Видеоадаптер радиолокационной обстановки
Номер патента: U 1197
Опубликовано: 30.12.2003
Авторы: Галуза Алексей Сергеевич, Онисимов Александр Валерьевич, Соколов Олег Андреевич
Текст
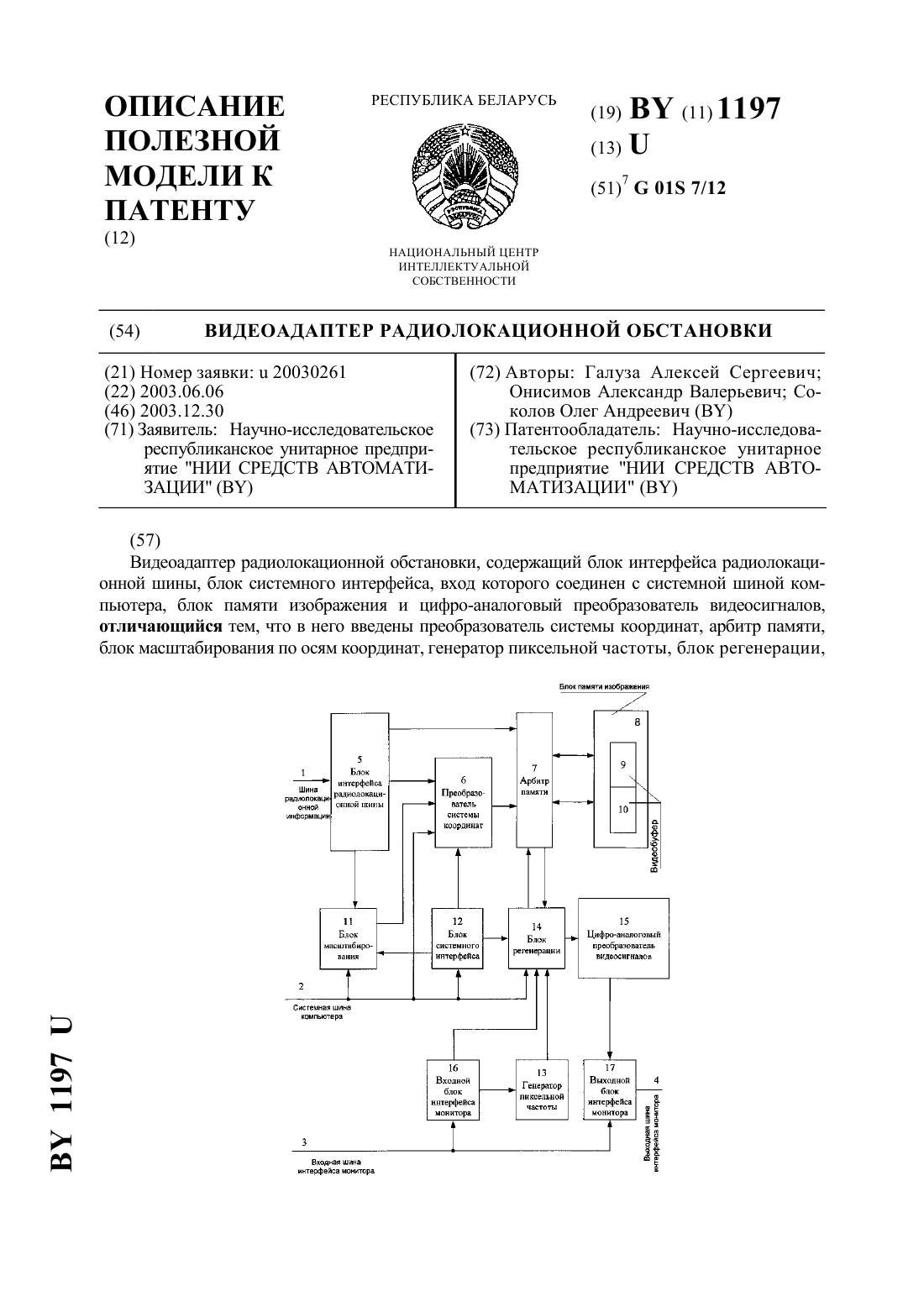
(71) Заявитель Научно-исследовательское республиканское унитарное предприятие НИИ СРЕДСТВ АВТОМАТИЗАЦИИ(72) Авторы Галуза Алексей Сергеевич Онисимов Александр Валерьевич Соколов Олег Андреевич(73) Патентообладатель Научно-исследовательское республиканское унитарное предприятие НИИ СРЕДСТВ АВТОМАТИЗАЦИИ(57) Видеоадаптер радиолокационной обстановки, содержащий блок интерфейса радиолокационной шины, блок системного интерфейса, вход которого соединен с системной шиной компьютера, блок памяти изображения и цифро-аналоговый преобразователь видеосигналов,отличающийся тем, что в него введены преобразователь системы координат, арбитр памяти,блок масштабирования по осям координат, генератор пиксельной частоты, блок регенерации,1197 входной блок интерфейса монитора, вход которого соединен со входной шиной интерфейса монитора, выходной блок интерфейса монитора, который соединен первой группой входов со входной шиной интерфейса монитора, второй группой входов с выходами цифро-аналогового преобразователя видеосигналов, а группой выходов соединен с выходной шиной интерфейса монитора, причем группа выходов блока интерфейса радиолокационной шины соединена с группой входов блока масштабирования по осям координат, группа выходов которого соединена с группой входов преобразователя системы координат, группа адресных выходов которого соединена с первой группой входов арбитра памяти, вторая группа входов которого соединена с группой выходов блока регенерации, группа входов данных которого соединена с группой выходов данных арбитра памяти, блок памяти изображения соединен с арбитром памяти, вход системной шины компьютера соединен с группами входов данных блока масштабирования по осям координат, преобразователя системы координат и блока регенерации, входы стробов данных которых раздельно соединены с выходами блока системного интерфейса.(56) 1. Патент 21005320, МПК 601 7/12, 1998. 2. Трусилов В. и др. Устройство совмещенного отображения радиолокационной и знакографической информации // Современные технологии автоматизации. - 1998. -1. - С. 88-90 (прототип). Полезная модель относится к вычислительной технике и может быть использована для отображения аналоговой информации от радиолокационной станции на мониторе современного компьютера с прямоугольным растром. По мере развития вычислительной техники появилась необходимость отображения на одном мониторе совмещенной радиолокационной обстановки, а именно первичной информации (отметки аналоговых эхо-сигналов от радиолокационной станции (РЛС и вторичной информации (картографический фон, знакографическая информация о скорости,высоте и т.д.), причем первичная и вторичная информации должны совмещаться по координатам. Известно радиолокационное устройство 1, содержащее индикатор, блок памяти,блок выборки, блок считывания и блок отклонения. Недостатком этого устройства является наличие специализированного индикатора со спиральной разверткой, что не позволяет совместить радиолокационное изображение со знакографической информацией компьютера, которое формируется для прямоугольной растровой развертки. Наиболее близким по технической сущности к предлагаемой полезной модели является устройство совмещенного отображения радиолокационной и знакографической информации 2, содержащее интерфейс радиолокационной магистрали, интерфейс ведущего процессора, интерфейс расширения графического адаптера, буфер радиолокационный,сигнальный процессор, радиолокационный процессор, буфер изображения, видеомультиплексор, цифро-аналоговый преобразователь видеосигналов. Недостатками прототипа являются возможность использования только при наличии компьютера с интерфейсом расширения чрезвычайно высокие требования к быстродействию тракта отображения, так как в нем используется та же пиксельная частота (через интерфейс расширения), что и в тракте изображения вторичной информации. Технической задачей предлагаемой полезной модели является совершенствование автоматизированного рабочего места диспетчера, например, по управлению воздушным движением. Поставленная задача решена при создании предлагаемой полезной модели с техническими результатами 1197 обеспечено совмещение и отображение двух изображений (первичной и вторичной информации) с различными пиксельными частотами на одном экране обеспечено снижение требований к быстродействию тракта отображения первичной информации обеспечено взаимодействие видеоадаптера с компьютерами без интерфейса расширения сняты ограничения на изображение вторичной информации (частоту регенерации,цветовую палитру и т.д.). Для достижения указанных технических результатов в предлагаемый видеоадаптер радиолокационной обстановки, содержащий блок интерфейса радиолокационной шины,блок системного интерфейса, вход которого соединен с системной шиной компьютера,блок памяти изображения и цифро-аналоговый преобразователь видеосигналов, введены преобразователь системы координат, арбитр памяти, блок масштабирования по осям координат, генератор пиксельной частоты, блок регенерации, входной блок интерфейса монитора, вход которого соединен со входной шиной интерфейса монитора, выходной блок интерфейса монитора, который первой группой входов соединен со входной шиной интерфейса монитора, второй группой входов соединен с выходами цифро-аналогового преобразователя видеосигналов, а группой выходов соединен с выходной шиной интерфейса монитора, причем группа выходов блока интерфейса радиолокационной шины соединена с группой входов блока масштабирования по осям координат, группа выходов которого соединена с группой входов преобразователя системы координат, группа адресных выходов которого соединена с первой группой входов арбитра памяти, вторая группа входов которого соединена с группой выходов блока регенерации, группа входов данных которого соединена с группой выходов данных арбитра памяти, блок памяти изображения соединен с арбитром памяти, вход системной шины компьютера соединен с группами входов данных блока масштабирования по осям координат, преобразователя системы координат и блока регенерации, входы стробов данных которых раздельно соединены с выходами блока системного интерфейса. Предлагаемая полезная модель представлена на чертеже в виде структурной схемы. Видеоадаптер радиолокационной обстановки содержит шину 1 радиолокационной информации от радиолокационной станции, системную шину 2 компьютера (например,), входную шину 3 интерфейса монитора, выходную шину 4 интерфейса монитора(например, ), блок 5 интерфейса радиолокационной шины, преобразователь 6 системы координат, арбитр 7 памяти, блок 8 памяти изображения, который состоит из видеобуферов 9 и 10, блок 11 масштабирования по осям координат, блок 12 системного интерфейса, генератор 13 пиксельной частоты, блок 14 регенерации, цифро-аналоговый преобразователь 15 видеосигналов, входной блок 16 интерфейса монитора, выходной блок 17 интерфейса монитора. Шина 1 предназначена для приема от РЛС следующих основных сигналов импульса запуска, определяющего момент посылки зондирующего импульса сигналов положения антенны (аналоговых или цифровых), характеризующих азимут зондирования воздушного пространства в горизонтальной или вертикальной плоскости аналоговых эхо-сигналов(один или несколько каналов), амплитуда которых характеризует яркость отметки, время задержки их относительно импульса запуска пропорционально дальности до объекта отражения. Шина 2, стандартная по составу цепей и дисциплине обмена, предназначена для обмена данными между видеоадаптером и компьютером. Шина 3 соединяет вход видеоадаптера с выходом графического адаптера компьютера на монитор. Шина 3 имеет стандартный набор цепей, в том числе кадровые (КС) и строчные (СС) синхронизирующие сигналы, аналоговые составляющие , , В изображения компьютера (вторичная информация), она не содержит цепей пиксельной частоты. 3 1197 Блок 5 интерфейса предназначен для приема сигналов с шины 1 и преобразования их в форму, удобную для обработки первичной информации другими блоками видеоадаптера. Преобразователь 6 системы координат преобразует координаты отметок эхо-сигнала из полярной в декартовую систему с учетом масштаба от блока 11, содержит программнодоступные компьютеру регистры координат точки стояния РЛС, регистр размерности матрицы изображения первичной информации по строке и столбцу, может быть выполнен на основе накапливающих сумматоров. Блок 11 масштабирования определяет частоту и величину шагов преобразования координат для преобразователя 6 системы координат, содержит память констант величин шагов преобразования (например, таблицыи), доступный компьютеру регистр масштабов, делители частоты. Блок 8 памяти, состоящий из видеобуферов 9 и 10, предназначен для хранения данных радиолокационной обстановки до их обновления. Видеобуферы 9 и 10 представляют собой двухмерные массивы ячеек, каждая из которых содержит текущую информацию для соответствующего пикселя изображения первичной информации (строки и столбцы массива соответствуют строкам и столбцам изображения). Арбитр 7 памяти предназначен для организации доступа по записи и чтению блокам 6 и 14 к видеобуферам 9 и 10. Блок 14 регенерации с участием арбитра 7 обеспечивает регенерацию изображения первичной информации в заданном окне вывода по содержимому блока 8 памяти. Блок 14 содержит регистры задержек изображения первичной информации по кадру и строкам и регистры размерности окна вывода по горизонтали и вертикали. Блок 14 может быть выполнен на основе счетчиков и регистров сдвига. Блок 12 системного интерфейса через системную шину 2 обеспечивает компьютеру доступ к регистрам блоков видеоадаптера для записи параметров, которые в дальнейшем управляют преобразованием и отображением радиолокационной информации, то есть блок 12 обеспечивает управление видеоадаптером со стороны компьютера. Генератор 13 формирует импульсы пиксельной частоты, фаза которых привязана к фронту строчного синхроимпульса от входного блока 16 интерфейса монитора. Входной блок 16 интерфейса монитора принимает строчные и кадровые синхросигналы с шины 3, анализирует их скважность, преобразует в единую форму для всех типов развертки и выдает на блоки видеоадаптера для синхронизации процессов. Блок 17 интерфейса комплексирует (например, суммирует) одноименные сигналы В от преобразователя 15 и шины 3 и выдает результат на выходную шину 4 интерфейса монитора, а также транслирует управляющие и синхронизирующие сигналы между шинами 3 и 4. Видеоадаптер выполняет следующие основные функции преобразование в заданном масштабе первичной информации (аналоговой информации от РЛС) из полярной системы координат в декартовую с записью в память отображение первичной информации из памяти в заданном окне кадра развертки совмещение изображений первичной и вторичной информации. Процессы преобразования координат и отображения информации несинхронные, используют общий ресурс память. По начальному запуску компьютер через системную шину 2 и блок 12 системного интерфейса записывает в блоки 6, 11 и 14 видеоадаптера значения различных параметров,которые в дальнейшем используются в процессах преобразования и отображения данных. При необходимости некоторые параметры (масштаб, положение точки стояния РЛС и т.д.) изменяются по желанию оператора в любое время работы видеоадаптера. Основные параметры, посредством которых осуществляется управление процессом отображения 1197 задержка начала окна отображения первичной информации от кадрового синхросигнала (количество строк, которые нужно пропустить до окна вывода) задержка начала отображения строк от строчного синхросигнала (количество пикселей от строчного сигнала до начала окна вывода) размер окна вывода по вертикали (1) и горизонтали (1) в пикселях первичной информации. Эти параметры записываются компьютером в блок 14 регенерации. Синхронизация процесса отображения первичной информации с отображением вторичной информации от компьютера производится кадровыми и строчными синхросигналами, которые поступают по шине 3 и преобразуются входным блоком 16 интерфейса монитора по полярности. В каждом кадре блок 14 регенерации отрабатывает заданные задержки окна вывода изображения первичной информации от кадрового и строчного синхросигналов, определяя таким образом моменты времени начала окна вывода по кадру и строкам. Во время развертки каждой строки окна вывода блок 14 регенерации последовательно считывает через арбитр 7 содержимое ячеек очередной строки двухмерного массива блока 8 памяти, преобразует его в код цветовой палитры и выдает через преобразователь 15, блок 17 интерфейса монитора и шину 4 на монитор. Выдача данных синхронизируется пиксельной частотой от генератора 13. Конец окна вывода по строкам и кадру определяется в блоке 14 регенерации по кодам 1 и 1 размерности матрицы изображения первичной информации. Процесс выдачи повторяется в каждом кадре. Один из двух видеобуферов 9 или 10 блока 8 памяти для чтения определяет арбитр 7, например, чередуя построчно видеобуферы 9 и 10 между процессами записи первичной информации и отображения. Возможны другие варианты распределения видеобуферов 9 и 10. Основной проблемой при отображении первичной информации в устройствах данного класса является обеспечение высокого быстродействия в тракте отображения (частота выдачи пикселей в строке сравнима с граничной частотой срабатывания логических элементов и соединителей). В связи с тем, что во входной шине 3 интерфейса монитора, в отличие от интерфейса расширения, используемого в прототипе, цепь пиксельной частоты отсутствует, в предложенном видеоадаптере генератором 13 формируется собственная пиксельная частота, используемая для выдачи пикселей в строке. Это позволяет, с одной стороны, снизить ее до уровня, достаточного для устойчивого срабатывания элементов тракта отображения первичной информации, что снимает проблему высокого быстродействия этого тракта. С другой стороны, различие пиксельных частот при формировании изображений первичной и вторичной информации усложняет процесс совмещения этих изображений в строках, поскольку нарушается синхронность выдачи пикселей в строках двух изображений. Проблема совмещения в видеоадаптере решается в процессе преобразования системы координат и записи отметок эхо-сигналов в память путем учета отношения пиксельных частот в масштабе изображения первичной информации, что компенсирует различие пиксельных частот. Основные параметры, посредством которых компьютер управляет процессом преобразования координат в преобразователе 6 системы координат - декартовые координаты ХС 1 и 1 точки стояния РЛС и размер матрицы изображения первичной информации (1 и 1 - размер окна вывода по вертикали и горизонтали соответственно) в блоке 11 масштабирования - масштаб по координатам ( и ). Значения ХС 1 и 1, 1 и 1 - в пикселях изображения первичной информации,и- в единицах длины на пиксель. Процесс преобразования координат и записи в блок 8 памяти ведется по мере поступления радиолокационной информации от РЛС и состоит в следующем. Поступающие эхосигналы преобразуются блоком 5 интерфейса из аналоговой формы в цифровую и выставляются на вход арбитра 7 памяти. Адрес памяти для записи данных формируется блоком 5 5 1197 и преобразователем 6 под управлением блока 11 масштабирования, который задает величину и частоту шагов преобразования координат. При этом блок 5 интерфейса преобразует сигналы положения антенны в цифровой код азимута синхронно с вращением антенны и передает на преобразователь 6, в котором по каждому импульсу запуска с блока 5 фиксируется текущий код азимута и формируется последовательность адресов двухмерного массива ММ (, ) ячеек памяти по формулам 1, где ММ(Х) и- адрес ячейки в строке и столбце массива памяти соответственнои- дальность и азимут (полярные координаты) отметки эхо-сигнала ХС 1 и 1 - координаты точки стояния РЛС в пикселях первичной информации относительно верхнего левого угла окна выводаи- масштаб изображения первичной информации по осям координати . Взаимосвязь параметров для формул ММ(Х),с параметрами изображения вторичной информации 1 12 2,1 где ХС 2, 2 - координаты точки стояния РЛС в пикселях вторичной информации М 2 - масштаб изображения вторичной информации 1 и 2 - пиксельные частоты изображений первичной и вторичной информации. Полученная с преобразователя 6 последовательность адресов коммутируется арбитром 7 на адресные входы одного из видеобуферов 9 или 10 блока 8 памяти. На каждом шаге преобразования преобразователь 6 формирует управляющие сигналы записи на арбитр 7 памяти, по которым коды эхо-сигналов от блока 5 записываются в блок 8 памяти по текущему адресу двухмерного массива (,). Частота шагов преобразования задается блоком 11 масштабирования и обратно пропорциональна масштабами . В процессе преобразования координат с записью в память за один оборот антенны содержимое ячеек двухмерного массива памяти полностью обновляется, причем характеристики отметок эхо - сигналов записываются в массив по адресам, пропорциональным декартовым координатам отметок эхо - сигналов с учетом точки стояния РЛС и отношения пиксельных частот 1 и 2. Совмещение изображений первичной и вторичной информации осуществляется совместно в процессах преобразования координат и отображения. В отображении обеспечивается синхронность и синфазность формирования двух изображений по началу кадра и началу строк. В процессе преобразования координат учитывается отношение частот 1 и 2 в масштабе по оси координаты , что обеспечивает в строках двух изображений равную скорость выдачи радиолокационной обстановки (в единицах длины на единицу времени). Одной из проблем устройств подобного класса является сопряжение с компьютерами различных поколений, с различными размерностями разверток и частотами регенерации изображения, что связано с различием пиксельной частоты изображения вторичной информации. Адаптация предлагаемого видеоадаптера в этих случаях сводится к пересчету в компьютере параметров управления для висельная частота 1 видеоадаптера остается неизменной, на параметры изображения вторичной информации ограничения не накладываются. 1197 Таким образом, предлагаемый видеоадаптер обеспечивает преобразование системы координат из полярной в декартовую, формирование изображения первичной информации с собственной пиксельной частотой и совмещение его с изображением вторичной информации. Предлагаемое техническое решение видеоадаптера радиолокационной обстановки позволило усовершенствовать автоматизированное рабочее место диспетчера путем улучшения его технико-эксплуатационных характеристик. Применение видеоадаптера радиолокационной обстановки возможно как в современных компьютерах, так и, в перспективе, в компьютерах следующих поколений. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 7
МПК / Метки
МПК: G01S 7/12
Метки: видеоадаптер, радиолокационной, обстановки
Код ссылки
<a href="https://by.patents.su/7-u1197-videoadapter-radiolokacionnojj-obstanovki.html" rel="bookmark" title="База патентов Беларуси">Видеоадаптер радиолокационной обстановки</a>
Система регистрации дорожной обстановки
Номер патента: U 738
Опубликовано: 30.12.2002
Автор: Руденко Максим Игоревич
МПК: G08G 1/04
Метки: регистрации, дорожной, обстановки, система
Текст:
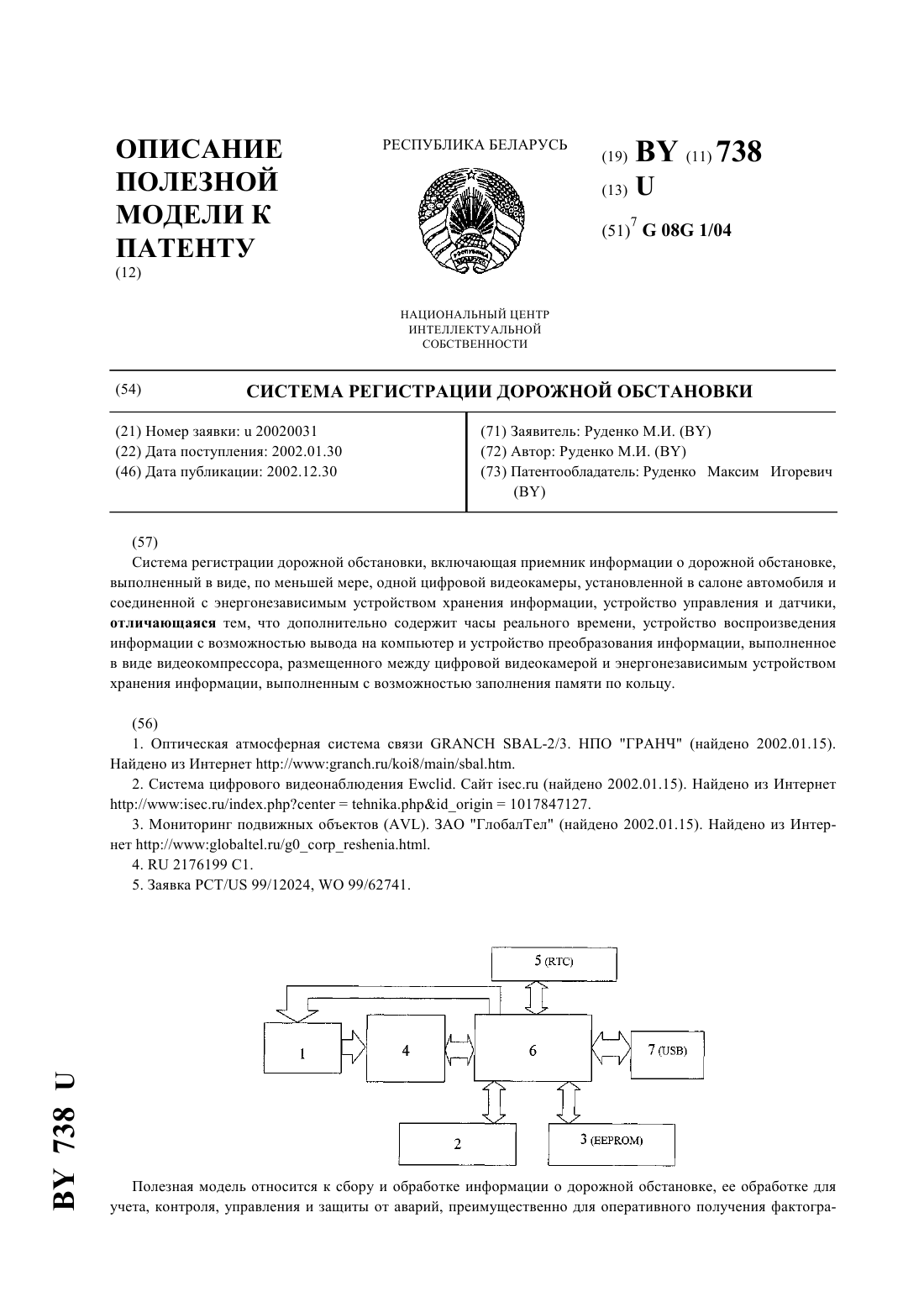
...габаритов устройства для хранения информации и делает систему достаточно громоздкой и дорогостоящей. Кроме того,носитель информации в такой системе может быть поврежден или уничтожен во время дорожнотранспортного происшествия, что снижает надежность работы системы. Таким образом, задачей данной полезной модели является создание надежной и эффективной системы регистрации дорожной обстановки. Предлагаемая система обеспечивает непрерывное...
Устройство контроля параметров качества электроэнергии
Номер патента: U 383
Опубликовано: 30.12.2001
Авторы: Короленко Владимир Анатольевич, Кудлай Евгений Андреевич, Нагорный Дмитрий Олегович, Онисимов Александр Валерьевич
МПК: G01R 19/25
Метки: контроля, устройство, качества, электроэнергии, параметров
Текст:
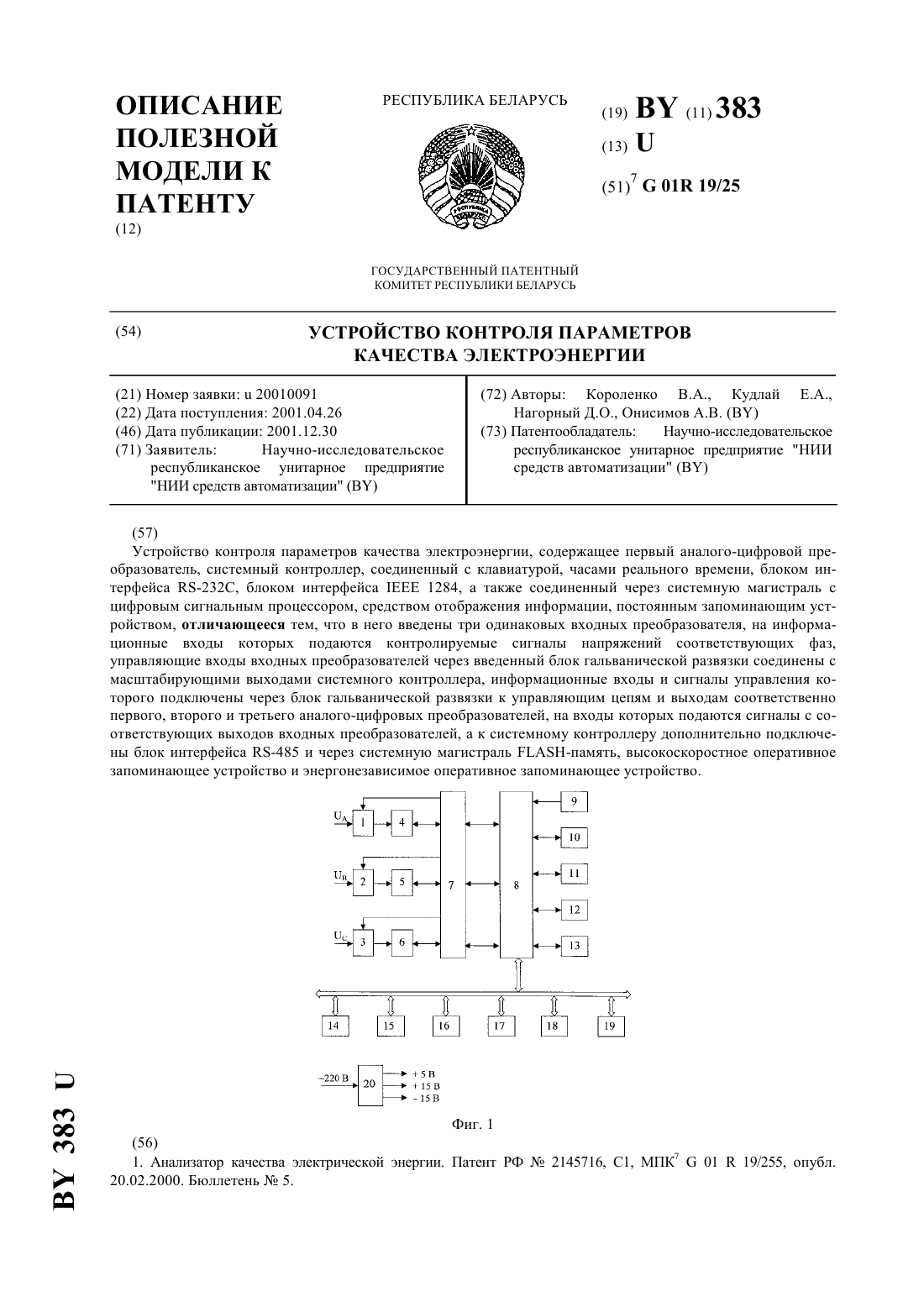
...сети. Предлагаемое решение позволит расширить номенклатуру средств измерений параметров качества электроэнергии. Указанный технический результат достигается тем, что в устройство контроля параметров качества электроэнергии, содержащее первый аналого-цифровой преобразователь, системный контроллер, соединенный с клавиатурой, часами реального времени, блоком интерфейса -232, блоком интерфейса 1284, а также соединенный через системную...
Внутрисхемный эмулятор
Номер патента: 5494
Опубликовано: 30.09.2003
Авторы: Федорцов Алексей Олегович, Долинский Михаил Семенович
МПК: G06F 9/44
Метки: внутрисхемный, эмулятор
Текст:
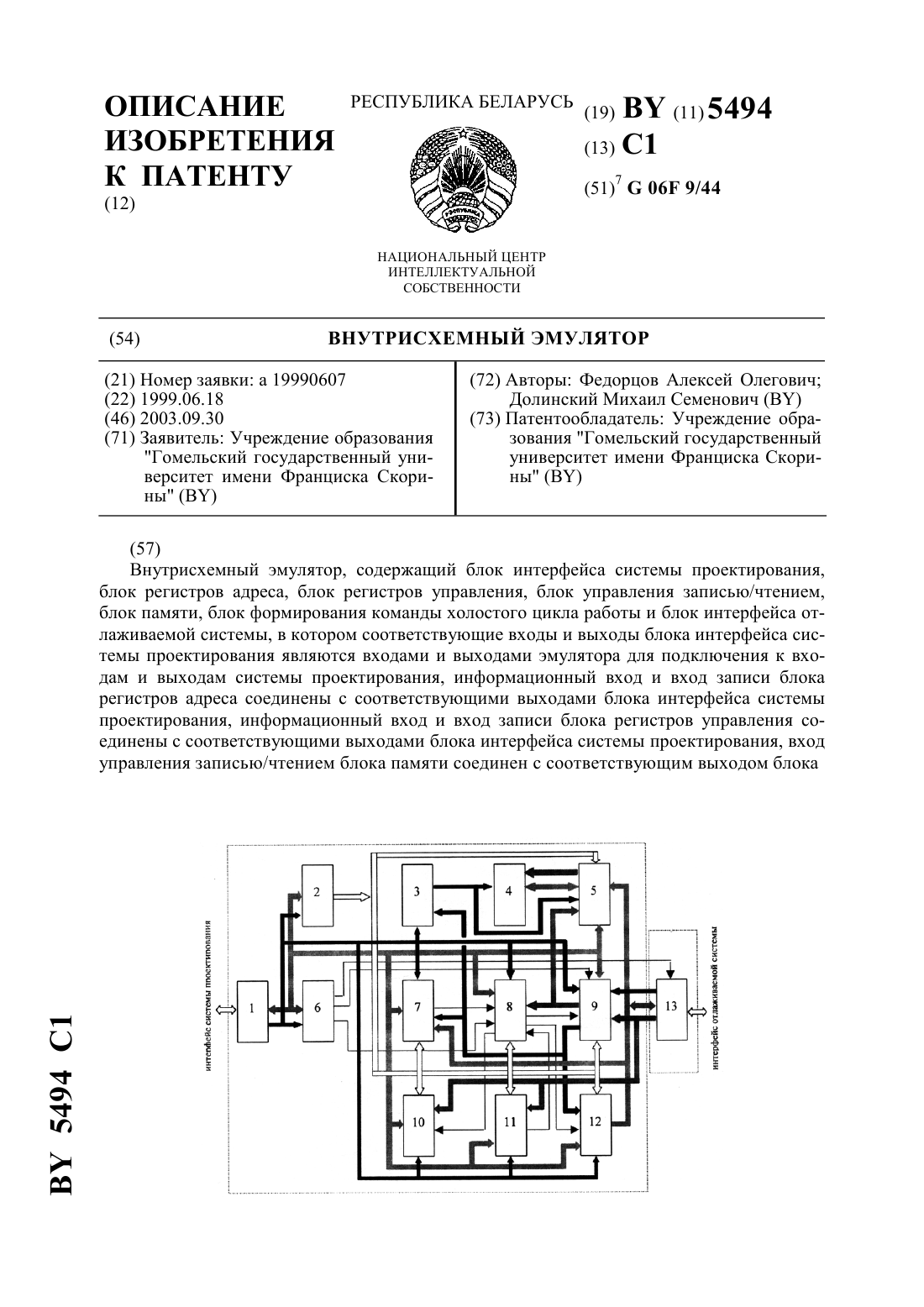
...чтение внутренних регистров микроконтроллера (в том числе указателя стека и счетчика команд), а также внешних ресурсов (памяти, устройств ввода-вывода). В случае необходимости изменить состояние некоторых ресурсов эмулятора монитор соответствующим образом модифицируется. Для организации режима выполнения отлаживаемой программы с точками останова и пошагового режима используется анализатор кода. Весьма полезным для отладки является пошаговый...
Преобразователь перемещения в код
Номер патента: 921
Опубликовано: 15.12.1995
Авторы: Хациревич Владимир Григорьевич, Ярмош Николай Адамович, Кулешов Аркадий Яковлевич, Подберезский Григорий Николаевич, Леонович Эдуард Николаевич, Вопнярский Владимир Иосифович
МПК: H03M 1/30
Метки: код, преобразователь, перемещения
Текст:
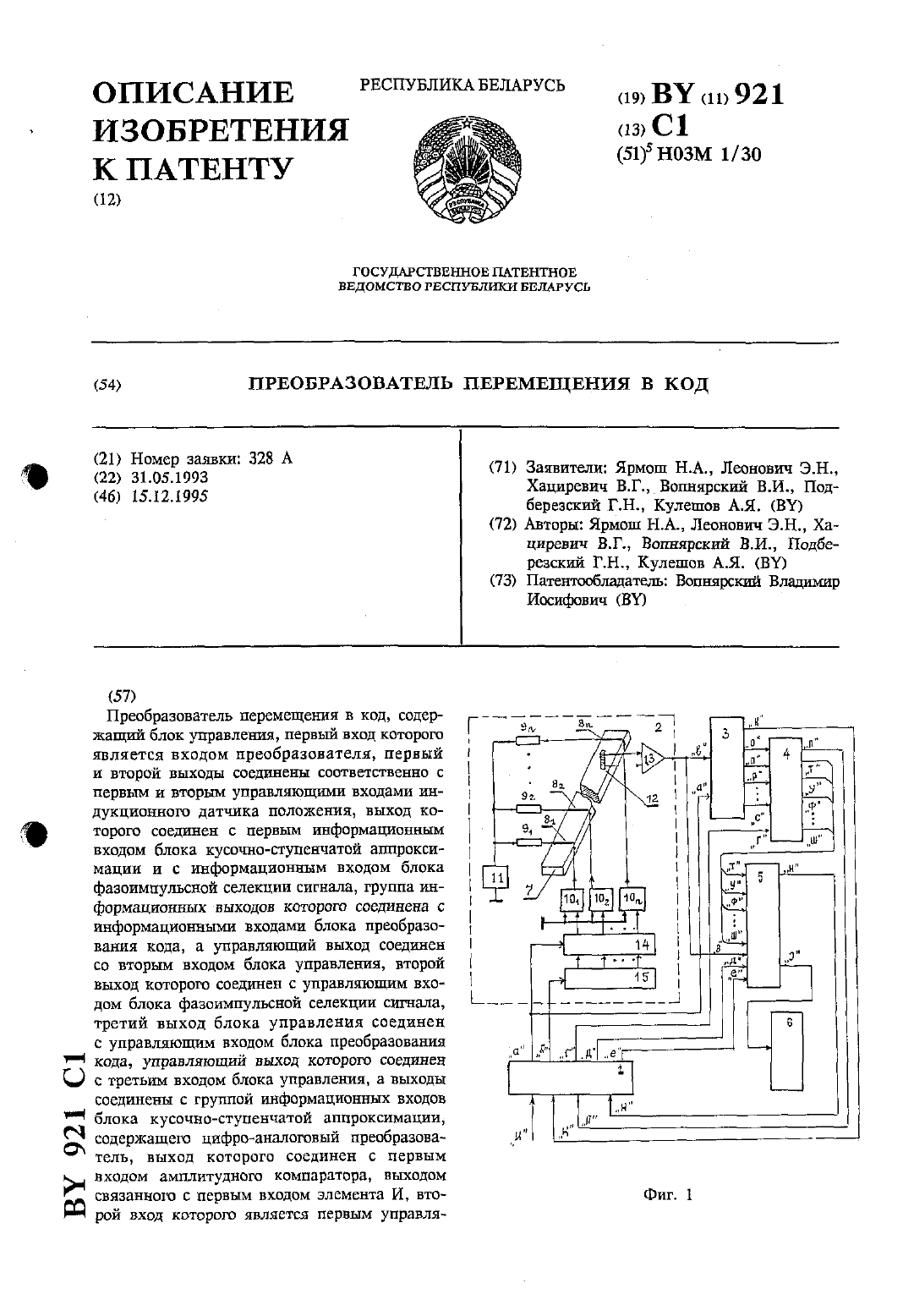
...входом нреоораеоват телн, а третий и четвертый выходы соединены соответственно со вторым управляющим входом блока поддиапавонных аналогошцифрб вых преобразователей и с управляющим входом блока преооразовае ния кода, выходы которого соединены с информационными входами блока поддиапаеонных аНалогоцифровых преобразователей, блокЭЗОЩШУЛЬСНОЙ СЭЛЭНШПЕ СЧИГНЭЛЭ, ГРУППЕ БЫХОДОБ КОТОРОГО СОВдинеыа с информационными входами блока преобразования...
Устройство управления буферной памятью
Номер патента: 1191
Опубликовано: 14.06.1996
Авторы: Фельдман Владимир Марткович, Коваленко Сергей Саввич, Зайцев Александр Иванович, Пентковский Владимир Мстиславович
МПК: G06F 12/08
Метки: устройство, памятью, управления, буферной
Текст:
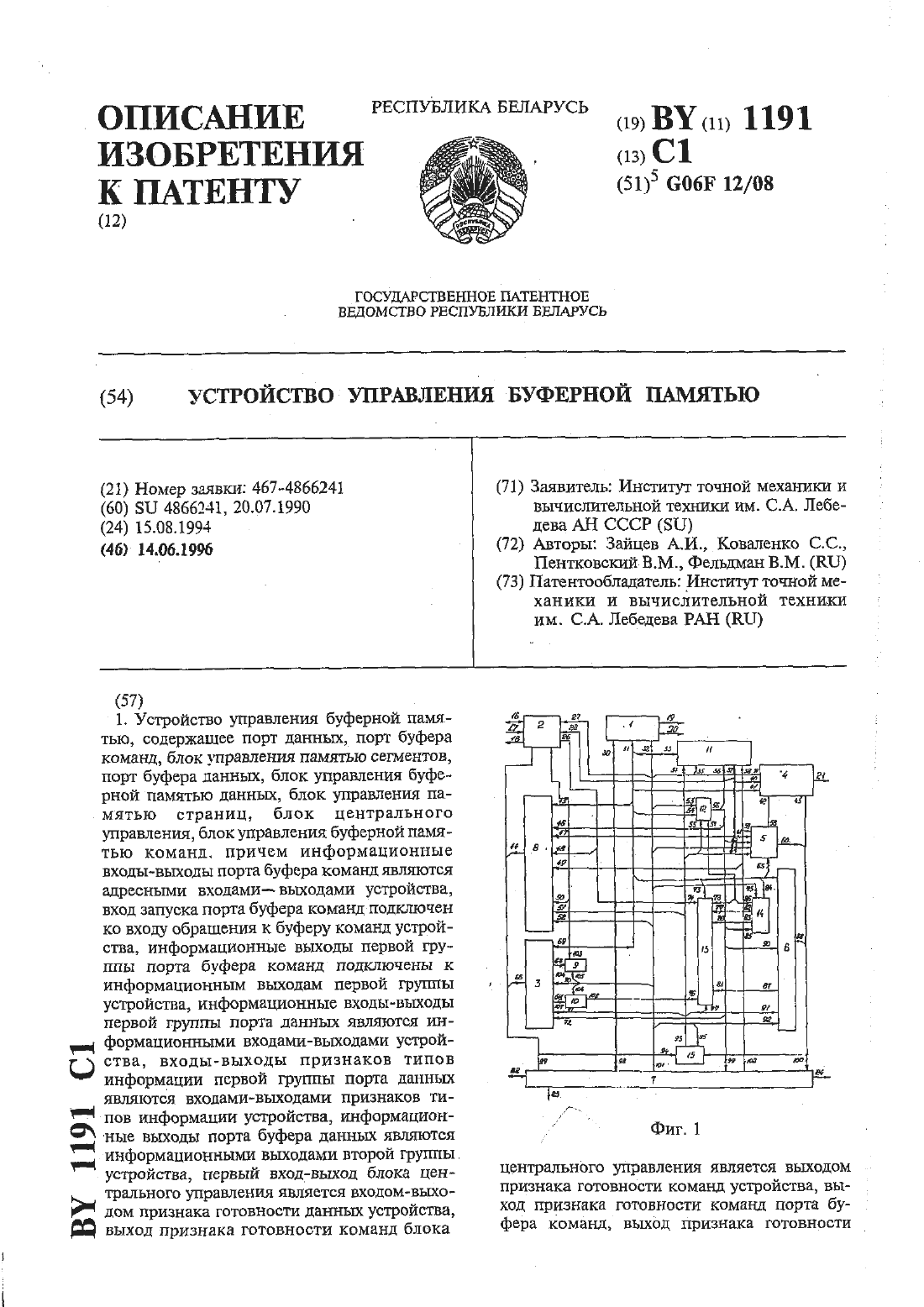
...второго мультиплексора адреса подключены к адресным входам второй группы соответственно первого, второго, третьего и четвертого узлов памяти адресных признаков и адресному входу второго мультиплексора данных, выход формирователя признаков значимости подключен к адресным входам третьейгруппы первого, второго, третьего и четвертого узлов памяти адресных признаков, выход мультигшексора данных признаков старения соединен с информационным входом...
Предыдущий патент: Устройство для получения покрытий на внутренние поверхности деталей
Следующий патент: Крышка из эластичного материала
Случайный патент: Автомобильная цистерна для перевозки жидких грузов