Механоэлектрический торсионный микропереключатель
Номер патента: U 9802
Опубликовано: 30.12.2013
Авторы: Жвавый Сергей Павлович, Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
Текст
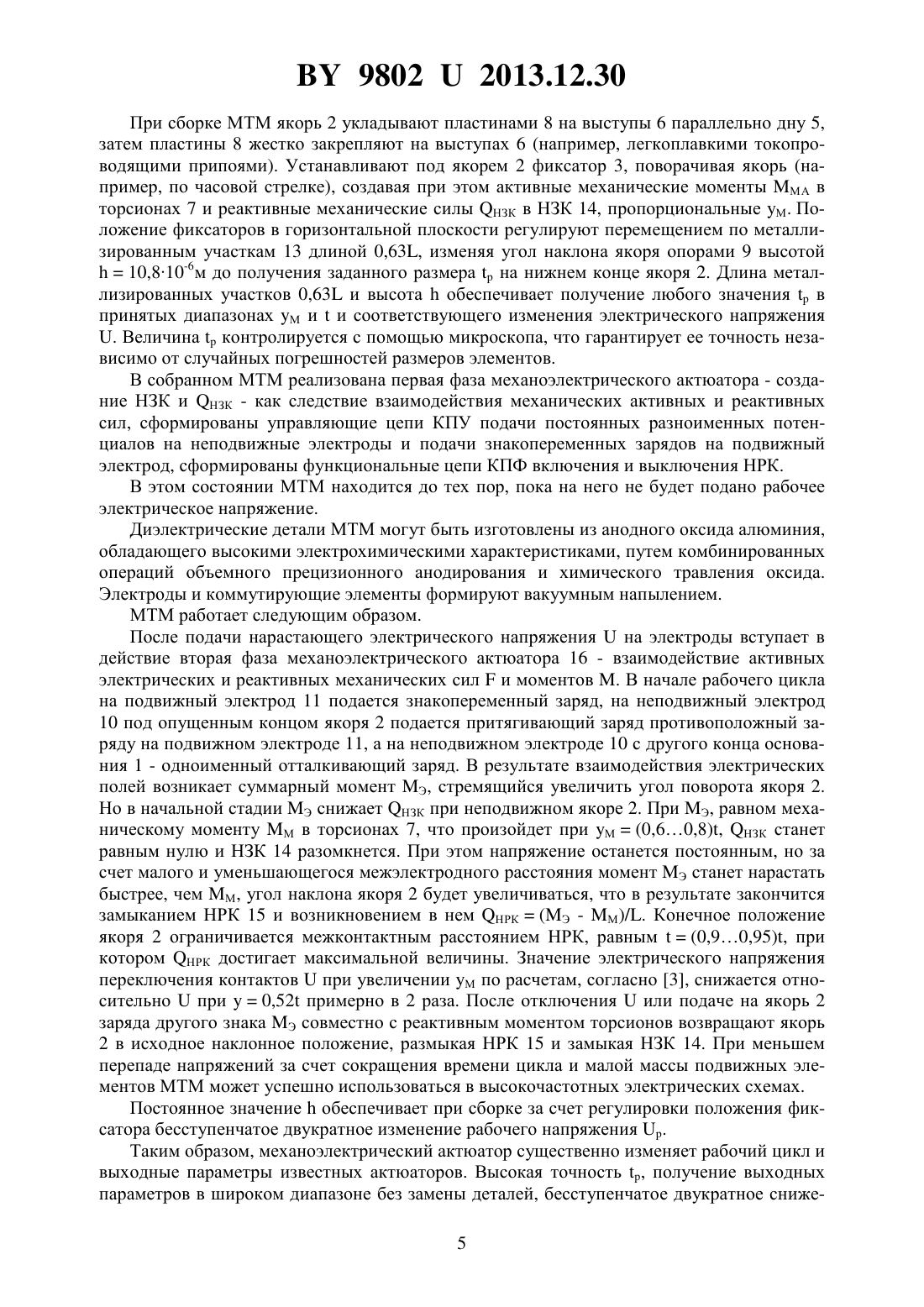
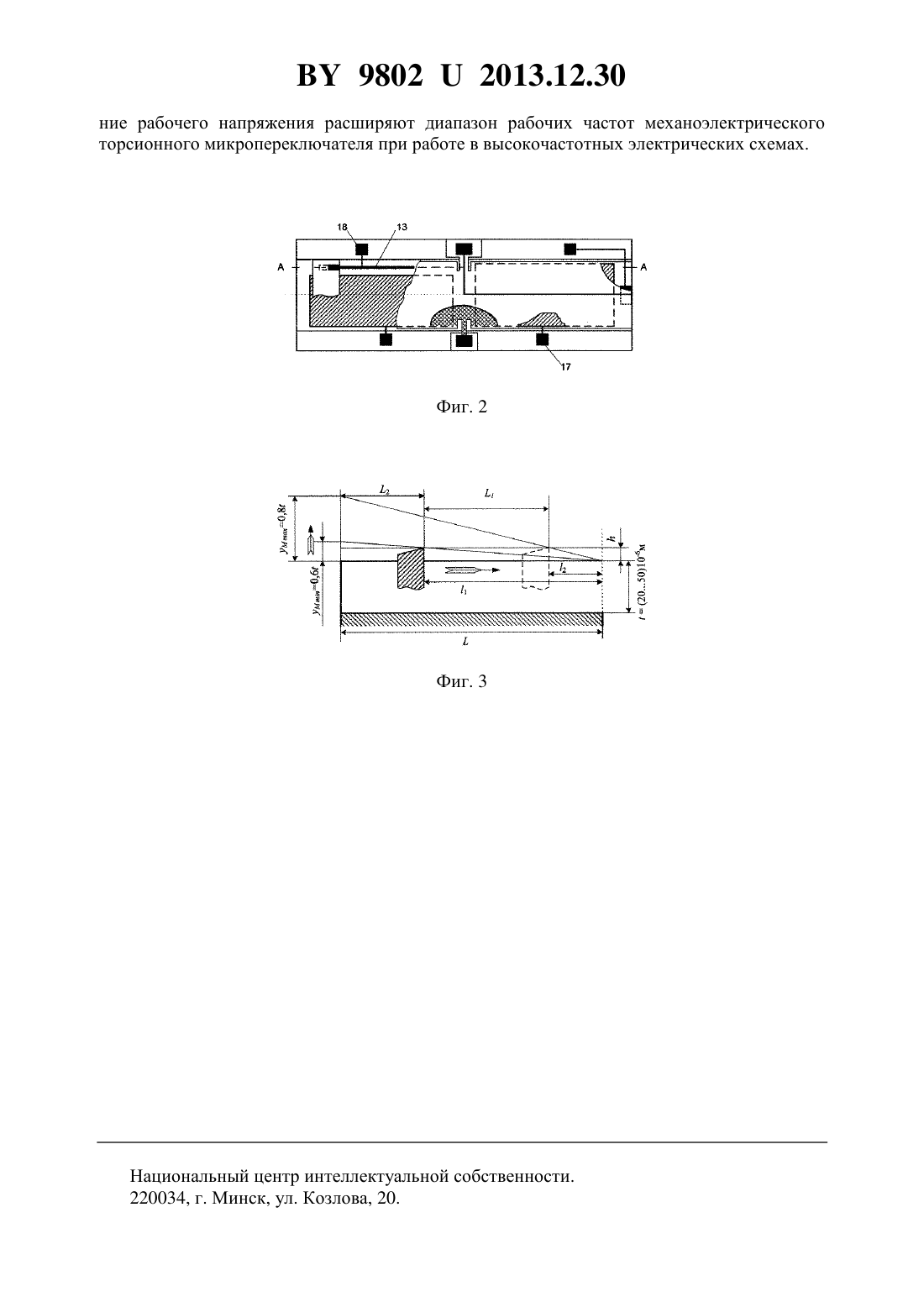
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(72) Авторы Мухуров Николай Иванович Ефремов Георгий Игнатьевич Жвавый Сергей Павлович(73) Патентообладатель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(57) Механоэлектрический торсионный микропереключатель, содержащий актюатор, диэлектрические прямоугольные основание и якорь с торсионами на его короткой оси симметрии, два неподвижных изолированных один от другого электрода на основании и подвижный электрод на якоре, образующих исходное межэлектродное расстояние , подвижный и неподвижный контакт нормально разомкнутых контактов под концом якоря и на основании, токопроводящие дорожки, отличающийся тем, что актюатор выполнен механоэлектрическим, состоящим из основания с пазом и продольными выступами высотой(2050)10-6 м, наклонного якоря, частично расположенного нижним концом с нормально разомкнутым контактом в пазе и с упруго деформированными торсионами с пластинами на их внешних концах, и регулируемым вдоль оси якоря фиксатором, электрически контактирующим с якорем, создавая нормально замкнутый контакт, установленный под верхним концом якоря и выполненный в форме параллелепипеда, высота которого большена 10,810-6 м, при этом на нижней стороне фиксатора выполнены две опоры, одна из которых с токопроводящим покрытием, электрически соединенным с металлизированными участками на дне паза и нижней стороне якоря, которые имеют длину 10,63, расположены на расстоянии 20,1 от конца якоря, где- длина половины якоря, 1 - длина металлизированных участков, 2 - расстояние от конца якоря, а межэлектродное рабочее расстояниепод нижним концом якоря составляет 0,5, при этом якорь, торсионы с пластинками выполнены единой толщины и расположены в одной плоскости, а также неподвижный и подвижный электроды соединены с контактными площадками управляющей цепи, а нормально замкнутый контакт и нормально разомкнутый контакт соединены с контактными площадками функциональной цепи.(56) 1.4113190, 1, МПК 01 59/00. 2.20020000364, 1, МПК 01 057/00. 3. Мухуров Н.И., Ефремов Г.И. Анализ взаимосвязи электромеханических характеристик электростатических торсионных микросистем // Нано- и микросистемная техника. 2007. -5. - С. 52-59. Полезная модель относится к электротехнике, микромеханике, микроэлектронике и может быть использована в управляющих, регулирующих, контролирующих системах широкого диапазона частот. Известен электростатический управляющий микровключатель (ЭУМ) 1, использующий электромеханический актюатор (ЭМА), который осуществляет взаимодействие активных электрических и реактивных механических сил в течение всего рабочего цикла и замыкает нормально разомкнутый контакт НРК. Он содержит диэлектрическое плоское основание с расположенными на его верхней плоскости двумя изолированными один от другого неподвижными электродами и контактной группой. Над основанием параллельно ему размещен диэлектрический якорь, на нижней поверхности которого сформирован единый подвижный электрод, расположенный над неподвижными. Якорь закреплен на основании посредством упругих торсионов, которые выполнены заодно с якорем на двух его длинных сторонах на оси симметрии якоря. Оба торсиона имеют П-образную форму. На нижних концах торсионов предусмотрены плоские прокладки, которые жестко закреплены на основании. Высота торсионов и прокладок образует суммарное межэлектродное расстояние . На конце якоря на упругих перемычках сформирован подвижный контакт. При подаче на электроды знакопеременного потенциала якорь на деформируемых торсионах поворачивается в ту или иную сторону и замыкает, затем при переключении заряда размыкает нормально разомкнутые контакты (НРК). В исходном положении ЭУМ содержит лишь НРК. Сложная и неустойчивая форма торсионов, необходимость полностью заменять конструкцию якоря при изменении рабочего частотного диапазона существенно ограничивают диапазон рабочих частот в высокочастотных электрических схемах с ЭУМ. Наиболее близким по технической сущности является двухтактный микромеханический микроволновой выключатель (ММВ) 2. Он содержит жесткое диэлектрическое основание с плоской верхней поверхностью, над которой параллельно расположен плоский диэлектрический якорь прямоугольной формы. На одной из сторон якоря сформирован рычажок, на двух других параллельных сторонах выполнены соосные симметричные упругие торсионы. На их внешних концах со стороны основания имеются выступы, они закреплены на основании и составляют часть межэлектродного расстояния . На основании расположены два изолированных один от другого неподвижных электрода, на верхней поверхности якоря над ними сформирован единый поворотный электрод. Основание,якорь и электроды образуют ЭМА. На конце рычажка и под ним на основании нанесены контакты НРК. Выполнены соответствующие токопроводящие дорожки, в том числе на торсионах. При подаче постоянного заряда на поворотный электрод и знакопеременных зарядов на неподвижные электроды якорь деформирует торсионы, поворачиваясь в одну сторону, рычажком замыкает контакты НРК, которые размыкает при повороте в обратную сторону. Нормально замкнутых контактов в конструкции нет. Таким образом, выключатель работает только в режиме замыкания разомкнутой цепи. Большой разброс рабочих параметров из-за погрешностей составной размерной цепи межэлектродного расстояния , замена якоря при изменении рабочего частотного диапазона существенно ограничивают диапазон рабочих частот в высокочастотных электрических схемах. 98022013.12.30 Технической задачей полезной модели является расширение диапазона рабочих частот в высокочастотных электрических схемах. Решение технической задачи достигается тем, что в механоэлектрическом торсионном микропереключателе, содержащем актюатор, диэлектрические прямоугольные основание и якорь с торсионами на его короткой оси симметрии, два неподвижных изолированных один от другого электрода на основании и подвижный электрод на якоре, образующих исходное межэлектродное расстояние , подвижный и неподвижный контакт нормально разомкнутых контактов под концом якоря и на основании, токопроводящие дорожки,актюатор выполнен механоэлектрическим, состоящим из основания с пазом и продольными выступами высотой(2050)10-6 м, наклонного якоря, частично расположенного нижним концом с нормально разомкнутым контактом в пазе и с упруго деформированными торсионами с пластинами на их внешних концах, и регулируемым вдоль оси якоря фиксатором, электрически контактирующимс якорем, создавая нормально замкнутый контакт, установленный под верхним концом якоря и выполненный в форме параллелепипеда, высота которого большена 10,810-6 м, при этом на нижней стороне фиксатора выполнены две опоры, одна из которых с токопроводящим покрытием, электрически соединенным с металлизированными участками на дне паза и нижней стороне якоря, которые имеют длину 10,63, расположены на расстоянии 20,1 от конца якоря, гдедлина половины якоря, 1 - длина металлизированных участков, 2 - расстояние от конца якоря, а межэлектродное рабочее расстояниепод нижним концом якоря составляет 0,5, при этом якорь, торсионы с пластинками выполнены единой толщины и расположены в одной плоскости, а также неподвижный и подвижный электроды соединены с контактными площадками управляющей цепи, а нормально замкнутый контакт и нормально разомкнутый контакт соединены с контактными площадками функциональной цепи. Сущность полезной модели поясняется фиг. 1-3. На фиг. 1 представлено продольное сечение по оси симметрии механоэлектрического торсионного микропереключателя (МТМ), на котором 1 - основание 2 - якорь 3 - фиксатор 4 - паз 5 - дно 6 - выступ 7 - торсион 8 - пластина 9 - опора 10 - неподвижный электрод 11 - подвижный электрод 12 - токопроводящая дорожка 13 - металлизированный участок 14 - нормально замкнутый контакт (НЗК) 15 - нормально разомкнутый контакт (НРК) 16 - актюатор. На фиг. 2 представлен вид сверху на МТМ с фиксатором 3 и часть основания 1, на котором 17 - контактная площадка управляющих цепей (КПУ) 18 - контактная площадка функционирующих цепей (КПФ). На фиг. 3 представлена кинематика поворота якоря 2 с фиксатором 3. МТМ содержит прямоугольные диэлектрические основание 1, плоский якорь 2, фиксатор 3 (фиг. 1). 98022013.12.30 В центральной части основания 1 (фиг. 1) выполнен паз 4 с плоским дном 5, на двух продольных сторонах которого расположены выступы 6 высотой, равной исходному межэлектродному расстоянию . Якорь 2 в наклонном положении размещен над основанием 1 и частично одним концом в пазе 4. На его короткой оси симметрии с двух сторон сформированы упругие торсионы 7 прямоугольного сечения. Их внешние концы заканчиваются опорными пластинами 8, закрепленными на выступах 6. Сечение торсионов 7 и толщина пластин 8 равны толщине якоря 2, расположены в одной плоскости, что позволяет сохранить высокую точность . Фиксатор 3 выполнен регулируемым вдоль оси основания 1. Он расположен на конце основания 1 под приподнятым концом якоря 2, имеет форму параллелепипеда с опорами 9 на его нижней стороне, опирающимися на дно 5. На одну из них нанесено контактное покрытие, а под ней на дне 5 и над ней на нижней стороне якоря 2 размещены металлизированные участки 13, сформированные вдоль одного из выступов 6(фиг. 2). Высота фиксатора 3 больше , которая поворачивает якорь 2, обеспечивая на другом его конце получение нужного размера . На дне 5 расположен неподвижный электрод НЭ 10. На нижней плоскости якоря 2 над ними сформирован подвижный электрод ПЭ 11. В МТМ содержится замкнутый НЗК 14, расположенный на якоре 2 и фиксаторе 3, и разомкнутый НРК 15, токопроводящие дорожки 12 к электродам и контактам, металлизированные участки 13 к фиксатору 3. Позиции 2, 3, 7, 10, 11 образуют механоэлектрический актюатор 16, который осуществляет функционирование МТМ. На выступах 6 с одной стороны МТМ выполнены (фиг. 2) контактные площадки управляющих цепей (КПУ) 17, соединенные с неподвижным 10 и подвижным 11 электродами, с другой - контактные площадки функциональных цепей (КПФ) 18, соединенные с НЗК 14 и НРК 15, что обеспечивает простоту коммутации с внешней аппаратурой. Фиксатор 3 применяется в диапазоне(2050)10-6 м. В торсионных системах с электромеханическим актюатором (ЭМА) критичной величиной параметров является координата 00,52, которая определяет значение рабочего электрического напряженияи разделяет холостой и исполнительный участки цикла. Последний замыкает и размыкает НРК 15 3. В механоэлектрическом актюаторе за счет упора фиксатора 3 в якорь 2 на первом участке создается НЗК 14 и в нем контактное усилие З. Реализация НЗК 14 достигается при механическом смещении нижнего конца якоря на М(0,60,8)0, что соответствует получению рабочего межэлектродного расстояния(0,40,2). Диапазон М за счет регулировки положения фиксатора 3 обеспечивает надежность работы МТМ и по нижнему, и по верхнему пределу. С учетом обеспечения в целях унификации МТМ постоянстваво всем диапазонеи создания контакта НЗК 14 при регулировании положения фиксатора длина металлизированных участковпри 20,1, где 2 - расстояние от конца якоря, определяется следующими соотношениями (фиг. 3) в общем виде 98022013.12.30 При сборке МТМ якорь 2 укладывают пластинами 8 на выступы 6 параллельно дну 5,затем пластины 8 жестко закрепляют на выступах 6 (например, легкоплавкими токопроводящими припоями). Устанавливают под якорем 2 фиксатор 3, поворачивая якорь (например, по часовой стрелке), создавая при этом активные механические моменты МА в торсионах 7 и реактивные механические силы НЗК в НЗК 14, пропорциональные М. Положение фиксаторов в горизонтальной плоскости регулируют перемещением по металлизированным участкам 13 длиной 0,63, изменяя угол наклона якоря опорами 9 высотой 10,810-6 м до получения заданного размерана нижнем конце якоря 2. Длина металлизированных участков 0,63 и высотаобеспечивает получение любого значенияв принятых диапазонах М ии соответствующего изменения электрического напряжения. Величинаконтролируется с помощью микроскопа, что гарантирует ее точность независимо от случайных погрешностей размеров элементов. В собранном МТМ реализована первая фаза механоэлектрического актюатора - создание НЗК и НЗК - как следствие взаимодействия механических активных и реактивных сил, сформированы управляющие цепи КПУ подачи постоянных разноименных потенциалов на неподвижные электроды и подачи знакопеременных зарядов на подвижный электрод, сформированы функциональные цепи КПФ включения и выключения НРК. В этом состоянии МТМ находится до тех пор, пока на него не будет подано рабочее электрическое напряжение. Диэлектрические детали МТМ могут быть изготовлены из анодного оксида алюминия,обладающего высокими электрохимическими характеристиками, путем комбинированных операций объемного прецизионного анодирования и химического травления оксида. Электроды и коммутирующие элементы формируют вакуумным напылением. МТМ работает следующим образом. После подачи нарастающего электрического напряженияна электроды вступает в действие вторая фаза механоэлектрического актюатора 16 - взаимодействие активных электрических и реактивных механических сили моментов . В начале рабочего цикла на подвижный электрод 11 подается знакопеременный заряд, на неподвижный электрод 10 под опущенным концом якоря 2 подается притягивающий заряд противоположный заряду на подвижном электроде 11, а на неподвижном электроде 10 с другого конца основания 1 - одноименный отталкивающий заряд. В результате взаимодействия электрических полей возникает суммарный момент Э, стремящийся увеличить угол поворота якоря 2. Но в начальной стадии Э снижает НЗК при неподвижном якоре 2. При Э, равном механическому моменту М в торсионах 7, что произойдет при М(0,60,8), НЗК станет равным нулю и НЗК 14 разомкнется. При этом напряжение останется постоянным, но за счет малого и уменьшающегося межэлектродного расстояния момент Э станет нарастать быстрее, чем М, угол наклона якоря 2 будет увеличиваться, что в результате закончится замыканием НРК 15 и возникновением в нем НРК(Э - М)/. Конечное положение якоря 2 ограничивается межконтактным расстоянием НРК, равным(0,90,95), при котором НРК достигает максимальной величины. Значение электрического напряжения переключения контактовпри увеличении М по расчетам, согласно 3, снижается относительнопри 0,52 примерно в 2 раза. После отключенияили подаче на якорь 2 заряда другого знака Э совместно с реактивным моментом торсионов возвращают якорь 2 в исходное наклонное положение, размыкая НРК 15 и замыкая НЗК 14. При меньшем перепаде напряжений за счет сокращения времени цикла и малой массы подвижных элементов МТМ может успешно использоваться в высокочастотных электрических схемах. Постоянное значениеобеспечивает при сборке за счет регулировки положения фиксатора бесступенчатое двукратное изменение рабочего напряжения . Таким образом, механоэлектрический актюатор существенно изменяет рабочий цикл и выходные параметры известных актюаторов. Высокая точность , получение выходных параметров в широком диапазоне без замены деталей, бесступенчатое двукратное сниже 5 98022013.12.30 ние рабочего напряжения расширяют диапазон рабочих частот механоэлектрического торсионного микропереключателя при работе в высокочастотных электрических схемах. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H01H 59/00
Метки: торсионный, механоэлектрический, микропереключатель
Код ссылки
<a href="https://by.patents.su/6-u9802-mehanoelektricheskijj-torsionnyjj-mikropereklyuchatel.html" rel="bookmark" title="База патентов Беларуси">Механоэлектрический торсионный микропереключатель</a>
Механоэлектрический торсионный микропереключатель

Номер патента: U 9762
Опубликовано: 30.12.2013
Авторы: Жвавый Сергей Павлович, Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: механоэлектрический, торсионный, микропереключатель
Текст:
...расстоянии 20,1 от конца якоря, где- длина половины якоря, 1 - длина металлизированных участков, 2 - расстояние от конца якоря, а межэлектродное рабочее расстояниепод нижним концом якоря составляет(0,40,2), причем пластины и фиксатор базируются на обоих выступах основания, а контактные площадки управляющих и функционирующих цепей расположены раздельно на разных выступах основания. Сущность полезной модели поясняется фиг. 1-3. На фиг. 1...
Электростатический микропереключатель
Номер патента: 11940
Опубликовано: 30.06.2009
Авторы: Котова Инна Федоровна, Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: электростатический, микропереключатель
Текст:
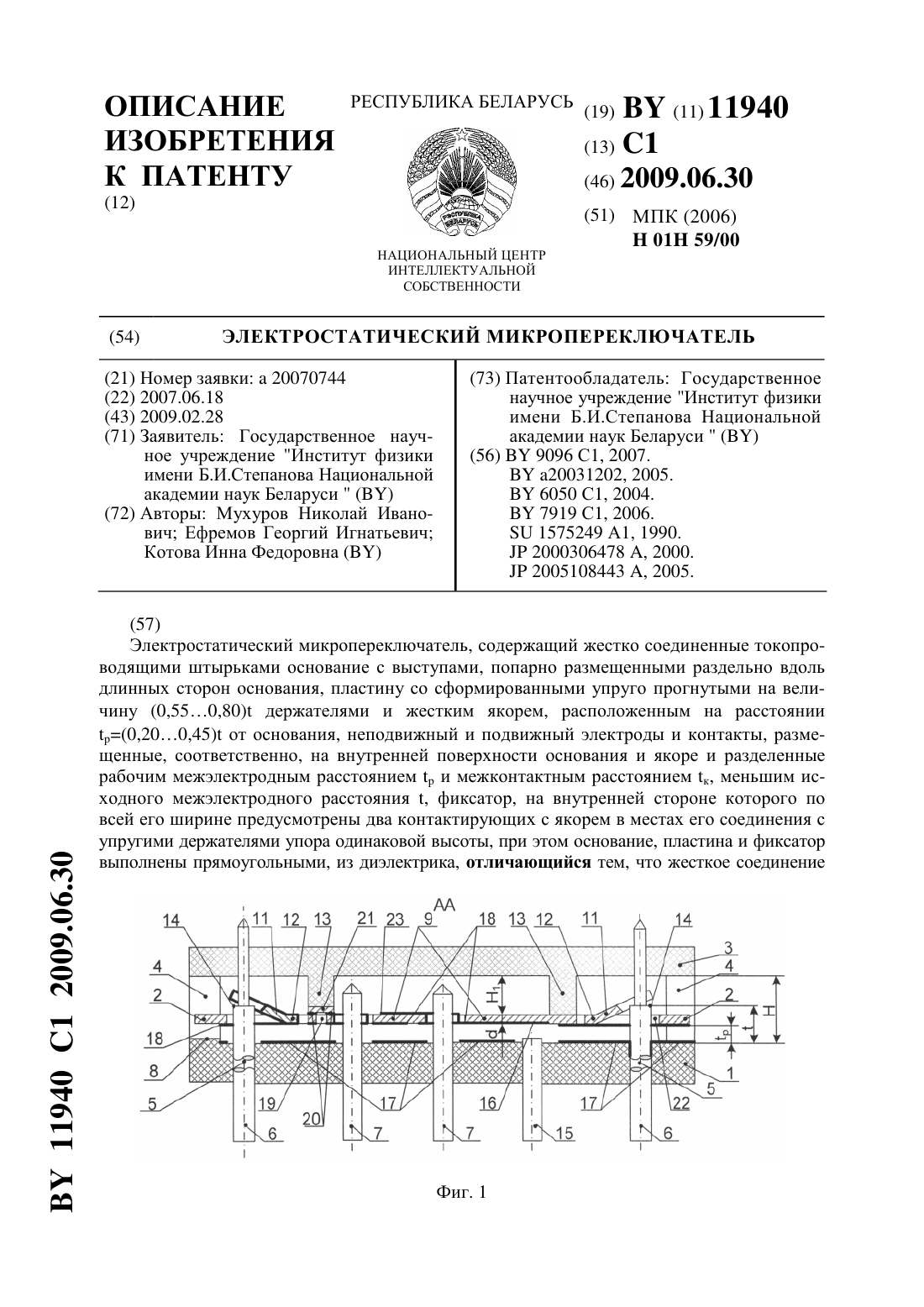
...Н 1 Н- (0,200,45), где Н - высота выступов основания,- толщина пластины. Совокупность указанных признаков обеспечивает расширение коммутационных возможностей за счет переключения управляемых электрических цепей. Сущность изобретения поясняется фиг. 1, 2. На фиг. 1 представлено поперечное сечение электростатического микропереключателя, на котором 1 - основание,2 - пластина,3 - фиксатор,4 - выступ,5 - отверстие,6 - периферийный токопроводящий...
Емкостный датчик резонанса подвижных элементов в электростатическом микрореле
Номер патента: U 8965
Опубликовано: 28.02.2013
Авторы: Остапенко Евгения Викторовна, Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: микрореле, электростатическом, резонанса, подвижных, датчик, элементов, емкостный
Текст:
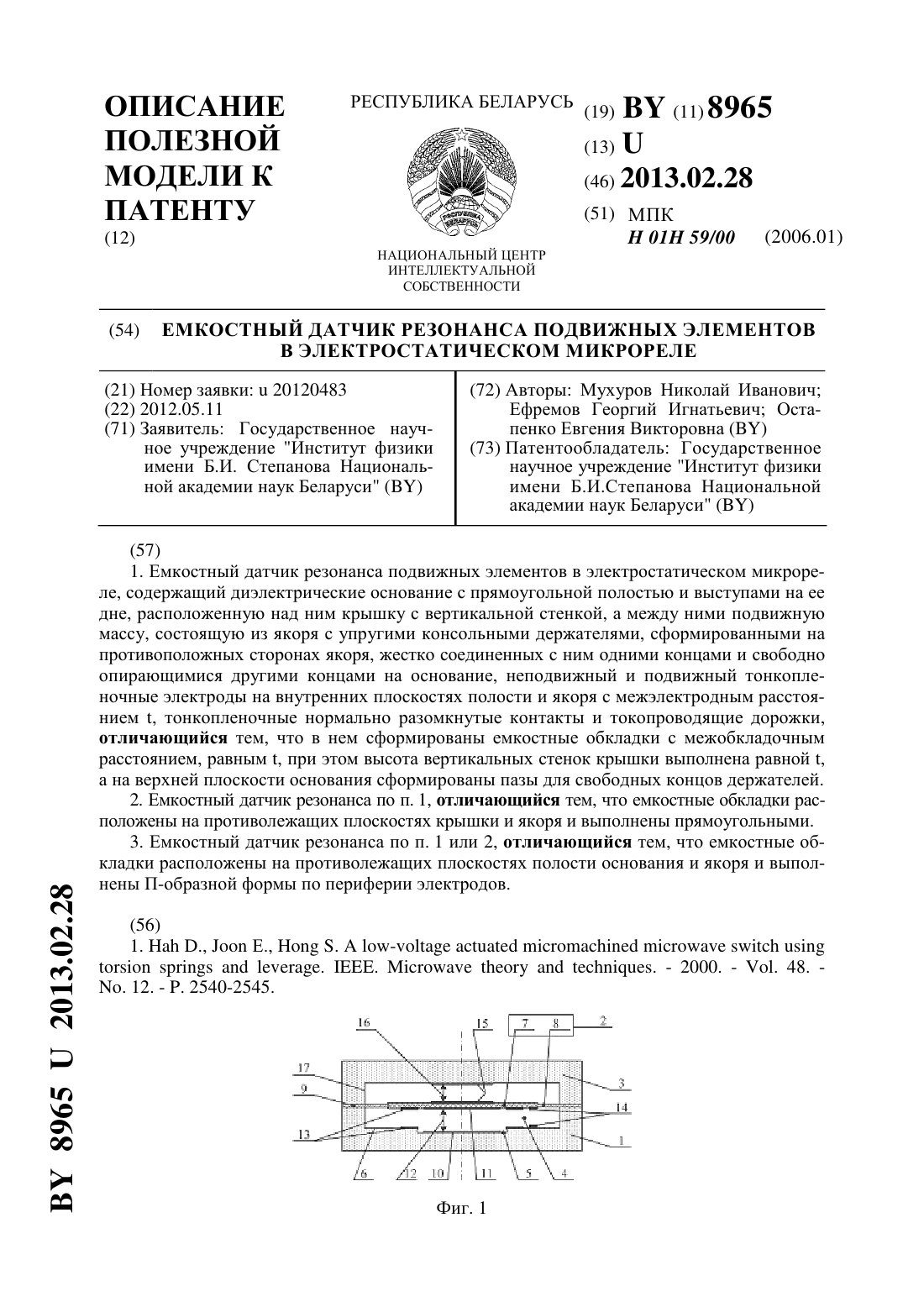
...возможности порогового датчика в виде ММР. 2 89652013.02.28 Технической задачей полезной модели является расширение функциональных возможностей порогового датчика в виде ММР за счет отслеживания резонанса подвижных элементов и его учета при проектировании ММР. Решение технической задачи достигается тем, что в емкостном датчике резонанса подвижных элементов в электростатическом микрореле, содержащем диэлектрические основание с прямоугольной...
Индуктивный датчик
Номер патента: U 1305
Опубликовано: 30.03.2004
Авторы: Минченя Виталий Владимирович, Минченя Николай Тимофеевич, Карпович Сергей Леонидович
МПК: G01B 7/00
Метки: датчик, индуктивный
Текст:
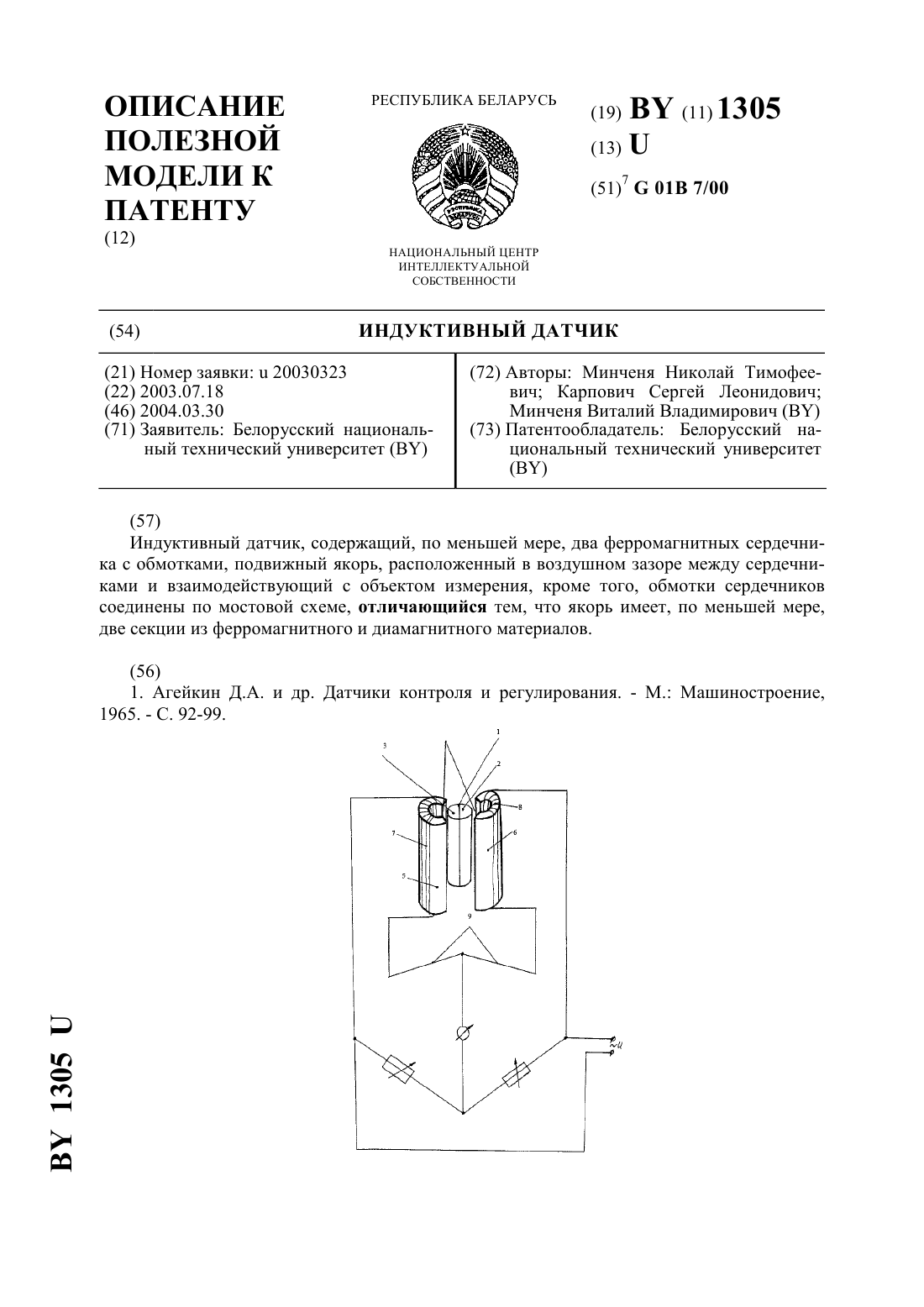
...чувствительность. Известен мостовой индуктивный датчик перемещений, содержащий ферромагнитные сердечники броневого типа с обмотками. В воздушном зазоре между каждой парой сердечников расположен подвижный якорь, выполненный в виде ферромагнитного диска. С обеих сторон диска в кольцеобразных пазах размещены якорные обмотки, замкнутые на внешнюю регулировочную нагрузку. Имеется шток, жестко соединенный с якорями и объектом измерения,...
Электрододержатель для ручной дуговой сварки
Номер патента: U 1403
Опубликовано: 30.06.2004
Авторы: Каспер Юрий Владимирович, Шелег Валерий Константинович, Романенков Владимир Андреевич
МПК: B23K 9/28
Метки: электрододержатель, ручной, дуговой, сварки
Текст:
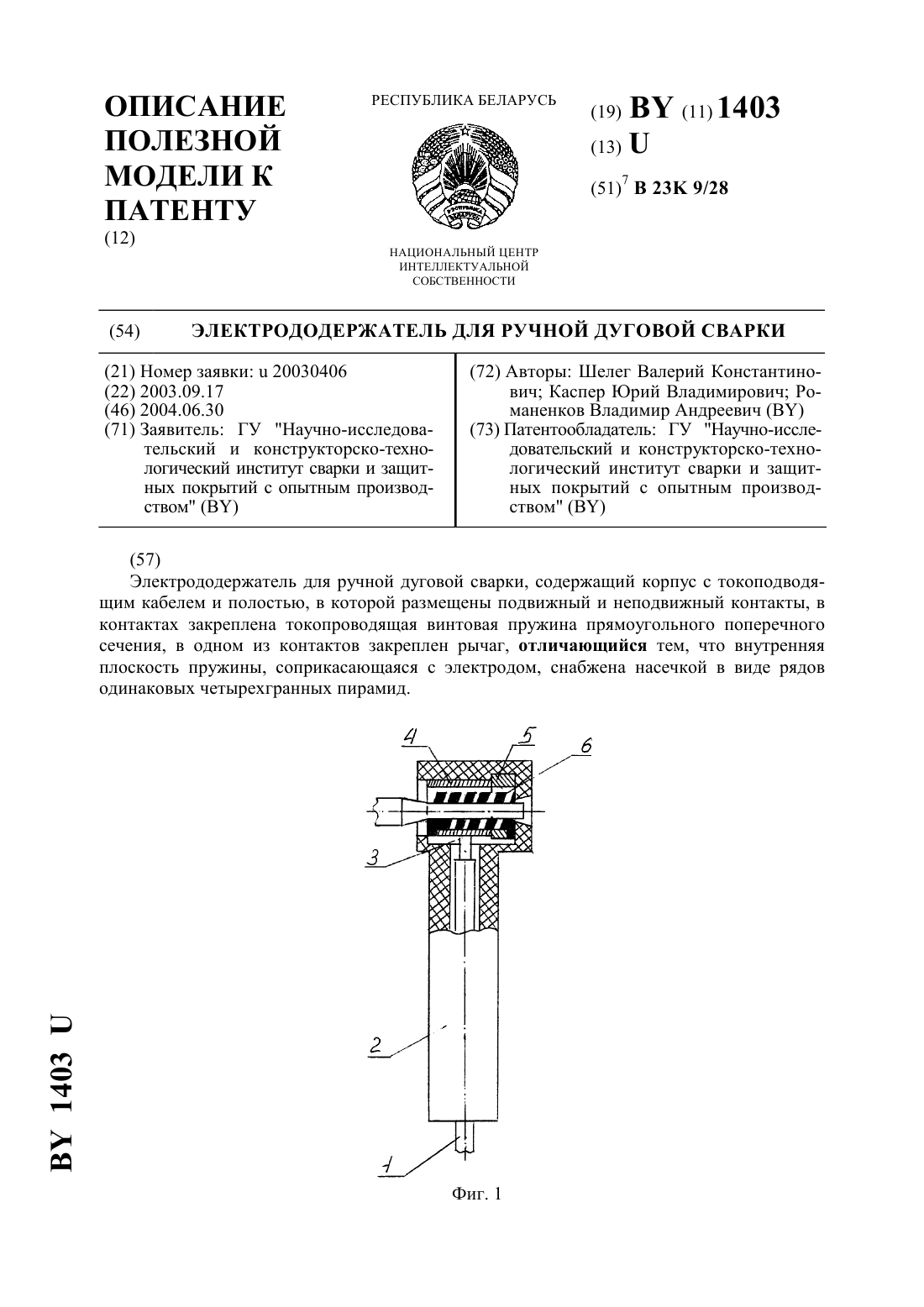
...электрода путем создания шероховатой поверхности на внутренней, прилегающей к электроду плоскости токопроводящей пружины в виде насечки рядов одинаковых четырехгранных пирамид. Задача решается тем, что в электрододержателе для ручной дуговой сварки, содержащем корпус с токоподводящим кабелем и полостью, в которой размещены подвижный и неподвижный контакты, в контактах закреплена токопроводящая винтовая пружина прямоугольного поперечного...
Предыдущий патент: Система отвода конденсата из калориферов воздухоподогревателей
Следующий патент: Компактный энергосберегающий газоразрядный источник света для спектрометрических работ
Случайный патент: Способ дифференциальной диагностики злокачественных и доброкачественных заболеваний щитовидной железы