Способ измерения приведенного периода свободных колебаний маятника
Текст
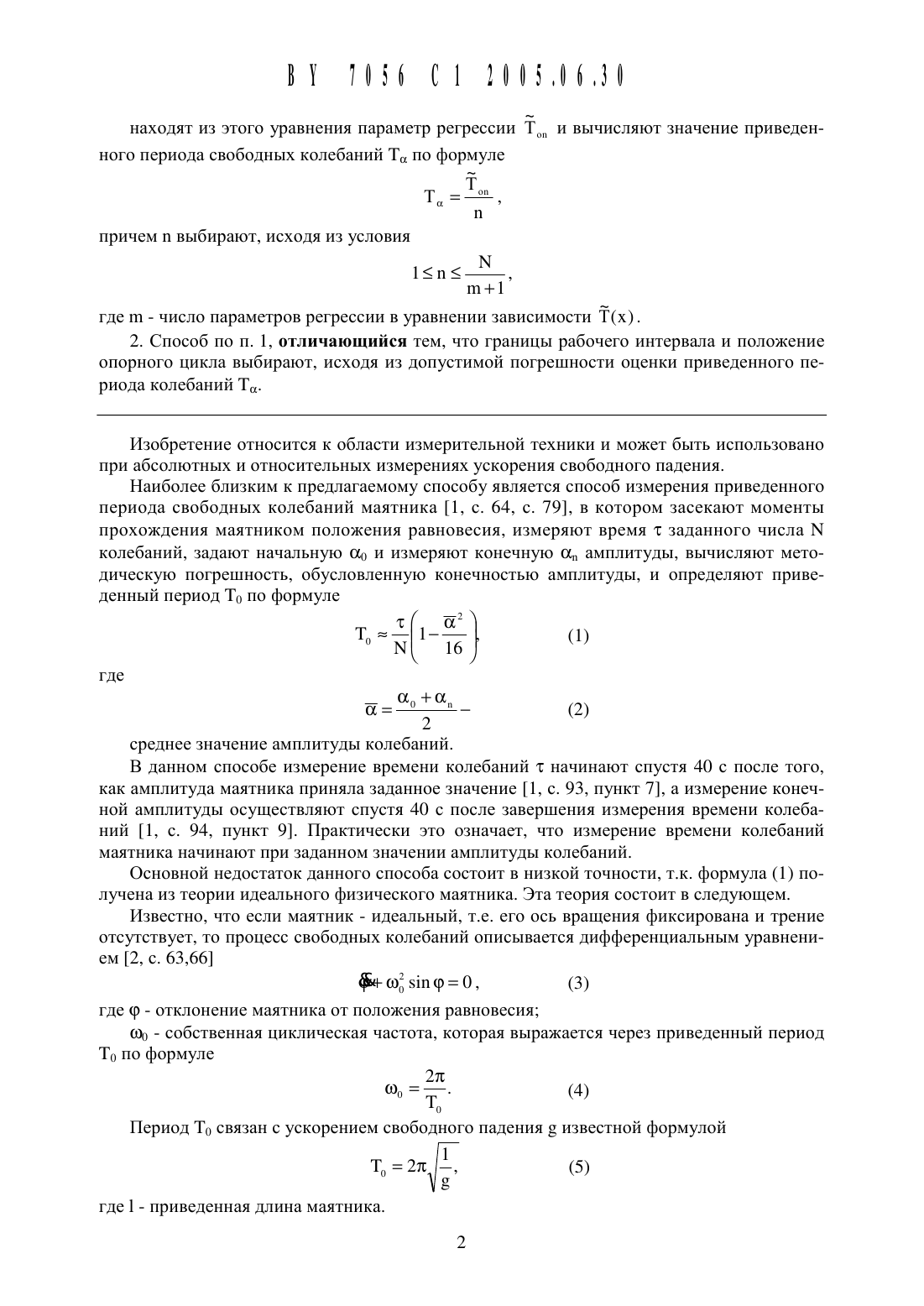
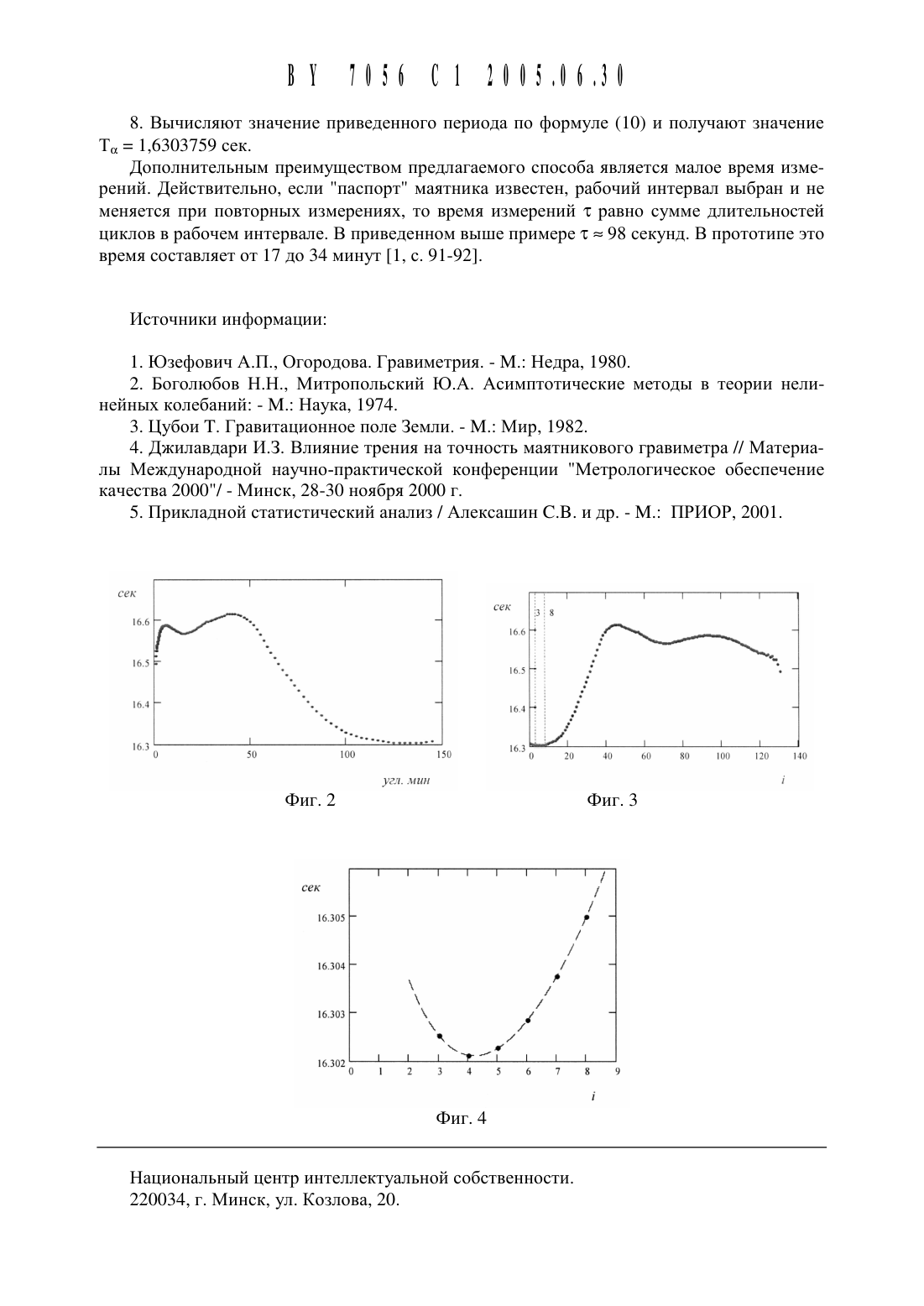
находят ИЗ ЭТОГО уравнения параметр регрессии Топ И ВЫЧИСЛЯЮТ ЗНЗЧВНИВ ПрИВСДСН ного периода свободных колебаний Та по формулеп причем п выбирают, исходя из условия 1 5 п 5 А , ш 1где ш - число параметров регрессии в уравнении зависимости Т(х).2. Способ по п. 1, отличающийся тем, что границы рабочего интервала и положение опорного Цикла выбирают, исходя из допустимой погрешности оценки приведенного периода колебаний Та.Изобретение относится К области измерительной техники и может быть использовано при абсолютных и относительных измерениях ускорения свободного падения.Наиболее близким к предлагаемому способу является способ измерения приведенного периода свободных колебаний маятника 1, с. 64, с. 79, в котором засекают моменты прохождения маятником положения равновесия, измеряют время т заданного числа Ы колебаний, задают начальную оса и измеряют конечную щ амплитуды, вычисляют методическую погрешность, обусловленную конечностью амплитуды, и определяют приведенный период То по формулеОС ОС аг 2 2среднее значение амплитуды колебаний.В данном способе измерение времени колебаний т начинают спустя 40 с после того,как амплитуда маятника приняла заданное значение 1, с. 93, пункт 7, а измерение конечной амплитуды осуществляют спустя 40 с после завершения измерения времени колебаний 1, с. 94, пункт 9. Практически это означает, что измерение времени колебаний маятника начинают при заданном значении амплитуды колебаний.Основной недостаток данного способа состоит в низкой точности, т.к. формула ( 1) получена из теории идеального физического маятника. Эта теория состоит в следующем.Известно, что если маятник - идеальный, т.е. его ось вращения фиксирована и трение отсутствует, то процесс свободных колебаний описывается дифференциальным уравнени ем 2, с. 63,66 е-0)51 п(рО, (3) где (р - отклонение маятника от положения равновесия(до - собственная циклическая частота, которая выражается через приведенный период То по формулеО) 4 0 ТО - Период То связан с ускорением свободного падения 3 известной формулойВ данном способе под периодом То понимают период, которым обладал бы идеальный маятник, амплитуда ос колебаний которого бесконечно мала (ос О). Существующие способы измерения 3 с помощью маятниковых гравиметров, так или иначе связаны с оценкой периода То. Однако этот период непосредственно измерить нельзя.Из теории колебаний следует, что при конечной (но малой) амплитуде колебаний период идеального маятника зависит от амплитуды по формуле 2, с. 66)т 1 т т 1 ос 2 1 16 (6) 16 В данном способе, период То выражают через период Т по формуле 1 1 ТТТос 2 Т 1 ос 2 (7) 16 16Вследствие потерь энергии на трение амплитуда колебаний маятника постепенно уменьшается И период маятника изменяется. В описываемом способе В качестве периодаТ колебании Т ИСПОЛЬЗУЪОТ его среднее за время колебании значение Тор . Подставляя Ввместо периода Т значение Тср И вместо амплитуды (Х ее среднее значение ОС, получа ют формулу (1). Величину ч б (8)рассматривают как методическую погрешность и называют поправкой к периоду за амплитуду 1, с. 64. С помощью этой поправки средний период колебаний маятника приводят к значению периода при ос О.Погрешность формулы (1), в первую очередь, обусловлена тем, что параболическая зависимость (6) периода Т от амплитуды ос, на самом деле, не наблюдается. В реальном маятниковом гравиметре ось вращения маятника не фиксирована. Здесь опорой маятника является опора качения. Она изначально имеет сложную непредсказуемую геометрию,множество дефектов 1, с. 69 и деформируется под действием веса маятника. В процессе качаний маятника имеет место проскальзывание подвижной и неподвижной поверхностей опоры относительно друг друга и их износ 1, с. 70 3, с. 39.Кроме того, как показано в 4, при вычислении периода То замена амплитуды ее средним значением также вносит дополнительные погрешности в оценку приведенного периода. Здесь необходимо учитывать закон затухания амплитуды 010).Указанные причины приводят к тому, что динамика реального маятника существенно отличается от динамики идеального физического маятника. Более того, эта динамика постепенно может изменяться и в процессе колебаний. Реальное поведение маятника трудно предсказать с высокой точностью. При исследовании маятников различных типов обнаружилось, что теоретическая поправка за амплитуду не полностью исправляет период колебаний, и существует остаточное влияние амплитуды, индивидуальное у разных маятников и достигающее нескольких десятков единиц 1 О 8 с в рабочем диапазоне амплитуд 1, с. 64-65.Единственным методом определения реальной зависимости Т от ос может быть только ее экспериментальное определение. В данном способе эта возможность отсутствует.Отсутствие возможностей получить сведения о реальной зависимости Т от ос в прототипе не позволяет следить за изменениями динамических свойств маятника от опыта к опыту, например, вследствие износа и изменения характера трения. В данном способе чтобы учесть эти изменения, периодически возвращаются на исходный пункт для повторных наблюдений, а сами наблюдения выполняют не с одним маятниковым прибором,а с комплектом из трех-пяти приборов, повторяют гравиметрическую связь независимоНесколько раз 1, с. 63. Очевидно, что это приводит К значительным Дополнительным затратам времени и финансов.Из сказанного следует, что по существу данный способ основан на некорректной экстраполяции среднего значения периода колебаний маятника, измеренного в некотором интервале конечных значений амплитуд ос (в прототипе ос 30-40 угл. минут), к значению периода при ос О, т.е. к значению, где зависимость Т(ос) не известна и не может быть измерена. Теория этого способа и расчетные формулы построены на модели идеального физического маятника, далекой от реальной модели.Задачей изобретения является увеличение точности измерений приведенного периода свободных колебаний маятника.Решение поставленной задачи обеспечивается тем, что в известном способе измерения приведенного периода свободных колебаний маятника, включающем сообщение маятнику свободных колебаний, задание начальной амплитуды колебаний и фиксацию начального и конечного моментов прохождения маятником положения равновесия, дополнительноизмеряют длительности Та последовательных циклов колебаний, каждый из которых включает заданное количество п колебаний,выбирают рабочий интервал значений Тд , включающий Ы колебанийвыбирают один из циклов в рабочем интервале в качестве опорногостроят экспериментальную зависимость длительности цикла колебаний от номера циклааппроксимируют эту зависимость решением уравнения регрессии вида1 - номер опорного цикла Цх-йоп) - функция, вид которой выбирается из соображений достижения необходимойТОЧНОСТИ ОЦСНКИ параметра Топнаходят ИЗ ЭТОГО уравнения параметр регрессии Топ И ВЫЧИСЛЯЮТ ЗНЗЧСНИС ПрИВСДСН ного периода колебаний Та по формулеТа . (10) п причем п выбирают из условия М 1 п Т, (11) ш 1ГДС Ш - ЧИСЛО параметров рСГрСССИИ В уравнении зависимости Т В частности, В ПРСДЛЗГЗСМОМ СПОСОбС границы рабочего интервала И ПОЛОЖСНИС ОПОрНОГО цикла выбирают, ИСХОДЯ ИЗ ДОПУСТИМОЙ ПОГрСШНОСТИ ОЦСНКИ ПрИВСДСННОГО периода То. ИЗМСРСНИС ДЛИТСЛЬНОСТСЙ последовательных ЦИКЛОВ колебаний (ОНИ показаны нафиг. 1 и обозначены как Т 1, Т 2, Т 3,) позволяет установить характер изменения длитель НОСТСЙ ЦИКЛОВ В НСКОТОрОМ диапазоне ИЗМСНСНИЯ амплитуды колебаний И провести сравНИТСЛЬНЫЙ анализ различных участков ИЗМСНСНИЯ ЭТИХ ЦИКЛОВ.ИЗМСрСНИС ДЛИТСЛЬНОСТСЙ ЦИКЛОВ колебаний, каждый ИЗ КОТОрЫХ включает ЗЗДЭННОС КОЛИЧССТВО П колебаний, ПОЗВОЛЯСТ ОбССПСЧИТЬ статистическую независимость СОССДНИХ ИЗМСРЯСМЫХ ЦИКЛОВ. ЗНЗЧСНИЯ же СОССДНИХ ПСрИОДОВ КОЛСОЗНИЙ коррелированнь 1 МСЖДУ СОбОЙ. ДСЙСТВИТСЛЬНО, ССЛИ представить, ЧТО В какой ТО МОМСНТ ВРСМСНИ маятник ПОЛУЧИЛ ТОЛЧОК ВСЛСДСТВИС вибраций основания, ТО амплитуда И ДЛИТСЛЬНОСТЬ данного И ПОСЛСДУЮЩИХ ПСрИОДОВ ИЗМСНЯТСЯ. В случае же ИЗМСрСНИЯ ДЛИТСЛЬНОСТСЙ ЦИКЛОВ, включаю 4ЩИХ НССКОЛЬКО ПСРИОДОВ, КОррСЛЯЦИЯ МСЖДу периодами разрушится ПОД ДСЙСТВИСМ ДРУГИХ ТОЛЧКОВ.Статистическая НСЗЗВИСИМОСТЬ СОССДНИХ ЦИКЛОВ колебаний увеличивает ТОЧНОСТЬ ОЦСНКИ ПрИВСДСННОГО периода.Рабочий Интервал значений Т. включает несколько циклов колебаний (и, естественно, 1несколько значений Тд). Выбор именно рабочего интервала позволяет из всей сложнойкривой зависимости Та от номера цикла 1 или от амплитуды ос (см. фиг. 2-3) выбрать тот участок, где разброс значений Т минимален (т.е. зависимость Та от 1 максимально гладкая)И ГДС СВЯЗЬ МСЖДИМОЖНО описать П ОСТОЙ аналитической зависимостью наиболее 1точно. Это позволяет существенно увеличить точность оценки приведенного периода колебаний.ВЫбОр ОДНОГО ИЗ ЦИКЛОВ рабочего интервала ЗНЗЧСНИЙВ качестве ОПОрНОГО ПОЗВО 1ляет привести период колебаний к наиболее предпочтительной точке рабочего интерва ла, например, в которой зависимость Тд от 1 является наиболее стабильной.Определение в рабочем интервале закона зависимости Т(х)Тш 1 Г (х 1 О) дли ТСЛЬНОСТИ ЦИКЛОВ Та КОЛСОЗНИЙ ОТ ИХ номера МСТОДОМ рСГрСССИОННОГО анализаПОЗВОЛЯСТ УВСЛИЧИТЬ ТОЧНОСТЬ ИЗМСрСНИЯ ДЛИТСЛЬНОСТИ ОПОрНОГО цикла, Т.К. значение параметрарегрессии ТО представляет собой улучшенную (уточненную) оценку длительности этогоцикла. ДСЙСТВИТСЛЬНО, процедура ИЗМСрСНИЯ ДЛИТСЛЬНОСТСЙкаждого ИЗ ЦИКЛОВ пред 1ставляет собой единичное измерение. Погрешность этого измерения определяется, главным образом, погрешностью оптоэлектрического датчика и уровнем вибраций основания. Использование процедуры регрессионного анализа позволяет заменить процедуру единичных измерений процедурой многократных измерений, поскольку уравнение регрессии позволяет установить детерминированную связь между длительностями соседних циклов с помошью уравнения регрессии (9) и уменьшить влияние случайных погрешностей за счет их усреднения.Вид функции Г(х) вытекает из положения опорного цикла в рабочем интервале значе НИЙ Та, выбранного метода анализа, например, ИЗ ЛИНСЙНОСТИ ИЛИ НСЛИНСЙНОСТИ уравнеНИЯ регрессии, а также ИЗ НСООХОДИМОЙ ТОЧНОСТИ ОЦСНКИ ЗНЗЧСНИЯ параметра Та .Определение зависимости Т (х) позволяет установить индивидуальное уравнение динамики для каждого маятника и следить за этой динамикой при каждом измерении. Изменение вида этой зависимости будет свидетельствовать о нарушении установленного режима измерений. Уравнение (9) можно рассматривать как паспорт каждого маятника.Помимо параметра То, уравнение (9) может содержать еше несколько параметроврегрессии, значения которых находятся с помошью метода наименьших квадратов.Вычисление приведенного периода колебаний маятника по формуле (10) является очевидным. Здесь период предстает как средний по п колебаниям период в опорном цикле. Поэтому в предлагаемом способе приведенный период определяется из реальной динамики маятника. В отличие от формулы (1), в формуле (10) автоматически учитывается реальный закон зависимости периода колебаний от амплитуды Т(ос). Это обеспечивает максимально возможную точность вычисления приведенного периода Та.Выбор границ рабочего интервала и положение опорного цикла в рабочем интервале,исходя из обеспечения допустимой погрешности оценки Та, позволяет дополнительно увеличить точность вычисления приведенного периода. Эта погрешность характеризуетсясредним квадратическим отклонением значений функции (9) при х 1 от значений Тд.
МПК / Метки
МПК: G01V 7/00
Метки: измерения, приведенного, свободных, колебаний, маятника, способ, периода
Код ссылки
<a href="https://by.patents.su/7-7056-sposob-izmereniya-privedennogo-perioda-svobodnyh-kolebanijj-mayatnika.html" rel="bookmark" title="База патентов Беларуси">Способ измерения приведенного периода свободных колебаний маятника</a>
Бытовой ультразвуковой расходомер-счетчик для измерения объемного расхода газа, приведенного по давлению и температуре к нормальным условиям
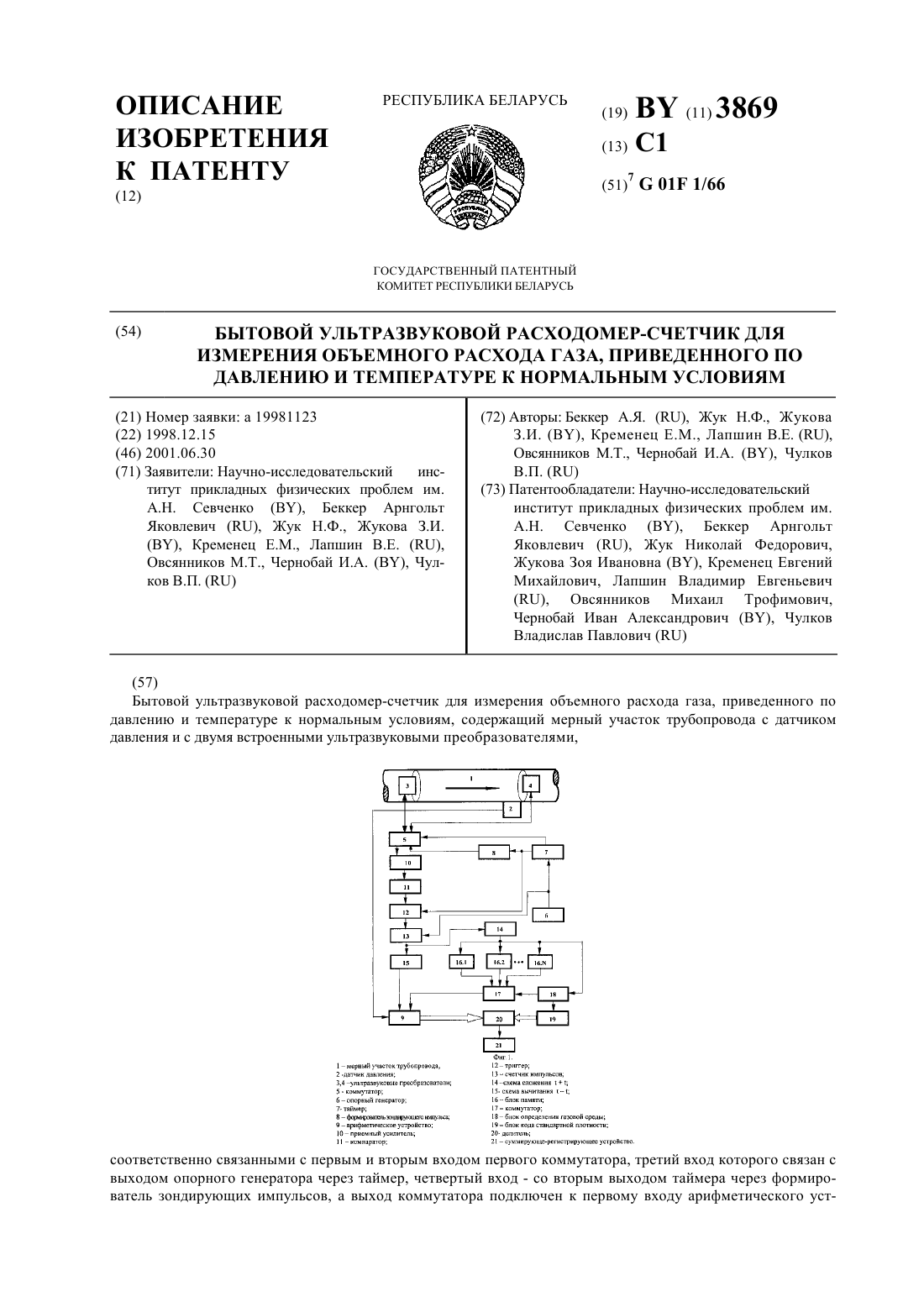
Номер патента: 3869
Опубликовано: 30.06.2001
Авторы: Овсянников Михаил Трофимович, Чернобай Иван Александрович, Кременец Евгений Михайлович, Беккер Арнгольт Яковлевич, Лапшин Владимир Евгеньевич, Чулков Владислав Павлович, Жук Николай Федорович, Жукова Зоя Ивановна
МПК: G01F 1/66
Метки: объемного, приведенного, ультразвуковой, условиям, расходомер-счетчик, измерения, расхода, нормальным, температуре, давлению, газа, бытовой
Текст:
...в мерном участке 1 трубопровода по потоку газа и принимается ультразвуковым преобразователем 4, в кото 3 3869 1 ром преобразуется в электрический сигнал, поступающий через коммутатор 5 на приемный усилитель 10. Усиленный сигнал с выхода приемного усилителя 10 поступает на вход компаратора 11, который при превышении сигналом порогового уровня вырабатывает на своем выходе импульс превышения порога. В течение промежутка 1, равного...
Установка для измерения затухания продольных ультразвуковых колебаний
Номер патента: U 1315
Опубликовано: 30.03.2004
Автор: Федоров Владислав Викторович
МПК: G01N 29/00
Метки: ультразвуковых, установка, колебаний, продольных, затухания, измерения
Текст:
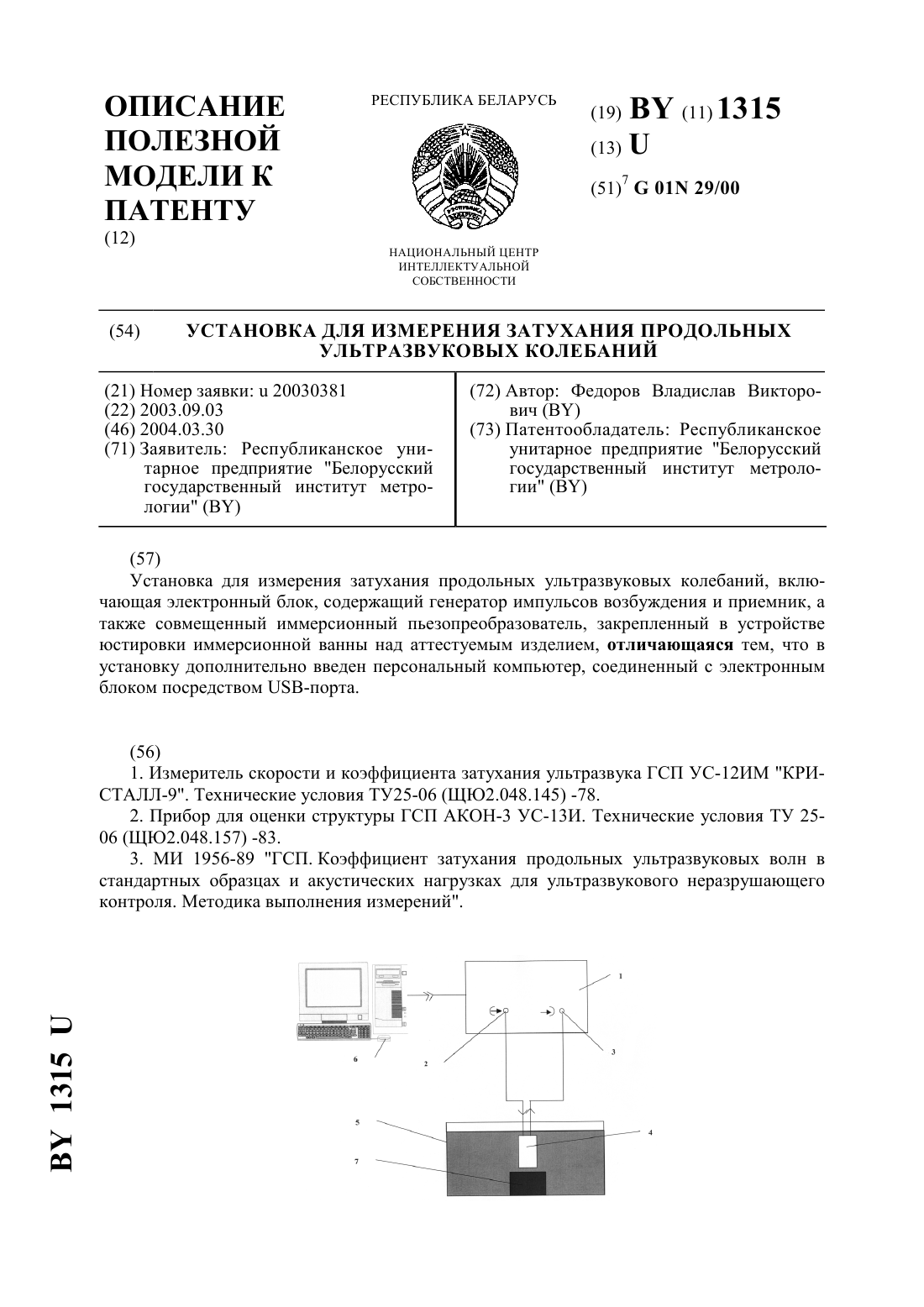
...часть функций электронного блока (в частности, выполняет предварительную обработку измерительной информации, поступающей на вход приемника устройства) выполняет функции устройства управления установкой выполняет функции устройства визуализации сигналов измерительной информации осуществляет обработку результатов измерений в соответствии с действующей нормативной документацией, представление результатов измерений в требуемом виде (вывод...
Способ сокращения сроков сервис-периода у коров
Номер патента: 5389
Опубликовано: 30.09.2003
Авторы: Зацепин Павел Филиппович, Горбунов Юрий Анатольевич
МПК: A01K 67/02
Метки: сроков, способ, сервис-периода, сокращения, коров
Текст:
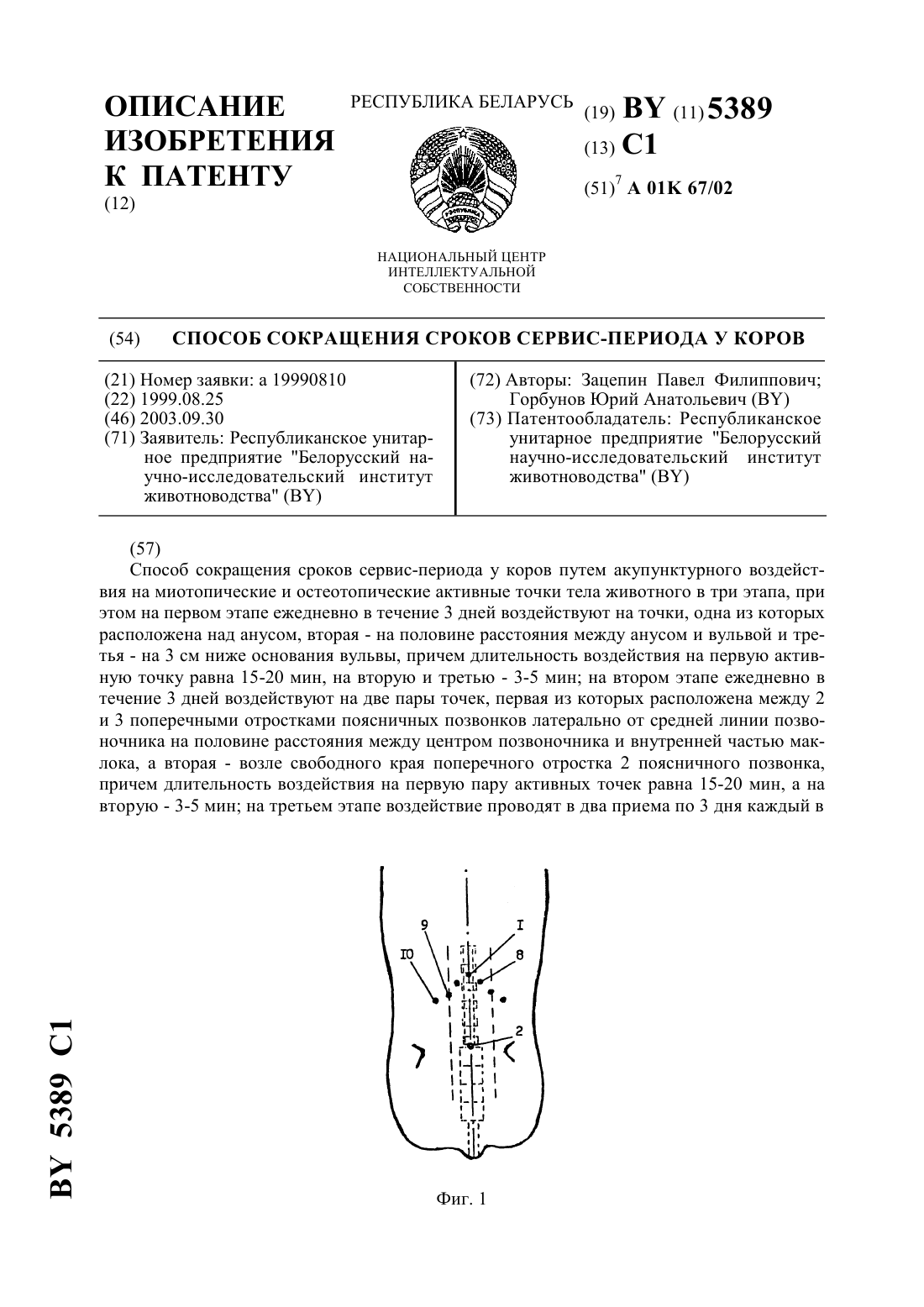
...воздействия осуществляют последовательно. На рисунке схематично показано расположение активных биоэнергетических точек на каудальной (фиг. 2) и дорзальной (фиг. 1) поверхностях тела животного. Пример. При установлении задержки прихода в охоту коров в течение 30 дней после отела животных подвергали восстановительно-энергетической терапии путем воздействия иглоукалывания в энергетические, миотопические и остеотопические точки тела. Таких...
Способ моделирования искусственного аборта у белых лабораторных крыс в различные сроки постимплантационного периода (варианты)
Номер патента: 4305
Опубликовано: 30.03.2002
Авторы: ДУДА Владимир Иванович, МУРАВЬЕВ Владимир Федорович, КУЛАГА Ольга Константиновна, ДУДА Иван Владимирович
МПК: A61N 2/00
Метки: варианты, периода, искусственного, постимплантационного, различные, способ, лабораторных, аборта, крыс, белых, моделирования, сроки
Текст:
...в заданном режиме интенсивность импульсного магнитного поля 1,01,5 Тесла, частота следования 40-45 пачек импульсов в минуту, интервал между импульсами в пачке 15-20 миллисекунд, при продолжительности сеанса 5-6 мин однократно. Крысу освобождают. Прерывание беременности у данной крысы наступило через трое суток, т.е. на 10-й день беременности. Объективными критериями его явилось макроскопическое и микроскопическое морфологические...
Способ определения концентрации свободных носителей заряда в кремнии
Номер патента: 1700
Опубликовано: 30.09.1997
Авторы: Литвинов Валентин Вадимович, Покотило Юрий Мефодьевич, Уренев Валерий Иванович
МПК: H01L 21/66, G01N 21/35
Метки: способ, заряда, определения, кремнии, носителей, концентрации, свободных
Текст:
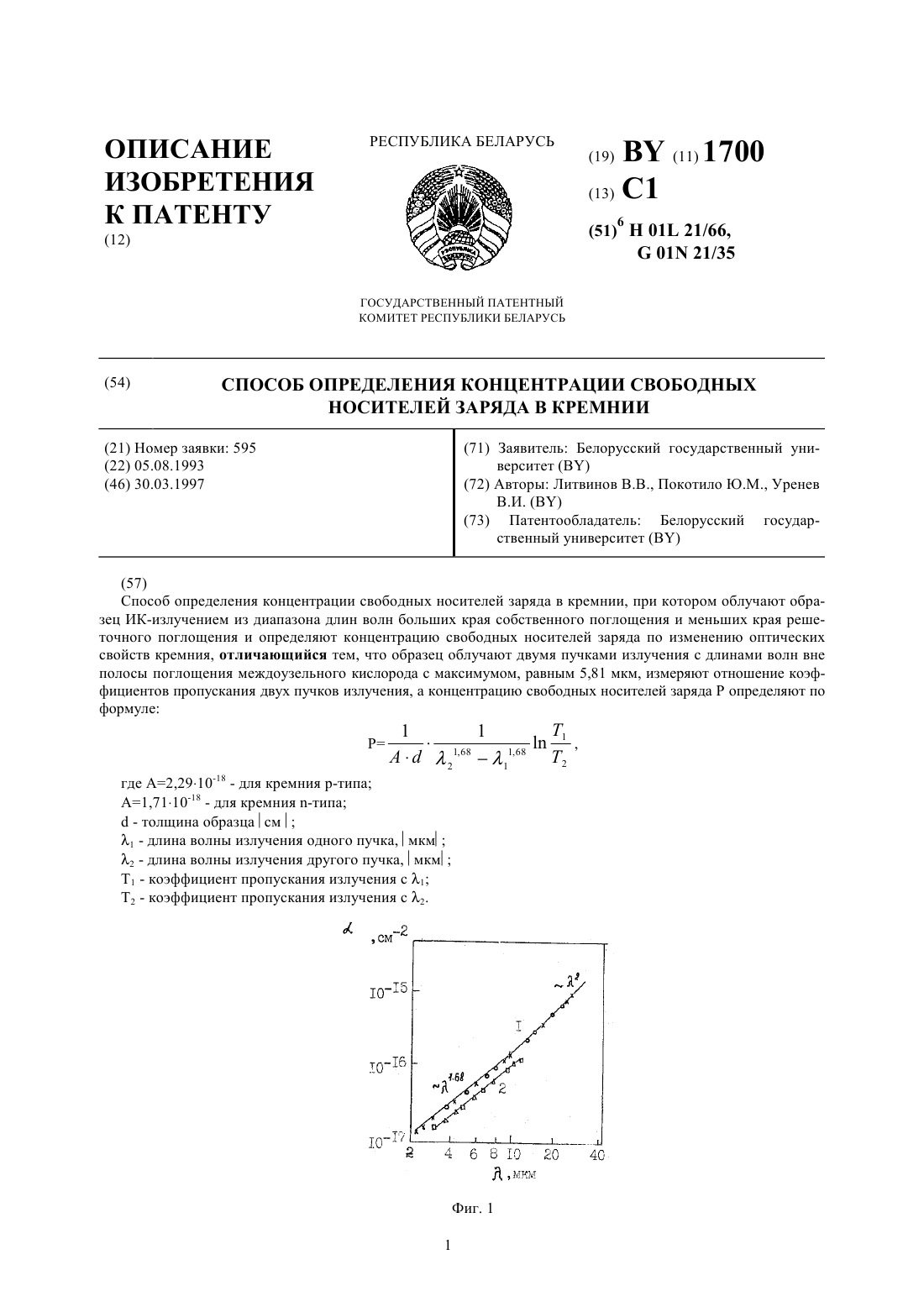
...р-типа (1) с удельным сопротивлением р 0,3 и 12 Ом.см и -типа (р 1 и 4,4 Ом.см) (2) от длины волны. На фиг.2 изображены профили распределения концентрации свободных носителей заряда вдоль оси роста слитков кремния типа КДБ-12 диаметром 100 (1) и 150 (2) мм. Для реализации неразрушающего метода определения концентрации свободных носителей заряда в предлагаемом способе измеряют отношение коэффициентов пропускания Т 1/Т 2 двух пучков...
Предыдущий патент: Опорно-приводной механизм роторных машин
Следующий патент: Проточная кондуктометрическая ячейка
Случайный патент: Устройство для очистки воздуха от пыли в производственном помещении