Емкостный датчик резонанса подвижных элементов в электростатическом микрореле
Номер патента: U 8965
Опубликовано: 28.02.2013
Авторы: Остапенко Евгения Викторовна, Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
Текст
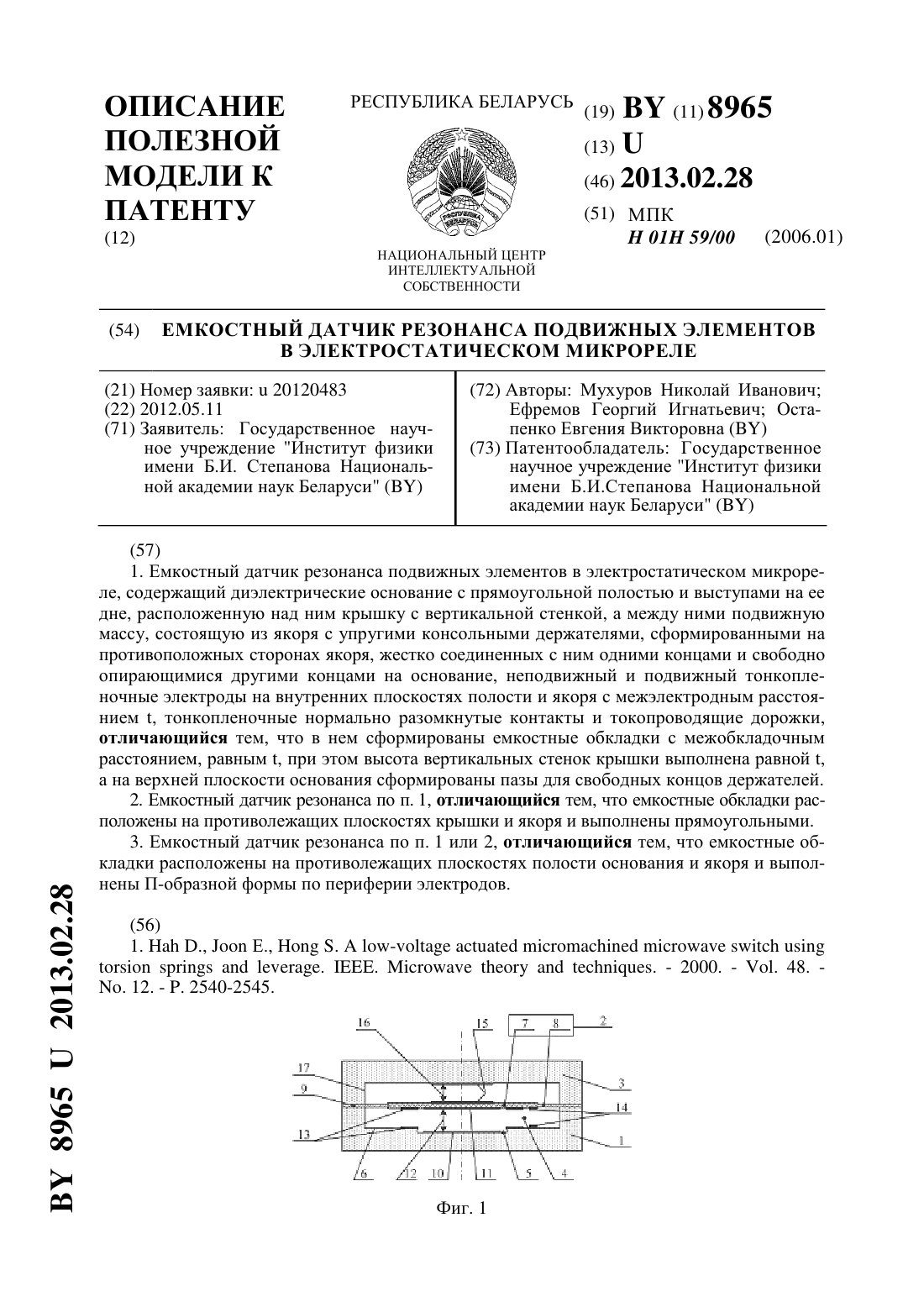
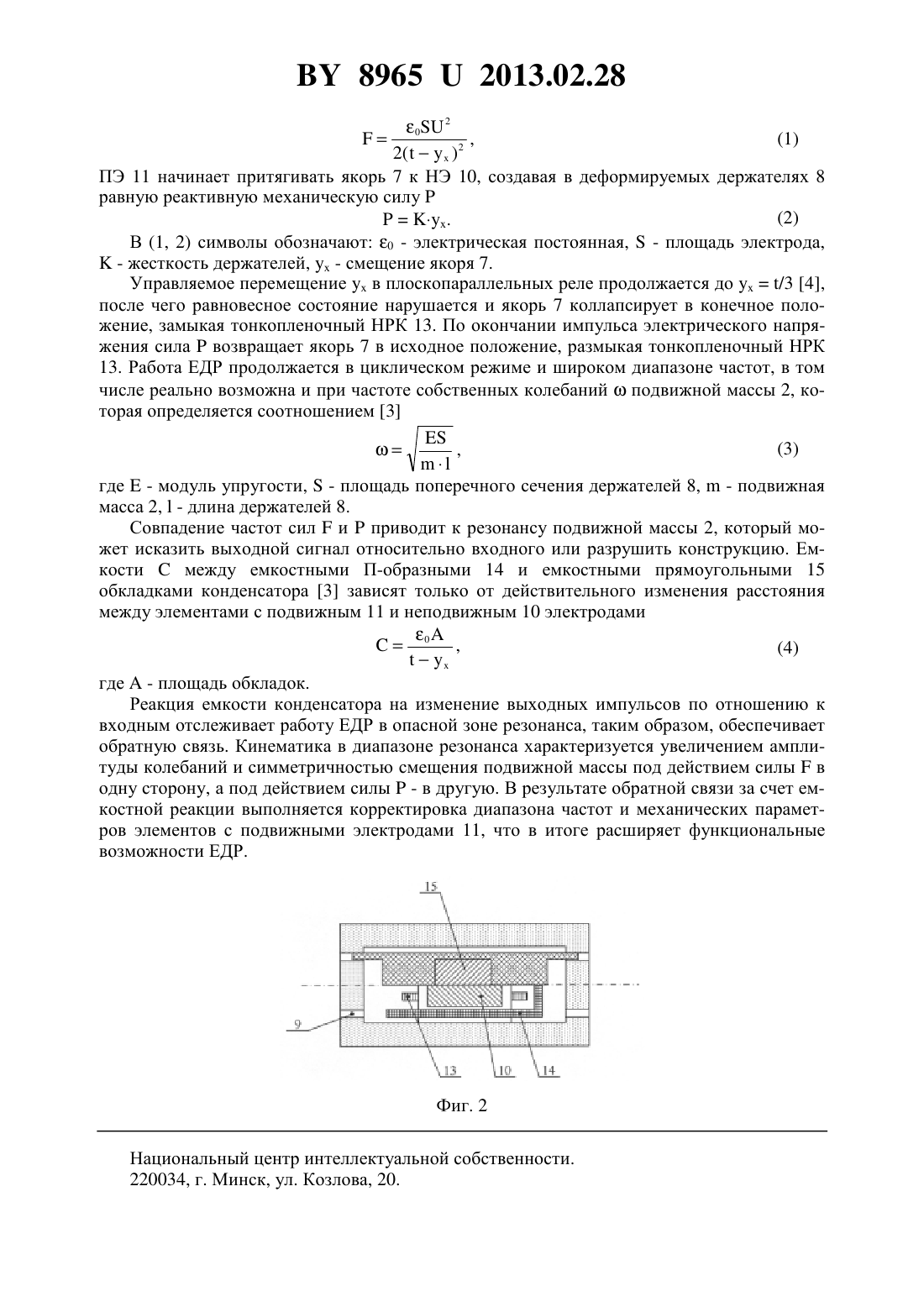
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ ЕМКОСТНЫЙ ДАТЧИК РЕЗОНАНСА ПОДВИЖНЫХ ЭЛЕМЕНТОВ В ЭЛЕКТРОСТАТИЧЕСКОМ МИКРОРЕЛЕ(71) Заявитель Государственное научное учреждение Институт физики имени Б.И. Степанова Национальной академии наук Беларуси(72) Авторы Мухуров Николай Иванович Ефремов Георгий Игнатьевич Остапенко Евгения Викторовна(73) Патентообладатель Государственное научное учреждение Институт физики имени Б.И.Степанова Национальной академии наук Беларуси(57) 1. Емкостный датчик резонанса подвижных элементов в электростатическом микрореле, содержащий диэлектрические основание с прямоугольной полостью и выступами на ее дне, расположенную над ним крышку с вертикальной стенкой, а между ними подвижную массу, состоящую из якоря с упругими консольными держателями, сформированными на противоположных сторонах якоря, жестко соединенных с ним одними концами и свободно опирающимися другими концами на основание, неподвижный и подвижный тонкопленочные электроды на внутренних плоскостях полости и якоря с межэлектродным расстоянием , тонкопленочные нормально разомкнутые контакты и токопроводящие дорожки,отличающийся тем, что в нем сформированы емкостные обкладки с межобкладочным расстоянием, равным , при этом высота вертикальных стенок крышки выполнена равной ,а на верхней плоскости основания сформированы пазы для свободных концов держателей. 2. Емкостный датчик резонанса по п. 1, отличающийся тем, что емкостные обкладки расположены на противолежащих плоскостях крышки и якоря и выполнены прямоугольными. 3. Емкостный датчик резонанса по п. 1 или 2, отличающийся тем, что емкостные обкладки расположены на противолежащих плоскостях полости основания и якоря и выполнены П-образной формы по периферии электродов. 89652013.02.28 2. Патент РБ 9702.1, МПК 01 59/00. 3. Кухлинг . Справочник по физике. - М. Мир, 1983. 4.К.Е.//. 1982. - . 70. . 5. - . 420-457. Полезная модель относится к электротехнике, микроэлектронике, микромеханике и может быть использована в регулирующих, контролирующих, сканирующих высокочастотных микроустройствах, содержащих подвижные массы. Известен пороговый датчик в виде торсионного микромеханического устройства(ММУ) 1. Он содержит плоское диэлектрическое основание с двумя выступами на верхней плоскости, в пазах которых закреплена подвижная масса, состоящая из плоского якоря с двумя симметричными упругими торсионами прямоугольного сечения, расположенными на короткой оси якоря. Торсионы установлены в пазы выступов. Между выступами на основании сформированы два раздельных неподвижных электрода. Над ними на якоре нанесен единый подвижный электрод. На основании и якоре размещена нормально разомкнутая пара контактов управляемой электрической цепи. В исходном состоянии якорь параллелен основанию, межэлектродное расстояние равно . При включении ММУ на неподвижные электроды попеременно подаются разноименные заряды, на подвижный электрод постоянный заряд одного знака. В процессе работы величина напряжения и знак зарядов неподвижных электродов циклически меняются, под действием активных электростатических сил якорь совершает возвратно-колебательное движение относительно оси деформируемых торсионов, осуществляя замыкание-размыкание контактов управляемых цепей. Межэлектродное расстояние по длине якоря становится переменным. Функционирование ММУ может осуществляться как при постоянной заданной частоте, так и в широком диапазоне частот. В обоих вариантах его надежность во многом определяется долговечностью элементов подвижной массы, которая особенно критична при частотах, близких или равных собственной (резонансной) частоте подвижной системы. Контроль возникновения резонансной частоты не предусмотрен, что ограничивает надежность и функциональные возможности ММУ. Наиболее близким по технической сущности является пороговый датчик в виде микромеханического электрореле (ММР) 2. Он содержит диэлектрическое основание с прямоугольной полостью, на коротких сторонах которой сформированы выступы. На них опирается подвижная масса в виде плоского жесткого прямоугольного диэлектрического якоря с упругими консольными держателями прямоугольного сечения, расположенными на выступах основания. На внутренних плоскостях полости и якоря сформированы неподвижный и подвижный электроды, а также нормально разомкнутые контакты управляемой цепи. Электроды остаются параллельны как в исходном состоянии, так и в процессе работы микрореле. Якорь держателями прижат к выступам упорами крышки, расположенной над якорем. В собранном виде держатели находятся в деформированном состоянии. При подаче на электроды разноименных потенциалов якорь под действием активных электростатических сил перемещается к основанию и замыкает нормально разомкнутые контакты. При отключении напряжения упругие реактивные силы держателей возвращают якорь и контакты в исходное положение. Таким образом, ММР работает в циклическом режиме широкого диапазона, определенного конкретными требованиями технического задания. Цикл задается электрической программой, реализуемой источником питания. Надежность и долговечность ММР во многом определяется механическими характеристиками элементов подвижной массы, работающих в условиях знакопеременных нагрузок. Резонанс, усталость материалов приводят к искажению рабочего цикла реле и даже к его разрушению. При этом источник питания будет продолжать запрограммированную подачу сигналов. Контроль выходных параметров не предусмотрен, что ограничивает функциональные возможности порогового датчика в виде ММР. 2 89652013.02.28 Технической задачей полезной модели является расширение функциональных возможностей порогового датчика в виде ММР за счет отслеживания резонанса подвижных элементов и его учета при проектировании ММР. Решение технической задачи достигается тем, что в емкостном датчике резонанса подвижных элементов в электростатическом микрореле, содержащем диэлектрические основание с прямоугольной полостью и выступами на ее дне, расположенную над ним крышку с вертикальной стенкой, а между ними подвижную массу, состоящую из якоря с упругими консольными держателями, сформированными на противоположных сторонах якоря, жестко соединенных с ним одними концами и свободно опирающимися другими концами на основание, неподвижный и подвижный тонкопленочные электроды на внутренних плоскостях полости и якоря с межэлектродным расстоянием , тонкопленочные нормально разомкнутые контакты и токопроводящие дорожки, сформированы емкостные обкладки с межобкладочным расстоянием, равным , при этом высота вертикальных стенок крышки выполнена равной , а на верхней плоскости основания сформированы пазы для свободных концов держателей. Емкостные обкладки расположены на противолежащих плоскостях крышки и якоря и выполнены прямоугольными. Емкостные обкладки расположены на противолежащих плоскостях полости основания и якоря и выполнены П-образной формы по периферии электродов. В зависимости от технических условий емкостные обкладки формируются в объеме между якорем и крышкой и П-образные - между якорем и основанием. Сущность полезной модели поясняется фигурами 1, 2. На фиг. 1 представлено продольное сечение по А-А, на котором 1 - основание, 2 - подвижная масса, 3 - крышка, 4 - полость, 5 - дно, 6 - выступ, 7 - якорь, 8 - держатель, 9 - паз,10 - неподвижный электрод (НЭ), 11 - подвижный электрод (ПЭ), 12 - межэлектродное расстояние, , 13 - тонкопленочный нормально разомкнутый контакт (НРК), 14 - емкостная П-образная обкладка, 15 - емкостная прямоугольная обкладка, 16 - межобкладочное расстояние, , 17 - вертикальная стенка. На фиг. 2 представлен вид сверху на якорь и основание. Емкостный датчик резонанса (ЕДР) подвижных элементов в электростатическом микрореле содержит диэлектрические прямоугольное основание 1, подвижную массу 2, крышку 3. В основании 1 выполнена (фиг. 1) прямоугольная полость 4, на дне 5 которой сформированы выступы 6. Подвижная масса 2 содержит жесткий якорь 7 с закрепленными в нем консольными упругими держателями 8, параллельными между собой и продольной оси ЕДР. Свободные концы держателей 8 опираются на дно пазов 9 в основании 1. Над якорем 7 установлена крышка 3 с вертикальной стенкой 17, фиксирующей положение держателей 8. Высота вертикальных стенок 17 крышки 3 выполнена равной . Межобкладочное расстояние 16 между крышкой 3 и якорем 7 равно межэлектродному расстоянию 12 величиной . На дне 5 и нижней стороне якоря 7 сформированы неподвижный (НЭ) 10 и подвижный(ПЭ) 11 тонкопленочные электроды с межэлектродным расстоянием 12, равным . На выступах 6 и напротив них на якоре 7 размещены тонкопленочные нормально разомкнутые контакты (НРК) 13. По ширине НЭ 10 и ПЭ 11 меньше, чем якорь. На свободных продольных краях якоря 7 и дна 5 расположены емкостные П-образные обкладки 14 (фиг. 2),изолированные от неподвижного 10 и подвижного 11 электродов. Емкостные прямоугольные обкладки 15 выполнены на обращенных друг к другу сторонах якоря 7 и крышки 3. Токопроводящие дорожки (позиция не указана) выполнены тонкослойными. Диэлектрические детали ЕДР могут быть выполнены из анодного оксида алюминия 23 электрохимическими методами. Электропроводящие элементы представляют собой тонкие пленки, полученные распылением металлов в вакууме. ЕДР работает следующим образом. При постоянной подаче циклического напряженияна НЭ 10 и ПЭ 11 в широком диапазоне частот на последних накапливаются разноименные заряды. Под действием сближающей активной электростатической силы , равной 3 3,(1) 2 2 ПЭ 11 начинает притягивать якорь 7 к НЭ 10, создавая в деформируемых держателях 8 равную реактивную механическую силу(2). В (1, 2) символы обозначают 0 - электрическая постоянная,- площадь электрода, - жесткость держателей,- смещение якоря 7. Управляемое перемещениев плоскопараллельных реле продолжается до/3 4,после чего равновесное состояние нарушается и якорь 7 коллапсирует в конечное положение, замыкая тонкопленочный НРК 13. По окончании импульса электрического напряжения силавозвращает якорь 7 в исходное положение, размыкая тонкопленочный НРК 13. Работа ЕДР продолжается в циклическом режиме и широком диапазоне частот, в том числе реально возможна и при частоте собственных колебанийподвижной массы 2, которая определяется соотношением 3, где- модуль упругости,- площадь поперечного сечения держателей 8,- подвижная масса 2,- длина держателей 8. Совпадение частот силиприводит к резонансу подвижной массы 2, который может исказить выходной сигнал относительно входного или разрушить конструкцию. Емкостимежду емкостными П-образными 14 и емкостными прямоугольными 15 обкладками конденсатора 3 зависят только от действительного изменения расстояния между элементами с подвижным 11 и неподвижным 10 электродами 0 ,(4)где- площадь обкладок. Реакция емкости конденсатора на изменение выходных импульсов по отношению к входным отслеживает работу ЕДР в опасной зоне резонанса, таким образом, обеспечивает обратную связь. Кинематика в диапазоне резонанса характеризуется увеличением амплитуды колебаний и симметричностью смещения подвижной массы под действием силыв одну сторону, а под действием силы- в другую. В результате обратной связи за счет емкостной реакции выполняется корректировка диапазона частот и механических параметров элементов с подвижными электродами 11, что в итоге расширяет функциональные возможности ЕДР. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: H01H 59/00
Метки: резонанса, датчик, микрореле, электростатическом, элементов, подвижных, емкостный
Код ссылки
<a href="https://by.patents.su/4-u8965-emkostnyjj-datchik-rezonansa-podvizhnyh-elementov-v-elektrostaticheskom-mikrorele.html" rel="bookmark" title="База патентов Беларуси">Емкостный датчик резонанса подвижных элементов в электростатическом микрореле</a>
Электростатическое микрореле
Номер патента: 9096
Опубликовано: 30.04.2007
Авторы: Ефремов Георгий Игнатьевич, Мухуров Николай Иванович, Котова Инна Федоровна
МПК: H01H 59/00
Метки: электростатическое, микрореле
Текст:
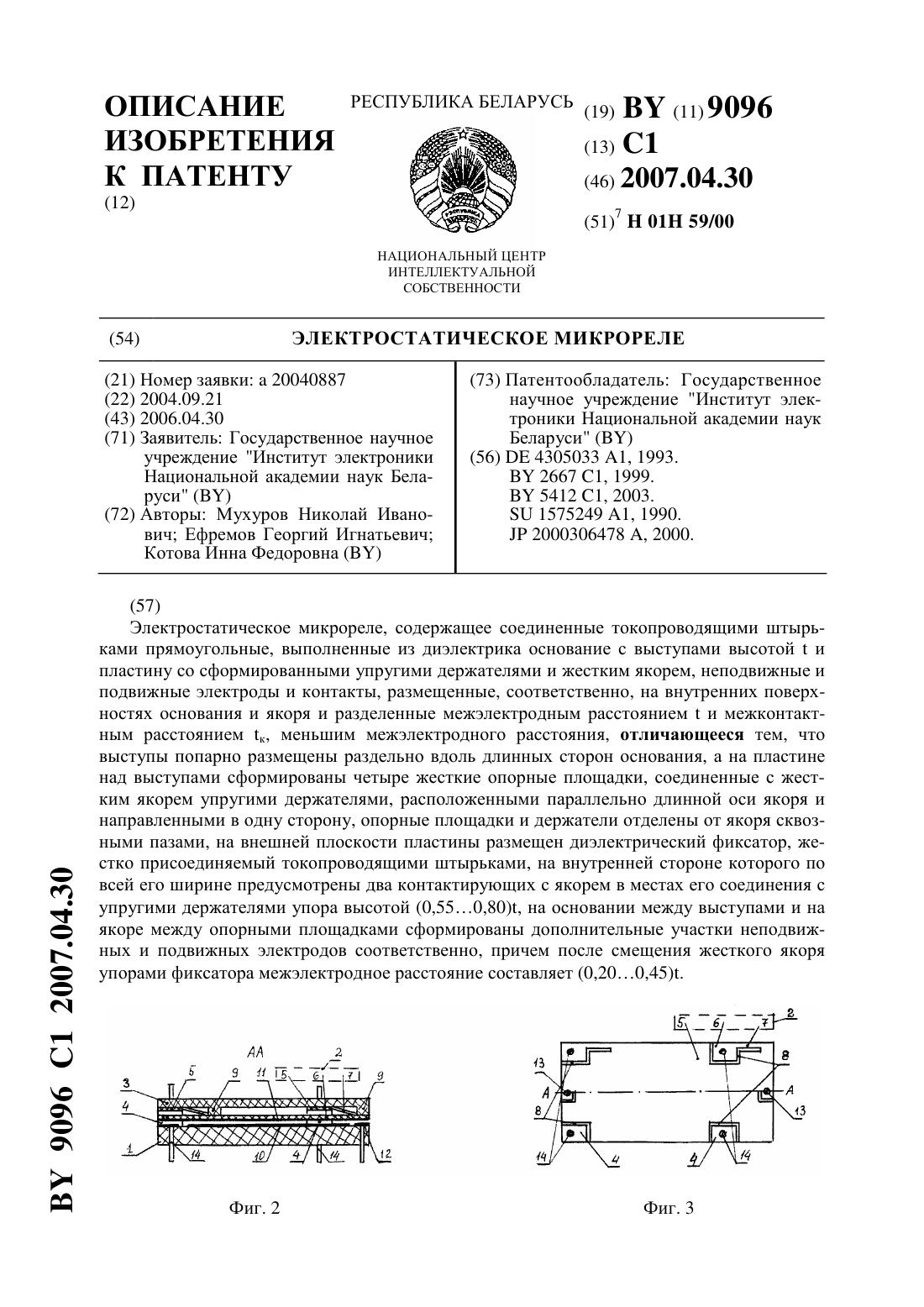
...ного расстояния, выступы попарно размещены раздельно вдоль длинных сторон основания, а на пластине над выступами сформированы четыре жесткие опорные площадки, соединенные с жестким якорем упругими держателями, расположенными параллельно длинной оси якоря и направленными в одну сторону, опорные площадки и держатели отделены от якоря сквозными пазами, на внешней плоскости пластины размещен диэлектрический фиксатор, жестко присоединенный...
Электростатическое микрореле
Номер патента: U 7290
Опубликовано: 30.06.2011
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: электростатическое, микрореле
Текст:
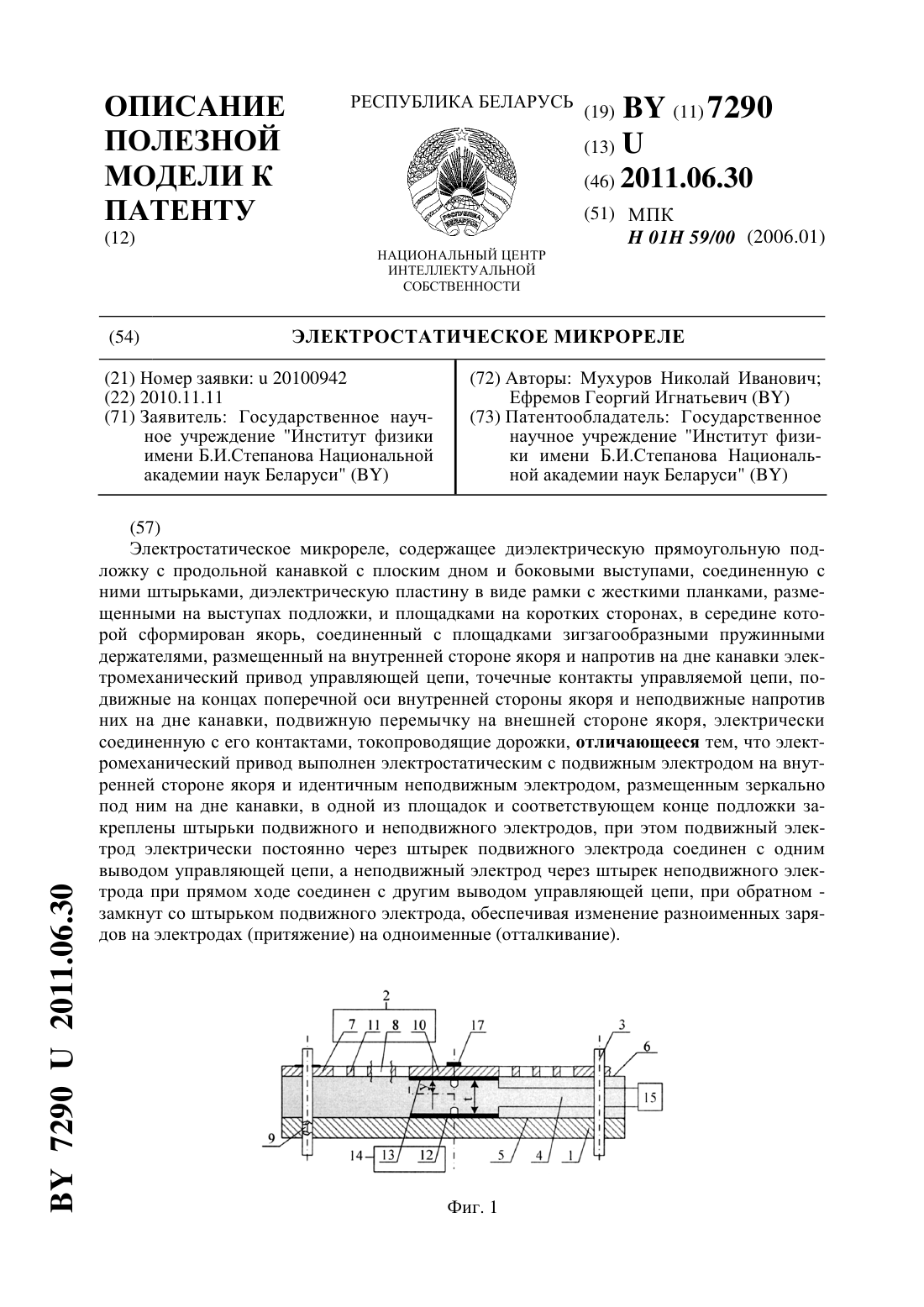
...функциональных возможностей. Решение технической задачи достигается тем, что в электростатическом микрореле,содержащем диэлектрическую прямоугольную подложку с продольной канавкой с плоским дном и боковыми выступами, соединенную с ними штырьками диэлектрическую пластину в виде рамки с жесткими планками, размещенными на выступах подложки, и площадками на коротких сторонах, в середине которой сформирован якорь, соединенный с площадками...
Низковольтное электростатическое микрореле
Номер патента: 5737
Опубликовано: 30.12.2003
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01H 59/00
Метки: электростатическое, микрореле, низковольтное
Текст:
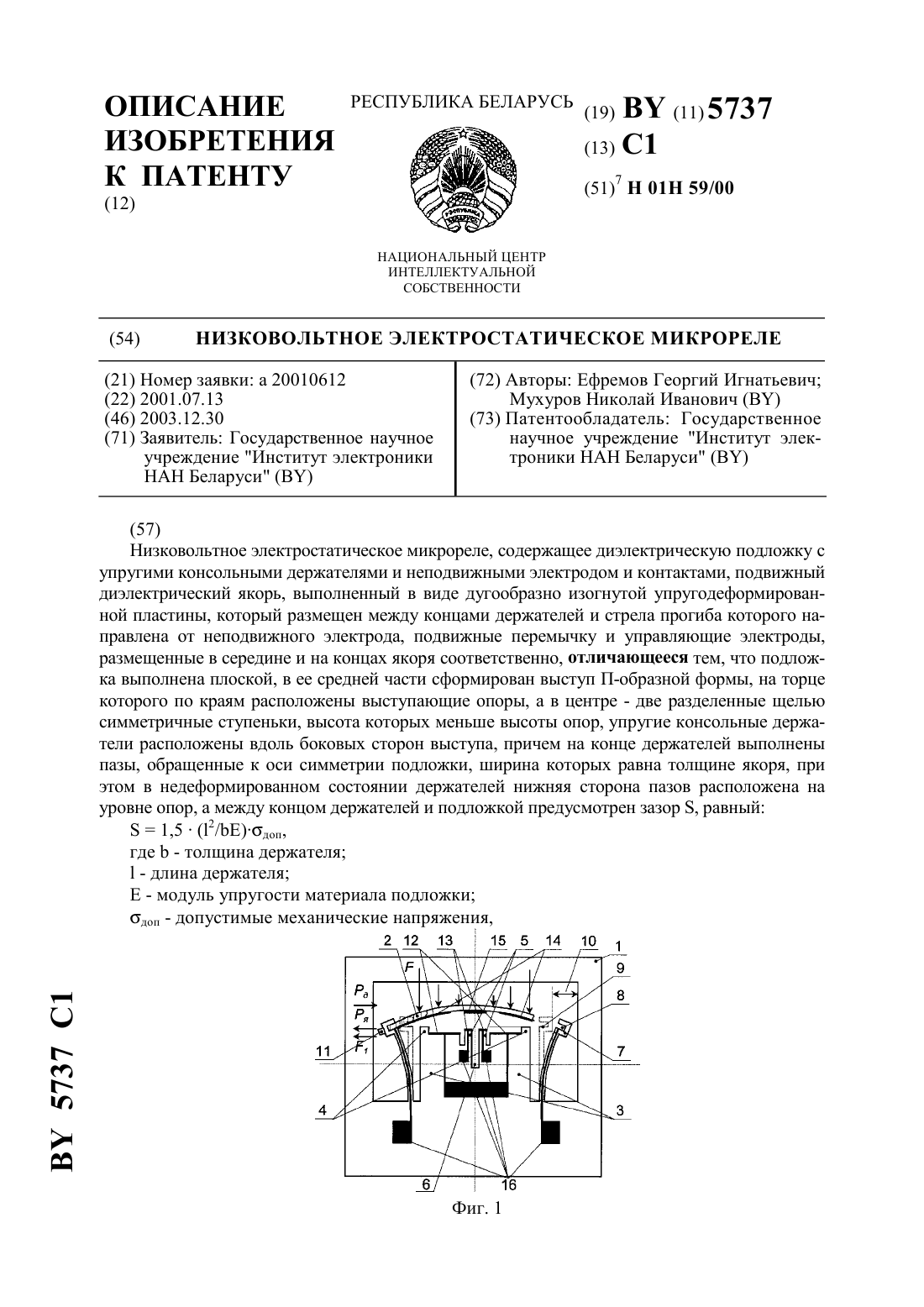
...перемычку и управляющие электроды, размещенные в середине и на концах якоря, соответственно, подложка выполнена плоской, в ее средней части сформирован выступ П-образной формы, на торце которого по краям расположены выступающие опоры, а в центре - две разделенные щелью симметричные ступеньки, высота которых меньше высоты опор, упругие консольные держатели расположены вдоль боковых сторон выступа, причем на конце держателей выполнены пазы,...
Планарное электростатическое микрореле

Номер патента: 9717
Опубликовано: 30.08.2007
Авторы: Мухуров Николай Иванович, Ефремов Георгий Игнатьевич
МПК: H01L 21/02, H01H 59/00
Метки: микрореле, планарное, электростатическое
Текст:
...1 - диэлектрическая подложка,2 - диэлектрический якорь,3 - паз,4 - диэлектрическая площадка,5 - неподвижный выступ,6 - параллельная сторона якоря,7 - поперечная сторона якоря,8 - подвижный выступ,9 - выступ,10 - лепесток,11 - неподвижный управляющий тонкопленочный электрод,12 - подвижный управляющий тонкопленочный электрод,13 - тонкопленочная контактная дорожка,14 - тонкопленочная контактная площадка,15 - подвижный тонкопленочный контакт...
Электромеханическое микрореле
Номер патента: 11941
Опубликовано: 30.06.2009
Авторы: Котова Инна Федоровна, Ефремов Георгий Игнатьевич, Мухуров Николай Иванович
МПК: H01H 59/00
Метки: микрореле, электромеханическое
Текст:
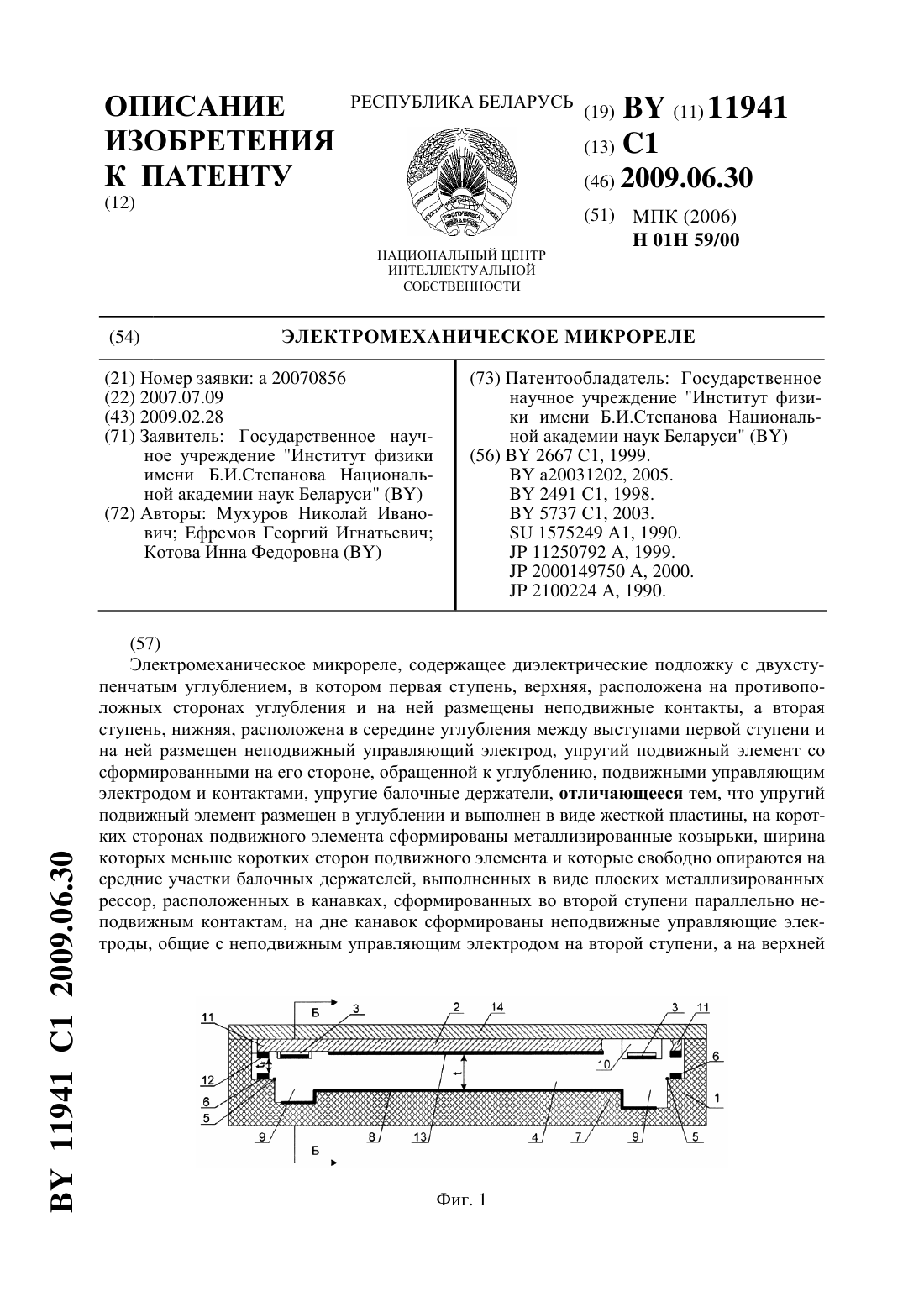
...во второй ступени параллельно неподвижным контактам, на дне канавок сформированы неподвижные управляющие электроды, общие с неподвижным управляющим электродом на второй ступени, а на верхней плоскости подложки соосно с канавками выполнены пазы, в которых размещены крайние участки балочных держателей, свободные от контакта с ко 3 11941 1 2009.06.30 зырьками, на свободных концах козырьков сформированы подвижные контакты в виде...
Предыдущий патент: Ручной культиватор-картофелекопатель
Следующий патент: Устройство для лечения врожденной косолапости у детей
Случайный патент: Состав для укрепления земляных откосов гидромелиоративных сооружений