Способ определения направления на источник излучения электромагнитных волн и устройство для его осуществления
Текст
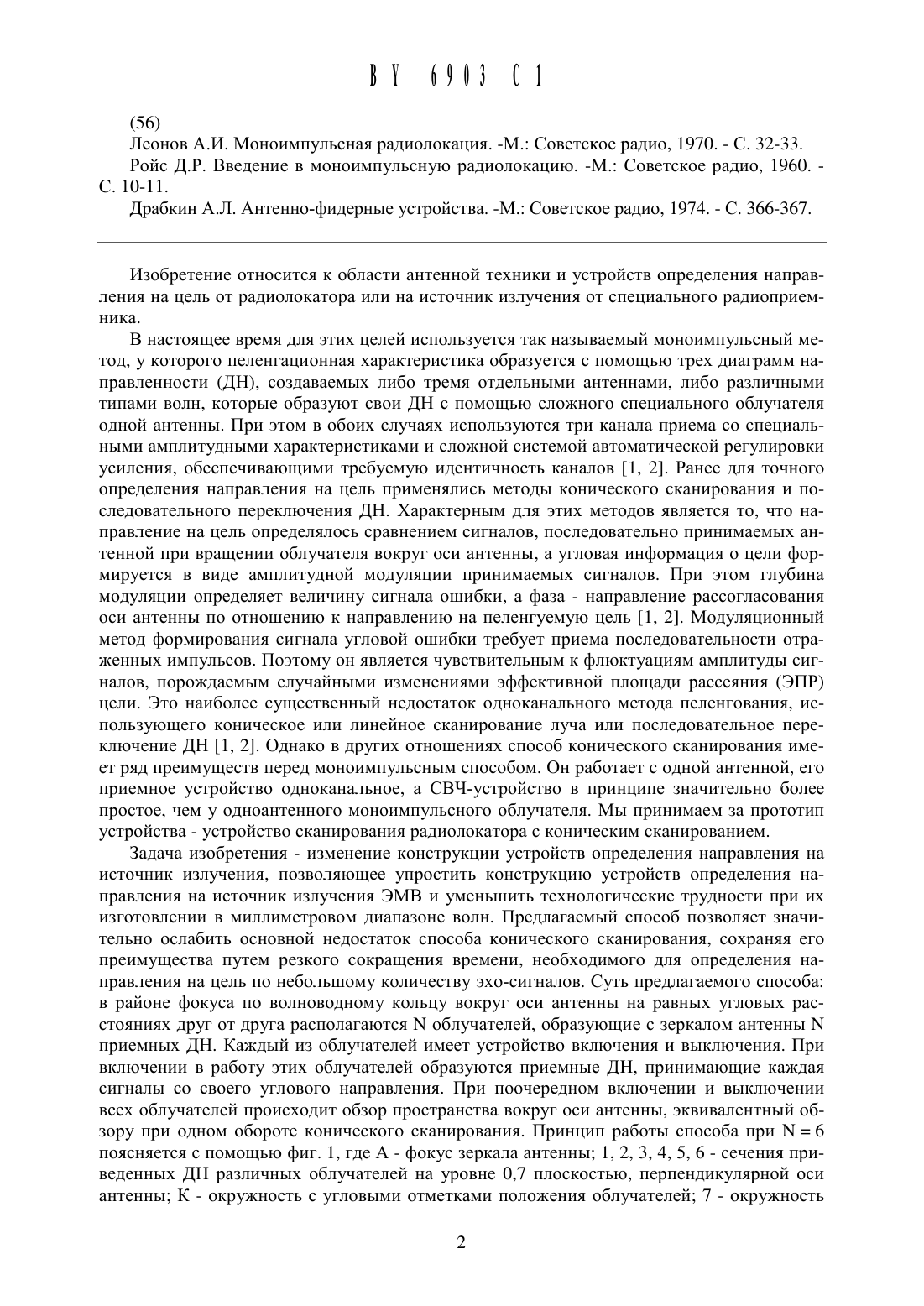
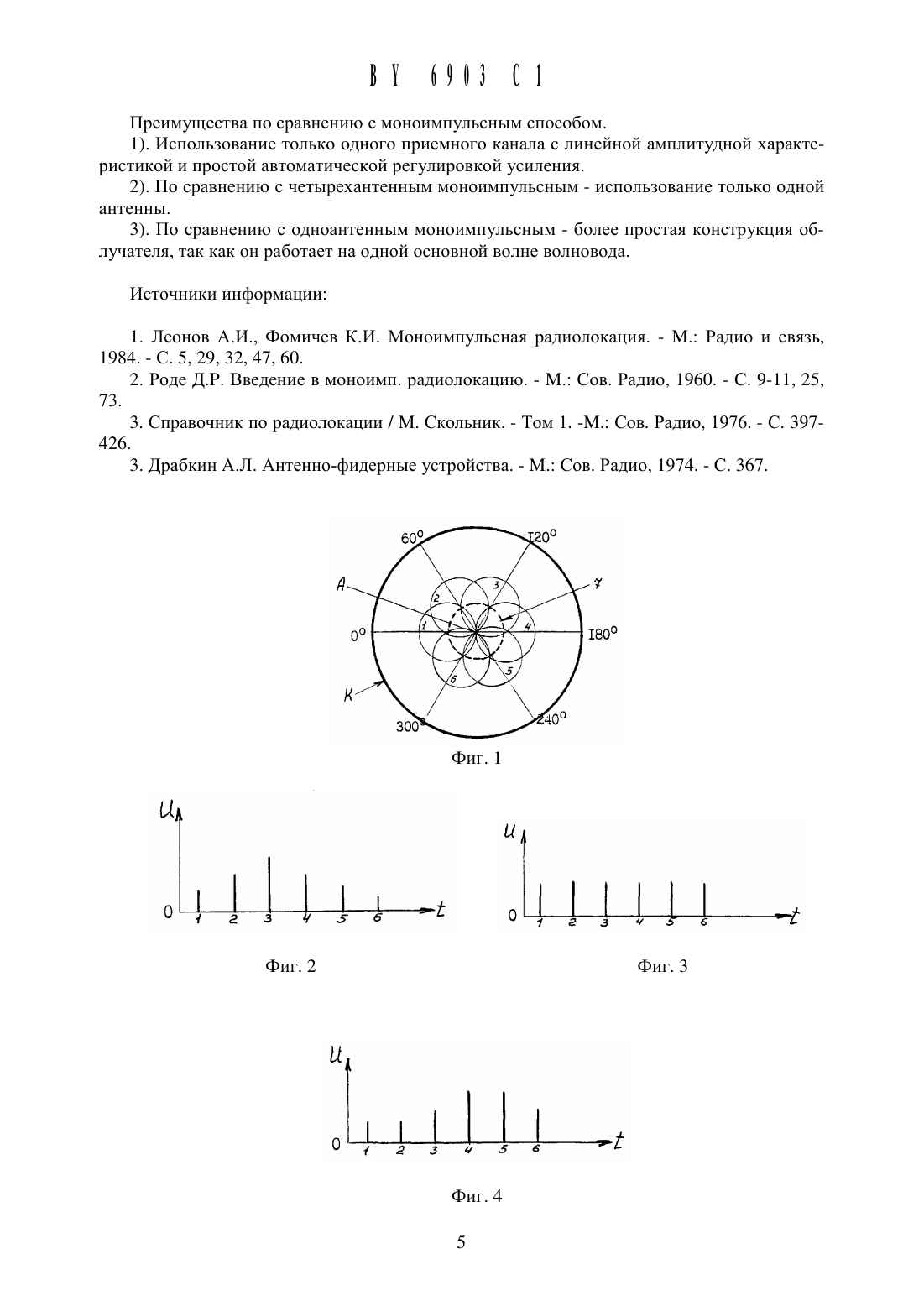
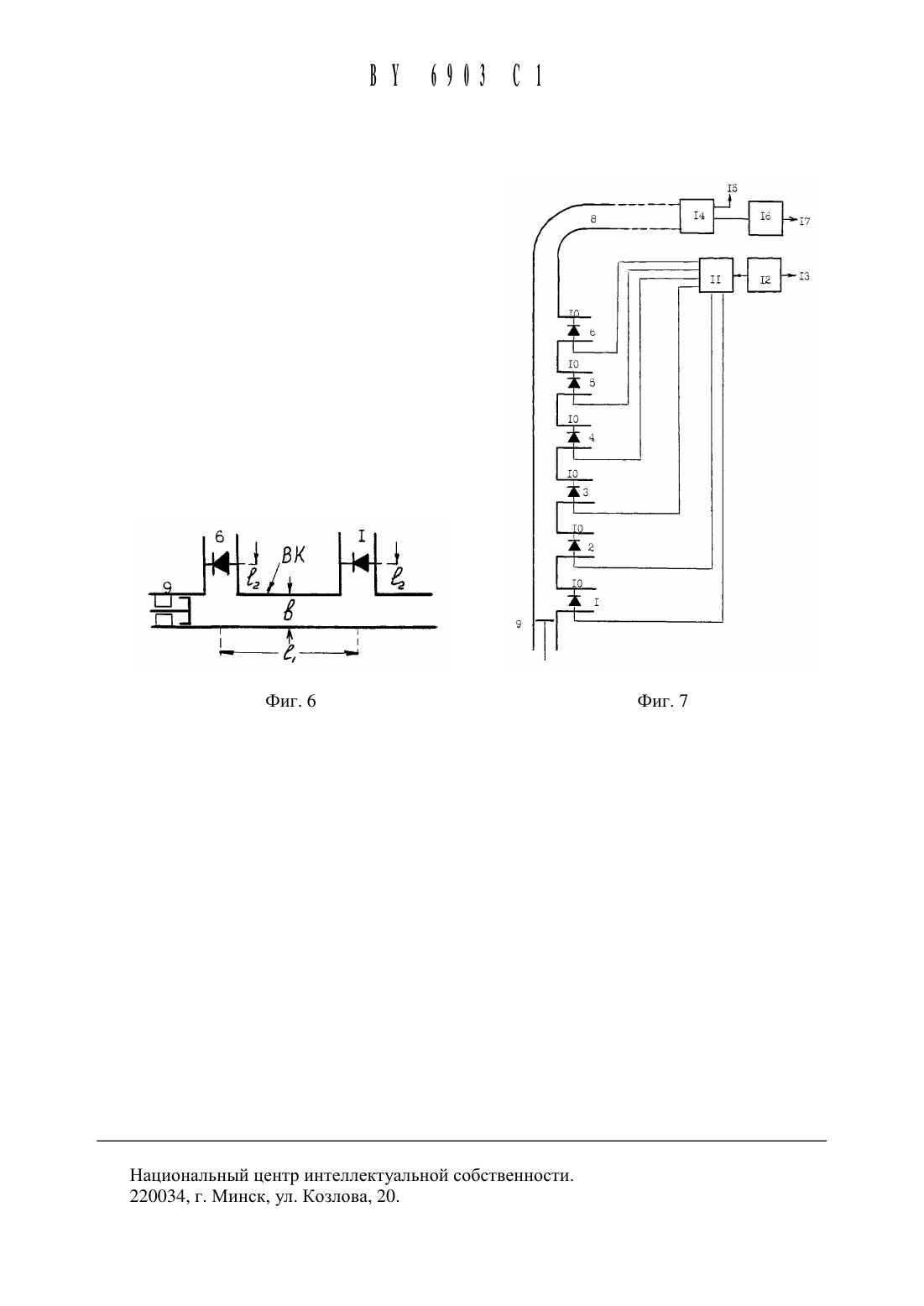
Изобретение относится К области антенной техники и устройств определения направления на цель от радиолокатора или на источник излучения от специального радиоприемника.В настоящее время для этих целей используется так называемый моноимпульснь 1 й метод, у которого пеленгационная характеристика образуется с помощью трех диаграмм направленности (ДН), создаваемых либо тремя отдельными антеннами, либо различными типами волн, которые образуют свои ДН с помощью сложного специального облучателя одной антенны. При этом в обоих случаях используются три канала приема со специальными амплитудными характеристиками и сложной системой автоматической регулировки усиления, обеспечивающими требуемую идентичность каналов 1, 2. Ранее для точного определения направления на цель применялись методы конического сканирования и последовательного переключения ДН. Характерным для этих методов является то, что направление на цель определялось сравнением сигналов, последовательно принимаемых антенной при вращении облучателя вокруг оси антенны, а угловая информация о цели формируется в виде амплитудной модуляции принимаемых сигналов. При этом глубина модуляции определяет величину сигнала ощибки, а фаза - направление рассогласования оси антенны по отношению к направлению на пеленгуемую цель 1, 2. Модуляционный метод формирования сигнала угловой ощибки требует приема последовательности отраженных импульсов. Поэтому он является чувствительным к флюктуациям амплитуды сигналов, порождаемым случайными изменениями эффективной площади рассеяния (ЭПР) цели. Это наиболее существенный недостаток одноканального метода пеленгования, использующего коническое или линейное сканирование луча или последовательное переключение ДН 1, 2. Однако в других отнощениях способ конического сканирования имеет ряд преимуществ перед моноимпульсным способом. Он работает с одной антенной, его приемное устройство одноканальное, а СВЧ-устройство в принципе значительно более простое, чем у одноантенного моноимпульсного облучателя. Мы принимаем за прототип устройства - устройство сканирования радиолокатора с коническим сканированием.Задача изобретения - изменение конструкции устройств определения направления на источник излучения, позволяющее упростить конструкцию устройств определения направления на источник излучения ЭМВ и уменьщить технологические трудности при их изготовлении в миллиметровом диапазоне волн. Предлагаемый способ позволяет значительно ослабить основной недостаток способа конического сканирования, сохраняя его преимущества путем резкого сокращения времени, необходимого для определения направления на цель по небольщому количеству эхо-сигналов. Суть предлагаемого способа в районе фокуса по волноводному кольцу вокруг оси антенны на равных угловых расстояниях друг от друга располагаются Ы облучателей, образующие с зеркалом антенны Ы приемных ДН. Каждый из облучателей имеет устройство включения и выключения. При включении в работу этих облучателей образуются приемные ДН, принимающие каждая сигналы со своего углового направления. При поочередном включении и выключении всех облучателей происходит обзор пространства вокруг оси антенны, эквивалентный обзору при одном обороте конического сканирования. Принцип работы способа при Ы 6 поясняется с помощью фиг. 1, где А - фокус зеркала антенны 1, 2, 3, 4, 5, 6 - сечения приведенных ДН различных облучателей на уровне 0,7 плоскостью, перпендикулярной оси антенны К - окружность с угловыми отметками положения облучателей 7 - окружностьотклонений осей приемных ДН на угол ос. Оси приемных ДН отклонены от оси антенны на угол ос, величина которого обычно выбирается такой, чтобы пересечение приведенных ДН происходило на уровне 0,7. При этом угол ос оказывается равным половине Ширины ДН антенны. При последовательном поочередном включении облучателей направление на источник электромагнитных волн определяется по величине сигналов, принятых щестью приемными ДН Р 1(Э 1) 13102) 133(03) 13404) Р 5(Э 5) 13406). Углы 0 соответствуют отклонению направления прихода сигнала от оси каждой приемной ДН.фиг. 1. Принцип работы способа при Ы 6фиг. 5. Устройство, реализующее способ определения направления на цельфиг. 6. Сечение волноводного кольца по линии М-Мфиг. 7. Общая схема устройства, поясняющая последовательность действия отдельных его элементов.В радиолокаторе включение облучателя производится после окончания посылки зондирующего импульса, а выключение - перед посылкой следующего импульса. Благодаря стробированию на выходе приемника получаем эхо-сигнал от выбранной цели. Таким образом, за одно поочередное включение щести облучателей получаем на выходе приемника щесть эхо-сигналов от выбранной цели, каждый из которых принят ДН, занимающей жесткое угловое положение на кольце. На фиг. 2, 3, 4 показаны примерные последовательности сигналов, составляющих функцию щести сигналов, по которой ЭВМ определяет направление на цель. Серия сигналов фиг. 2 соответствует приходу сигналов с направления 120 серия сигналов фиг. 3 соответствует приходу сигналов с осевого направления серия сигналов фиг. 3 соответствует приходу сигналов с направления 210. Величину угловой ощибки ЭВМ определяет по отнощению максимума функции щести сигналов к минимуму, а угловое направление - по угловому положению максимума и минимума относительно кольца. Заметим использование ЭВМ позволяет обойтись без стробирования в радиоприемнике, так как она сама может разделять сигналы, приходящие с различных дальностей и получать столько функций щести сигналов, сколько целей с разными дальностями находится в луче антенны радиолокатора и по ним определять направления на эти цели.Оценка влияния эффекта изменения ЭПР целей на предлагаемый способ определения направления на цель. Как известно, при коническом сканировании для определения направления требуется длительная последовательность импульсов. Например, при частоте сканирования 30 Герц и частоте повторения импульсов 1500 Гц за пять периодов сканирования получаем необходимую серию в количестве 250 импульсов длительностью в 0,166 с 2. Предлагаемый способ определяет направление на цель по щести импульсам, что соответствует длительности в 4 миллисекунды. Так как, согласно 3, флюктуации эхосигналов от целей за счет изменения ЭПР имеют спектр в пределах от нуля до 11 Гц, то их влияние на точность измерения направления квазимоноимпульсным способом будет незначительным - в 40 раз меньщим чем при коническом способе и примерно таким же, как и при моноимпульсном способе.Устройство, реализующее квазимоноимпульсный способ определения направления,выполненное на прямоугольном волноводе, показано на фиг. 5 и 6. На фиг. 5 ВК - волноводное кольцо а - размер щирокой стенки волновода К - радиус волноводного кольца 1,2, 3, 4, 5, 6 - смещенные по кольцу на 60 друг от друга и соединенные с ВК открытые концы волноводов, являющиеся облучателями, образующими с зеркалом щесть приемных ДН 7 - расположенный в фокусе антенны открытый конец волновода - облучатель зондирующего сигнала 8 - выход энергии СВЧ принятых эхо-сигналов 9 - подстроечный порщень, обеспечивающий передачу принятых облучателями эхо-сигналов к выходу ВК 1 расстояние между открытыми концами волноводов. На фиг. 6 показано сечение волно В 16903 С 1водного кольца по линии МЫ ВК - волноводное кольцо В - размер узкой стенки волновода 16 - открытые КОНЦЬ 1 волноводов 10 - р-й-п диоды 9 - подстроечнь 1 й поршень 11 - расстояние между соседними отводами волноводов, равное целому числу длин волн в волноводе 12 - расстояние до р-й-п диода от кольца. Расстояние 11 определяется по формуле 11 ПАВ, где п - целое числоРасстояние 12 выбирается равным четверти длины волны в волноводе. Радиус волноводного кольца выбирается из условия пересечения приведенных приемных ДН, образованных противоположно расположенными облучателями на уровне 0,7. Согласно 4, он рассчитывается по формулеПринцип действия устройства объясняется с помощью общей схемы, показанной на фиг. 7, где 1, 2, 3, 4, 5, 6 - открытые концы волноводов 8 - выход эхо-сигналов к приемнику 9 - поршень подстройки 10 - р-й-п диоды, производящие включение и выключение облучателей 11 - коммутатор 12 - генератор импульсов запуска 13 - к модулятору передатчика 14 - радиоприемное устройство 15 - к обнаружителю эхо-сигналов и измерителю дальности 16 - аналог-цифра преобразователь и ЭВМ 17 - угловое отклонение направления на цель от оси антенны в цифровой форме. Последовательность работы элементов схемы. Считаем, что настроечный поршень установлен правильно, коммутатор закрыл все ответвления от волноводного кольца, а приемник стробирует эхо-сигнал от выбранной цели. Генератор импульсов запуска посылает первый импульс к модулятору передатчика и с задержкой на время длительности импульса к коммутатору и ЭВМ. Радиолокатор излучает зондирующий сигнал, после чего коммутатор включает на прием первый облучатель. Принятый этим облучателем эхо-сигнал поступает в приемник и после преобразований в нем поступает на аналог цифра преобразователь и ЭВМ. В конце периода повторения первый облучатель закрывается. При посылке следующего зондирующего сигнала происходят те же процессы со вторым облучателем. Таким образом, после посылки Шести зондирующих сигналов ЭВМ образует функцию Шести сигналов, по которой определяет угловое направление на цель. Заметим, что выходные волноводы от второго, третьего, пятого и Шестого облучателей скручены на 6 О, чтобы обеспечить совпадение поляризаций с облучателем передатчика. После приема Шестого эхо-сигнала схема начинает работать по той же последовательности, образуя следующую функцию Шести сигналов. Таким образом, после посылки каждых Шести зондирующих сигналов на выходе ЭВМ получаются результаты расчета углового положения цели. Преимущества перед облучателями конического сканирования1). Информация об угловом положении цели получается от каждых Шести импульсов.2). Не нужен переключатель прием-передача, так как передача и прием производятся разными облучателями и, кроме того, приемное устройство защищено от проникновения зондирующего сигнала р-й-п диодами, вносящими в закрытом состоянии 60 децибел потерь.3). Не нужна система сельсинов, следящих за текущим положением вращающегося облучателя.4). Позволяет разделить передающую и приемные ДН, благодаря чему облучатель передатчика располагается все время в фокусе зеркала антенны, что позволяет путем создания соответствующего поля на раскрыве зеркала получить малый уровень боковых лепестков.Преимущества по сравнению с моноимпульснь 1 м способом.1). Использование только одного приемного канала с линейной амплитудной характеристикой и простой автоматической регулировкой усиления.2). По сравнению с четь 1 рехантеннь 1 м моноимпульснь 1 м - использование только одной антеннь 1.ПО сравнению С одноантеннь 1 м МОНОИМПУЛЬСНЫМ - ООЛСВ простая КОНСТРУКЦИЯ ОбЛУЧЗТСЛЯ, так как ОН работает на ОДНОЙ ОСНОВНОЙ ВОЛНС волновода.3. Справочник по радиолокации / М. Скольник. - Том 1. -М. Сов. Радио, 1976. - С. 397426
МПК / Метки
МПК: H01Q 25/00
Метки: волн, способ, осуществления, электромагнитных, излучения, источник, устройство, направления, определения
Код ссылки
<a href="https://by.patents.su/6-6903-sposob-opredeleniya-napravleniya-na-istochnik-izlucheniya-elektromagnitnyh-voln-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Беларуси">Способ определения направления на источник излучения электромагнитных волн и устройство для его осуществления</a>
Способ определения дальности объекта и устройство для его осуществления
Номер патента: 4739
Опубликовано: 30.12.2002
Автор: Коростик Константин Николаевич
МПК: G01S 17/10, G01C 3/08
Метки: устройство, осуществления, способ, дальности, определения, объекта
Текст:
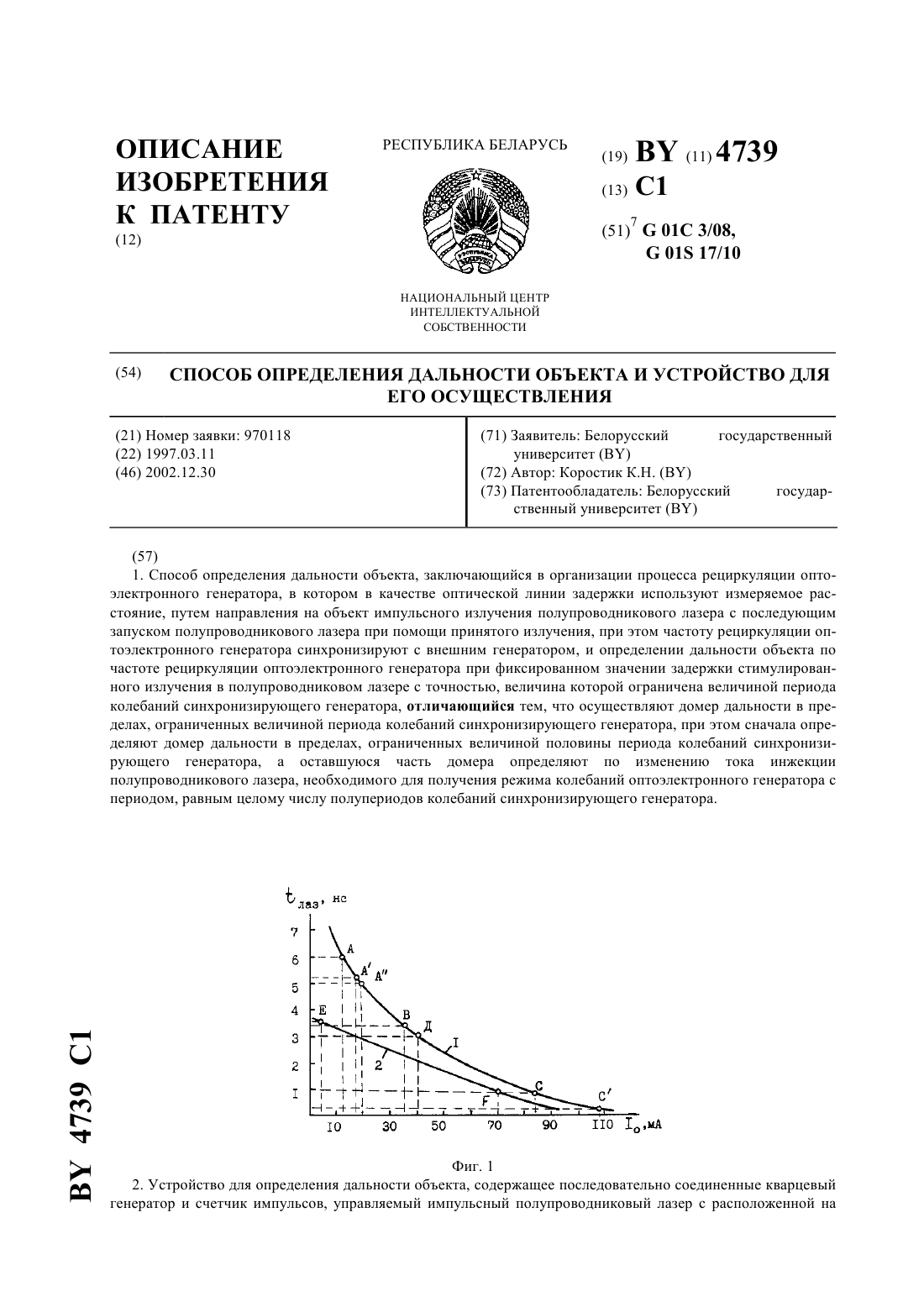
...Ткг), согласно кривой 1, для реализации заявляемого способа потребуется изменение тока постоянного смещения лазера 025 мА (см. точки А и В). При этом превышениетока накачки лазера над пороговым значением изменяется от(1,1 ст) /ст 1,2 лишь до(1,1 ст) /ст 1,4. В спосоп п п п бе-прототипе 072 мА (см. точки А и С), а значениев точке С достигает значения 1,9. При этом следует иметь в виду, что в начальной точке А 1,2 выбрано значительно ниже...
Способ определения направления скважины во время ее бурения (варианты)
Номер патента: 4716
Опубликовано: 30.09.2002
Автор: НИХОЛСОН Джеймс Виллиам
МПК: E21B 47/022
Метки: бурения, определения, варианты, направления, способ, скважины, время
Текст:
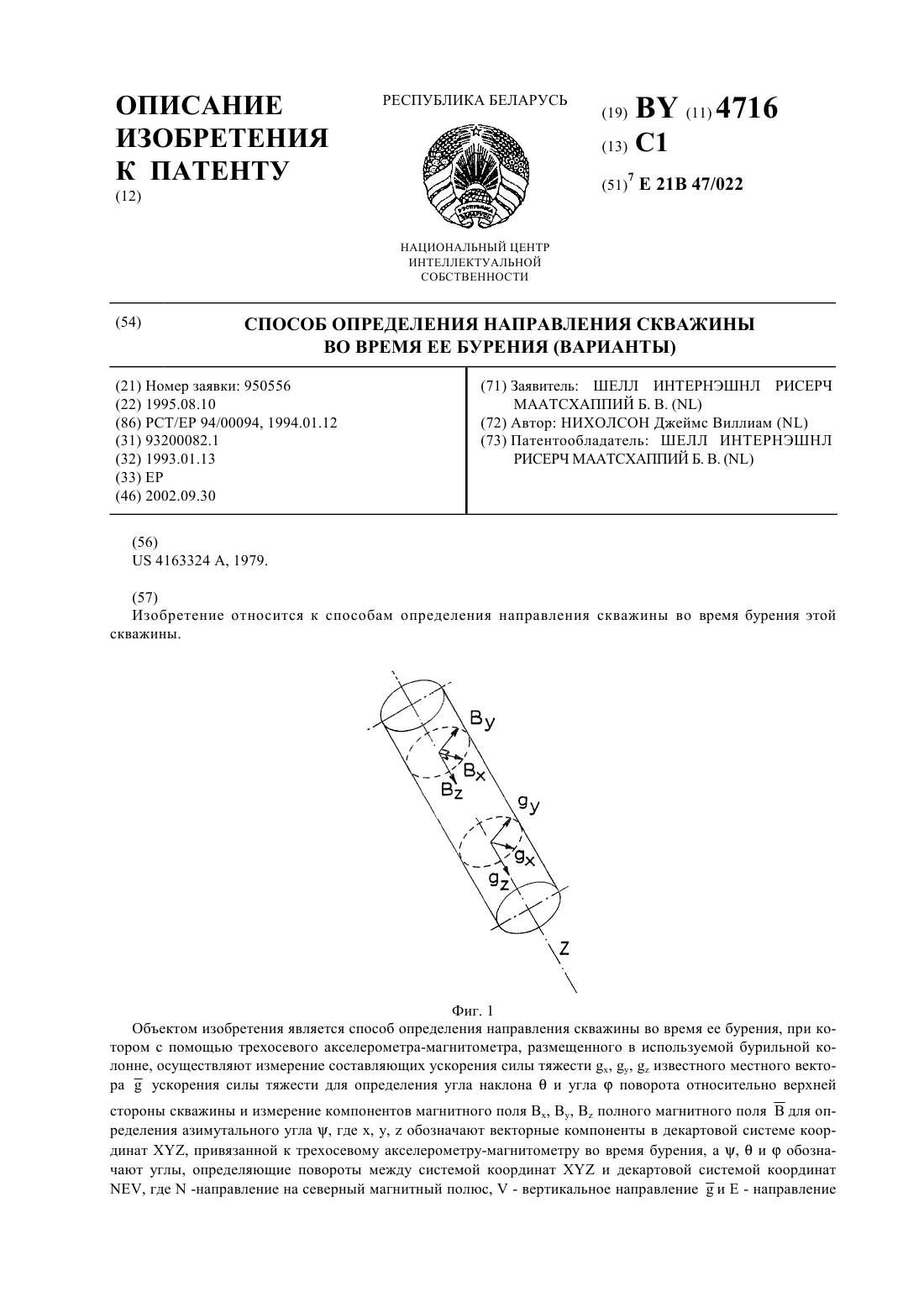
...вдоль оси скважины. На фиг. 3 (которую можно найти, например, в патенте США 4 163 324) показаны обе системыи, относительно схематично представленной скважиныи относительно друг друга. Как показано на фигуре, последовательность из трех поворотов связывает вектора в каждой из систем, т.е. через азимутальный угол , угол наклона , угол поворотаотносительно верхней стороны, так называемые углы Эйлера, которые хорошо известны специалистам в этой...
Способ направления воздуха для провеивания крупок и круповейка для его осуществления
Номер патента: 1927
Опубликовано: 30.12.1997
Автор: МЮЛЛЕР РОМАН
МПК: B07B 4/08
Метки: воздуха, круповейка, крупок, осуществления, направления, провеивания, способ
Текст:
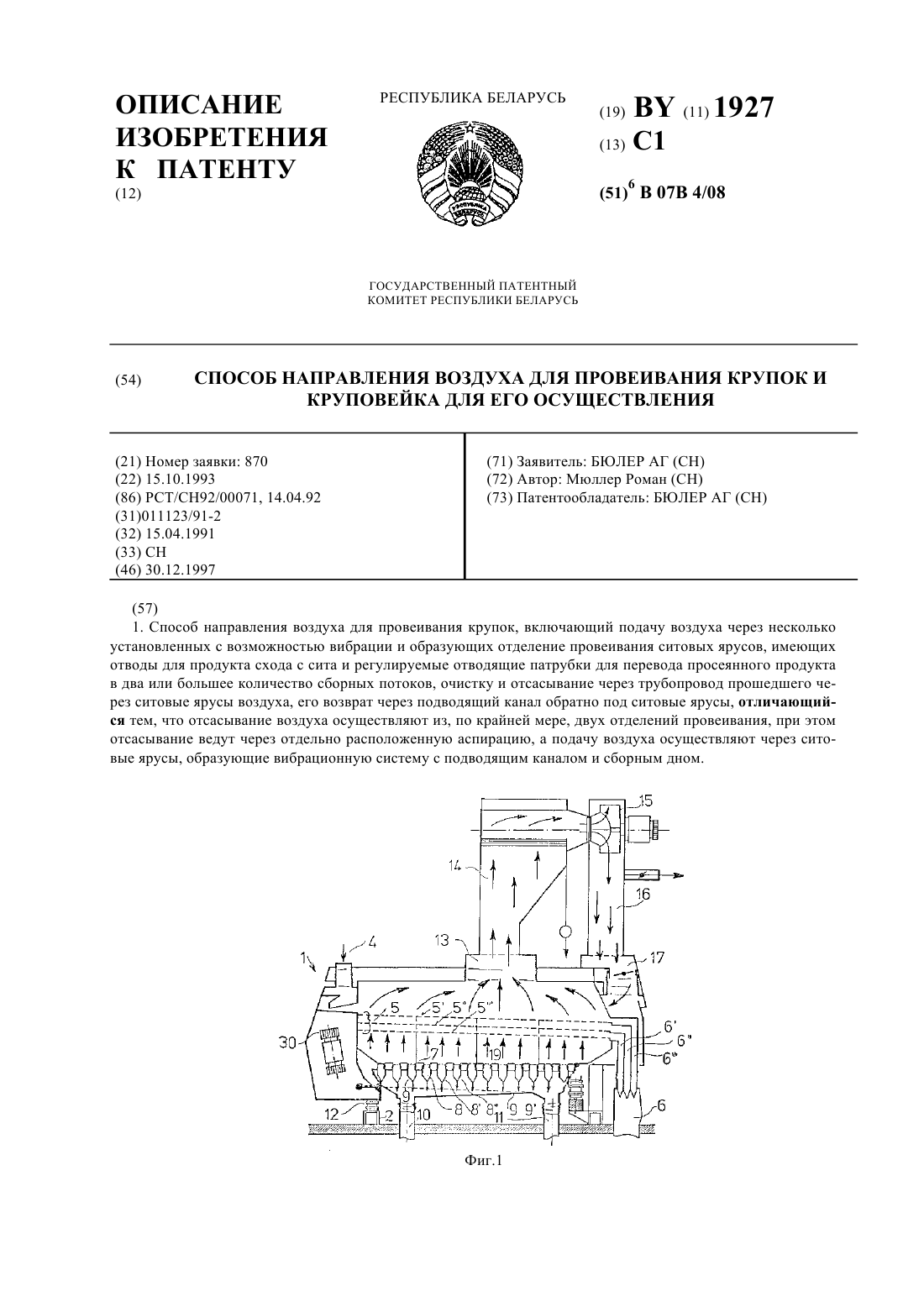
...для подвода воздуха закрытую наружу камеру для просеянного продукта, под которой расположены регулируемые рабочие патрубки для перевода просеянного продукта в два или большее количество сборных лотков, ситовые ярусы с каналом для подвода воздуха и сборным дном соединены в вибрационную систему. Причем приспособление для подвода воздуха в канал для подвода воздуха расположено в верхней части на концевой стороне круповейки напротив...
Способ получения изображения внутренней структуры объекта с использованием рентгеновского излучения и устройство для его осуществления
Номер патента: 6725
Опубликовано: 30.12.2004
Авторы: КУМАХОВ, Мурадин Абубекирович
МПК: G01N 23/223
Метки: рентгеновского, получения, внутренней, способ, осуществления, использованием, изображения, излучения, структуры, объекта, устройство
Текст:
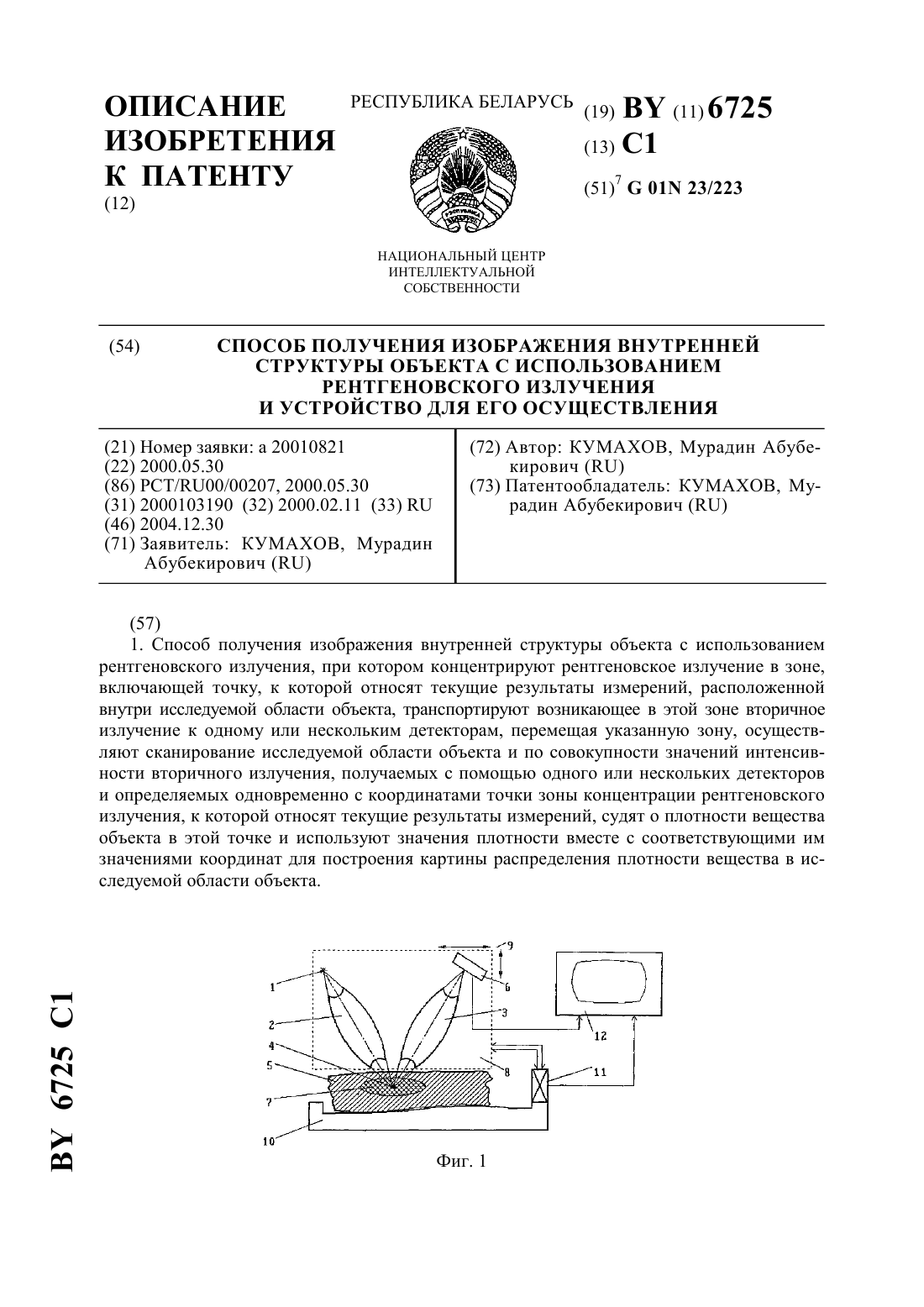
...для обработки и отображения информации, датчики для определения координат точки, к которой относят текущие результаты измерений, расположенной внутри исследуемой области объекта, связанные со средством позиционирования исследуемого объекта и рентгенооптической системой, подключенные своими выходами к средству для обработки и отображения информации, при этом рентгенооптическая система содержит один или несколько рентгеновских...
Способ фотометрического определения дефектов и устройство для его осуществления
Номер патента: 1093
Опубликовано: 14.03.1996
Авторы: Костюткин Владимир Григорьевич, Татарченко Раиса Александровна, Казаков Николай Павлович, Крылов Юрий Николаевич, Соколов Евгений Александрович
МПК: G01N 21/55
Метки: дефектов, способ, определения, фотометрического, осуществления, устройство
Текст:
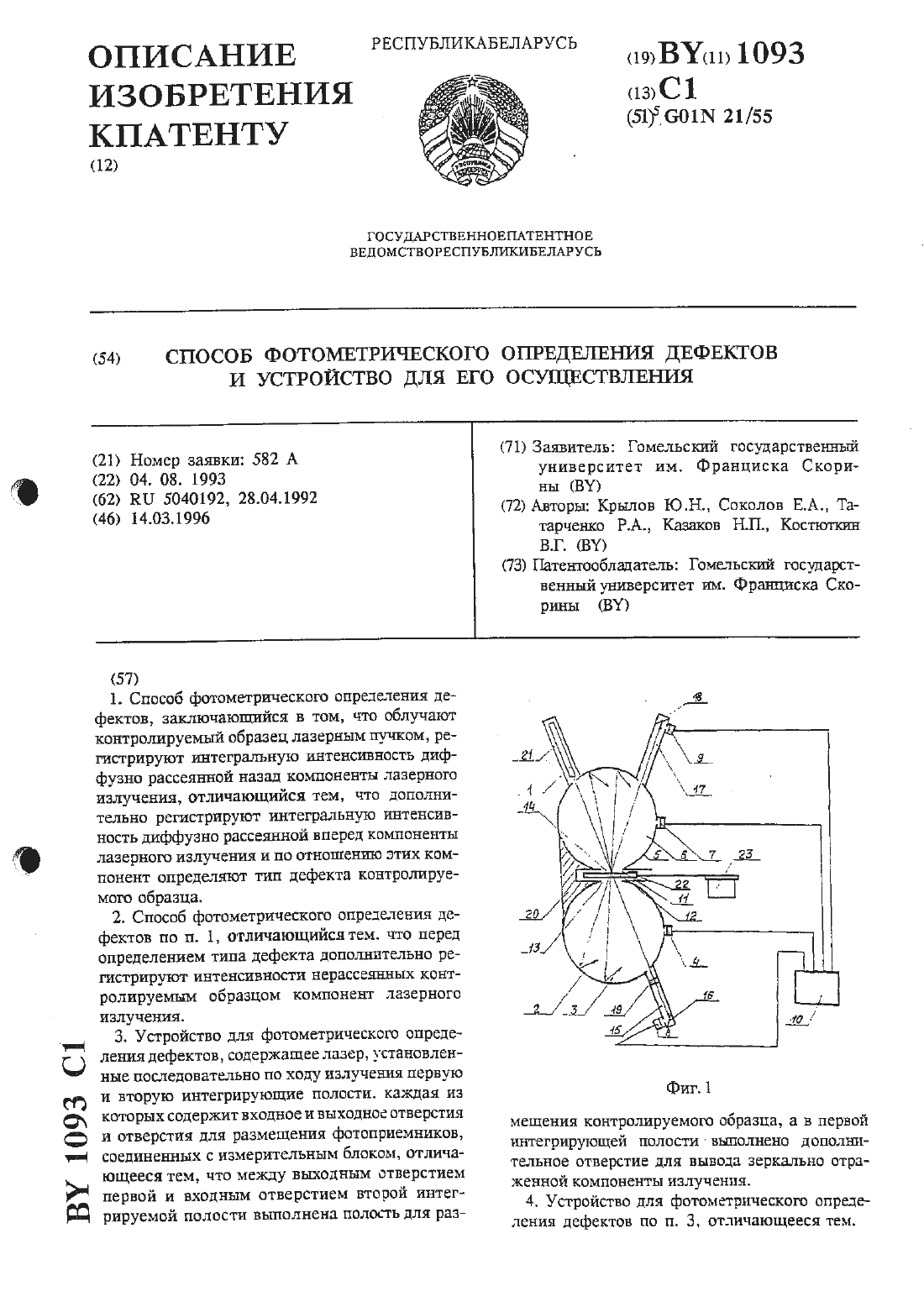
...4, фотометрический узел 5, образованный интегрирующей полостью 6 и фотоприемником 7, дополнительные фотоприемтшки 8, 9, измерительный блок 10,полость 11 для размещения контролируемого образца 12.Интегрирующие полости 6 и 3 последовательно установлены по ходу лазерного излучения. Каждая из них имеет входное и выходное отверстия, отверстие для размещения фотоприемника, а интегрирующая полость 6 дополнительное отверстие для вывода зеркально...
Предыдущий патент: Способ повышения радиорезистентности организма млекопитающего в эксперименте
Следующий патент: Способ синтеза стабильных электрических колебаний некратных частот
Случайный патент: Распределительно-присоединительный модуль