Способ определения дальности объекта и устройство для его осуществления

Текст
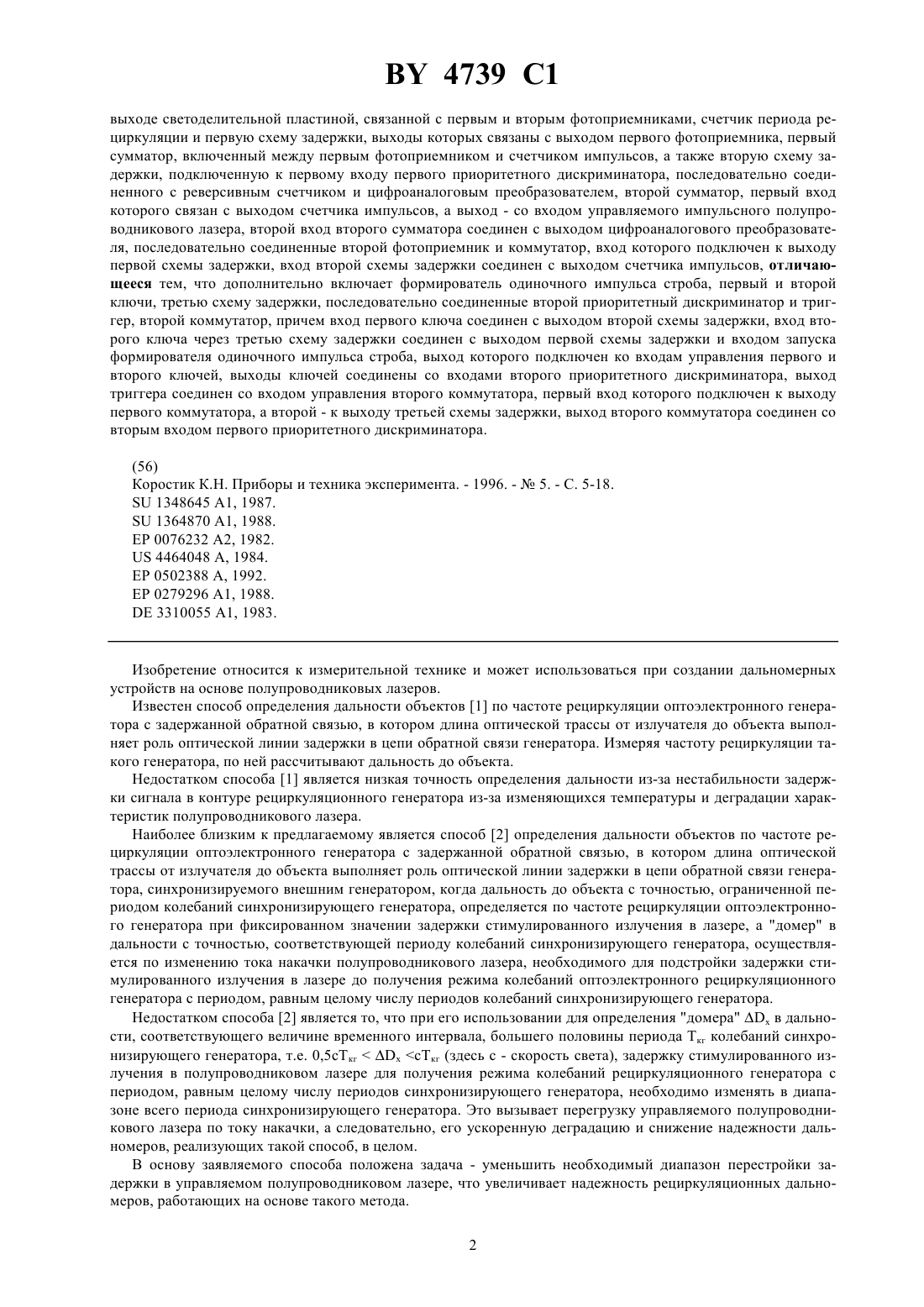
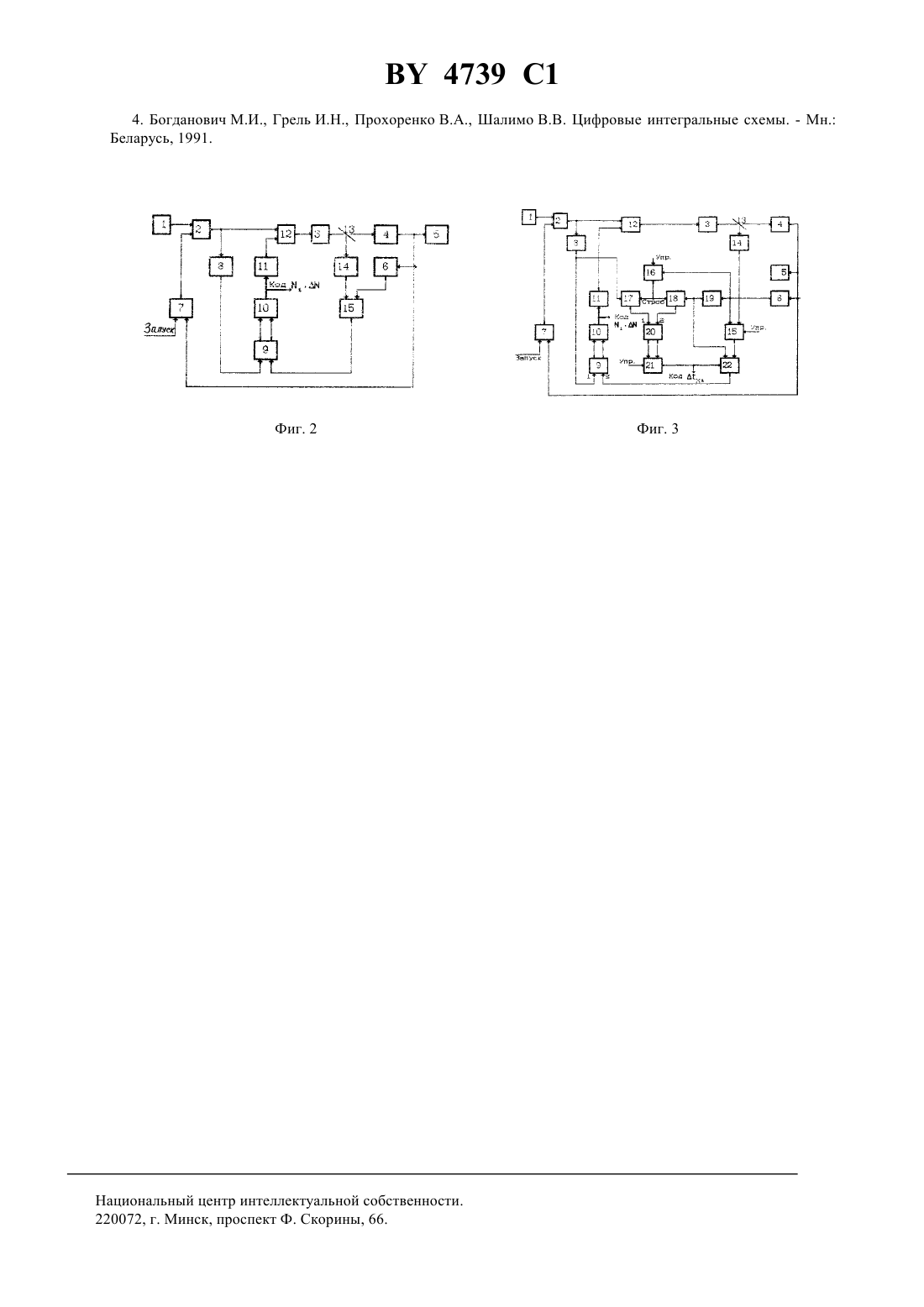
01 17/10 НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ(71) Заявитель Белорусский государственный университет(73) Патентообладатель Белорусский государственный университет(57) 1. Способ определения дальности объекта, заключающийся в организации процесса рециркуляции оптоэлектронного генератора, в котором в качестве оптической линии задержки используют измеряемое расстояние, путем направления на объект импульсного излучения полупроводникового лазера с последующим запуском полупроводникового лазера при помощи принятого излучения, при этом частоту рециркуляции оптоэлектронного генератора синхронизируют с внешним генератором, и определении дальности объекта по частоте рециркуляции оптоэлектронного генератора при фиксированном значении задержки стимулированного излучения в полупроводниковом лазере с точностью, величина которой ограничена величиной периода колебаний синхронизирующего генератора, отличающийся тем, что осуществляют домер дальности в пределах, ограниченных величиной периода колебаний синхронизирующего генератора, при этом сначала определяют домер дальности в пределах, ограниченных величиной половины периода колебаний синхронизирующего генератора, а оставшуюся часть домера определяют по изменению тока инжекции полупроводникового лазера, необходимого для получения режима колебаний оптоэлектронного генератора с периодом, равным целому числу полупериодов колебаний синхронизирующего генератора. Фиг. 1 2. Устройство для определения дальности объекта, содержащее последовательно соединенные кварцевый генератор и счетчик импульсов, управляемый импульсный полупроводниковый лазер с расположенной на 4739 1 выходе светоделительной пластиной, связанной с первым и вторым фотоприемниками, счетчик периода рециркуляции и первую схему задержки, выходы которых связаны с выходом первого фотоприемника, первый сумматор, включенный между первым фотоприемником и счетчиком импульсов, а также вторую схему задержки, подключенную к первому входу первого приоритетного дискриминатора, последовательно соединенного с реверсивным счетчиком и цифроаналоговым преобразователем, второй сумматор, первый вход которого связан с выходом счетчика импульсов, а выход - со входом управляемого импульсного полупроводникового лазера, второй вход второго сумматора соединен с выходом цифроаналогового преобразователя, последовательно соединенные второй фотоприемник и коммутатор, вход которого подключен к выходу первой схемы задержки, вход второй схемы задержки соединен с выходом счетчика импульсов, отличающееся тем, что дополнительно включает формирователь одиночного импульса строба, первый и второй ключи, третью схему задержки, последовательно соединенные второй приоритетный дискриминатор и триггер, второй коммутатор, причем вход первого ключа соединен с выходом второй схемы задержки, вход второго ключа через третью схему задержки соединен с выходом первой схемы задержки и входом запуска формирователя одиночного импульса строба, выход которого подключен ко входам управления первого и второго ключей, выходы ключей соединены со входами второго приоритетного дискриминатора, выход триггера соединен со входом управления второго коммутатора, первый вход которого подключен к выходу первого коммутатора, а второй - к выходу третьей схемы задержки, выход второго коммутатора соединен со вторым входом первого приоритетного дискриминатора. Изобретение относится к измерительной технике и может использоваться при создании дальномерных устройств на основе полупроводниковых лазеров. Известен способ определения дальности объектов 1 по частоте рециркуляции оптоэлектронного генератора с задержанной обратной связью, в котором длина оптической трассы от излучателя до объекта выполняет роль оптической линии задержки в цепи обратной связи генератора. Измеряя частоту рециркуляции такого генератора, по ней рассчитывают дальность до объекта. Недостатком способа 1 является низкая точность определения дальности из-за нестабильности задержки сигнала в контуре рециркуляционного генератора из-за изменяющихся температуры и деградации характеристик полупроводникового лазера. Наиболее близким к предлагаемому является способ 2 определения дальности объектов по частоте рециркуляции оптоэлектронного генератора с задержанной обратной связью, в котором длина оптической трассы от излучателя до объекта выполняет роль оптической линии задержки в цепи обратной связи генератора, синхронизируемого внешним генератором, когда дальность до объекта с точностью, ограниченной периодом колебаний синхронизирующего генератора, определяется по частоте рециркуляции оптоэлектронного генератора при фиксированном значении задержки стимулированного излучения в лазере, а домер в дальности с точностью, соответствующей периоду колебаний синхронизирующего генератора, осуществляется по изменению тока накачки полупроводникового лазера, необходимого для подстройки задержки стимулированного излучения в лазере до получения режима колебаний оптоэлектронного рециркуляционного генератора с периодом, равным целому числу периодов колебаний синхронизирующего генератора. Недостатком способа 2 является то, что при его использовании для определения домерав дальности, соответствующего величине временного интервала, большего половины периода Ткг колебаний синхронизирующего генератора, т.е. 0,5 сТкгсТкг (здесь с - скорость света), задержку стимулированного излучения в полупроводниковом лазере для получения режима колебаний рециркуляционного генератора с периодом, равным целому числу периодов синхронизирующего генератора, необходимо изменять в диапазоне всего периода синхронизирующего генератора. Это вызывает перегрузку управляемого полупроводникового лазера по току накачки, а следовательно, его ускоренную деградацию и снижение надежности дальномеров, реализующих такой способ, в целом. В основу заявляемого способа положена задача - уменьшить необходимый диапазон перестройки задержки в управляемом полупроводниковом лазере, что увеличивает надежность рециркуляционных дальномеров, работающих на основе такого метода. 2 4739 1 Поставленная задача решается тем, что при определении домера дальности соответствующей части периода колебаний синхронизирующего генератора он предварительно определяется с точностью, ограниченной половиной периода колебаний этого генератора, а остальная его часть определяется по изменению тока накачки полупроводникового лазера. Сущность измерения дальности заявляемым способом состоит в следующем. При организации посылки импульса излучения полупроводникового лазера, привязанной по времени к -ому периоду синхронизирующего генератора, на объект, приема отраженного сигнала и повторного запуска полупроводникового лазераизлучателя принятым сигналом с задержкойкгстискомая дальностьвыразится через измелаз ренную частоту рециркуляцииследующим образом Здесь элкг,- целое число, опт - время распространения светового сигнала на измеряемой дистанции,- временной интервал равный, рассогласованию по времени между импульсом с синхронизирующего генератора и моментом прихода отраженного импульса с дистанции. Величины эл ист в (1) известны, аподлаз лежит определению. Величинуможно представить в виде(2)12,где 1 Ткг/2 при 1 Ткг/2 и 10 при 1 Ткг/2, 2 - неизвестная часть домера после его определения с точностью до Ткг/2. Таким образом, при определениитребуется операция сравнения величини Ткг/2. При получении результатаТкг/2 величина 1 принимается равной Ткг/2, в противном случае 10. Величина 2 в (2) может быть определена из зависимости задержки генерации в полупроводниковом лазере от тока 3 лазсп/- ( ст -0 )(4)ст 0 п Здесь сп - время жизни неравновесных носителей заряда в полупроводниковом лазере,- амплитуда им пульса возбуждающего тока,ст - пороговый ток лазера при работе в стационарном режиме, 0 - ток постоп янного смещения лазера, 0 - приращение тока постоянного смещения лазера, необходимое для изменения в нем задержки генерации на 2. Можно видеть, что при таком способе определениявеличина перестройки задержки в полупроводниковом лазере не превышает Ткг/2. Этим исключается перегрузка по току накачки управляемого лазера, а следовательно, уменьшается его деградация и увеличивается надежность дальномеров, реализующих такой способ. Преимущество такого способа заключается в том, что по сравнению с известным более полно используется ресурс работы полупроводникового лазера. Благодаря этому удается повысить надежность дальномеров, работающих на основе заявляемого способа. Кроме того, повышается и быстродействие метода. Сущность изобретения поясняется чертежами. На фиг. 1 показана расчетная зависимость задержки генерации в полупроводниковом лазере от тока инжекции и необходимые диапазоны перестройки задержки генерации в лазере при определении домера заявляемым способом и согласно способу-прототипу. На фиг. 2 показана функциональная схема устройства-прототипа. На фиг. 3 приведена функциональная схема устройства, реализующего заявляемый способ измерения дальности объектов. На фиг. 1 приведена расчетная зависимость задержки генерации лаз в полупроводниковом лазере от тока постоянного смещения 0 согласно выражению (3). Расчет приведен для лазера сст 110 мА , сп 4 нс п при возбуждении его импульсами тока амплитудой 1,1 ст (кривая 1) и 1,5 ст (кривая 2). При выборе п п Ткг 5 нс и задержки генерации в лазере 6 нс (для обеспечения диапазона ее изменения в интервале всего периода Ткг), согласно кривой 1, для реализации заявляемого способа потребуется изменение тока постоянного смещения лазера 025 мА (см. точки А и В). При этом превышениетока накачки лазера над пороговым значением изменяется от(1,1 ст) /ст 1,2 лишь до(1,1 ст) /ст 1,4. В спосоп п п п бе-прототипе 072 мА (см. точки А и С), а значениев точке С достигает значения 1,9. При этом следует иметь в виду, что в начальной точке А 1,2 выбрано значительно ниже оптимального (точка Д) из соображений достаточной мощности излучения и допустимой скорости деградации (опт 1,5 - 2). При сдвиге точки А в сторону увеличения 0 (см. точки А, А и С), когда опт в начальной точке диапазона, на его конечном участке . В режиме 1,5 ст , характеризующемся зависимостью лаз(0), близкой к линейной п 3(см.крив.2), способ-прототип вообще не реализуем, в то время как для заявляемого способа 065 мА (см. точки Е, ), при этом в точкезначение 2. Таким образом, видны конкретные преимущества заявляемого способа по увеличению надежности устройств для определения дальности. Известно устройство 2, которое наиболее близко реализует заявляемый способ. Устройство содержит(фиг. 2) последовательно соединенные кварцевый генератор, счетчик импульсов 2, импульсный полупроводниковый лазер 3, первый фотоприемник 4, частотомер 5, выход фотоприемника 4 связан со входом запуска счетчика 2, первую схему задержки 6, вход которой связан с выходом первого фотоприемника 4, первый сумматор 7, включенный между фотоприемником 4 и счетчиком 2, а также последовательно соединенные вторую схему задержки 8, приоритетный дискриминатор 9, реверсивный счетчик 10 и цифроаналоговый преобразователь 11, второй сумматор 12, включенный между выходом счетчика 2 и входом полупроводникового лазера 3, второй вход второго сумматора 12 соединен с выходом цифроаналогового преобразователя 11, светоделительную пластинку 13, расположенную на выходе полупроводникового лазера 3, последовательно соединенные второй фотоприемник 14, регистрирующий часть излучения лазера 3, отраженную светоделительной пластинкой 13 и коммутатор 15, второй вход коммутатора 15 подключен к выходу первой схемы задержки 6. В таком устройстве могут возникать перегрузки управляемого полупроводникового лазера по току накачки, что снижает надежность устройства в целом. Устройство для реализации заявляемого способа (фиг. 2) содержит последовательно соединенные кварцевый генератор 1, счетчик импульсов 2, импульсный полупроводниковый лазер 3, первый фотоприемник 4,частотомер 5, выход фотоприемника 4 связан со входом запуска счетчика 2, первую схему задержки 6, вход которой связан с выходом первого фотоприемника 4, первый сумматор 7, включенный между фотоприемником 4 и счетчиком 2, а также последовательно соединенные вторую схему задержки 8, приоритетный дискриминатор 9, реверсивный счетчик 10 и цифроаналоговый преобразователь 11, второй сумматор 12, включенный между выходом счетчика 2 и входом полупроводникового лазера 3, второй вход второго сумматора 12 соединен с выходом цифроаналогового преобразователя 11, светоделительную пластинку 13, расположенную на выходе полупроводникового лазера 3, последовательно соединенные второй фотоприемник 14,регистрирующий часть излучения лазера 3, отраженную светоделительной пластинкой 13 и коммутатор 15,второй вход коммутатора 15 подключен к выходу первой схемы задержки 6, а также дополнительно введенные (см. фиг. 3) формирователь одиночного импульса строба 16, ключи 17, 18, третью схему задержки 19,последовательно соединенные второй приоритетный дискриминатор 20 и триггер 21, второй коммутатор 22,причем вход ключа 17 соединен с выходом второй схемы задержки 8, вход ключа 18 через третью схему задержки 19 соединен с выходом первой схемы задержки 6 и входом формирователя одиночного импульса строба 16, выход которого подключен ко входам управления ключей 17 и 18, выходы ключей 17 и 18 соединены со входами второго приоритетного дискриминатора 20, вход триггера 21 соединен со входом управления второго коммутатора 22, первый вход которого подключен к выходу первого коммутатора, а второй - к выходу третьей схемы задержки 19, выход второго коммутатора соединен со вторым входом первого приоритетного дискриминатора 9. Устройство (фиг. 3) работает следующим образом. Первоначально коммутаторы 15 и 22 устанавливают в состояния, при которых на выход коммутатора 22 передается сигнал с выхода приемника излучения 14, работа формирователя одиночного импульса строба 16 блокируется. При подаче запускающего импульса на вход Запуск устройства счетчик 2 начинает выделение -ого импульса из последовательности импульсов кварцевого генератора 1. Выходной импульс счетчика 2, привязанный к счетному перепаду импульсов с генератора 1, подается на полупроводниковый лазер 3, который с некоторой задержкойизлучает световой импульс, который регистрируется фотоприемником 14 и посылается на измеряемую дистанцию. Времена прихода импульсов с выхода схемы задержки 8 и коммутатора 22 сравниваются в приоритетном дискриминаторе 9. Пришедший с дистанции световой импульс регистрируется приемником излучения 4, сигнал с выхода которого через сумматор 7 поступает на вход запуска счета счетчика 2. Через интервал времени 0 хкг счетчик 2 начинает выделение -ого импульса и цикл повторяется. Пусть в первом цикле рециркуляции задержка импульса стимулированного излучения относительно импульса токане равна задержке ст в схеме задержки 8 (пусть для определенностист ). Тогда по результатам сравнения времен прилаз лаз хода импульсов на входы приоритетного дискриминатора 9 им вырабатывается импульс, который будет засчитан счетчиком 10 и на выходе цифроаналогового преобразователя 11 напряжение повысится на 0, что обеспечит приращение тока через лазер на 0. Приращению тока через полупроводниковый лазер на величину ступеньки 0 будет соответствовать изменение задержки лаз, которое определяется согласно (3), в котором вместо 0 следует подставить 0. Описанный процесс подстройки задержкист импульса излучелаз ния лазера относительно импульса тока инжекции (задается с помощью калиброванной линии задержки 8) продолжается до тех пор, пока разность времен их прихода -ст не составит величину, меньшую- врелаз 4 4739 1 менного разрешения приоритетного дискриминатора 9. Число циклов рециркуляции 1 (начальный код цифроаналогового преобразователя), необходимых для достижения режима стабилизации временного положения светового импульса полупроводникового лазера относительно токового, задержанного на время , определяется из выражения Из-за различных температурных условий, в которых проводится измерение дальности, значение 1 различно от измерения к измерению (из-за зависимостист от температуры). Однако во всех случаях после п достижения режима стабилизации при данной температуре в полупроводниковом лазере устанавливается задержкаст . Таким образом, определению 1, при котором достигается режим стабилизации, можно уподолаз бить операцию калибровки управляемой линии задержки - полупроводникового лазера. После переключения коммутатора 15 в положение, когда на его выход передается сигнал с выхода приемника излучения 4 и разблокировки формирователя одиночного импульса строба 16 по импульсу с выхода фотоприемника 4 с задержкой Ткгст запускается формирователь одиночного импульса строба, вырабалаз тывающий импульс длительностью ТкгТкг, которым открываются ключи 17 и 18. При этом если задержка в блоке 19 равна Ткг/2, то в приоритетном дискриминаторе 20 сравниваются времена прихода импульсов с задержкамиТкгст (на вх.1) и Ткг/2 кгст . Если хТкг/2, то импульс на втором лаз лаз входе приоритетного дискриминатора 20 опережает импульс на первом входе. В этом случае триггер 21 переключается в противоположное состояние (1 Ткг/2) и выходным сигналом переводит коммутатор 22 в состояние для передачи сигнала с выхода схемы задержки 19 на второй вход приоритетного дискриминатора 9. В этом случае в приоритетном дискриминаторе 9 сравниваются времена прихода сигналов с задержками 12 Ткгст (на вх.1) и Ткг/2 Ткгст . Если времена прихода этих сигналов не совпадают,лаз лаз то, как и в случае калибровки задержки в лазере осуществляется подстройка его тока смещения 0 до совмещения импульсов на входах дискриминатора 9. Послециклов рециркуляции задержка в лазере изменится таким образом, что разность времен прихода импульсов на входы приоритетного дискриминатора 9 станет меньше его временного разрешения. После этого по разности кодов цифроаналогового преобразователя(1)1 определяют искомый домер дальности в пределах половины периода кварцевого генератора, равный(7)22 сп/ст 00 . п 2 После этого полный домер в дальности(8)( 12 )кг 2 . 4 2 Если при сравнении времен прихода импульсов на входы второго приоритетного дискриминатора 20 полученокг/2, то переключение триггера 21 не происходит (10), а в первом приоритетном дискри( минаторе 9 сравниваются времена прихода сигналов с задержками 2 Ткгст и Ткгст . При нелаз лаз совпадении времен прихода этих сигналов, как и в предыдущем случае, осуществляется подстройка задержки излучения в полупроводниковом лазере. После ее подстройки домер в дальности также определяется согласно (7), (8), где 10. Следует отметить, что практическая реализация дополнительно введенных в устройство-прототип блоков не вызывает затруднений. Формирователь одиночного импульса строба 16 может быть реализован, например, на основе известного триггера с защелкой 4, ключи 17, 18 и коммутатор 22 реализуются, например,на основе логических элементов 2 И по общеизвестным схемам. Источники информации 1. Патент США 3645624, МПК 01 С 3/08, 1972. 2. Коростик К.Н. Рециркуляционный метод в прикладных исследованиях // Приборы и техника эксперимента. - 1996. -5. - С. 5 - 18. 3. Грибковский В.П. Теория поглощения и испускания света в полупроводниках. - Мн. Наука, 1974. 5 Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: G01C 3/08, G01S 17/10
Метки: устройство, дальности, определения, осуществления, способ, объекта
Код ссылки
<a href="https://by.patents.su/6-4739-sposob-opredeleniya-dalnosti-obekta-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" rel="bookmark" title="База патентов Беларуси">Способ определения дальности объекта и устройство для его осуществления</a>
Способ измерения дальности объекта (варианты)
Номер патента: 4677
Опубликовано: 30.09.2002
Авторы: Кугейко Михаил Михайлович, Коростик Константин Николаевич
МПК: G01C 3/08, G01S 17/10
Метки: варианты, объекта, дальности, способ, измерения
Текст:
...скорректированный на ослабление в среде сигнал, не зависящий от состояния среды. Устанавливая порог принятия решения о наличии отраженного излучения в соответствии с (7), таким образом исключается временная неопределенность появления импульсного отклика на выходе фотоприемника,обусловленная ослаблением излучения в атмосфере. Другими словами, исключается влияние изменения состояния среды на определение дальности до объекта, тем самым...
Акустическое устройство измерения расстояния до объекта
Номер патента: 4774
Опубликовано: 30.12.2002
Авторы: Боженков Владимир Владимирович, Осипов Анатолий Николаевич, Шахлевич Григорий Михайлович, Достанко Анатолий Павлович
МПК: G01S 15/08
Метки: устройство, расстояния, измерения, объекта, акустическое
Текст:
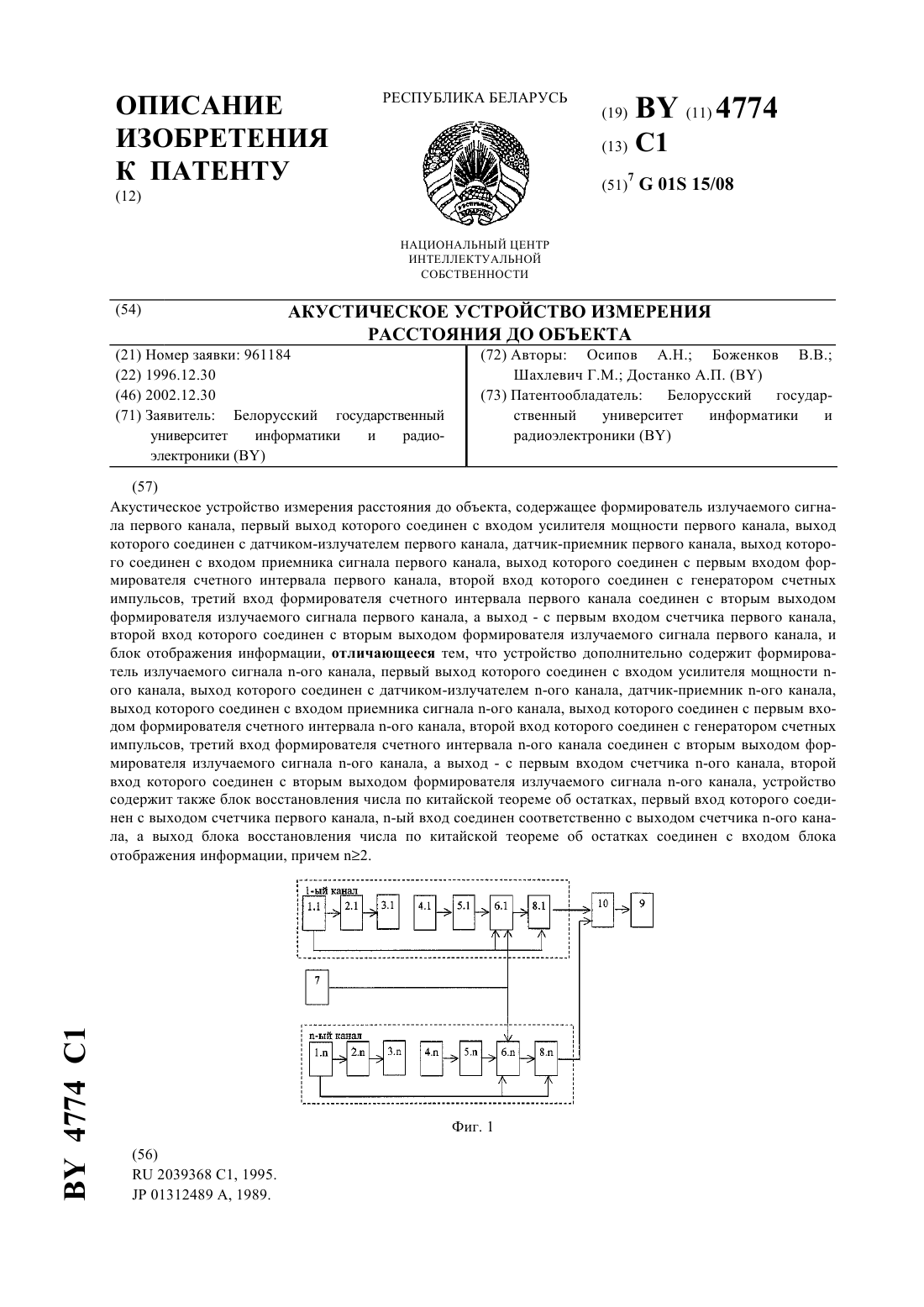
...Объект зондируетсясигналами, характеризующимися различными периодами следования сигнала, и определение расстояния до объекта производится порезультатам измерений в соответствии с китайской теоремой об остатках. Это позволяет измерять расстояние до объекта зондирующими сигналами с малой скважностью. На фиг. 1 приведена структурная схема устройства. На фиг. 2 и фиг. 3 приведены структурные схемы соответственно формирователя излучаемого...
Способ фотометрического определения дефектов и устройство для его осуществления
Номер патента: 1093
Опубликовано: 14.03.1996
Авторы: Крылов Юрий Николаевич, Казаков Николай Павлович, Соколов Евгений Александрович, Костюткин Владимир Григорьевич, Татарченко Раиса Александровна
МПК: G01N 21/55
Метки: дефектов, определения, способ, устройство, осуществления, фотометрического
Текст:
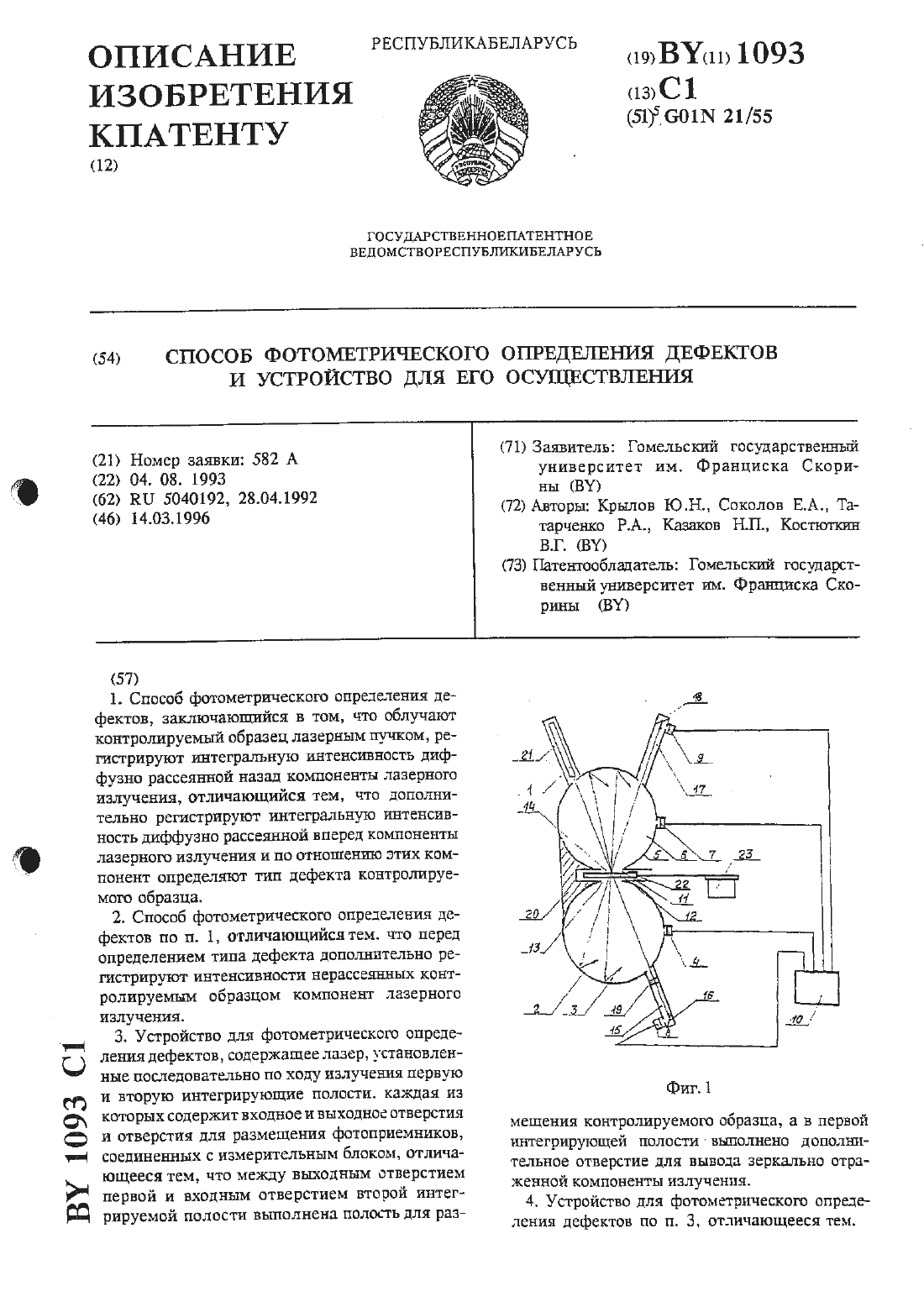
...4, фотометрический узел 5, образованный интегрирующей полостью 6 и фотоприемником 7, дополнительные фотоприемтшки 8, 9, измерительный блок 10,полость 11 для размещения контролируемого образца 12.Интегрирующие полости 6 и 3 последовательно установлены по ходу лазерного излучения. Каждая из них имеет входное и выходное отверстия, отверстие для размещения фотоприемника, а интегрирующая полость 6 дополнительное отверстие для вывода зеркально...
Способ определения потерь зерна за комбайном и устройство для его осуществления
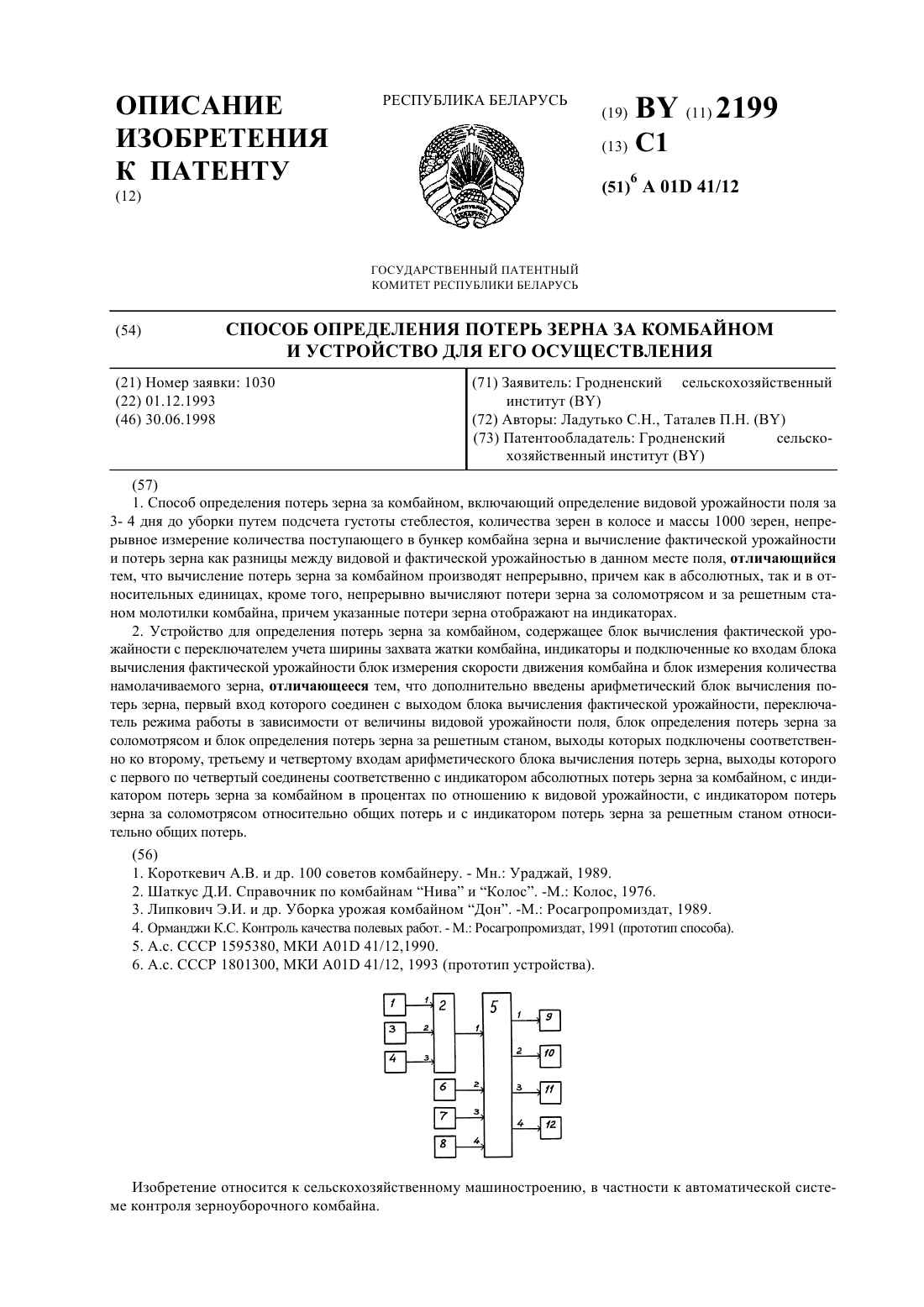
Номер патента: 2199
Опубликовано: 30.06.1998
Авторы: Таталев Павел Николаевич, Ладутько Сергей Николаевич
МПК: A01D 41/12
Метки: осуществления, определения, способ, потерь, комбайном, зерна, устройство
Текст:
...и подключенные ко входам блока вычисления фактической урожайности блок измерения скорости движения комбайна и блок измерения количества намолачиваемого зерна. Однако данное устройство не содержит блока определения полных или частичных потерь зерна. 2 2199 1 Заявляемое изобретение направлено на решение задачи, заключающейся в автоматизации процесса измерения суммарных абсолютных потерь зерна за жаткой и молотилкой комбайна, а также...
Способ записи двухчастотных голограмм и устройство для его осуществления
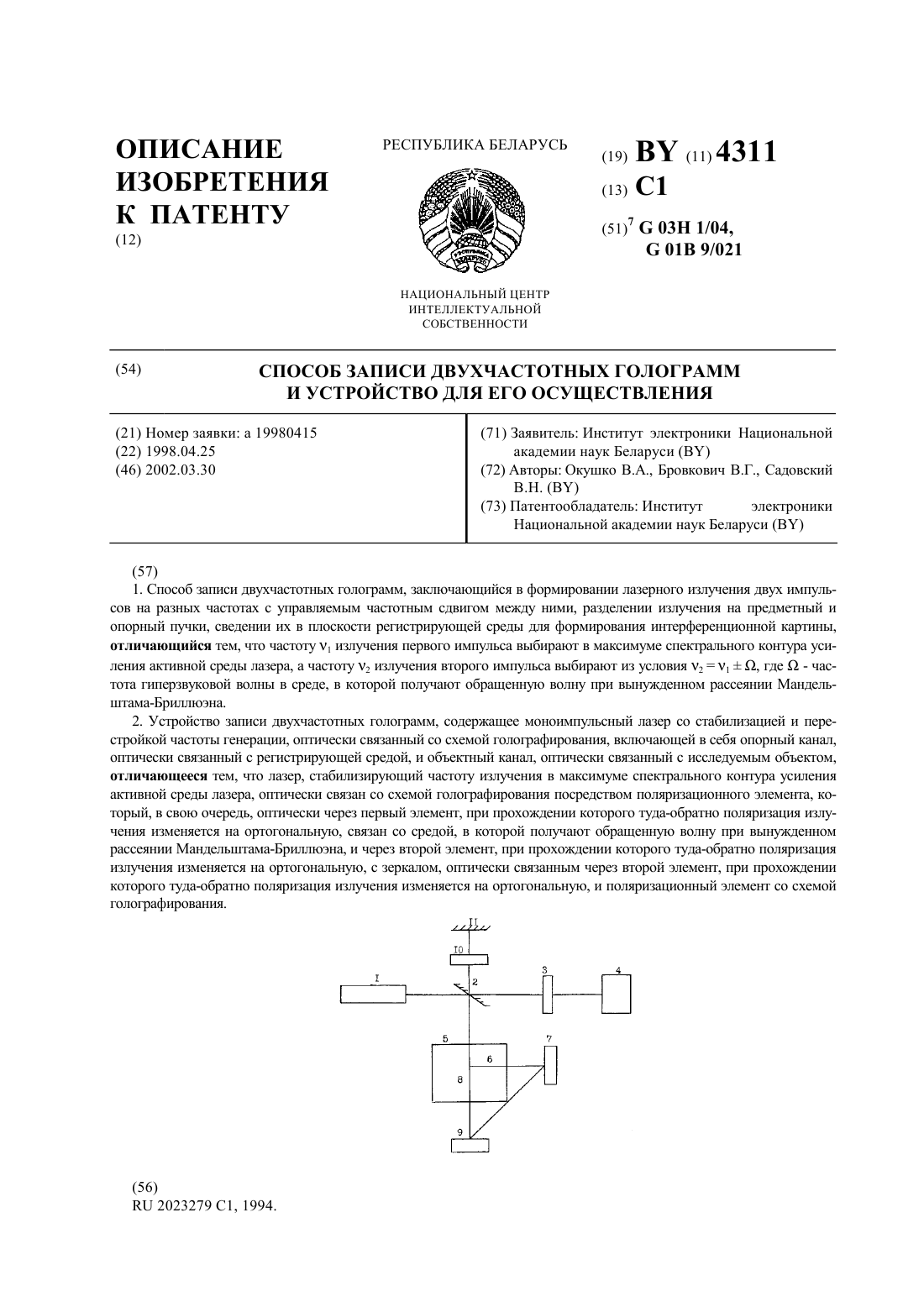
Номер патента: 4311
Опубликовано: 30.03.2002
Авторы: Садовский Владимир Николаевич, Окушко Владимир Анатольевич, Бровкович Владимир Георгиевич
МПК: G01B 9/021, G03H 1/04
Метки: способ, осуществления, голограмм, записи, устройство, двухчастотных
Текст:
...частоту излучения в максимуме спектрального контура усиления активной среды лазера,оптически связывают со схемой голографирования посредством поляризационного элемента, который, в свою очередь, оптически через первый элемент, при прохождении которого туда-обратно поляризация излучения изменяется на ортогональную, связан со средой, в которой получают обращенную волну при вынужденном рассеянии Мандельштама-Бриллюэна, и через второй...
Предыдущий патент: Устройство автоматическое открывания и закрывания створок ворот
Следующий патент: Жидкая фармацевтическая композиция в форме аэрозоля
Случайный патент: Способ получения пластификатора для бетонных смесей