Телескопическая вышка
Номер патента: U 5871
Опубликовано: 30.12.2009
Авторы: Кротиков Сергей Петрович, Алампиев Олег Александрович, Плясунов Александр Иванович, Титов Виктор Иванович, Андросенко Александр Павлович
Текст
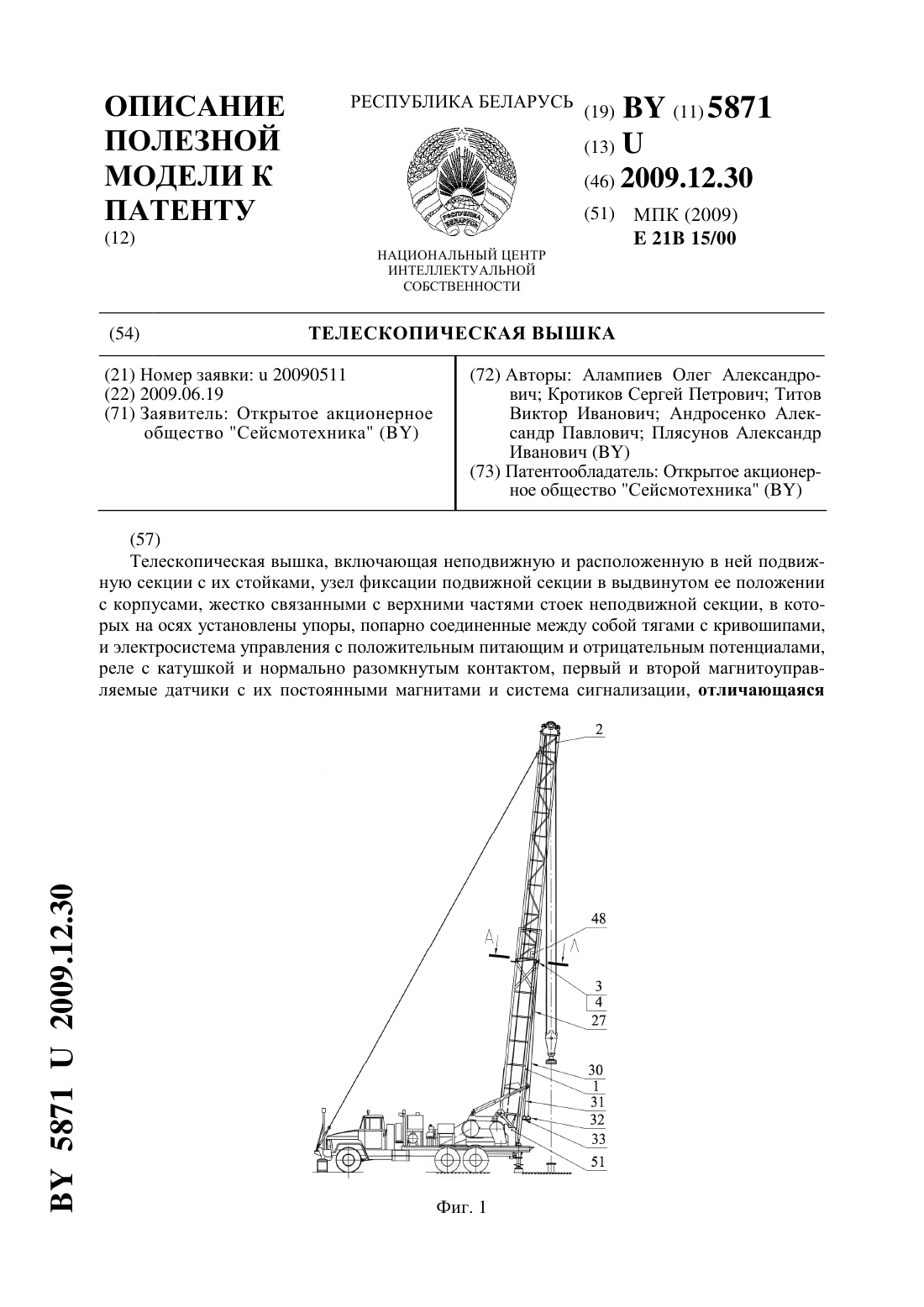
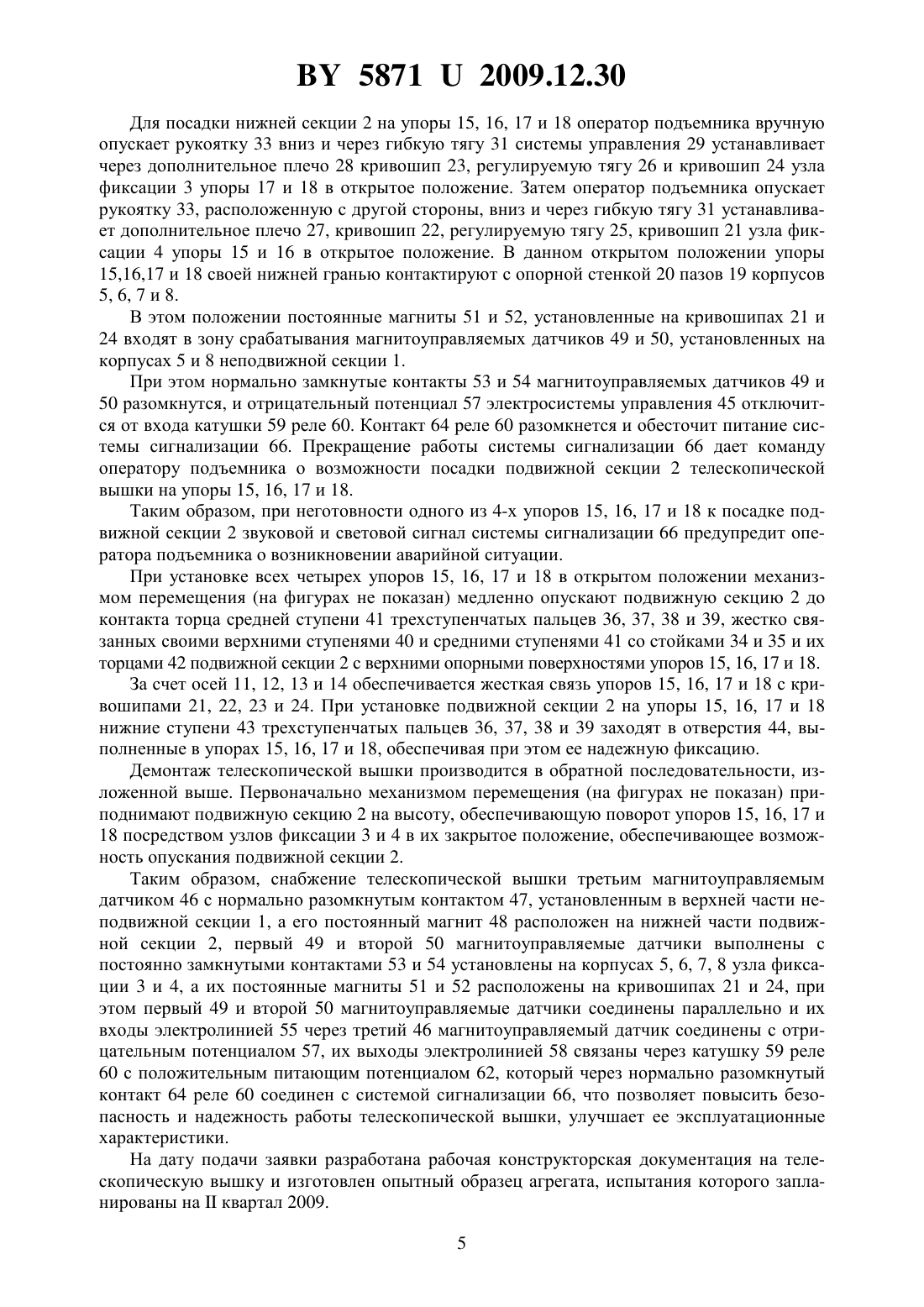
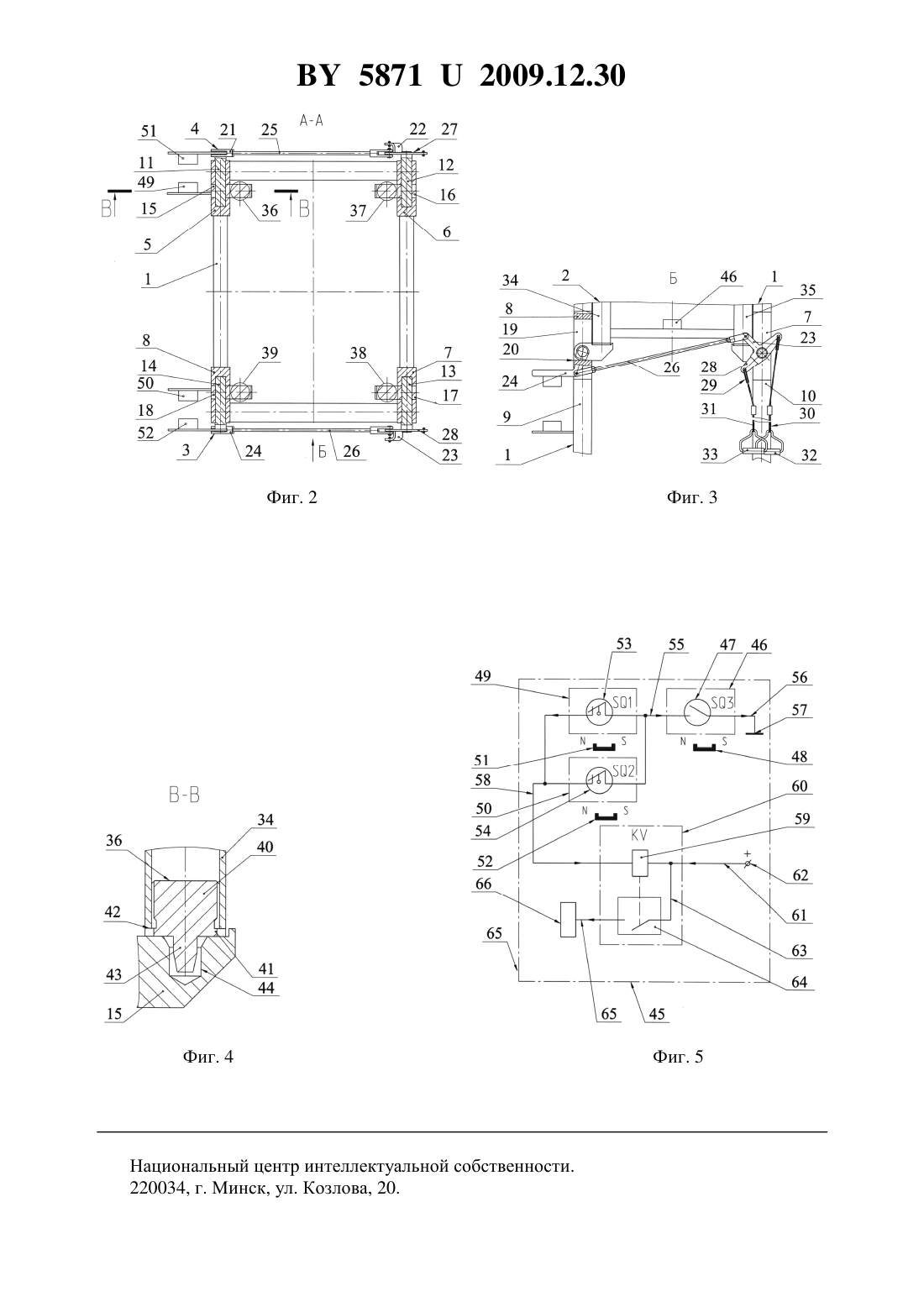
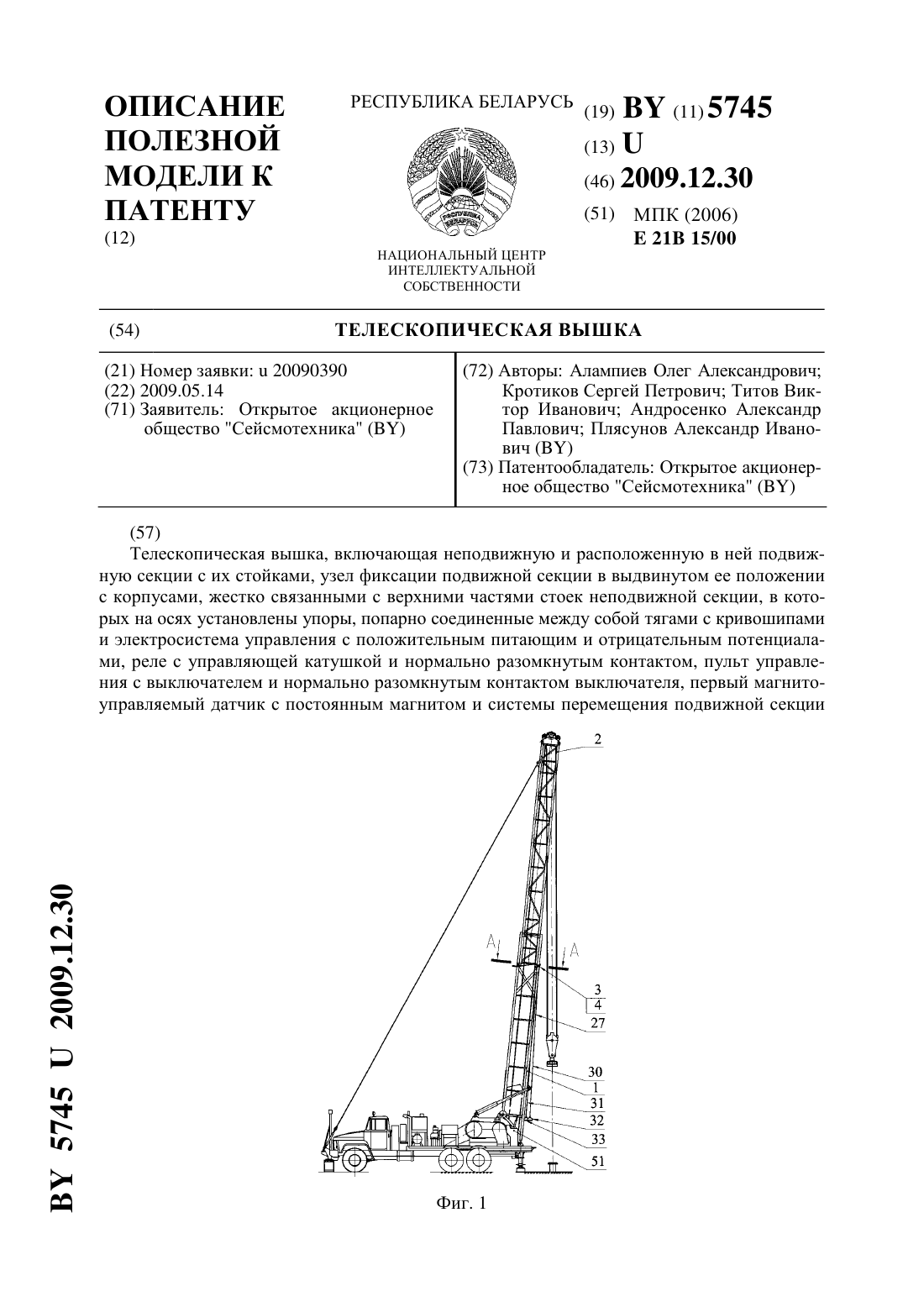
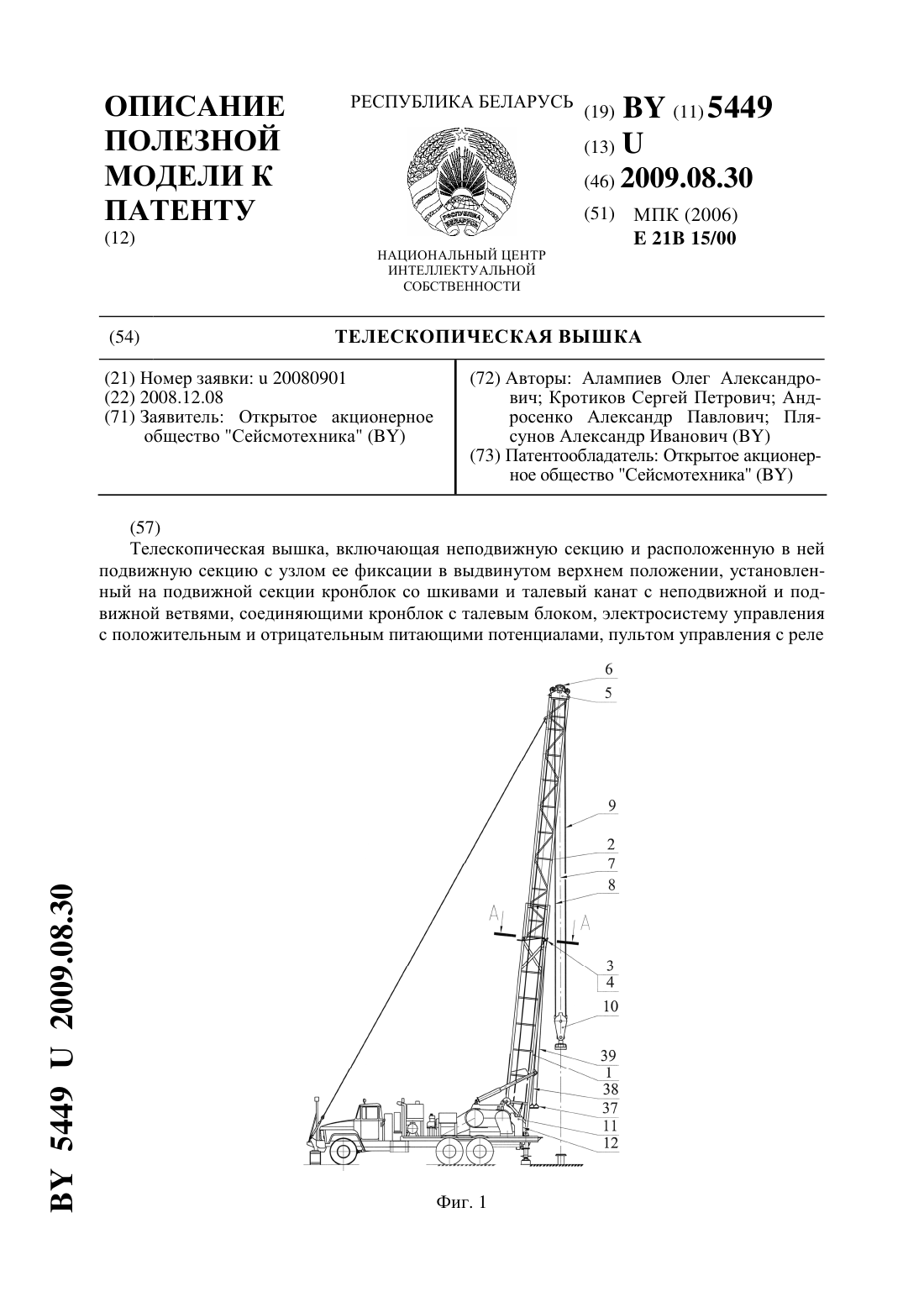
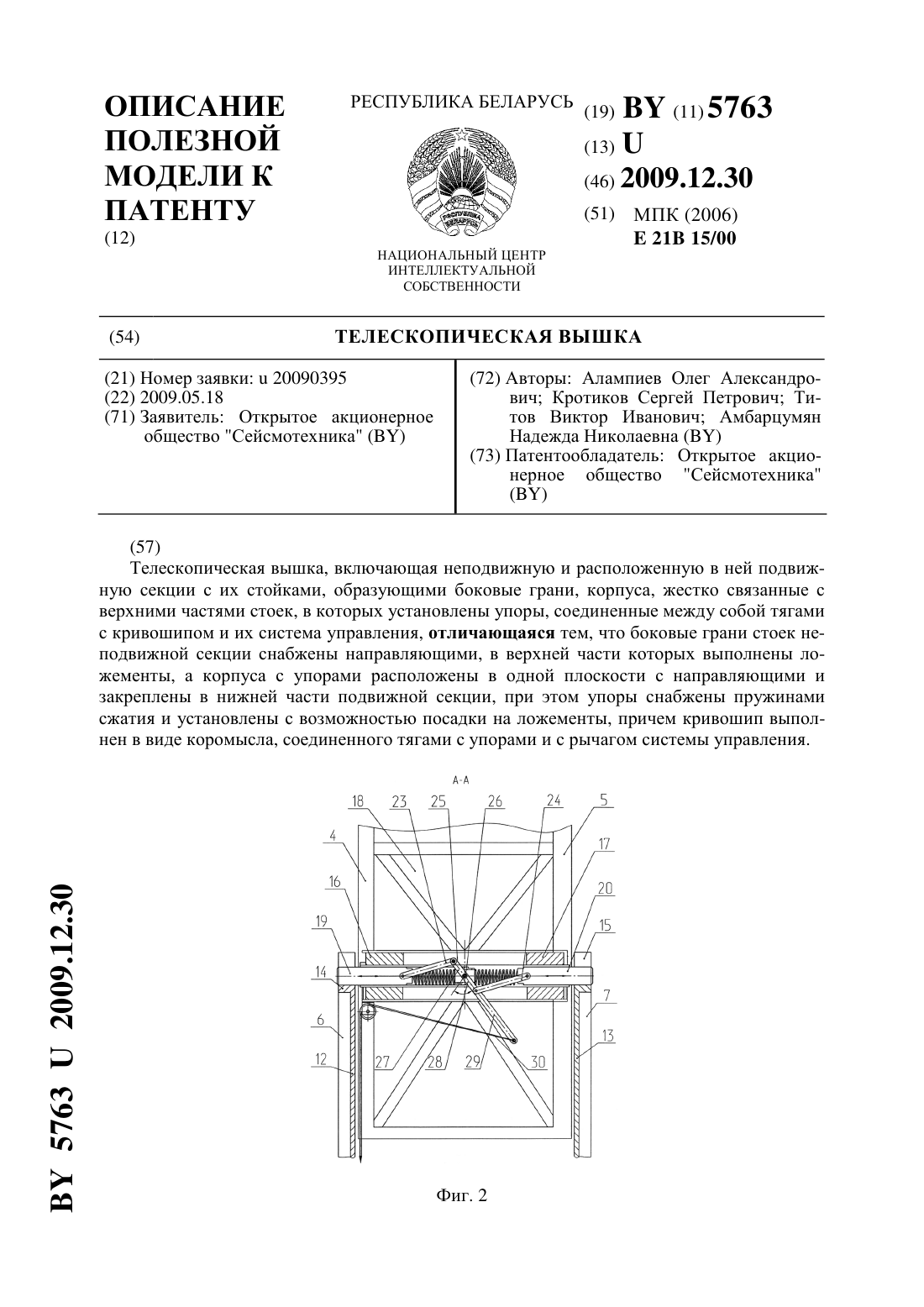
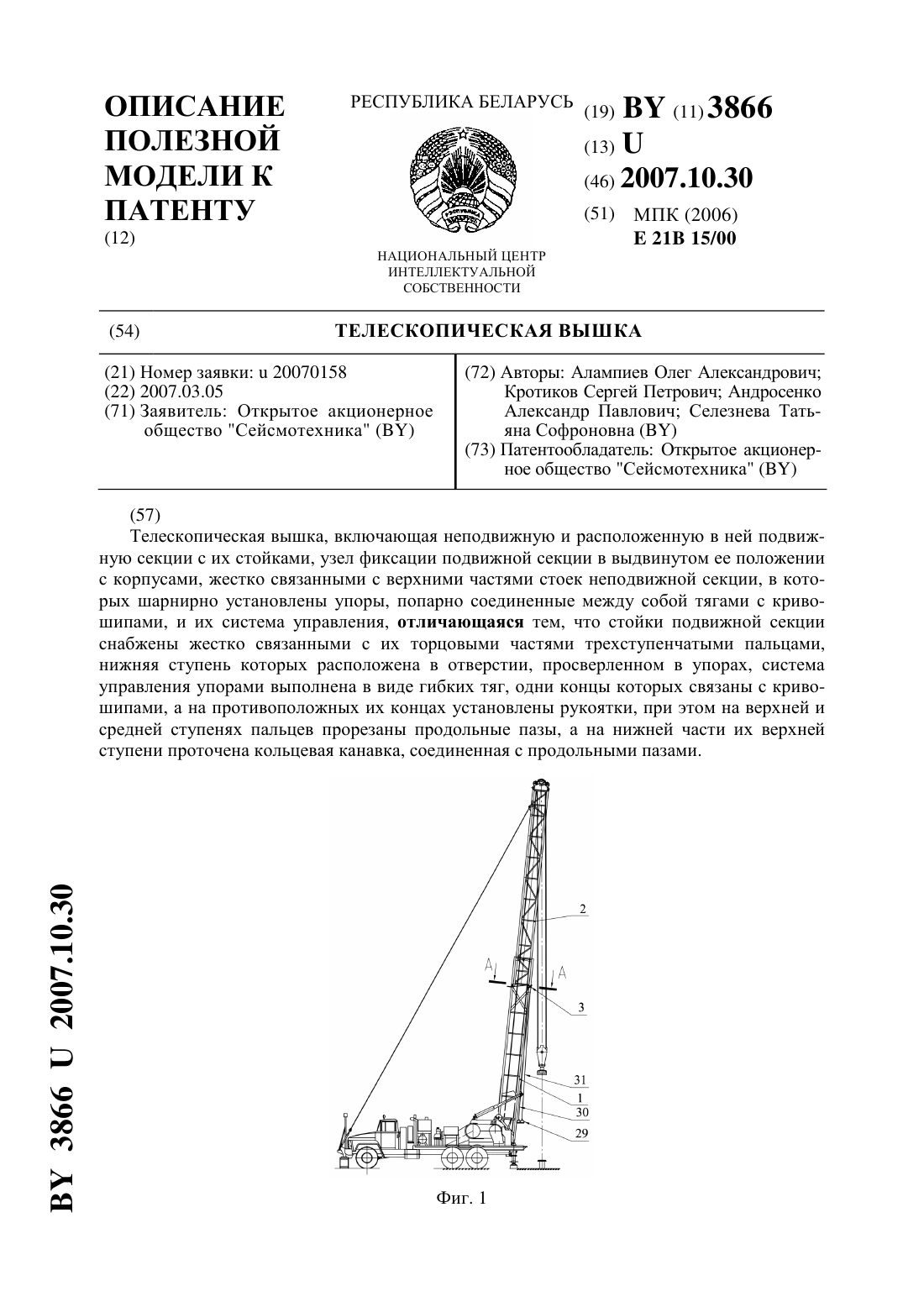
(51) МПК (2009) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ(71) Заявитель Открытое акционерное общество Сейсмотехника(72) Авторы Алампиев Олег Александрович Кротиков Сергей Петрович Титов Виктор Иванович Андросенко Александр Павлович Плясунов Александр Иванович(73) Патентообладатель Открытое акционерное общество Сейсмотехника(57) Телескопическая вышка, включающая неподвижную и расположенную в ней подвижную секции с их стойками, узел фиксации подвижной секции в выдвинутом ее положении с корпусами, жестко связанными с верхними частями стоек неподвижной секции, в которых на осях установлены упоры, попарно соединенные между собой тягами с кривошипами,и электросистема управления с положительным питающим и отрицательным потенциалами,реле с катушкой и нормально разомкнутым контактом, первый и второй магнитоуправляемые датчики с их постоянными магнитами и система сигнализации, отличающаяся 58712009.12.30 тем, что она снабжена третьим магнитоуправляемым датчиком с нормально разомкнутым контактом, установленным в верхней части неподвижной секции, а его постоянный магнит расположен на нижней части подвижной секции, первый и второй магнитоуправляемые датчики выполнены с постоянно замкнутыми контактами и установлены на корпусах узла фиксации, а их постоянные магниты расположены на кривошипах, при этом первый и второй магнитоуправляемые датчики соединены параллельно и их входы электролинией через третий магнитоуправляемый датчик соединены с отрицательным потенциалом, их выходы электролинией связаны через катушку реле с положительным питающим потенциалом, который через нормально разомкнутый контакт реле соединен с системой сигнализации.(56) 1. Инструкция по эксплуатации Агрегат АзИНМАШ-37 А. - М. Внешторгиздат, 1995. 2. Патент 4839, МПК Е 21 В 15/00, 2008. Полезная модель относится к бурению, освоению и ремонту скважин, а именно, к устройствам, снабженным телескопическими вышками. Известна телескопическая вышка 1, включающая неподвижную и подвижную секции, узел фиксации последней с подпружиненными упорами и кривошипами, соединенными между собой тягами, и систему управления упорами. Система управления упорами выполнена в виде мембранного пневмоцилиндра, трубопроводами через пневмораспределители соединенного с пневмосистемой транспортного средства. В транспортном положении, т.е. при сложенной вышке, подпружиненные упоры подвижной секцией удерживаются в закрытом положении. При выдвижении подвижной секции через пневмораспределитель подают в одну из полостей пневмоцилиндра воздух. Под действием давления воздуха мембрана пневмоцилиндра перемещает его шток и связанные с ним упоры в сторону их открытия, при этом сжимается пружина, установленная на упорах. После выдвижения подвижной секции, до требуемого положения, переключают пневмораспределитель, и поток сжатого воздуха поступает в противоположную полость пневмоцилиндра. Под действием давления сжатого воздуха, мембрана пневмоцилиндра и его шток перемещаются в обратную сторону, при этом перемещаются с ним подпружиненные упоры в сторону их закрытия. Затем приспускается подвижная секция до контакта ее основания с упорами. Недостатком данной телескопической вышки является то, что в ее конструкции отсутствуют контрольно-сигнализирующие устройства о положениях упоров, ухудшающие ее эксплуатационные характеристики. Из известных устройств наиболее близким по технической сущности к предлагаемому техническому решению и достигаемому результату является телескопическая вышка 2,включающая неподвижную и расположенную в ней подвижную секции и два узла фиксации подвижной секции в ее рабочем выдвинутом положении, расположенные симметрично с двух сторон вышки. Каждый узел фиксации подвижной секции содержит корпуса,жестко связанные с верхними частями стоек, в которых на осях установлены жестко соединенные с ними упоры. В каждом корпусе выполнены также пазы, обеспечивающие поворот и установку упоров вдоль корпусов в их нерабочем положении для свободного прохождения подвижной секции, а также установку их в рабочем положении, обеспечивающем фиксацию подвижной секции в выдвинутом рабочем положении. В этом случае нижней своей частью упоры контактируют с опорной стенкой пазов корпусов. 2 58712009.12.30 Упоры через их оси соответственно попарно соединены между собой через кривошипы и регулируемые тяги. Кривошипы имеют дополнительные плечи, соединенные системой управления упорами, выполненной в виде гибких тяг. Одни концы гибких тяг соединены с дополнительными плечами соответственно, а на противоположных концах установлены рукоятки. Данная телескопическая вышка снабжена электросистемой управления, включающей реле с управляющей катушкой и нормально замкнутыми контактами. Вход реле электролинией соединен с положительным питающим потенциалом электросистемы, выход управляющей катушки реле электролинией связан со входом магнитоуправляемого датчика, а его выход - электролинией соединен с отрицательным потенциалом корпуса. Магнитоуправляемый датчик установлен на нижней части стойки неподвижной секции, а его постоянный магнит закреплен на подвижной секции. Выход нормально замкнутых контактов реле электролинией соединен со входом нормально разомкнутого выключателя, пульта управления. Выход же нормально разомкнутого выключателя электролинией соединен с системой выдвижения подвижной секции. Недостатком данной телескопической вышки является то, что в ее конструкции отсутствуют контрольно-сигнализирующие устройства о состоянии положения упоров, т.е. они находятся в открытом или закрытом положениях, что ухудшает ее эксплуатационные характеристики. Техническая задача, на решение которой направлена заявляемая полезная модель, устранение вышеуказанных недостатков, а именно улучшение эксплуатационных характеристик. Решение технической задачи достигается тем, что телескопическая вышка, включающая неподвижную и расположенную в ней подвижную секции с их стойками, узел фиксации подвижной секции в выдвинутом ее положении с корпусами, жестко связанными с верхними частями стоек неподвижной секции, в которых шарнирно установлены упоры,попарно соединенные между собой тягами с кривошипами, и электросистема управления с положительным питающим и отрицательным потенциалами, реле с управляющей катушкой и нормально разомкнутым контактом, первый и второй магнитоуправляемые датчики с их постоянными магнитами и система сигнализации, снабжена третьим магнитоуправляемым датчиком с нормально разомкнутым контактом, установленным в верхней части неподвижной секции, а его постоянный магнит расположен на нижней части подвижной секции, первый и второй магнитоуправляемые датчики выполнены с постоянно замкнутыми контактами и установлены на корпусах узла фиксации, а их постоянные магниты расположены на кривошипах, при этом первый и второй магнитоуправляемые датчики соединены параллельно и их входы электролинией через третий магнитоуправляемый датчик соединены с отрицательным потенциалом, их выходы электролинией связаны через катушку реле с положительным питающим потенциалом, который через нормально разомкнутый контакт реле соединен с системой сигнализации. Сущность полезной модели поясняется чертежами, на которых представлены фиг. 1 общий вид изделия фиг. 2 - сечение А-А по фиг. 1 фиг. 3 - вид по стрелке Б на фиг. 2 фиг. 4 - сечение по В-В на фиг. 2 (повернуто) фиг. 5 - электросистема управления. Телескопическая вышка (фиг. 1, 2, 3 и 4) содержит неподвижную 1 и расположенную в ней подвижную 2 секции и два узла фиксации 3 и 4 подвижной секции 2 в ее рабочем выдвинутом положении, расположенные симметрично с двух сторон вышки. Каждый узел фиксации 3 и 4 подвижной секции 2 содержит корпуса 5, 6, 7 и 8, жестко связанные с верхними частями стоек 9 и 10, в которых на осях 11, 12, 13 и 14 установлены жестко соединенные с ними упоры 15, 16, 17 и 18. В каждом корпусе 5,6,7 и 8 выполнены также пазы 19, обеспечивающие поворот и установку упоров 15, 16, 17 и 18 вдоль корпусов 5, 6, 7 и 3 58712009.12.30 8 в их нерабочем закрытом положении для свободного прохождения подвижной секции 2,а также установку их в рабочем открытом положении, обеспечивающем фиксацию подвижной секции 2 в выдвинутом рабочем положении. В этом случае нижней своей частью упоры 15, 16, 17 и 18 (см. фиг. 2, 3) контактируют с опорной стенкой 20 пазов 19 корпусов 5, 6, 7 и 8. Упоры 15 и 16, 17 и 18 через их оси 11, 12, 13 и 14 соответственно попарно соединены между собой (фиг. 2 и 3) через кривошипы 21, 22, 23 и 24 и регулируемые тяги 25 и 26. Кривошипы 22 и 23 имеют дополнительные плечи 27 и 28, соединенные системой управления 29 упорами 15, 16, 17 и 18, выполненной в виде гибких тяг 30 и 31. Одни концы гибких тяг 30 и 31 соединены с дополнительными плечами 28 соответственно, а на противоположных концах установлены рукоятки 32 и 33. Нижние концы стоек 34 и 35 подвижной секции 2 снабжены в нижних их частях трехступенчатыми пальцами 36, 37, 38 и 39, верхние 40 (фиг. 4) ступени которых расположены внутри стоек 34 и 35, средние 41 ступени жестко связаны с торцами 42 стоек 34 и 35, а нижние 43 ступени располагаются в отверстиях 44, выполненных в упорах 15, 16, 17 и 18. Электросистема управления 45 (фиг. 5) включает третий 46 магнитоуправляемый датчик с нормально-разомкнутым контактом 47, расположенным на верхней части неподвижной секции 1 и его постоянным магнитом 48, закрепленным на нижней части подвижной секции 2, первый 49 и второй 50 магнитоуправляемые датчики с их постоянными магнитами 51 и 52 соответственно. Первый 49 и второй 50 магнитоуправляемые датчики установлены на корпусах 5 и 8 узла фиксации 3 и 4, а их постоянные магниты 51 и 52 жестко связаны с кривошипами 21 и 24 таким образом, что первый 49 и второй 50 магнитоуправляемые датчики срабатывают от взаимодействия их с постоянными магнитами 51 и 52 при закрытых положениях упоров 15 и 18. В исходном положении контакты 53 первого 49 и контакты 54 второго 50 магнитоуправляемых датчиков нормально закрыты, а входы этих датчиков электролинией 55 через контакт 47 третьего магнитоуправляемого датчика 46 и электролинию 56 соединена с отрицательным потенциалом 57. Выходы датчиков 49 и 50 электролинией 58 соединены с катушкой 59 реле 60 и электролинией 61 с положительным питающим потенциалом 62, который в свою очередь электролинией 63, нормально разомкнутый контакт 64 и электролинию 65 связан с системой сигнализации 66. Телескопическая вышка работает следующим образом. В транспортном положении, т.е. при сложенной телескопической вышке упоры 15, 16,17, 18 закрыты и располагаются в пазах 19 корпусов 5, 6, 7 и 8, жестко связанных с верхними частями стоек 9 и 10. При выдвижении механизмом перемещения (на фигурах не показан) подвижной секции 2 из неподвижной секции 1 узлы фиксации 3 и 4 не препятствуют перемещению вверх подвижной секции 2, которую выдвигают до положения, когда трехступенчатые пальцы 36, 37, 38 и39 располагаются выше упоров 15, 16, 17 и 18. При этом постоянный магнит 48 электросистемы управления 45 установленный на подвижной секции 2, подходит к третьему магнитоуправляемому датчику 46 с нормально разомкнутым контактом 47, установленному в верхней части неподвижной секции 1. Под действием магнитных сил постоянного магнита 48 нормально разомкнутые контакты 47 третьего магнитоуправляемого датчика 46 замкнутся и отрицательный питающий потенциал 57 по электролиниям 55 и 56 нормально замкнутым контактам 53 и 54 параллельно соединенных магнитоуправляемых датчиков 49 и 50 по электролиниям 58 подключится ко входу управляющей катушки 59 реле 60. Реле 60 включится и положительный питающий потенциал 62 по электролиниям 61 и 63, по замкнувшемуся контакту 64 и электролинии 65 подключится ко входу системы сигнализации 66. Звуковой и световой сигнал системы сигнализации 66 предупредит оператора подъемника о необходимости прекращения выдвижения подвижной секции 2 из неподвижной 1. При этом трехступенчатые пальцы 36,37,38 и 39 располагаются выше упоров 15, 16, 17 и 18. 4 58712009.12.30 Для посадки нижней секции 2 на упоры 15, 16, 17 и 18 оператор подъемника вручную опускает рукоятку 33 вниз и через гибкую тягу 31 системы управления 29 устанавливает через дополнительное плечо 28 кривошип 23, регулируемую тягу 26 и кривошип 24 узла фиксации 3 упоры 17 и 18 в открытое положение. Затем оператор подъемника опускает рукоятку 33, расположенную с другой стороны, вниз и через гибкую тягу 31 устанавливает дополнительное плечо 27, кривошип 22, регулируемую тягу 25, кривошип 21 узла фиксации 4 упоры 15 и 16 в открытое положение. В данном открытом положении упоры 15,16,17 и 18 своей нижней гранью контактируют с опорной стенкой 20 пазов 19 корпусов 5, 6, 7 и 8. В этом положении постоянные магниты 51 и 52, установленные на кривошипах 21 и 24 входят в зону срабатывания магнитоуправляемых датчиков 49 и 50, установленных на корпусах 5 и 8 неподвижной секции 1. При этом нормально замкнутые контакты 53 и 54 магнитоуправляемых датчиков 49 и 50 разомкнутся, и отрицательный потенциал 57 электросистемы управления 45 отключится от входа катушки 59 реле 60. Контакт 64 реле 60 разомкнется и обесточит питание системы сигнализации 66. Прекращение работы системы сигнализации 66 дает команду оператору подъемника о возможности посадки подвижной секции 2 телескопической вышки на упоры 15, 16, 17 и 18. Таким образом, при неготовности одного из 4-х упоров 15, 16, 17 и 18 к посадке подвижной секции 2 звуковой и световой сигнал системы сигнализации 66 предупредит оператора подъемника о возникновении аварийной ситуации. При установке всех четырех упоров 15, 16, 17 и 18 в открытом положении механизмом перемещения (на фигурах не показан) медленно опускают подвижную секцию 2 до контакта торца средней ступени 41 трехступенчатых пальцев 36, 37, 38 и 39, жестко связанных своими верхними ступенями 40 и средними ступенями 41 со стойками 34 и 35 и их торцами 42 подвижной секции 2 с верхними опорными поверхностями упоров 15, 16, 17 и 18. За счет осей 11, 12, 13 и 14 обеспечивается жесткая связь упоров 15, 16, 17 и 18 с кривошипами 21, 22, 23 и 24. При установке подвижной секции 2 на упоры 15, 16, 17 и 18 нижние ступени 43 трехступенчатых пальцев 36, 37, 38 и 39 заходят в отверстия 44, выполненные в упорах 15, 16, 17 и 18, обеспечивая при этом ее надежную фиксацию. Демонтаж телескопической вышки производится в обратной последовательности, изложенной выше. Первоначально механизмом перемещения (на фигурах не показан) приподнимают подвижную секцию 2 на высоту, обеспечивающую поворот упоров 15, 16, 17 и 18 посредством узлов фиксации 3 и 4 в их закрытое положение, обеспечивающее возможность опускания подвижной секции 2. Таким образом, снабжение телескопической вышки третьим магнитоуправляемым датчиком 46 с нормально разомкнутым контактом 47, установленным в верхней части неподвижной секции 1, а его постоянный магнит 48 расположен на нижней части подвижной секции 2, первый 49 и второй 50 магнитоуправляемые датчики выполнены с постоянно замкнутыми контактами 53 и 54 установлены на корпусах 5, 6, 7, 8 узла фиксации 3 и 4, а их постоянные магниты 51 и 52 расположены на кривошипах 21 и 24, при этом первый 49 и второй 50 магнитоуправляемые датчики соединены параллельно и их входы электролинией 55 через третий 46 магнитоуправляемый датчик соединены с отрицательным потенциалом 57, их выходы электролинией 58 связаны через катушку 59 реле 60 с положительным питающим потенциалом 62, который через нормально разомкнутый контакт 64 реле 60 соединен с системой сигнализации 66, что позволяет повысить безопасность и надежность работы телескопической вышки, улучшает ее эксплуатационные характеристики. На дату подачи заявки разработана рабочая конструкторская документация на телескопическую вышку и изготовлен опытный образец агрегата, испытания которого запланированы наквартал 2009. 5 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: E21B 15/00
Метки: телескопическая, вышка
Код ссылки
<a href="https://by.patents.su/6-u5871-teleskopicheskaya-vyshka.html" rel="bookmark" title="База патентов Беларуси">Телескопическая вышка</a>
Телескопическая вышка
Номер патента: U 5745
Опубликовано: 30.12.2009
Авторы: Кротиков Сергей Петрович, Плясунов Александр Иванович, Алампиев Олег Александрович, Титов Виктор Иванович, Андросенко Александр Павлович
МПК: E21B 15/00
Метки: телескопическая, вышка
Текст:
...подвижной секции в выдвинутом ее положении с корпусами, жестко связанными с верхними частями стоек неподвижной секции, в которых шарнирно установлены упоры,попарно соединенные между собой тягами с кривошипами и электросистема управления с положительным питающим и отрицательным потенциалами, реле с управляющей катушкой и нормально разомкнутым контактом, пульт управления с выключателем и нормально разомкнутым контактом выключателя, первый...
Телескопическая вышка
Номер патента: U 4839
Опубликовано: 30.12.2008
Авторы: Плясунов Александр Иванович, Андросенко Александр Павлович, Титов Виктор Иванович, Алампиев Олег Александрович
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...с управляющей катушкой и нормально замкнутыми контактами, пульт управления с нормально разомкнутыми контактами выключателя и магнитоуправляемый датчик с постоянным магнитом, расположенным на нижней части стойки подвижной секции, а магнитоуправляемый датчик установлен на неподвижной секции мачты выше оси поворота упоров, при этом вход реле блокировки связан с положительным питающим потенциалом электросистемы, выход реле блокировки...
Телескопическая вышка
Номер патента: U 5449
Опубликовано: 30.08.2009
Авторы: Алампиев Олег Александрович, Плясунов Александр Иванович, Кротиков Сергей Петрович, Андросенко Александр Павлович
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...барабана лебедки за счет наматывания на него подвижного конца талевой системы производят спуско-подъемные операции. Для демонтажа устройства механизмом подъема подвижную секцию приподнимают в верхнее положение, после чего рукоятки перемещают вниз и через гибкие тяги поворачивают кривошипы в обратную сторону. Вместе с кривошипами и жестко связанными с ними посредством осей упорами последние поворачиваются на 90 и располагаются в пазах...
Телескопическая вышка
Номер патента: U 5763
Опубликовано: 30.12.2009
Авторы: Титов Виктор Иванович, Алампиев Олег Александрович, Кротиков Сергей Петрович, Амбарцумян Надежда Николаевна
МПК: E21B 15/00
Метки: вышка, телескопическая
Текст:
...с верхними частями стоек, в которых установлены упоры, соединены между собой тягами с кривошипами и их система управления, причем боковые грани стоек неподвижной секции снабжены направляющими, в верхней части которых выполнены ложементы, а корпуса с упорами расположены в одной плоскости с направляющими и закреплены в нижней части подвижной секции, при этом упоры снабжены пружинами сжатия и установлены с возможностью посадки на...
Телескопическая вышка
Номер патента: U 3866
Опубликовано: 30.10.2007
Авторы: Селезнева Татьяна Софроновна, Андросенко Александр Павлович, Алампиев Олег Александрович, Кротиков Сергей Петрович
МПК: E21B 15/00
Метки: телескопическая, вышка
Текст:
...упоры. Этот процесс настройки рабочей поверхности копира относительно ролика коромысла является достаточно сложной операцией регулирования, что снижает надежность работы узла фиксации. 3 38662007.10.30 Другим недостатком данной конструкции является также то, что в данной конструкции отсутствуют устройства, позволяющие обеспечить удаление конденсата из нижних частей трубчатых стоек подвижной секции вышки. Наличие конденсата в нижних частях...
Предыдущий патент: Шпиндельный узел полировально-доводочного станка обработки оптических линз
Следующий патент: Устройство для поверки ядерно-резонансных магнитометров с преобразователями для измерения магнитных полей в соленоидах
Случайный патент: Магнито-емкостной индикатор загрязнения масла в автотракторных двигателях