Способ определения направления скважины во время ее бурения (варианты)


Текст
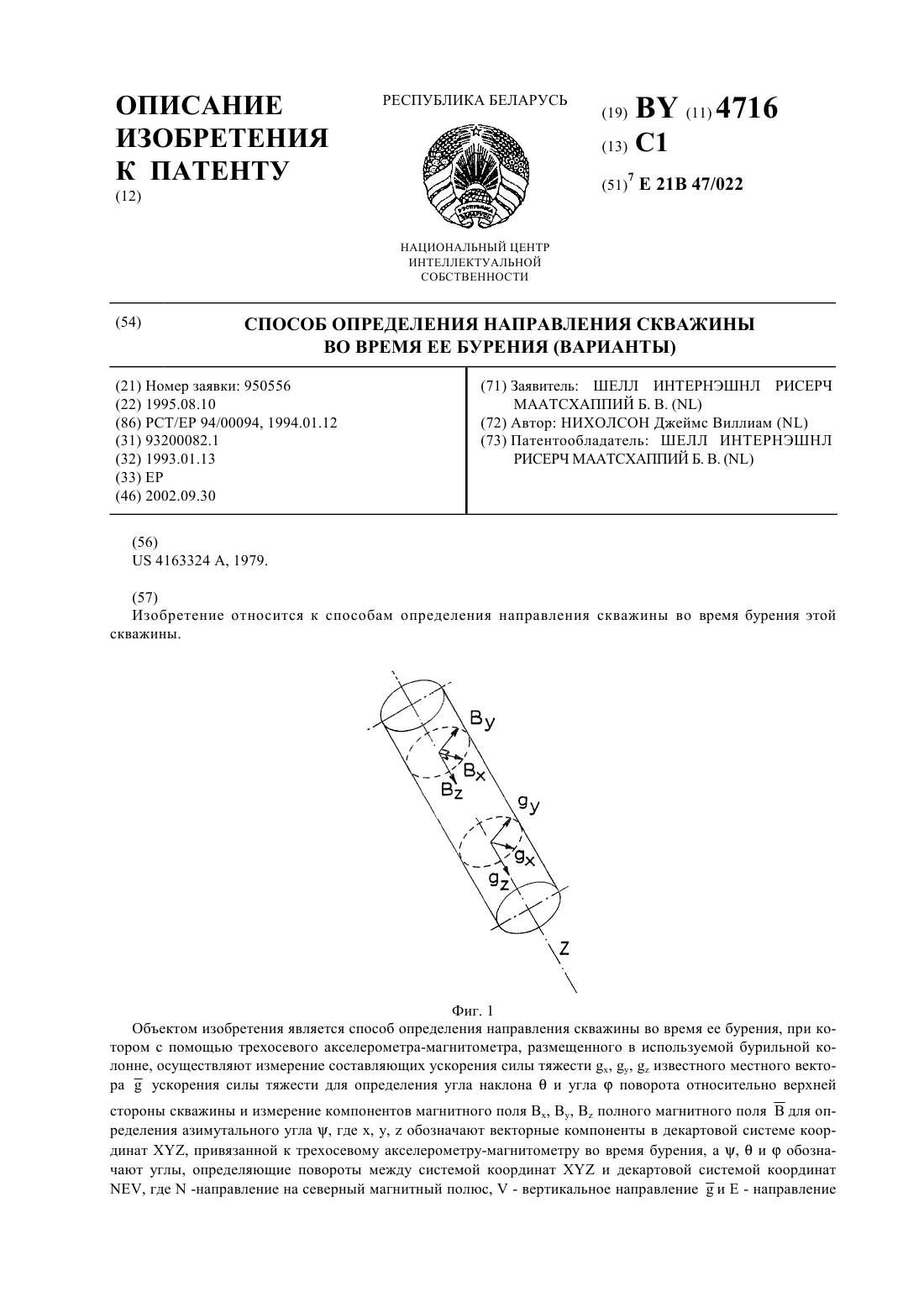
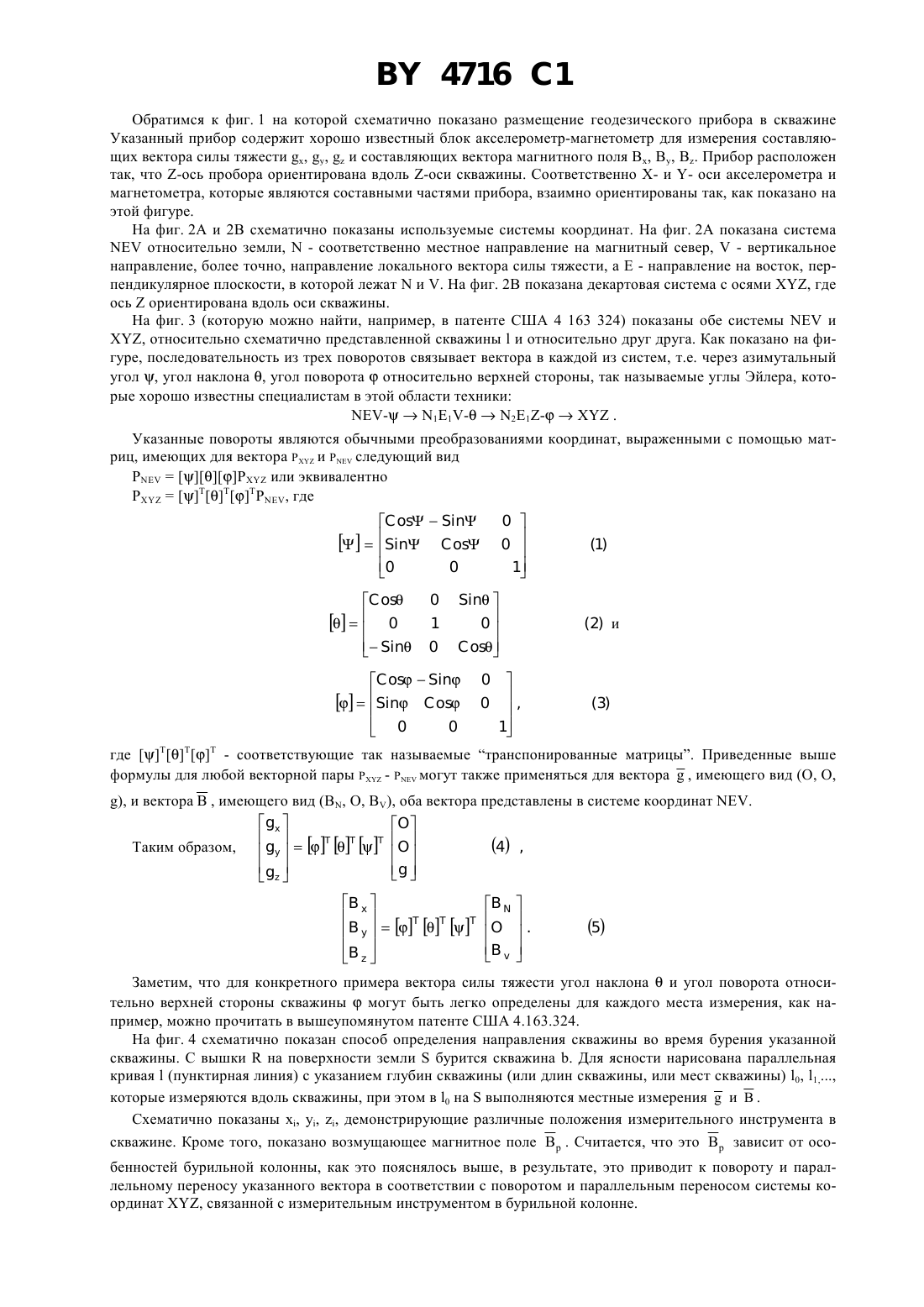
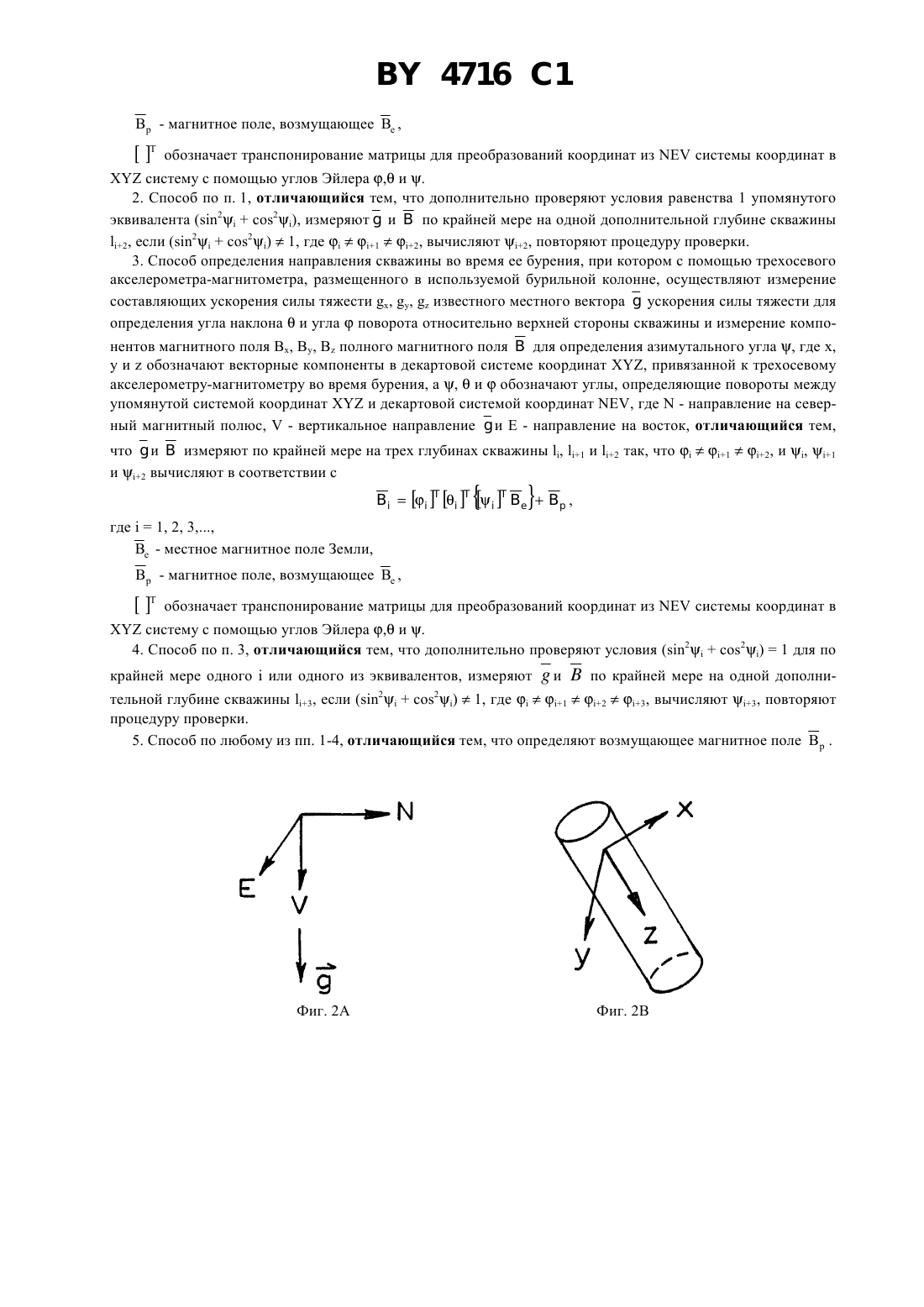
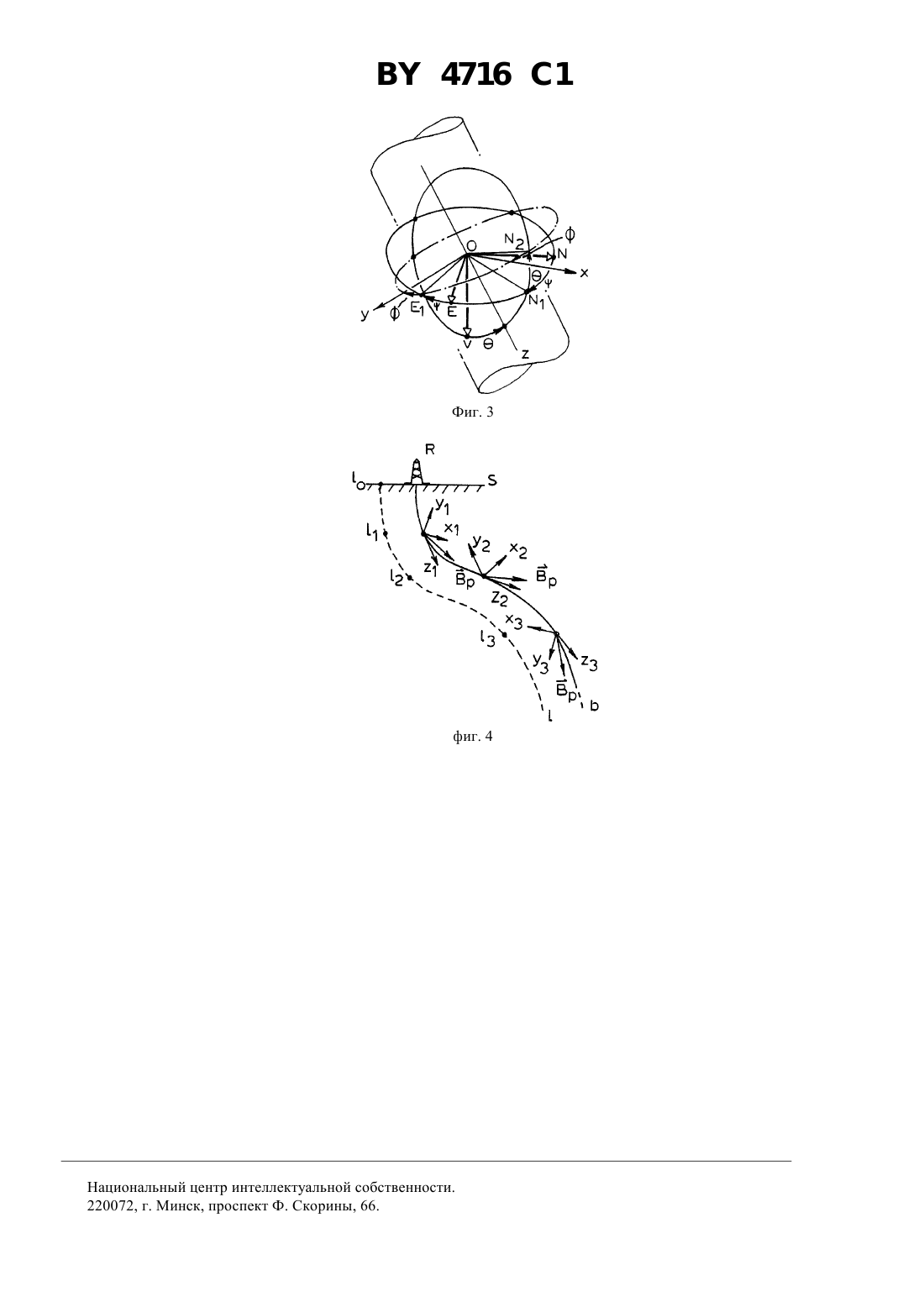
НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ СКВАЖИНЫ ВО ВРЕМЯ ЕЕ БУРЕНИЯ (ВАРИАНТЫ)(71) Заявитель ШЕЛЛ ИНТЕРНЭШНЛ РИСЕРЧ МААТСХАППИЙ Б. В.(72) Автор НИХОЛСОН Джеймс Виллиам(73) Патентообладатель ШЕЛЛ ИНТЕРНЭШНЛ РИСЕРЧ МААТСХАППИЙ Б. В.(57) Изобретение относится к способам определения направления скважины во время бурения этой скважины. Фиг. 1 Объектом изобретения является способ определения направления скважины во время ее бурения, при котором с помощью трехосевого акселерометра-магнитометра, размещенного в используемой бурильной колонне, осуществляют измерение составляющих ускорения силы тяжести , ,известного местного вектораускорения силы тяжести для определения угла наклонаи углаповорота относительно верхней стороны скважины и измерение компонентов магнитного поля , у, В полного магнитного полядля определения азимутального угла , где , у,обозначают векторные компоненты в декартовой системе координат , привязанной к трехосевому акселерометру-магнитометру во время бурения, а ,иобозначают углы, определяющие повороты между системой координати декартовой системой координат, где-направление на северный магнитный полюс,- вертикальное направлениеи Е - направление 4716 1 на восток,иизмеряют по крайней мере на двух глубинах скважины , и 1 так, что 1,и 1 вычисляют в соответствии с 11 или одним из его эквивалентов,где 1, 2 - местное магнитное поле Земли, - магнитное поле, возмущающее,обозначает транспонирование матрицы для преобразований координат изсистемы координат в систему с помощью углов Эйлера ,и . 2 н.з. 3 з.п. ф-лы, 4 фиг. Изобретение относится к способам определения направления скважины во время бурения этой скважины. В частности, изобретение относится к способу определения направления скважины во время бурения этой скважины путем использования трехосевого блока акселерометр/магнетометр, установленного в применяемой бурильной колонне, при этом указанный способ включает этапы измерение составляющих ускорения силы тяжести , , , известного местного вектораускорения силы тяжести для определения угла наклонаи угла поворотаотносительно верхней стороны скважины,измерение составляющих магнитного поля В, В,полного магнитного полядля определения азимутального угла , х, у,обозначают составляющие вектора в декартовой системе координат , привязанной к упомянутому блоку, во время упомянутого бурения, аиобозначают углы, определяющие повороты между системой координати декартовой системой координат , где- направление на магнитный север,- вертикальное-направление и Е - направление на восток. Такой способ известен из патента США 4.163.324. В нем показано использование бурильной колонны,содержащей буровую головку, которая связана с одной стороны с немагнитной утяжеленной трубой бурильной колонны, а с другой стороны с набором утяжеленных бурильных труб из магнитного материала. В свою очередь упомянутый набор связан с бурильной трубой. Немагнитная труба содержит геодезический прибор,например трехосевой блок акселерометр-магнетометр. При измерении полного магнитного полядополнительно к магнитному полю земливключается возмущающее магнитное поле, например от выше упомянутого бурового долота и/или набора утяжеленных труб. В указанном патенте предполагается, что для учета влияния магнитной бурильной колонны достаточно только использовать аппроксимацию векторана ось скважины , которая дает . . Указанное предположение приводит к тому, что на первом этапе вычисляется неправильный азимут, а на следующем этапе применяется метод итераций для определения, по меньшей мере, поправки первого порядка. Во многих случаях, однако, допущение, сделанное только относительно . и аппроксимация . приводят к результатам далеким от реальных. В патенте США 4.682.421 представлен способ определения правильного полярного угла путем вычисления возмущающего ошибочного магнитного поляв месте нахождения прибора. В частности, раскрыт двухступенчатый подход к решению вышеупомянутой проблемы. После определения вектора ускорения силы тяжестии измерения полного магнитного поля, которое равно,на первом этапе определяется составляющая, лежащая в плоскости перпендикулярной оси,. Для осуществления указанного первого этапа необходимо выполнить, по крайней мере, три х-у-измерений, посколькувыводится графически из круга, построенного на основании упомянутых измерений. Следовательно, упомянутые измерения выполняются при вращении бурильной колонны на одном месте относительно оси скважины, которая является осьюв системе координат при измерениях. Специалистам в данной области техники понятно, что упомянутое вращение бурильной колонны в упомянутом месте будет приводить к задержке процесса бурения скважины. В этом патенте показано, как на втором этапе геометрически определяется. Однако применение правила косинуса (как показано на фиг. 3 указанного патента) для получения минимальной величины ошибки должно математически ограничиваться плоскостью, содержащей все релевантные параметры, включаяи 0, поэтому определение величины по представленному методу может рассматриваться только как аппроксимация. Следовательно, возможные ошибки визависят от ошибок в параметрах, уже используемых в упомянутом правиле косинуса. 4716 1 Задачей изобретения является решение проблемы, связанной с необходимостью поворота бурильной колонны каждый раз, когда требуется определить направление скважины и снижение ошибок при вычислении. Для решения поставленной задачи предлагается способ определения направления скважины во время ее бурения, при котором с помощью трехосевого акселерометра-магнитометра, размещенного в используемой бурильной колонне, осуществляют измерение составляющих ускорения силы тяжести , ,известного местного вектораускорения силы тяжести для определения угла наклонаи углаповорота относительно верхней стороны скважины и измерение компонентов магнитного поля , , В полного магнитного полядля определения азимутального угла , где х, у,обозначают векторные компоненты в декартовой системе координат , привязанной к трехосевому акселерометру-магнитометру во время бурения, а ,иобозначают углы, определяющие повороты между системой координати декартовой системой координат , где- направление на северный магнитный полюс,- вертикальное направлениеи Е - направление на восток,иизмеряют по крайней мере на двух глубинах скважиныи 1 так, что 1, и 1 вычисляют в соответствии с 11 или одним из его эквивалентов,где 1, 2 - местное магнитное поле Земли, - магнитное поле, возмущающее,обозначает транспонирование матрицы для преобразований координат изсистемы координат в систему с помощью углов Эйлера , и . В предпочтительном варианте дополнительно проверяют условия равенства 1 упомянутого эквивалента(22), измеряютипо крайней мере на одной дополнительной глубине скважины 2, если(22)1, где 12, вычисляют 2, повторяют процедуру проверки. При осуществлении способа по второму вариантуиизмеряют по крайней мере на трех глубинах скважины , 1 и 2 так, что 12, и , 1 и 2 вычисляют в соответствии с где 1, 2, 3, - местное магнитное поле Земли, - магнитное поле, возмущающее,обозначает транспонирование матрицы для преобразований координат изсистемы координат в систему с помощью углов Эйлера , и . В предпочтительном варианте выполнения способа по второму варианту дополнительно проверяют условия (22 )1 для по крайней мере одногоили одного из эквивалентов, измеряютипо край ней мере на одной дополнительной глубине скважины 3, если (22)1, где 123,вычисляют 3, повторяют процедуру проверки. Кроме того, в любом варианте выполнения способа предпочтительно определяют возмущающее магнит ное поле. Способ по изобретению обеспечивает определение полярных углов (азимутов) в результате прямых вычислений. Кроме того, в соответствии с предложенным способом величины параметров вычисляются независимо,благодаря чему происходит снижение ошибок при вычислениях. Далее изобретение раскрыто более подробно на примере со ссылкой на поясняющие чертежи, где Фиг. 1 изображает обычное размещение блока акселерометр-магнетометр в скважине для измеренияиотносительно одной и той же декартовой системы координат, Фиг. 2 А и 2 В - систему , привязанную к земле и закрепленному инструменту, и систему координат, связанную с измерительным блоком. Фиг. 3 - общеизвестные принципы ориентации системы координат и направления скважины, связанные с преобразованиями координат через угол Эйлера, и Фиг. 4 схематично представляет способ определения направления скважины во время бурения в соответствии с настоящим изобретением. 4716 1 Обратимся к фиг. 1 на которой схематично показано размещение геодезического прибора в скважине Указанный прибор содержит хорошо известный блок акселерометр-магнетометр для измерения составляющих вектора силы тяжести , ,и составляющих вектора магнитного поля , В, В. Прибор расположен так, что -ось пробора ориентирована вдоль -оси скважины. Соответственно Х- и - оси акселерометра и магнетометра, которые являются составными частями прибора, взаимно ориентированы так, как показано на этой фигуре. На фиг. 2 А и 2 В схематично показаны используемые системы координат. На фиг. 2 А показана системаотносительно земли,- соответственно местное направление на магнитный север,- вертикальное направление, более точно, направление локального вектора силы тяжести, а Е - направление на восток, перпендикулярное плоскости, в которой лежати . На фиг. 2 В показана декартовая система с осями , где осьориентирована вдоль оси скважины. На фиг. 3 (которую можно найти, например, в патенте США 4 163 324) показаны обе системыи, относительно схематично представленной скважиныи относительно друг друга. Как показано на фигуре, последовательность из трех поворотов связывает вектора в каждой из систем, т.е. через азимутальный угол , угол наклона , угол поворотаотносительно верхней стороны, так называемые углы Эйлера, которые хорошо известны специалистам в этой области техники-11-21-. Указанные повороты являются обычными преобразованиями координат, выраженными с помощью матриц, имеющих для вектораиследующий видили эквивалентно, где где- соответствующие так называемые транспонированные матрицы. Приведенные выше формулы для любой векторной пары-могут также применяться для вектора, имеющего вид (О, О,), и вектора, имеющего вид (, , ), оба вектора представлены в системе координат . Заметим, что для конкретного примера вектора силы тяжести угол наклонаи угол поворота относительно верхней стороны скважинымогут быть легко определены для каждого места измерения, как например, можно прочитать в вышеупомянутом патенте США 4.163.324. На фиг. 4 схематично показан способ определения направления скважины во время бурения указанной скважины. С вышкина поверхности землибурится скважина . Для ясности нарисована параллельная кривая(пунктирная линия) с указанием глубин скважины (или длин скважины, или мест скважины) 0, 1 которые измеряются вдоль скважины, при этом в 0 навыполняются местные измеренияи. Схематично показаны х, у, , демонстрирующие различные положения измерительного инструмента в скважине. Кроме того, показано возмущающее магнитное поле. Считается, что этозависит от особенностей бурильной колонны, как это пояснялось выше, в результате, это приводит к повороту и параллельному переносу указанного вектора в соответствии с поворотом и параллельным переносом системы координат , связанной с измерительным инструментом в бурильной колонне. 4716 1 Из вышеуказанного ясно, что на каждой глубине скважины или в местеполное магнитное полеможет быть записано как. Однако для вычисления этой векторной суммы должна быть выбрана общая база или общая система координат. Как пояснялось выше, обычно применяются система координати система координат . Для того чтобы получить направление скважины помимо углов ,требуется определить азимутальный угол . Таким образом, вышеупомянутая векторная сумма может быть выражена как для любой глубины скважиныили номера измерения . Из этого уравнения можно легко увидеть, что В,и В известны, поскольку они измеряются, - и -матрицы известны, поскольку вышеупомянутым способом определяютсяи ,иизвестны из геомагнитных данных и, следовательно, должны быть получены еще азимутальный уголи векторные компоненты возмущения магнитного поля В, , . Согласно изобретению, измеряются компонентыидля, по крайней мере, двух глубин скважиныи 1 которые могут быть записаны как 1 и 2. Затем, для двух измерений получают следующие уравнения путем перезаписи вышеуказанного уравнения (6)1 Можно видеть, что путем прямых вычислений вышеприведенных уравнений (7) и (8) получаются 6 скалярных уравнений для каждого из векторных компонентов х, у и , которые включают 7 неизвестных параметров, т.е. 1, 1, 2, 2, , , и В. Для того, чтобы получить единственное решение для 1 и 2 берут в качестве седьмого скалярного уравнения 21212222. Специалистам в данной области техники ясно, что могут использоваться эквивалентные уравнения 21211 или 2222. Исходя из математических со 2 отношений, очевидно, что 12 и, следовательно, бурильная колонна должна быть повернута. По существу, этот критерий выполняется всегда, потому что бурильная колонна всегда поворачивается между местами измерений во время бурения скважины. Таким образом, преимущество заключается в том, что используются повороты бурильной колонны, которые обычно осуществляют во время процесса бурения, и не происходит остановка процесса бурения и последующий поворот бурильной колонны, как в способе, на который выше была дана ссылка. После того, как вычислены величины для указанных 7 параметров, величиныполучают в соответствии с соотношением На основе той же самой идеи для трех измерений в соответственно трех местах измерений, например 1, 2 и 3, получают следующие уравнения, два из которых аналогичны приведенным выше уравнения (7) и (8)11 Из 9 скалярных уравнений, которые получаются при перезаписи вышеуказанных уравнений (7), (8) и (10),видно, что образуется полная система уравнений с 9 неизвестными параметрами, аналогичным образом, как показано выше, и никакие дополнительные уравнения не требуются для их однозначного решения. Для представленной системы уравнений 1, 1, 2, 2, 3, 3, , , и В опять могут рассматриваться как независимые переменные. Опять - величины получаются в соответствии с вышеуказанным уравнением (9). Отметим, что, как и в случае с только двумя измерениями,123 и никакие специальные действия для поворотов на требуются. Следующий вариант настоящего изобретения включает процедуру проверки. В том случае, когда измерения выполняются в двух местах 1 и 2 для проверки применяются соотношения 21211 или 22221, которые являются эквивалентами уравнения 21212222. Если появляются значительные отклонения от 1, то производится новый набор измеренийина следующей глубине скважины и процедура проверки повторяется. Преимущество в том, что для такой проверки также не требуются никакие дополнительные повороты. Опять должны быть только измерены различные углы поворота относительно верхней стороны скважины. Как и в случае выполнения измерений в, по крайней мере, трех местах и, следовательно, при использовании 9 уравнений для определения азимутальных углов 1, 2 и 3 теперь для первого раза применяют равенства 221 или один из их эквивалентов 222121 для соответствующей величины . Те же наблюдения сделаны относительно использования и применения указанной процедуры проверки. На следующем этапеможет быть определено точно и надежно. В большинстве случаевсвязано с характеристиками бурильной колонны. Кроме того, при таком определениимогут быть отслежены неожиданные изменения в, связанные, например, с неисправностью инструмента, магнитными бурями, посторонними магнитными полями и т.д. Как пояснялось выше, для одного или другого метода определения параметров требуется только два или три набора измерений соответственно. Понятно, что при нормальных условиях работы, когда выполняют скважины глубиной несколько тысяч футов или несколько километров, получают множество наборов измерений. Следовательно, направления скважины могут определяться быстро и надежно без специальных усилий. Специалистам в этой области техники из предшествующего описания будут осевидны различные модификации настоящего изобретения. Предполагается, что такие модификации входят в объем приложенной формулы изобретения. 1. Способ определения направления скважины во время ее бурения, при котором с помощью трехосевого акселерометра-магнитометра, размещенного в используемой бурильной колонне, осуществляют измерение составляющих ускорения силы тяжести , ,известного местного вектораускорения силы тяжести для определения угла наклонаи углаповорота относительно верхней стороны скважины и измерение компонентов магнитного поля , ,полного магнитного полядля определения азимутального угла , где обозначают векторные компоненты в декартовой системе координат , привязанной к трехосевому акселерометру-магнитометру во время бурения, а , , иобозначают углы, определяющие повороты между системой координати декартовой системой координат , где- направление на северный магнитный полюс,- вертикальное направлениеи Е - направление на восток, отличающийся тем, чтоиизмеряют по крайней мере на двух глубинах скважиныи 1 так, что 1,и 1 вычисляют в соответствии с 222121 или одним из его эквивалентов,где 1, 2 - местное магнитное поле Земли,4716 1- магнитное поле, возмущающее,обозначает транспонирование матрицы для преобразований координат изсистемы координат в систему с помощью углов Эйлера , и . 2. Способ по п. 1, отличающийся тем, что дополнительно проверяют условия равенства 1 упомянутого эквивалента (22), измеряютипо крайней мере на одной дополнительной глубине скважины 2, если (22)1, где 12, вычисляют 2, повторяют процедуру проверки. 3. Способ определения направления скважины во время ее бурения, при котором с помощью трехосевого акселерометра-магнитометра, размещенного в используемой бурильной колонне, осуществляют измерение составляющих ускорения силы тяжести , ,известного местного вектораускорения силы тяжести для определения угла наклонаи углаповорота относительно верхней стороны скважины и измерение компонентов магнитного поля , ,полного магнитного полядля определения азимутального угла , где , иобозначают векторные компоненты в декартовой системе координат , привязанной к трехосевому акселерометру-магнитометру во время бурения, а ,иобозначают углы, определяющие повороты между упомянутой системой координати декартовой системой координат , где- направление на северный магнитный полюс,- вертикальное направлениеи Е - направление на восток, отличающийся тем,чтоиизмеряют по крайней мере на трех глубинах скважины , 1 и 2 так, что 12, и , 1 и 2 вычисляют в соответствии с где 1, 2, 3 - местное магнитное поле Земли, - магнитное поле, возмущающее,обозначает транспонирование матрицы для преобразований координат изсистемы координат в систему с помощью углов Эйлера , и . 4. Способ по п. 3, отличающийся тем, что дополнительно проверяют условия (22)1 для по крайней мере одногоили одного из эквивалентов, измеряютипо крайней мере на одной дополнительной глубине скважины 3, если (22)1, где 123, вычисляют 3, повторяют процедуру проверки. 5. Способ по любому из пп. 1-4, отличающийся тем, что определяют возмущающее магнитное поле. Национальный центр интеллектуальной собственности. 220072, г. Минск, проспект Ф. Скорины, 66.
МПК / Метки
МПК: E21B 47/022
Метки: варианты, способ, направления, скважины, бурения, время, определения
Код ссылки
<a href="https://by.patents.su/8-4716-sposob-opredeleniya-napravleniya-skvazhiny-vo-vremya-ee-bureniya-varianty.html" rel="bookmark" title="База патентов Беларуси">Способ определения направления скважины во время ее бурения (варианты)</a>
Способ и система создания ствола скважины в почвенной формации
Номер патента: 3279
Опубликовано: 30.03.2000
Авторы: ХАРТМАНН, Робин Адрианус, МЮЛДЕР, Элвира Хендрика
МПК: G01V 3/26, E21B 47/022
Метки: скважины, способ, ствола, создания, система, формации, почвенной
Текст:
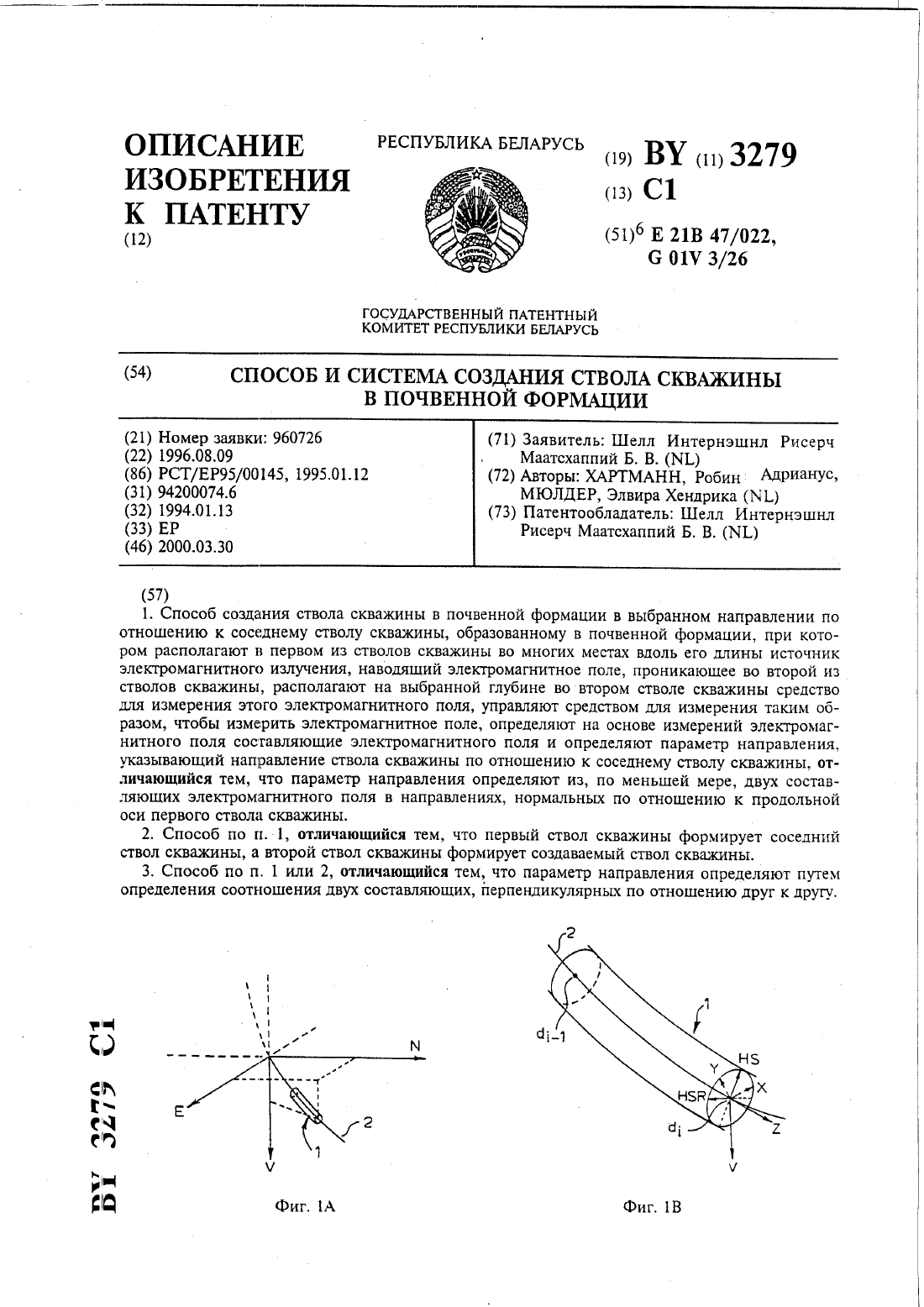
...точное измерение направления одного ствола скважины относительно другого., Задача достигается тем, что в способе создания ствола скважины в почвенной формации в выбранном направлении по отношению к соседнему стволу скважины, образованному в поч 3 венной формации, при котором располагают в первом из стволов скважины во многих местах д вдоль его длины источник электромагнитного излучения, наводящий электромагнитное...
Способ восстановления дебита водозаборной скважины
Номер патента: 2030
Опубликовано: 30.03.1998
Авторы: Шагинян Альберт Семенович, Бутько Вячеслав Александрович
МПК: E21B 43/25
Метки: восстановления, способ, скважины, дебита, водозаборной
Текст:
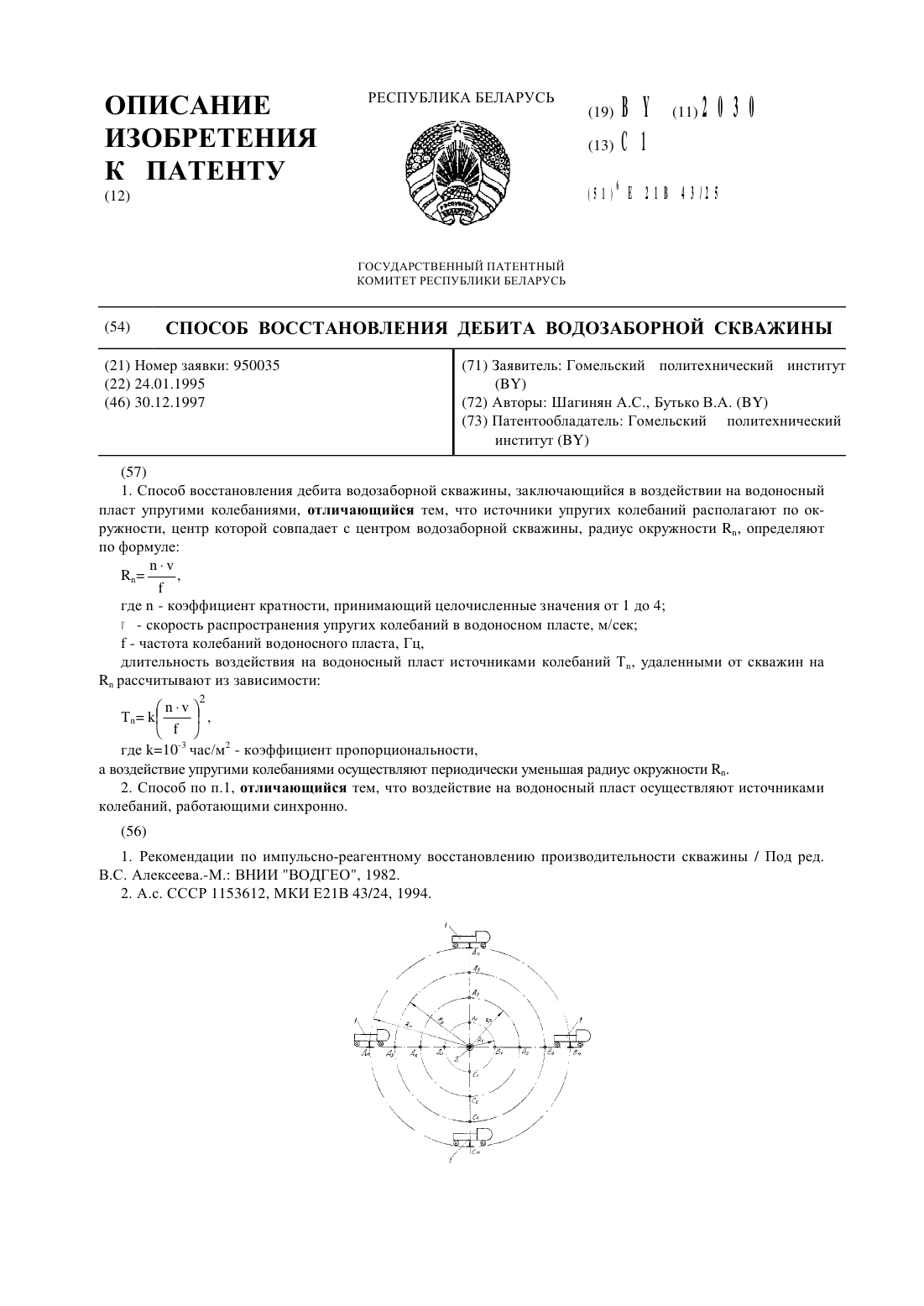
...процессами замещения воды мелкими фракциями песка и других отложений с одновременным уплотнением пласта.Осуществление сейсмических колебаний с поверхности земли управляемыми генераторами волн обеспечивает повышение энергетической эффективности воздействия и выполнение экологических требований, а использование генераторов в групповом синхронном режиме увеличивает мощность сейсмического воздействия на пласт.К числу новых возможностей...
Устройство для отбора керна с направленной кольматацией околоствольной зоны скважины
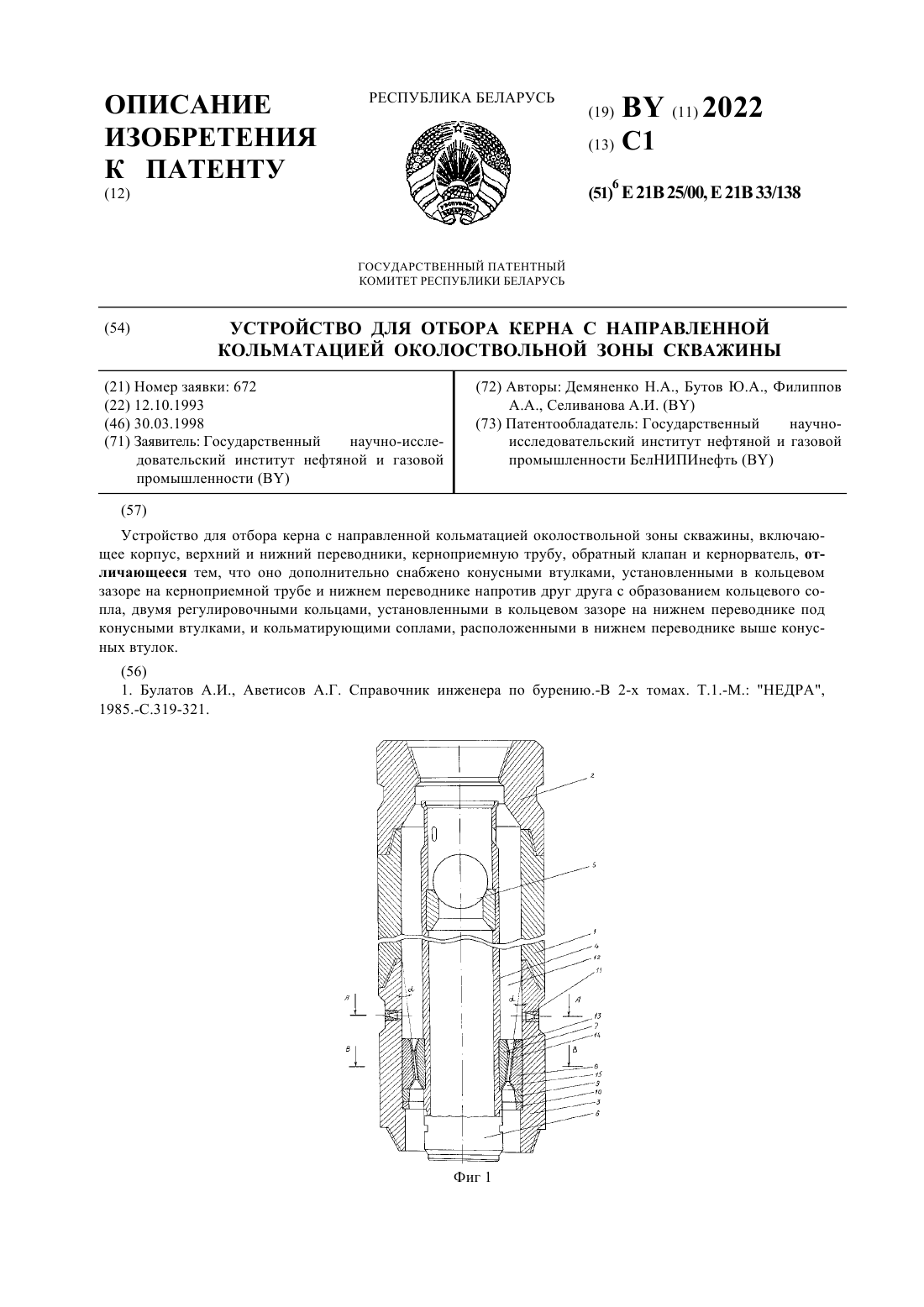
Номер патента: 2022
Опубликовано: 30.03.1998
Авторы: Бутов Юрий Александрович, Селиванова Анна Илларионовна, Филиппов Александр Александрович, Демяненко Николай Александрович
МПК: E21B 25/00, E21B 33/138
Метки: зоны, скважины, кольматацией, отбора, околоствольной, керна, устройство, направленной
Текст:
...устанавливают в компоновку бурильного инструмента над долотом (на фиг.1-3 долото не показано). Устройство работает следующим образом. Корпус 1 через присоединительный верхний переводник 2 соединяется с валом турбобура или колонной бурильных труб и приводится ими во вращение. Подаваемый буровыми насосами рабочий агент (буровой раствор) поступает из бурильных труб за счет обратного клапана 5 не в керноприемную трубу, а в кольцевое...
Способ направления воздуха для провеивания крупок и круповейка для его осуществления
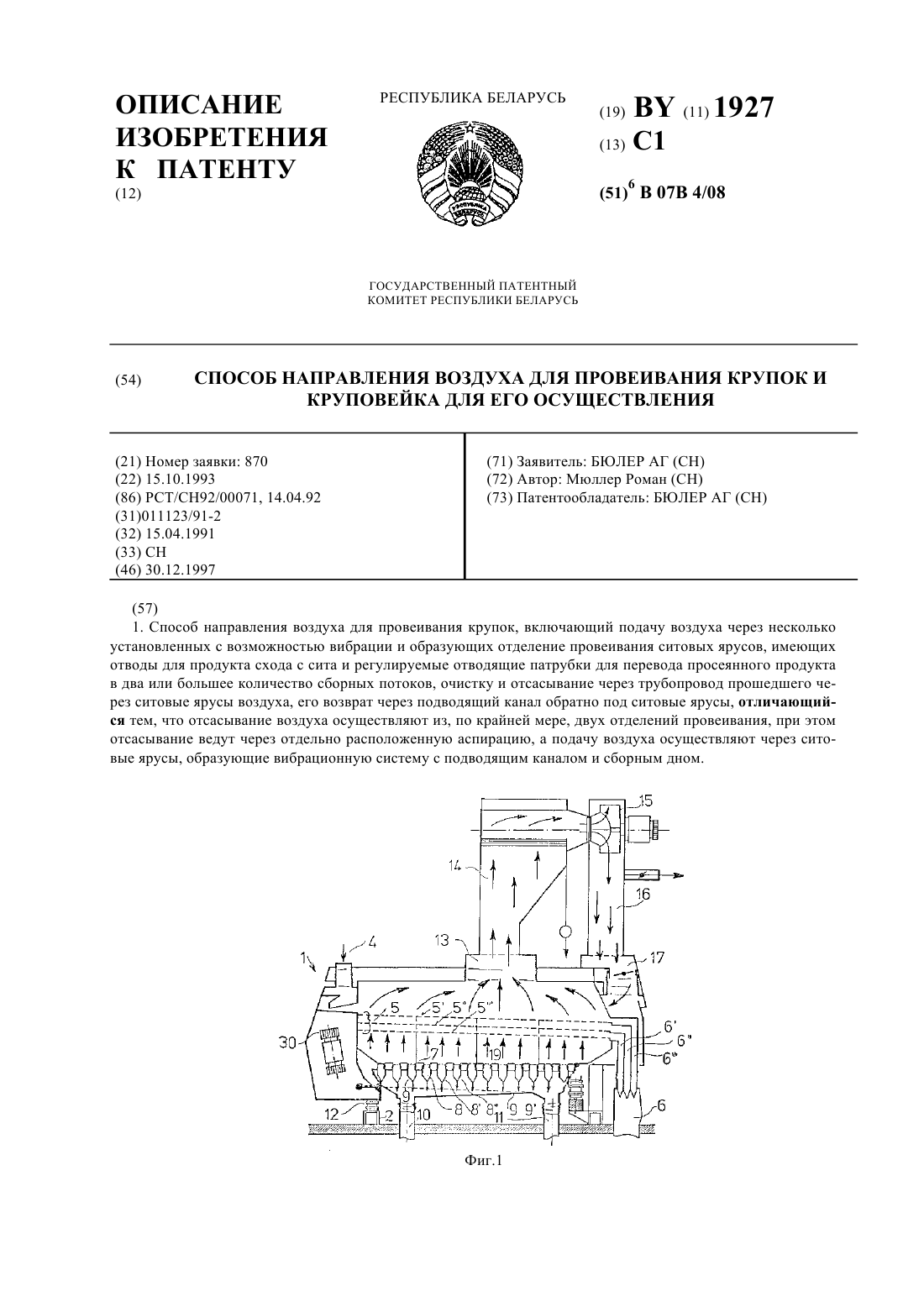
Номер патента: 1927
Опубликовано: 30.12.1997
Автор: МЮЛЛЕР РОМАН
МПК: B07B 4/08
Метки: провеивания, способ, направления, воздуха, круповейка, крупок, осуществления
Текст:
...для подвода воздуха закрытую наружу камеру для просеянного продукта, под которой расположены регулируемые рабочие патрубки для перевода просеянного продукта в два или большее количество сборных лотков, ситовые ярусы с каналом для подвода воздуха и сборным дном соединены в вибрационную систему. Причем приспособление для подвода воздуха в канал для подвода воздуха расположено в верхней части на концевой стороне круповейки напротив...
Устройство для тушения фонтанирующего источника пожара на устье скважины
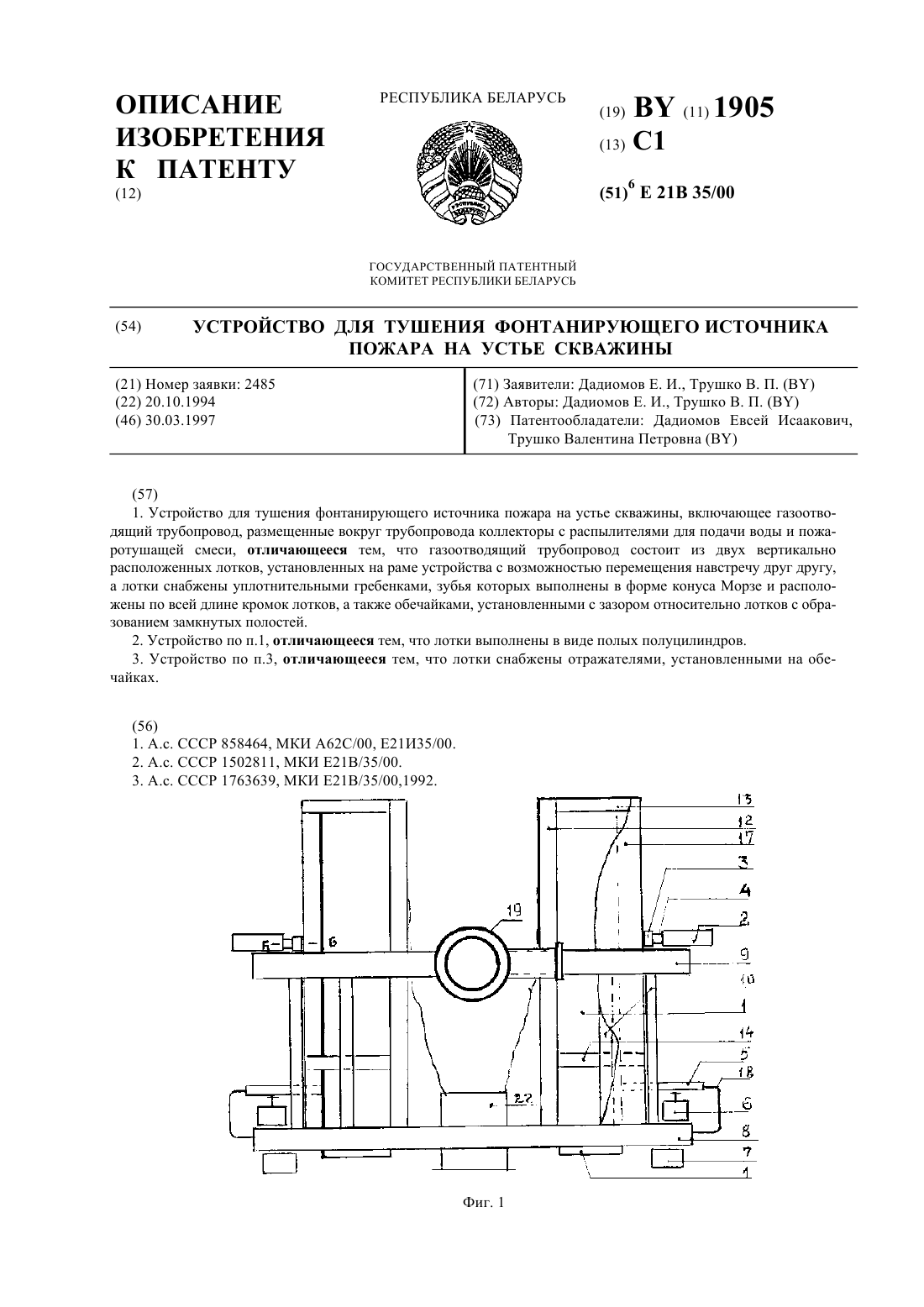
Номер патента: 1905
Опубликовано: 30.12.1997
Авторы: Трушко Валентина Петровна, Дадиомов Евсей Исаакович
МПК: E21B 35/00
Метки: пожара, тушения, устройство, устье, источника, фонтанирующего, скважины
Текст:
...тушения фонтанирующего источника пожара на устье скважины - вид спереди на фиг. 2 - вид сверху на фиг. 3 - узел скользящей подвески лотков на фиг. 4 - схема охлаждения устройства на фиг. 5 - лоток с соплами, коллекторами. Устройство состоит из двух стальных лотков 1, установленных на раме устройства с возможностью перемещения навстречу друг другу, например гидродомкратами 2 (фиг.1, 2), образующих цельный газопровод. Лотки 1 закреплены на...
Предыдущий патент: N-алкил-2-замещенные аналоги АТФ и способ их получения
Следующий патент: Устройство для сжатия информации
Случайный патент: Преобразователь выходного сигнала дифференциально-трансформаторного датчика в цифровой код