Автоматизированный дистанционно управляемый комплекс огневого поражения
Номер патента: U 4961
Опубликовано: 30.12.2008
Авторы: Козлов Валерий Степанович, Вильчиков Александр Иванович, Войтенков Александр Сергеевич
Текст
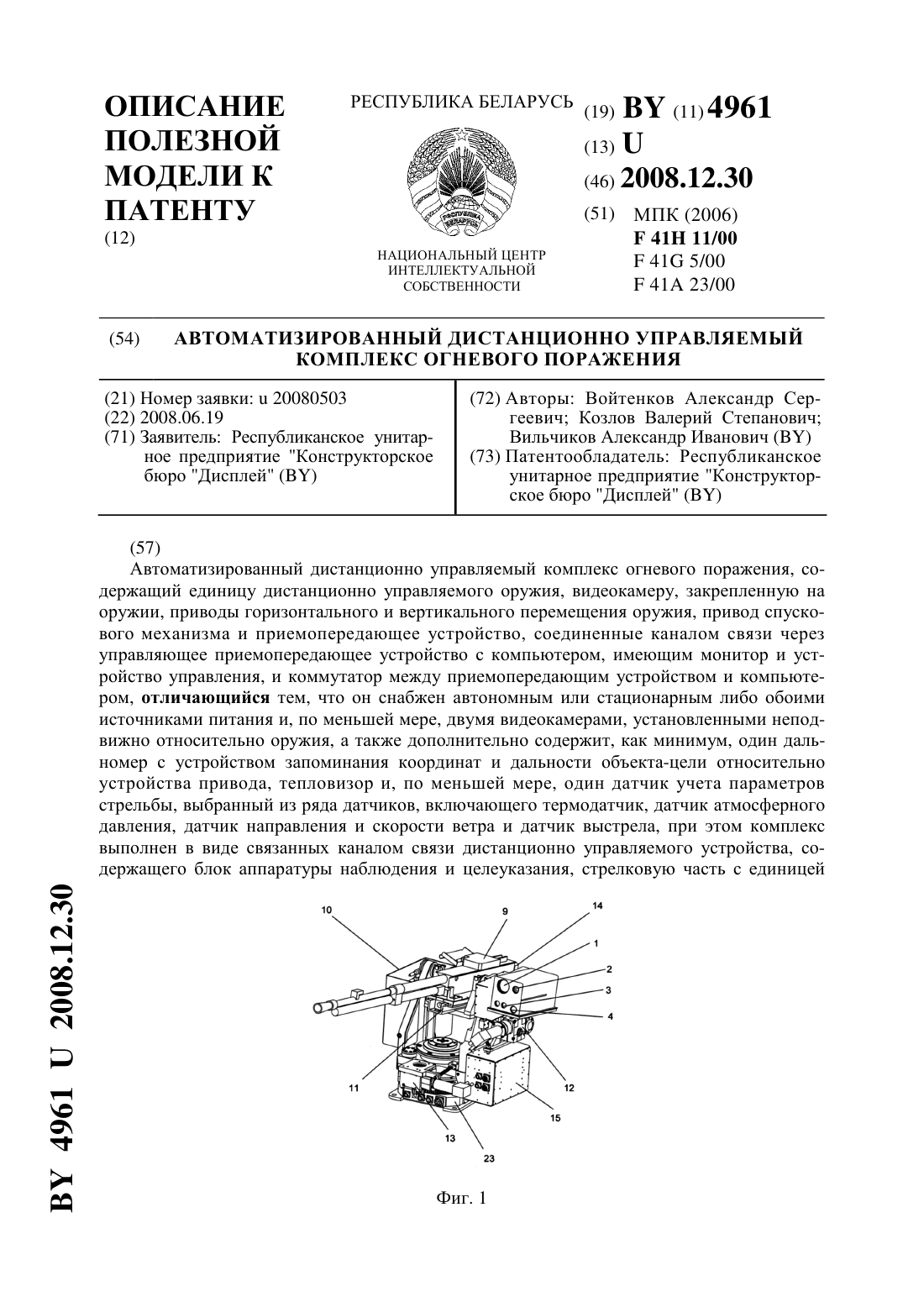
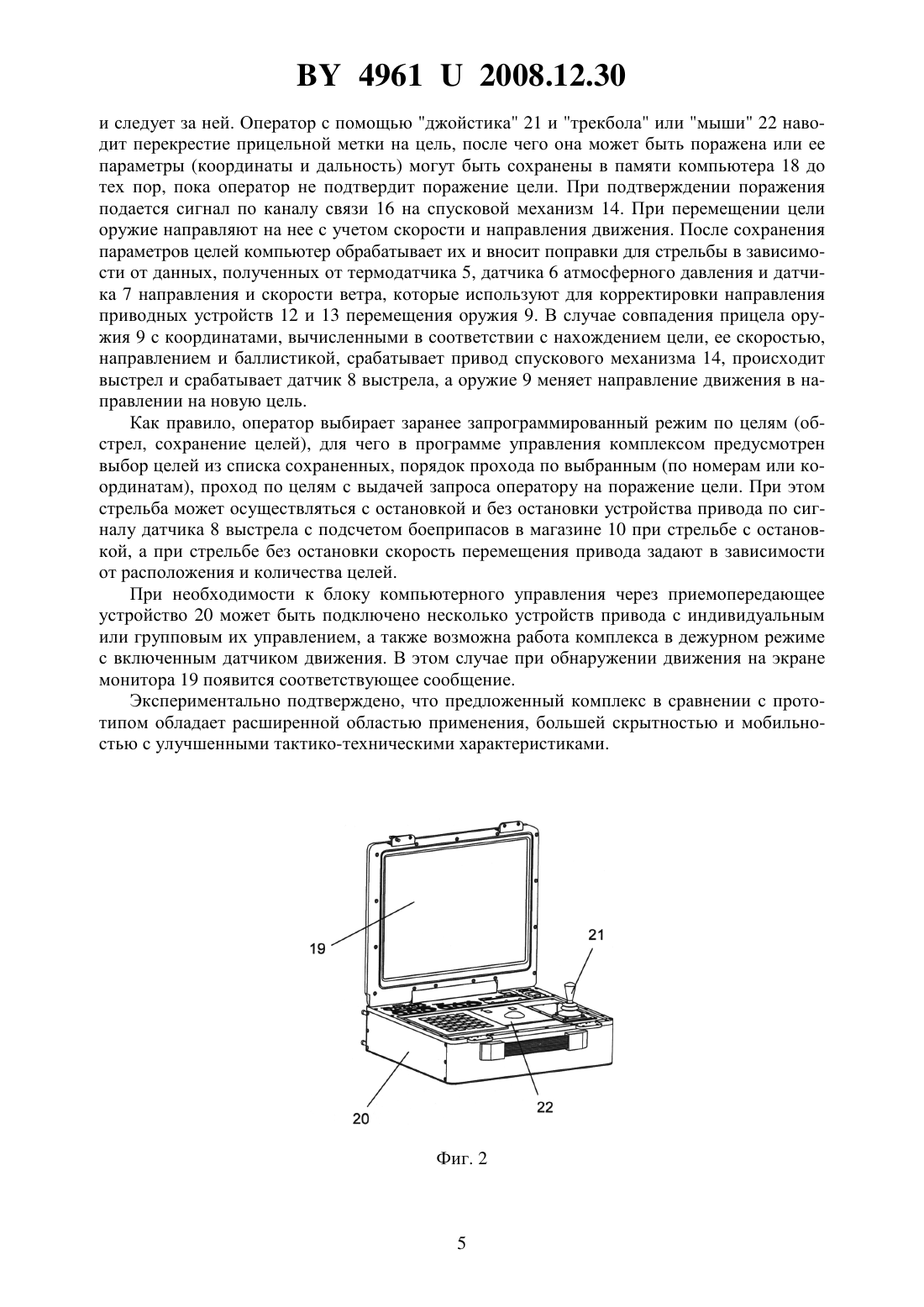
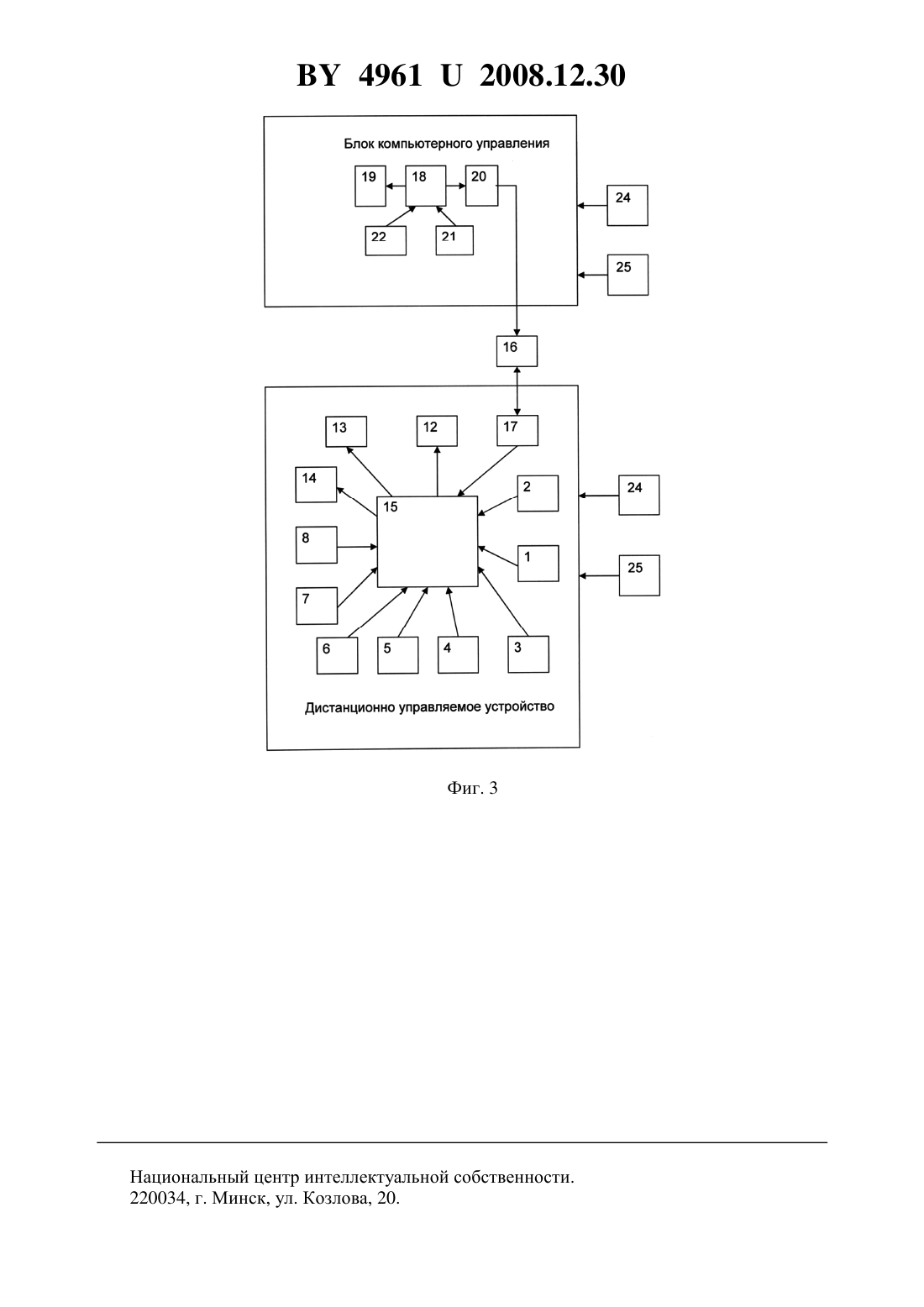
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ КОМПЛЕКС ОГНЕВОГО ПОРАЖЕНИЯ(71) Заявитель Республиканское унитарное предприятие Конструкторское бюро Дисплей(72) Авторы Войтенков Александр Сергеевич Козлов Валерий Степанович Вильчиков Александр Иванович(73) Патентообладатель Республиканское унитарное предприятие Конструкторское бюро Дисплей(57) Автоматизированный дистанционно управляемый комплекс огневого поражения, содержащий единицу дистанционно управляемого оружия, видеокамеру, закрепленную на оружии, приводы горизонтального и вертикального перемещения оружия, привод спускового механизма и приемопередающее устройство, соединенные каналом связи через управляющее приемопередающее устройство с компьютером, имеющим монитор и устройство управления, и коммутатор между приемопередающим устройством и компьютером, отличающийся тем, что он снабжен автономным или стационарным либо обоими источниками питания и, по меньшей мере, двумя видеокамерами, установленными неподвижно относительно оружия, а также дополнительно содержит, как минимум, один дальномер с устройством запоминания координат и дальности объекта-цели относительно устройства привода, тепловизор и, по меньшей мере, один датчик учета параметров стрельбы, выбранный из ряда датчиков, включающего термодатчик, датчик атмосферного давления, датчик направления и скорости ветра и датчик выстрела, при этом комплекс выполнен в виде связанных каналом связи дистанционно управляемого устройства, содержащего блок аппаратуры наблюдения и целеуказания, стрелковую часть с единицей 49612008.12.30 стрелкового или иного вида ствольного оружия, имеющего магазин для боеприпасов,сменную платформу с устройством амортизации отката для установки различных видов оружия и стационарным или мобильным каркасом-основанием для размещения аппаратуры, перемещения и установки на боевой позиции, приводные устройства перемещения стрелковой части, блок управления и сопряжения с каналом связи, и блока компьютерного управления, содержащего компьютер со встроенными датчиком координат и скорости объекта-цели относительно дистанционно управляемого устройства, датчиком движения за объектом-целью, датчиком признака объекта-цели и устройство управления, например джойстик либо графический манипулятор мышь или трекбол, или с каждым из них одновременно, причем компьютер выполнен с возможностью программного запоминания изображения местности накадров, их сшивки и слежения за объектом-целью.(56) 1.2 270973 С 2, МПК 47 Н 11/00, 2006. Полезная модель относится к области военной техники, в частности к автоматизированному вооружению с дистанционным управлением, и может быть использована для обнаружения и поражения различных целей при боевых действиях. Известна наиболее близкая по технической сути к полезной модели система дистанционного управления охраной и обороной периметра объекта 1, включающая, по меньшей мере, одно устройство дистанционного управления, содержащее, как минимум, единицу дистанционно управляемого стрелкового оружия, установленную стационарно, содержащую блок управления, закрепленную на оружии видеокамеру с трансфакатором, оптическим прицелом и лазерным целеуказателем, приводы вертикального и горизонтального перемещения, привод спускового механизма и приемопередающее устройство, соединенные каналом связи через управляющее приемопередающее устройство с компьютером,имеющим монитор и устройство управления, например джойстик, а между приемопередающим устройством и компьютером подключены мультиплексор и коммутатор. Данная система предназначена для ведения охраны и обороны периметра стационарного объекта с использованием дистанционно управляемого стрелкового оружия и позволяет повысить эффективность стрельбы и обороны, а также улучшить условия дежурства при охране и практически исключить потери личного состава (охранников). Существенным недостатком этой системы является то, что она, в силу присущих ей конструктивных особенностей, например наличия столбов-вышек для стационарной установки, одной видеокамеры, а также отсутствия дальномера, приборов учета баллистики и метеоусловий, различных параметров цели (скорость, дальность, местоположение и др.),обладает ограниченной областью применения, т.е. только для охраны и обороны стационарного объекта, практически нулевой скрытностью и мобильностью при смене позиции,а также не позволяет вести охрану и оборону в автоматическом режиме, что ограничивает возможность улучшения тактико-технических характеристик и боевой применимости дистанционно управляемого оружия. Технической задачей, на решение которой направлена полезная модель, является создание автоматизированного дистанционно управляемого комплекса огневого поражения,обладающего расширенной областью применения, например для поражения живой силы,техники и других целей, высокой скрытностью и мобильностью при смене позиции и обеспечивающего существенные улучшения тактико-технических и боевых характеристик путем возможности обнаружения и поражения цели в автоматическом режиме и в сложных метеоусловиях, повышения точности и скорости прицеливания по различным видам целей, увеличения угла обзора и прицельной дальности, осуществления стрельбы по не 2 49612008.12.30 скольким целям с остановкой и без остановки устройства привода, с компенсацией кучности и поправкой на скорость, а также применением различных типов оружия (пулемет,гранатомет и др.) и использованием стационарного или мобильного каркаса-основания. Поставленная задача обеспечивается тем, что при использовании существенных признаков, характеризующих известный автоматизированный дистанционно управляемый комплекс огневого поражения, который содержит единицу дистанционно управляемого оружия, видеокамеру, закрепленную на оружии, приводы вертикального и горизонтального перемещения, привод спускового механизма и приемопередающее устройство, связанные каналом связи через управляющее приемопередающее устройство с компьютером,имеющим монитор и устройство управления, и коммутатор между приемопередающим устройством и компьютером, в соответствии с полезной моделью, он снабжен автономным или стационарным либо обоими источниками питания и, по меньшей мере двумя видеокамерами, установленными неподвижно относительно оружия, а также дополнительно содержит, как минимум, один дальномер с устройством запоминания координат и дальности объекта-цели относительно устройства привода, тепловизор и, по меньшей мере, один датчик учета параметров стрельбы, выбранный из ряда датчиков, включающего термодатчик, датчик атмосферного давления, датчик направления и скорости ветра и датчик выстрела, при этом комплекс выполнен в виде связанных каналом связи дистанционно управляемого устройства, содержащего блок аппаратуры наблюдения и целеуказания,стрелковую часть с единицей стрелкового или иного вида ствольного оружия, имеющего магазин для боеприпасов, приводные устройства перемещения стрелковой части, сменную платформу с устройством амортизации отката для установки различных видов оружия и стационарный или мобильный каркас-основание для размещения аппаратуры, перемещения и установки на боевой позиции, блок управления и сопряжения с каналом связи, и компьютера со встроенными датчиком координат и скорости объекта-цели относительно дистанционно управляемого устройства, датчиком движения за объектом-целью, датчиком признака объекта-цели и устройством управления, например джойстик либо графический манипулятор мышь или трекбол, или с каждым из них одновременно, причем компьютер выполнен с возможностью программного запоминания изображения местности на -кадров, их сшивки и слежения за объектом-целью. Сопоставительный анализ показывает, что предлагаемый комплекс огневого поражения отличается от прототипа наличием двух видеокамер, дальномера, тепловизора, устройств и датчиков учета параметров объекта-цели и стрельбы, а также наличием автономного блока питания, графического манипулятора (мышь или трекбол), съемной платформы с устройством амортизации (отката) и стационарного или мобильного каркаса-основания,что свидетельствует о наличии признаков, отличающих заявленную полезную модель от прототипа. В данном случае выполнение комплекса без мачтового возвышения, оснащение автономным источником питания и стационарным или мобильным каркасом-основанием обеспечивает скрытность и мобильность при установке и смене боевой позиции. При этом наличие сменной платформы позволяет применять различные типы оружия, а устройство амортизации (отката) повышает кучность стрельбы. Использование двух и более видеокамер с различными углами обзора и устройства запоминания изображения накадрах и их сшивки обеспечивает более высокие скорость, дальность и точность прицеливания с одновременной возможностью обеспечения широкого поля зрения, скрытность, а также надежность всего комплекса за счет возможности дублирования видеокамер. Введение тепловизора способствует обнаружению и поражению целей в условиях ограниченной видимости (ночное время, атмосферные осадки, туман, растительность). Кроме того, введение датчиков учета параметров цели и стрельбы (термодатчика, датчика атмосферного давления, датчика направления и скорости ветра, датчика координат и скорости объектацели, датчика выстрела), дальномера и вычислителя повышает точность и скорость пора 3 49612008.12.30 жения целей, в том числе в автоматическом режиме, с учетом баллистики, скорости цели и погодных факторов. Применение графического манипулятора (мышь или трекбол) повышает скорость наведения на цель. При этом оснащение компьютера датчиками признака цели, движения и системой слежения за целью обеспечивает обнаружение и поражение в автоматическом режиме, что в целом повышает тактико-технические и боевые характеристики, расширяет область применения комплекса, свидетельствует о достижении более высокого технического результата и промышленной применимости комплекса. Техническая сущность полезной модели поясняется прилагаемым чертежом, где на фиг. 1 показан общий вид дистанционно управляемого устройства, на фиг. 2 приведен блок компьютерного управления, а на фиг. 3 представлена блок-схема комплекса. Заявляемый комплекс содержит дистанционно управляемое устройство (устройство привода) (фиг. 1), включающее, по меньшей мере, две видеокамеры широкого 1, узкого 2 поля обзора (зрения), как минимум, один дальномер 3 с устройством запоминания координат и дальности объекта-цели (на фигурах не показано) относительно устройства привода,тепловизор 4 и, по меньшей мере один датчик учета параметров стрельбы, выбранный из ряда (фиг. 3) термодатчик 5, датчик 6 атмосферного давления, датчик 7 направления и скорости ветра и датчик 8 выстрела, оружейную часть, имеющую единицу стрелкового или иного вида ствольного оружия 9 с магазином 10 для боеприпасов, сменную платформу 11 для установки оружия 9, снабженную устройством амортизации отката (на фигурах не показано), приводные устройства вертикального 12 и горизонтального 13 перемещения,спусковой механизм 14 оружия 9, блок 15 управления и сопряжения с каналом связи 16 через приемопередающее устройство 17 и блок компьютерного управления (фиг. 2 и 3),который имеет компьютер 18 с встроенными (на фигурах не показано) датчиком координат и скорости объекта-цели относительно устройства привода, датчиком движения за целью, датчиком признака цели, монитор 19, приемопередающее устройство 20 и устройство управления типа джойстик 21 либо графический манипулятор типа мышь или трекбол 22, или тот и другой одновременно. При этом компьютер 18 выполнен с возможностью программного запоминания изображения местности накадров, их сшивки, и слежения за объектом-целью. Все блоки устройства привода размещены на мобильном или стационарном каркасеосновании 23 (фиг. 1) для его перемещения и установки на боевой позиции. При этом устройство привода и блок компьютерного управления имеют автономный 24 или стационарный 25, или оба источника питания. Предлагаемый комплекс работает следующим образом. Предварительно дистанционно управляемое устройство устанавливают на боевую позицию посредством каркаса-основания 23, а оператор с блоком компьютерного управления располагается в укрытии на определенном расстоянии. Компьютер 18 каналом связи 16 через приемопередающие устройства 19 и 20 связан с аппаратурой устройства привода. После установки и подключения источников питания 24 и 25 комплекс готов к работе. Для управления используют компьютер 18 с монитором 19, к которому подключены клавиатура и устройство управления, например джойстик 21 либо трекбол или мышь 22. Обмен данных между электронными блоками устройства привода и компьютером осуществляется через блок 15 аппаратуры управления и сопряжения с каналом связи 17. Данные с устройства привода поступают по каналу связи 16 в компьютер 18. На экран монитора 19 выводят изображения с видеокамер 1 и 2. В компьютере 18 встроен датчик движения и слежения за целью, позволяющий осуществлять работу в автоматическом режиме. При появлении объекта-цели видеосигналы с видеокамер 1 и 2 или тепловизора 4 по каналу связи 16 через приемопередающие устройства 17 и 20 поступают на монитор 19, а компьютер 18 определяет координаты цели и подает сигнал оператору. На экране монитора 19 имеется прицельная метка, совмещенная с платформой 11 оружия 9. Компьютер 18 посредством приводных устройств 12 и 13 с учетом баллистики направляет оружие 9 на цель 4 49612008.12.30 и следует за ней. Оператор с помощью джойстика 21 и трекбола или мыши 22 наводит перекрестие прицельной метки на цель, после чего она может быть поражена или ее параметры (координаты и дальность) могут быть сохранены в памяти компьютера 18 до тех пор, пока оператор не подтвердит поражение цели. При подтверждении поражения подается сигнал по каналу связи 16 на спусковой механизм 14. При перемещении цели оружие направляют на нее с учетом скорости и направления движения. После сохранения параметров целей компьютер обрабатывает их и вносит поправки для стрельбы в зависимости от данных, полученных от термодатчика 5, датчика 6 атмосферного давления и датчика 7 направления и скорости ветра, которые используют для корректировки направления приводных устройств 12 и 13 перемещения оружия 9. В случае совпадения прицела оружия 9 с координатами, вычисленными в соответствии с нахождением цели, ее скоростью,направлением и баллистикой, срабатывает привод спускового механизма 14, происходит выстрел и срабатывает датчик 8 выстрела, а оружие 9 меняет направление движения в направлении на новую цель. Как правило, оператор выбирает заранее запрограммированный режим по целям (обстрел, сохранение целей), для чего в программе управления комплексом предусмотрен выбор целей из списка сохраненных, порядок прохода по выбранным (по номерам или координатам), проход по целям с выдачей запроса оператору на поражение цели. При этом стрельба может осуществляться с остановкой и без остановки устройства привода по сигналу датчика 8 выстрела с подсчетом боеприпасов в магазине 10 при стрельбе с остановкой, а при стрельбе без остановки скорость перемещения привода задают в зависимости от расположения и количества целей. При необходимости к блоку компьютерного управления через приемопередающее устройство 20 может быть подключено несколько устройств привода с индивидуальным или групповым их управлением, а также возможна работа комплекса в дежурном режиме с включенным датчиком движения. В этом случае при обнаружении движения на экране монитора 19 появится соответствующее сообщение. Экспериментально подтверждено, что предложенный комплекс в сравнении с прототипом обладает расширенной областью применения, большей скрытностью и мобильностью с улучшенными тактико-техническими характеристиками. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: F41H 11/00, F41A 23/00, F41G 5/00
Метки: огневого, поражения, автоматизированный, комплекс, управляемый, дистанционно
Код ссылки
<a href="https://by.patents.su/6-u4961-avtomatizirovannyjj-distancionno-upravlyaemyjj-kompleks-ognevogo-porazheniya.html" rel="bookmark" title="База патентов Беларуси">Автоматизированный дистанционно управляемый комплекс огневого поражения</a>
Дистанционно управляемый кинооператорский кран
Номер патента: 301
Опубликовано: 30.12.1994
Автор: Кокуш А. А.
МПК: G03B 17/00, B66C 23/72
Метки: управляемый, кинооператорский, дистанционно, кран
Текст:
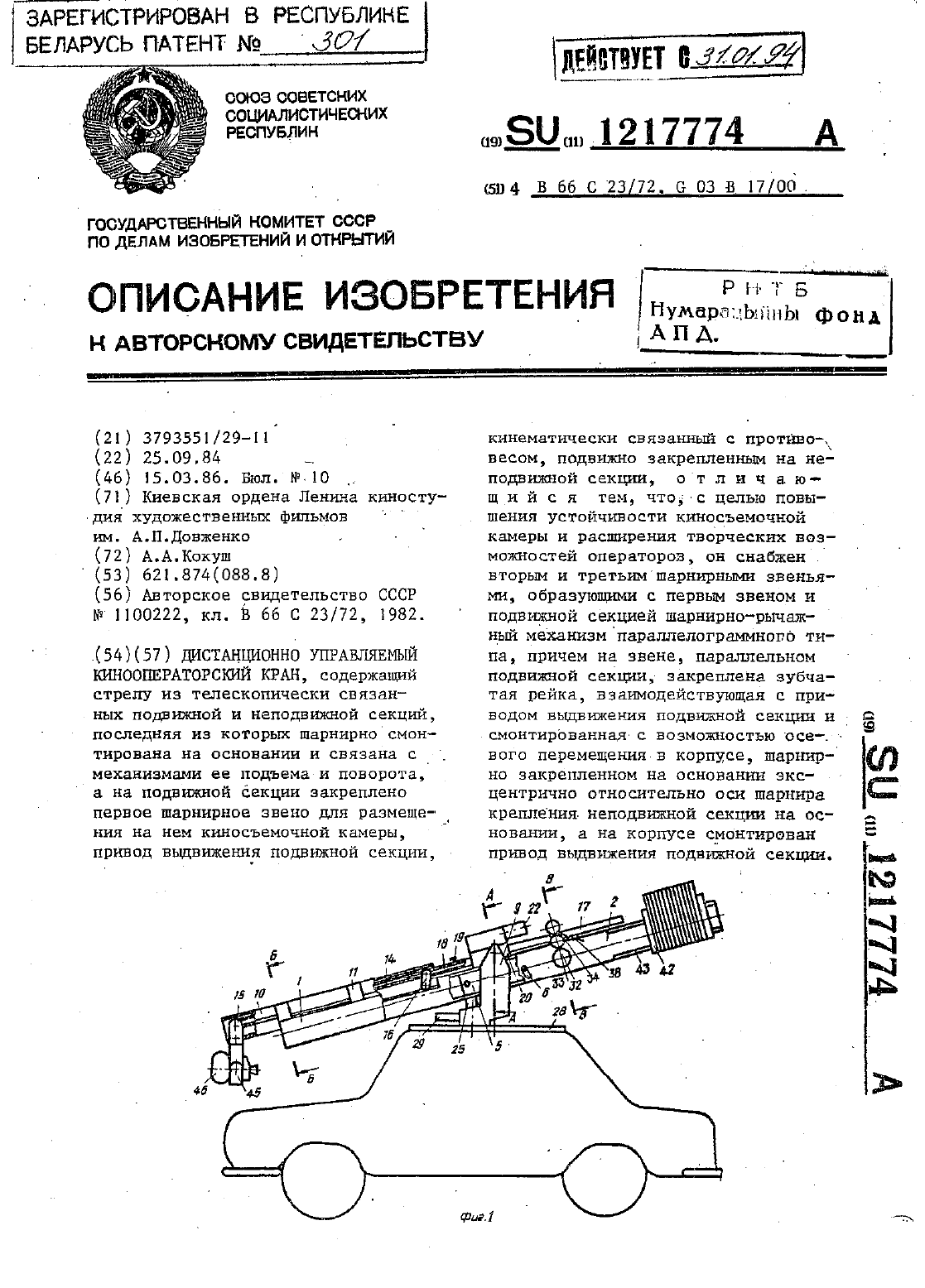
...с ними И секцией параллелограмм (фиг. 11. Продолжением звена 14 является зубчатая 35 рейа 17, связанная со звеном 14 муфтой 18 И зажимом 19 Рейка 17 свободно установлена в корпусе 20 который установлен в подшпниках 21 на основании 9, так что межцент даРОВОЕ РЗССТОЯННЕ осей на ОСНОВЗННИравно расстояни между осями шарниров на каждом из звеньев 15 и 16. Привод 22 выдвижения подвижной секции закреплен на корпусе 20 с по- д 5 мощью зажимов 23 так,...
Автоматизированный заливочно-смесительный комплекс (варианты)
Номер патента: U 2499
Опубликовано: 28.02.2006
Авторы: Ревяков Денис Евгеньевич, Коваленок Денис Владимирович, Ксенофонтов Михаил Александрович, Кердоль Геннадий Игнатьевич, Выдумчик Сергей Васильевич, Козел Сергей Аркадьевич, Хатенко Александр Сергеевич
МПК: B29C 67/20
Метки: варианты, автоматизированный, заливочно-смесительный, комплекс
Текст:
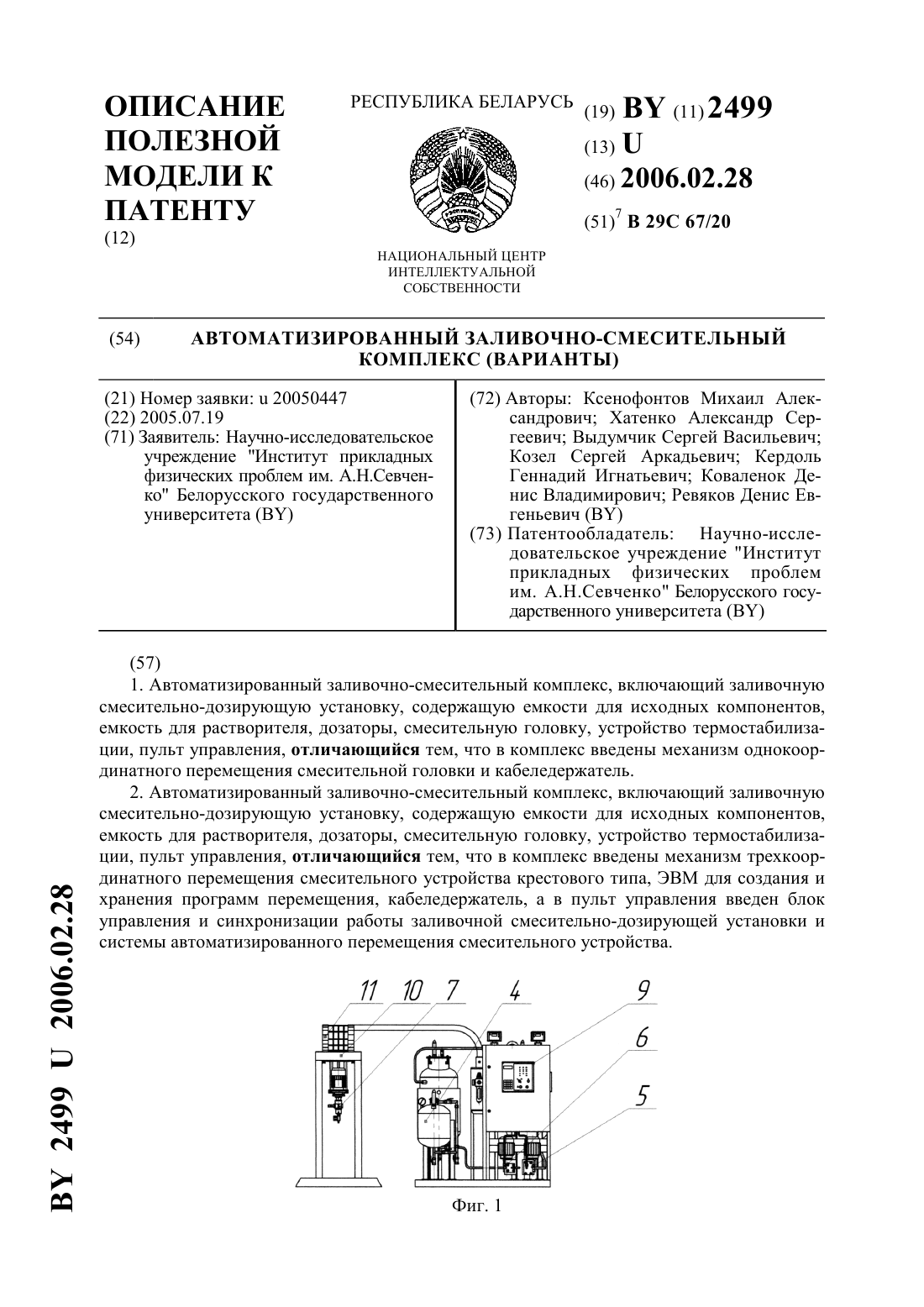
...работы установки и системы автоматизированного перемещения смесительного устройства. 2 24992006.02.28 В третьем варианте поставленная задача достигается тем, что в автоматизированный заливочно-смесительный комплекс, включающий заливочную смесительно-дозирующую установку, содержащую емкости для исходных компонентов, емкость для растворителя,дозаторы, смесительную головку, устройство термостабилизации, пульт управления, по предлагаемому...
Комплекс гравиметрический
Номер патента: U 4643
Опубликовано: 30.08.2008
Авторы: Ключиц Александр Сергеевич, Скакун Сергей Степанович
МПК: B01F 15/04
Метки: комплекс, гравиметрический
Текст:
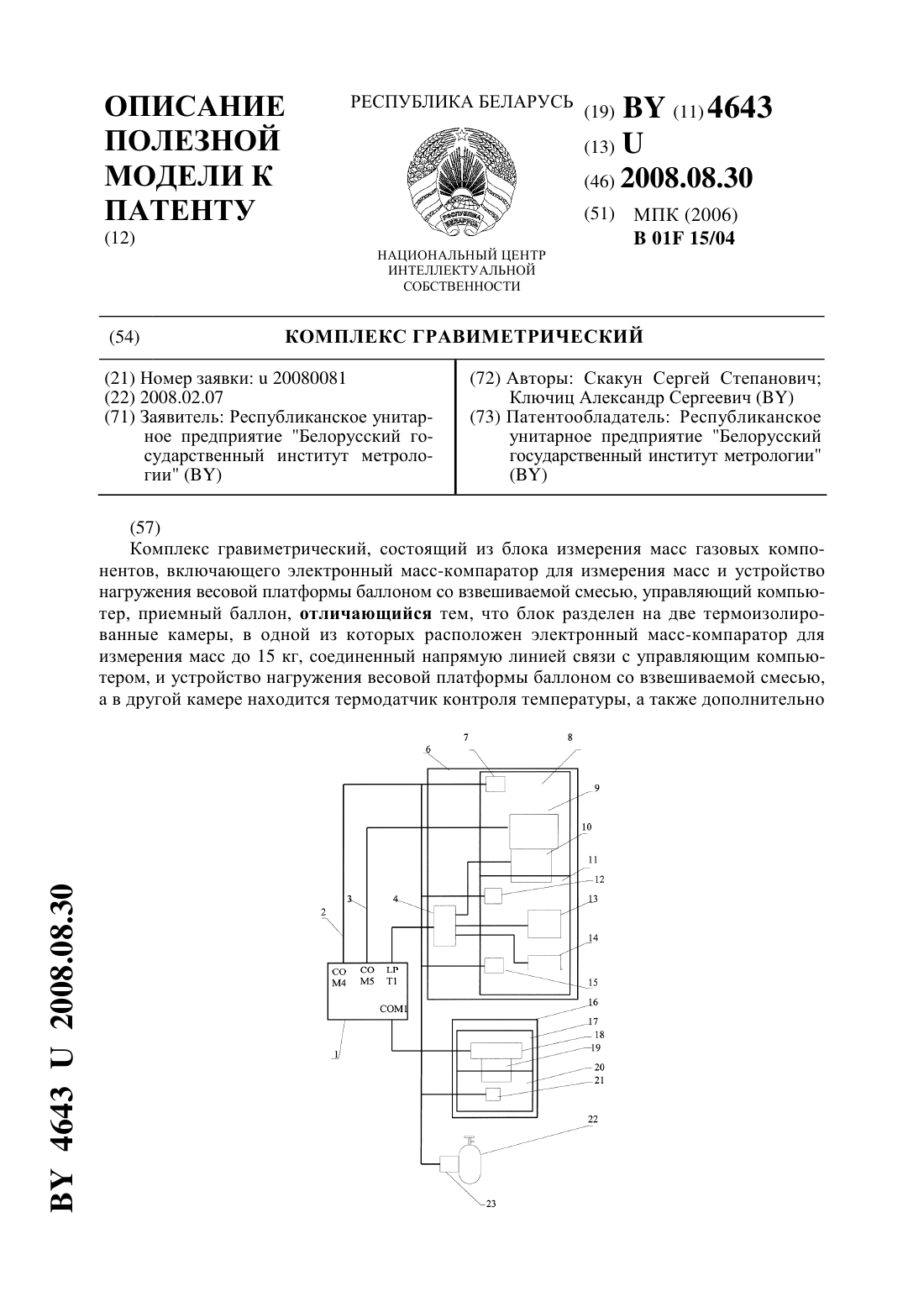
...для измерения масс и устройство нагружения весовой платформы баллоном со взвешиваемой смесью, управляющий компьютер, приемный баллон, согласно полезной модели, блок разделен на две термоизолированные камеры, в одной из которых расположен электронный масс-компаратор для измерения масс до 15 кг, соединенный напрямую линией связи с управляющим компьютером, и устройство нагружения весовой платформы баллоном со 2 46432008.08.30 взвешиваемой...
Автоматизированный дискретный дозатор комбикормов
Номер патента: U 787
Опубликовано: 30.03.2003
Авторы: Гируцкий Иван Иванович, Павловский Владимир Александрович
МПК: A01K 5/02
Метки: комбикормов, дозатор, дискретный, автоматизированный
Текст:
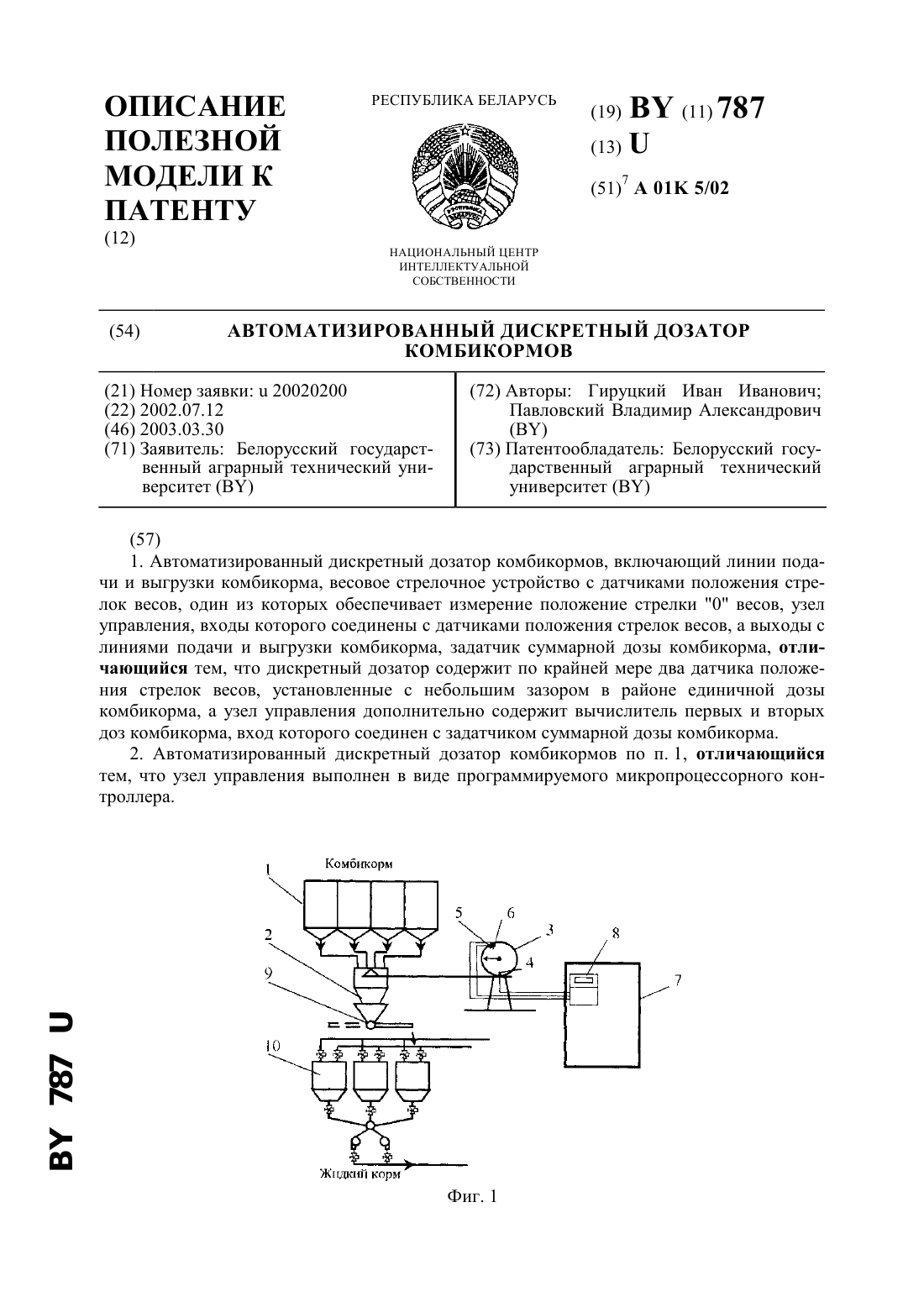
...входы которого соединены с датчиками положения стрелок весов, а выходы с линиями подачи и выгрузки комбикорма, задатчик суммарной дозы комбикорма, причем дискретный дозатор содер 787 жит по крайней мере два датчика положения стрелок весов, установленные с небольшим зазором в районе единичной дозы комбикорма, а узел управления дополнительно содержит вычислитель первых и вторых доз комбикорма, вход которого соединен с задатчиком суммарной дозы...
Автоматизированный водонагреватель
Номер патента: U 2466
Опубликовано: 28.02.2006
Авторы: Северянин Виталий Степанович, Тимошук Александр Леонидович
МПК: F24H 1/00, F22B 31/00
Метки: водонагреватель, автоматизированный
Текст:
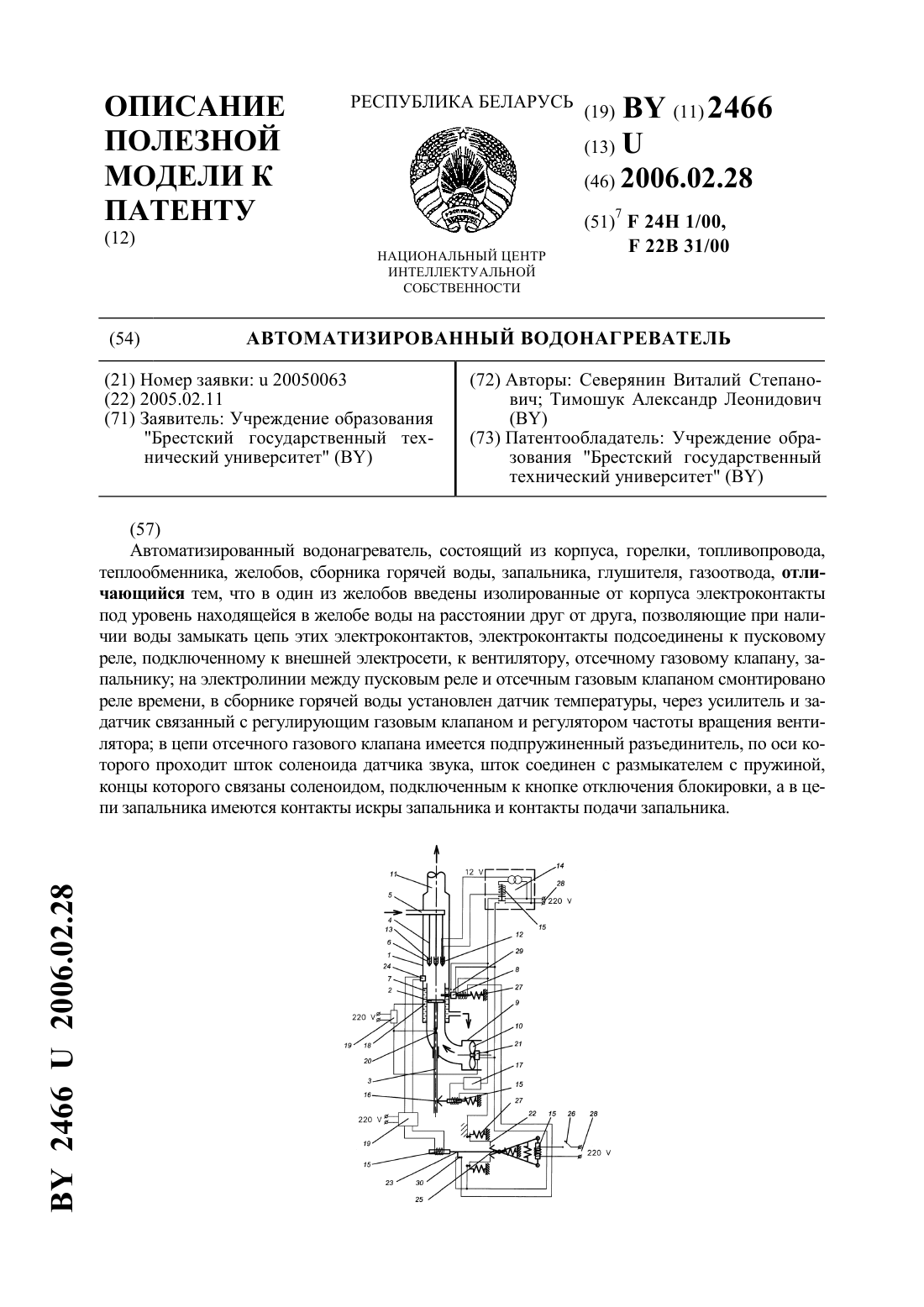
...корпус - 1, горелка - 2, топливопровод - 3, теплообменник - 4, коллектор - 5, желоба - 6,сборник горячей воды - 7, запальник - 8, глушитель - 9, вентилятор - 10, газоотвод - 11,электроконтакты - 12, уровень находящейся в желобе воды - 13, пусковое реле - 14, соленоиды - 15, отсечной газовый клапан - 16, реле времени - 17, датчик температуры - 18,усилитель и задатчик - 19, регулирующий газовый клапан - 20, регулятор частоты вращения...
Предыдущий патент: Светосильный объектив
Следующий патент: Устройство централизованной смазки металлорежущего оборудования
Случайный патент: Туковысевающий аппарат