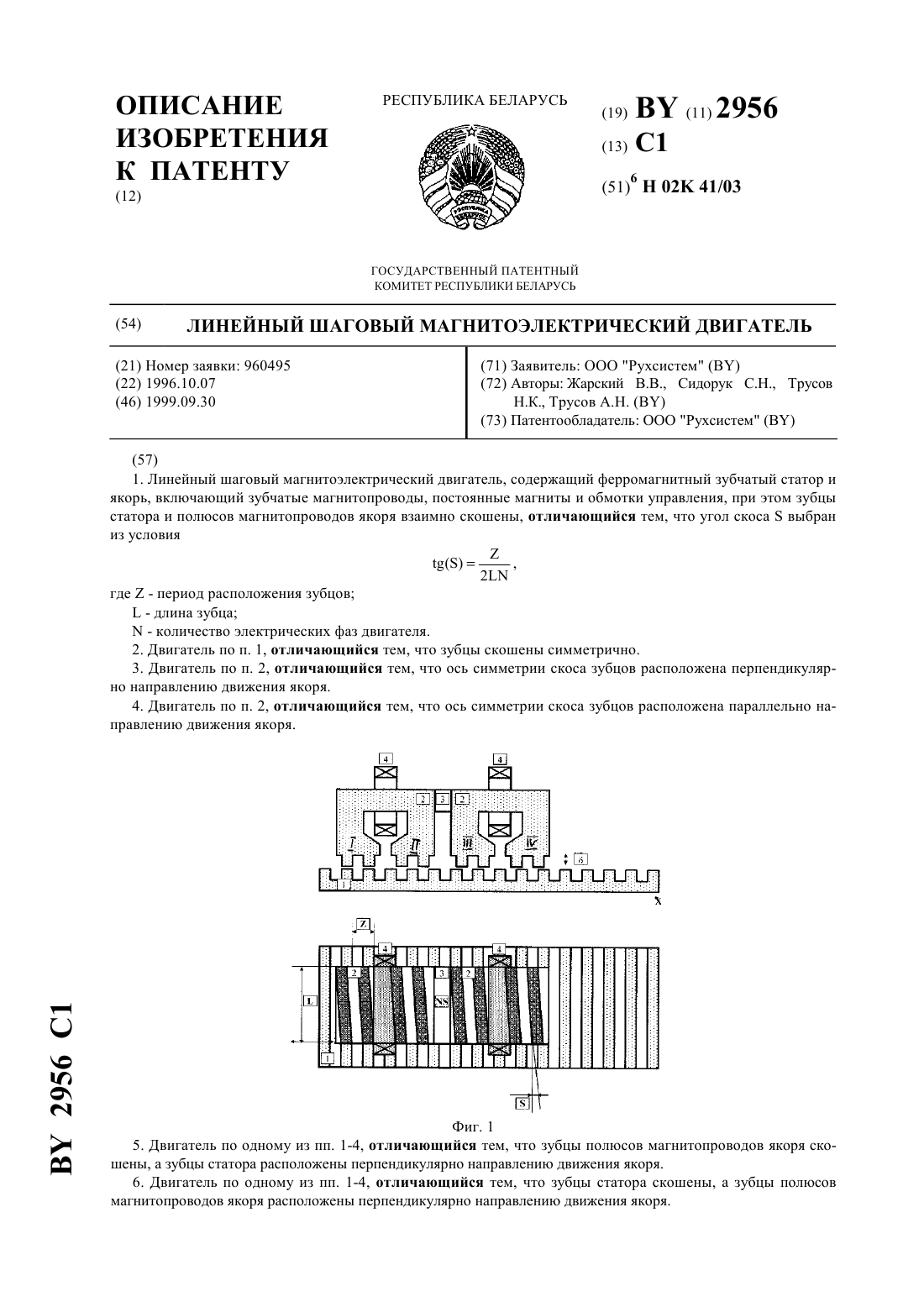
Номер патента: 2956
Опубликовано: 30.09.1999
Авторы: Жарский Владимир Владимирович, Трусов Николай Калистратович, Сидорук Сергей Николаевич, Трусов Алексей Николаевич
МПК: H02K 41/03
Метки: магнитоэлектрический, двигатель, шаговый, линейный
Текст:
...ось симметрии скоса зубцов которого расположена перпендикулярно направлению движения на фиг. 5 - изображен якорь, ось симметрии скоса зубцов которого расположена параллельно направлению движения. Линейный шаговый магнитоэлектрический двигатель содержит ферромагнитный зубчатый статор 1 и якорь, состоящий из магнитопровода 2, постоянного магнита 3 и обмоток управления 4, на полюсах магнитопровода 2 якоря, как и на статоре 1, расположены...
Многофазный линейный шаговый магнитоэлектрический двигатель
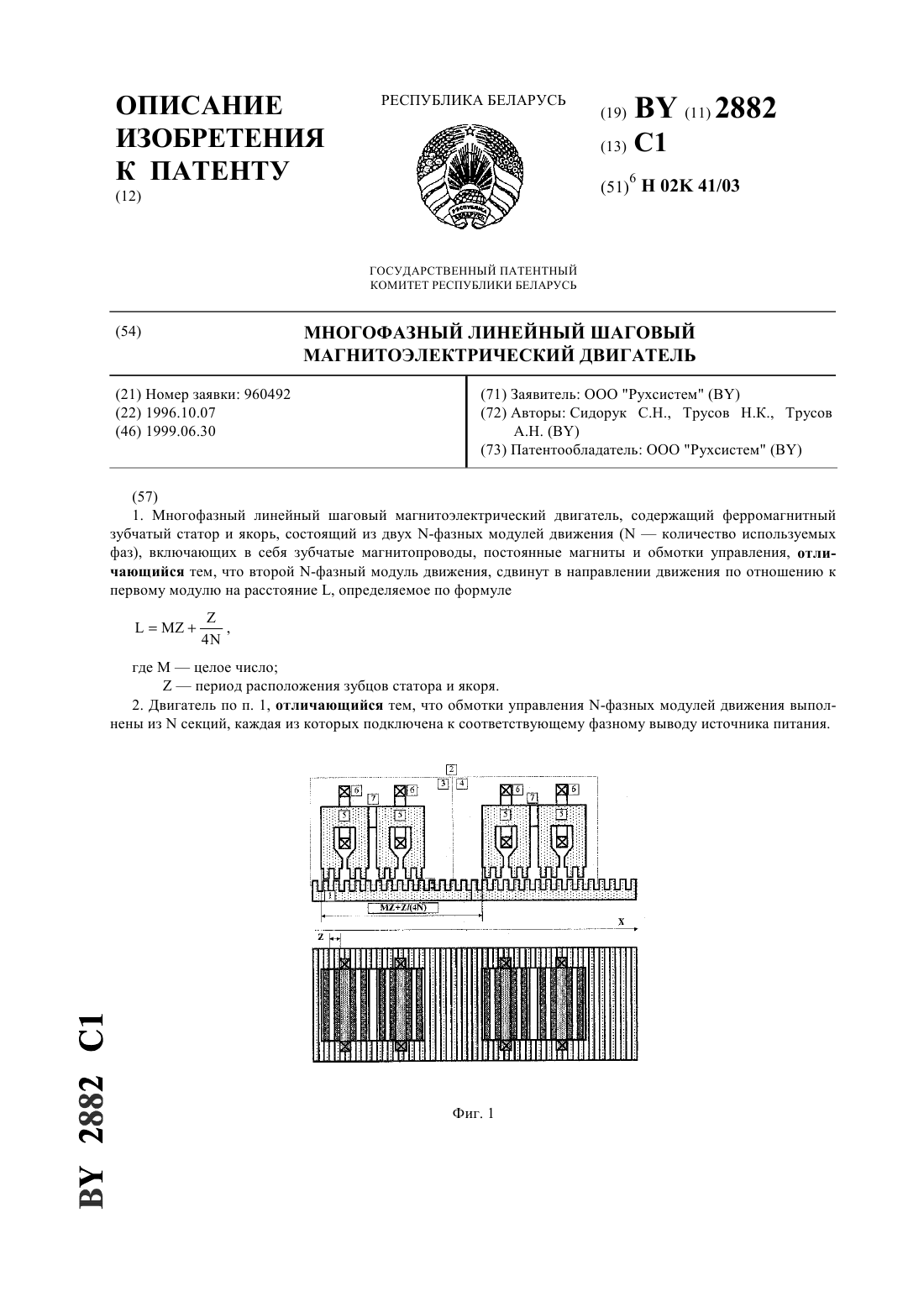
Номер патента: 2882
Опубликовано: 30.06.1999
Авторы: Трусов Николай Калистратович, Сидорук Сергей Николаевич, Трусов Алексей Николаевич
МПК: H02K 41/03
Метки: магнитоэлектрический, многофазный, линейный, шаговый, двигатель
Текст:
...фазному выводу источника питания, причем количество витков 1 в основной и 2- в дополнительных секциях каждого из модулей выбраны из соотношений На фиг. 1 показана принципиальная схема якоря многофазного линейного шаговою магнитоэлектрического двигателя, на фиг. 2, в качестве примера, векторные диаграммы м.д.с. фазных обмоток для двухфазного и на фиг. 3 для трехфазного двигателей, на фиг. 4 приведена схема соединения секций...
Многополюсный шаговый двигатель
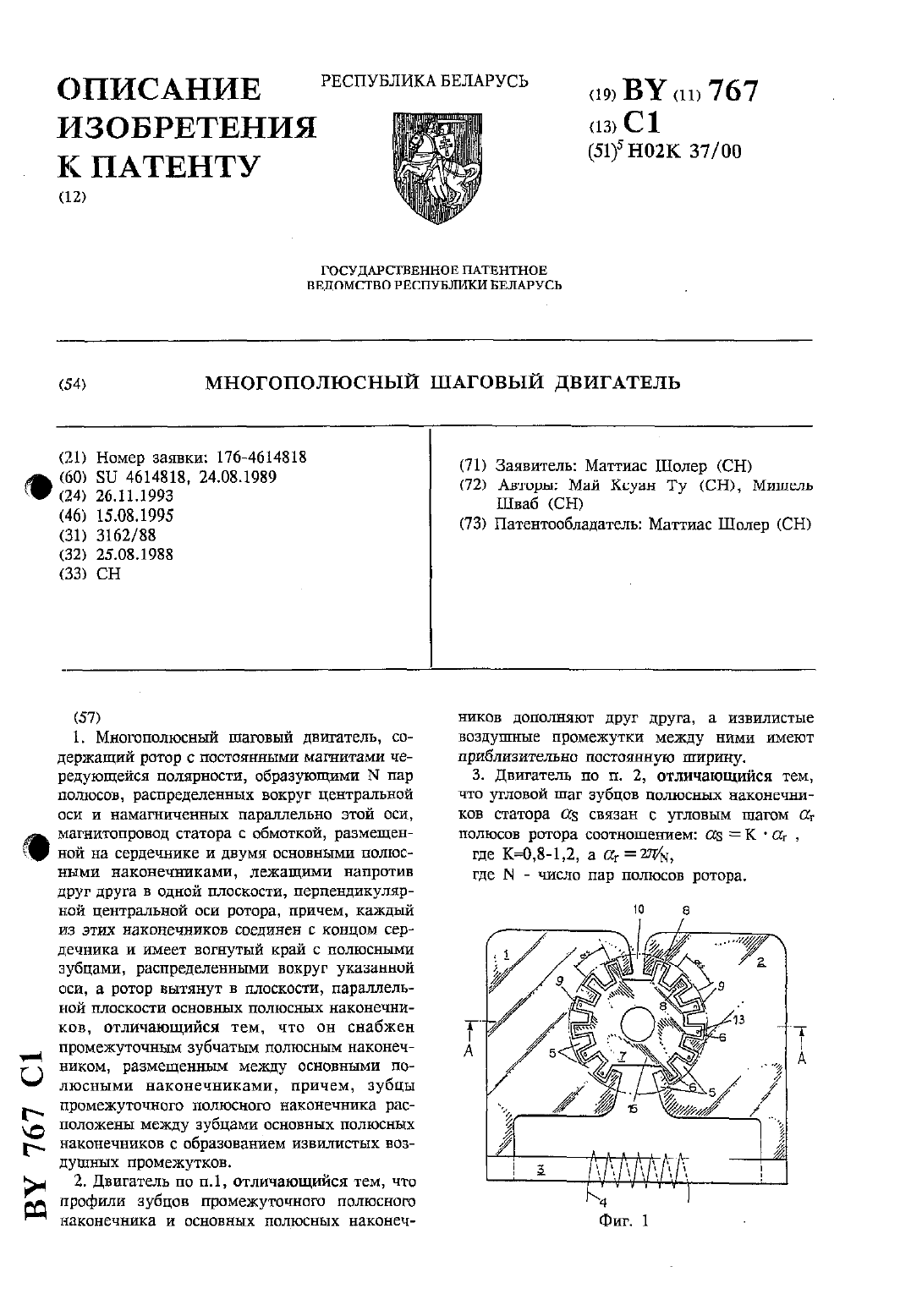
Номер патента: 767
Опубликовано: 15.08.1995
Авторы: Май Ксуан Ту, Мишель Шваб
МПК: H02K 37/00
Метки: двигатель, шаговый, многополюсный
Текст:
...кромку вогиут го вида, вырубленную с профилем, который имеет определенное число люсных зубцов 5. В случае, изображенном На фиг. 1, полюсные зубцЕ имеют трапециевидную форму и разделены промежуточными зонами 6, кр ки которых представляют собой сегменты дуги, сцентрированные на ос перпендикулярной и плоскости полюсных наконечиков 1 и 2.В описанном здесь варианте выполнения полюсные зубцы каждого обоих наконечников 1 и 2. образуют группу из семи...
Магнитоэлектрический двигатель
Номер патента: 7196
Опубликовано: 30.09.2005
Авторы: Счислёнок Сергей Владимирович, Счислёнок Владимир Никитич
МПК: H02N 11/00
Метки: магнитоэлектрический, двигатель
Текст:
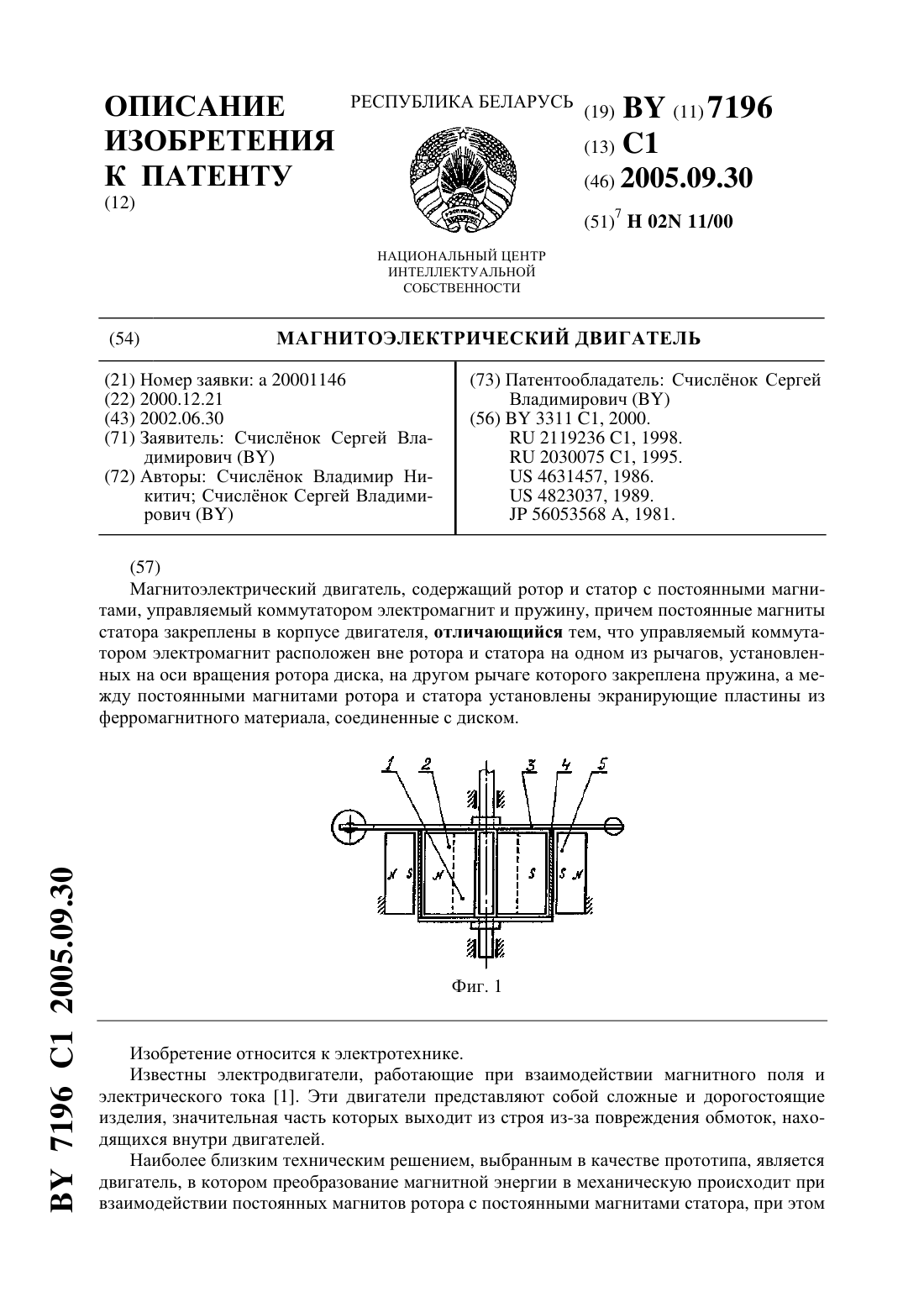
...коммутатором электромагнит расположен вне ротора и статора на одном из рычагов, установленных на оси вращения ротора диска, на другом рычаге которого закреплена пружина, а между постоянными магнитами ротора и статора установлены экранирующие пластины из ферромагнитного материала, соединенные с диском. Сущность изобретения поясняется чертежом, фиг. 1-3. Двигатель содержит ротор 1 из диэлектрического, диамагнитного или парамагнитного...
Предыдущий патент: Подвеска сиденья транспортного средства
Следующий патент: Режущий аппарат
Случайный патент: Компоновка низа бурильной колонны