Способ измерения ускорения свободного падения
Номер патента: 11135
Опубликовано: 30.10.2008
Авторы: Тявловский Андрей Константинович, Джилавдари Игорь Захарович
Текст
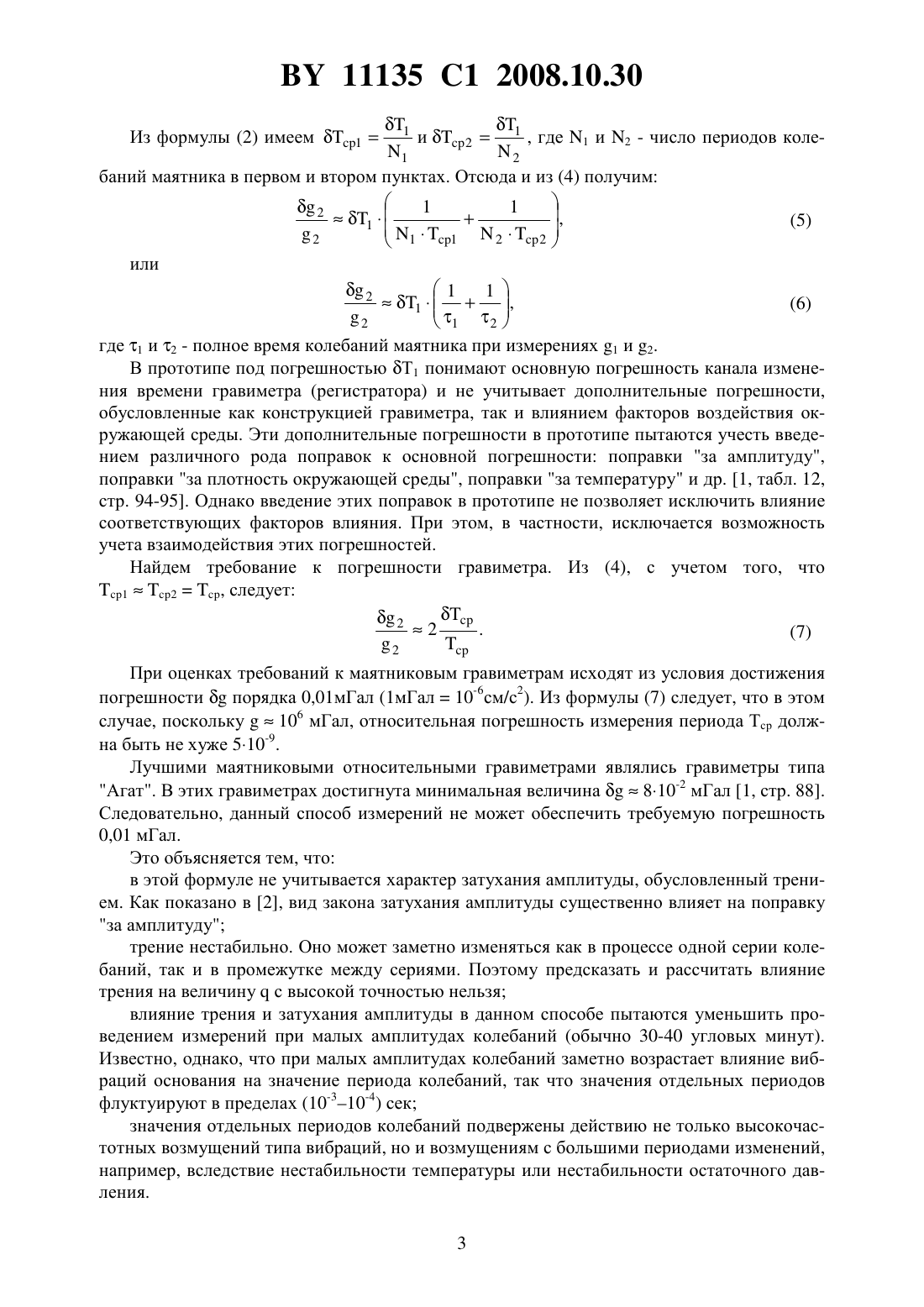
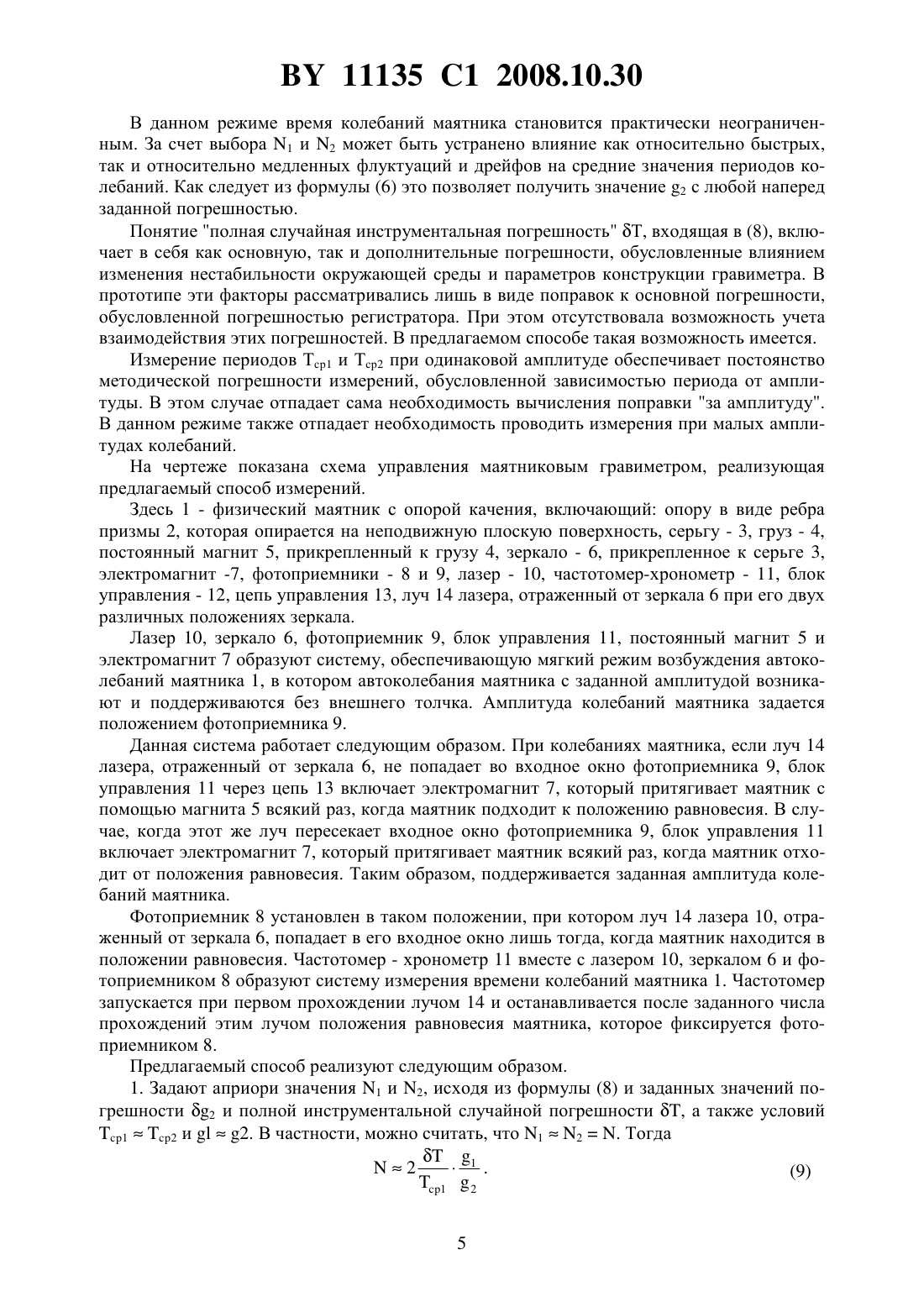
(51) МПК (2006) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ(71) Заявитель Белорусский национальный технический университет(72) Авторы Джилавдари Игорь Захарович Тявловский Андрей Константинович(73) Патентообладатель Белорусский национальный технический университет(57) 1. Способ измерения ускорения свободного падения, при котором возбуждают колебания физического маятника, измеряют среднее значение его периода колебаний Тср 1 в первом пункте с известным значением ускорения свободного падения 1, измеряют среднее значение его периода колебаний Тср 2 во втором пункте с неизвестным значением ускорения свободного падения 2 и величину 2 определяют из выражения ср 2 ср 12121,ср 2 отличающийся тем, что измерения периодов колебаний Тср 1 и Тср 2 проводят в режиме автоколебаний физического маятника. 2. Способ по п. 1, отличающийся тем, что периоды колебаний Тср 1 и Тср 2 физического маятника определяют путем измерения времени 1 и 2 заданного числа 1 и 2 полных периодов колебаний на соответствующих пунктах, так что 11 и 22 , причем 1 2 числа 1 и 2 задают, исходя из допускаемой погрешности 2, которая удовлетворяет равенству 11135 1 2008.10.30 где- полная случайная инструментальная погрешность однократного измерения интервала времени. 3. Способ по п. 1, отличающийся тем, что периоды колебаний Тср 1 и Тср 2 физического маятника измеряют при одинаковой амплитуде колебаний. Изобретение относится к области измерительной техники и может быть использовано при измерениях изменений ускорения свободного падения в различных геодезических пунктах. Известен способ относительных измерений ускорения свободного падения 1, 27 путем измерения деформаций упругих подвесов, удерживающих пробную массу, под действием этой силы. Основной недостаток этого способа состоит в том, что любые упругие подвесы, независимо от их конструкций, подвержены дрейфу, в результате которого они нуждаются в регулярной калибровке в геодезических пунктах с известным абсолютным значением силы тяжести. После такой калибровки приборы могут сохранять свою потенциальную точность, в лучшем случае, всего несколько часов. Известен маятниковый способ измерения ускорения свободного падения 1, 14 между геодезическими пунктами пунктом определения неизвестного значенияи исходным пунктом с известным значением- прототип. В этом способе возбуждают свободные колебания физического маятника, задают начальную 0 и конечнуюамплитуды колебаний, измеряют в исходном пункте средний период колебаний Тср 1 затухающих колебаний маятника в пределах выбранного углового интервала, также измеряют в данном угловом интервале средний период колебаний Тср 2 в определяемом пункте и вычисляют значение ускорения свободного падения 2 в определяемом пункте по формуле 212121,(1)2 где 1 значение ускорения свободного падения в исходном пункте. Основной недостаток этого способа состоит в низкой точности измерений и сложности процедуры измерений. Этот недостаток обусловлен, главным образом, малым временем измерений, которое, в свою очередь, связано с затуханием колебаний из-за наличия трения. Поскольку в (1) в качестве измеряемого параметра входит время, погрешность измерения 2 обусловлена, в конечном счете, погрешностью измерения времени. Пусть инструментальная погрешность однократного измерения интервала времени равна Т 1 и пусть полное время колебаний в заданном интервале изменения амплитуды. Отсюда, учитывая, что- постоянная величина, получим соотношение, связывающее погрешность Тср измерения Тср и погрешностьизмерения. При измерении временисекундомер включается и выключается один раз (при этом значение измеряемого интервала времени не влияет на погрешность ). Следовательно,погрешностьТ 1 . Отсюда и из предыдущей формулы имеем и 21 , где 1 и 2 - число периодов коле 1 2 баний маятника в первом и втором пунктах. Отсюда и из (4) получим где 1 и 2 - полное время колебаний маятника при измерениях 1 и 2. В прототипе под погрешностью Т 1 понимают основную погрешность канала изменения времени гравиметра (регистратора) и не учитывает дополнительные погрешности,обусловленные как конструкцией гравиметра, так и влиянием факторов воздействия окружающей среды. Эти дополнительные погрешности в прототипе пытаются учесть введением различного рода поправок к основной погрешности поправки за амплитуду,поправки за плотность окружающей среды, поправки за температуру и др. 1, табл. 12,стр. 94-95. Однако введение этих поправок в прототипе не позволяет исключить влияние соответствующих факторов влияния. При этом, в частности, исключается возможность учета взаимодействия этих погрешностей. Найдем требование к погрешности гравиметра. Из (4), с учетом того, что 12, следует При оценках требований к маятниковым гравиметрам исходят из условия достижения погрешностипорядка 0,01 мГал (1 мГал 10-6 см/с 2). Из формулы (7) следует, что в этом случае, поскольку 106 мГал, относительная погрешность измерения периода Тср должна быть не хуже 510-9. Лучшими маятниковыми относительными гравиметрами являлись гравиметры типа Агат. В этих гравиметрах достигнута минимальная величина 810-2 мГал 1, стр. 88. Следовательно, данный способ измерений не может обеспечить требуемую погрешность 0,01 мГал. Это объясняется тем, что в этой формуле не учитывается характер затухания амплитуды, обусловленный трением. Как показано в 2, вид закона затухания амплитуды существенно влияет на поправку за амплитуду трение нестабильно. Оно может заметно изменяться как в процессе одной серии колебаний, так и в промежутке между сериями. Поэтому предсказать и рассчитать влияние трения на величинус высокой точностью нельзя влияние трения и затухания амплитуды в данном способе пытаются уменьшить проведением измерений при малых амплитудах колебаний (обычно 30-40 угловых минут). Известно, однако, что при малых амплитудах колебаний заметно возрастает влияние вибраций основания на значение периода колебаний, так что значения отдельных периодов флуктуируют в пределах (10-310-4) сек значения отдельных периодов колебаний подвержены действию не только высокочастотных возмущений типа вибраций, но и возмущениям с большими периодами изменений,например, вследствие нестабильности температуры или нестабильности остаточного давления. 3 11135 1 2008.10.30 Для того чтобы надежно снизить влияние вибраций до уровня 510-9 с требуется время измерений не менее 105 с или, примерно, 28 часов непрерывных качаний маятника, в течение которых маятник совершит 105 полных колебаний. Чтобы снизить влияние возмущений с большими периодами, время колебаний маятника должно быть еще больше. Отметим, что, с целью обеспечения необходимого уровня подавления возмущений различного характера и, главным образом, с целью подавления влияния вибраций основания, при измерениях величиныабсолютными баллистическими гравиметрами время измерений доводят до 56 часов 3, стр. 153. В данном способе измерений время колебаний маятника в заданном интервале амплитуд не превышает 30 минут, в течение которых маятник совершает, примерно, 1800 колебаний. Для уменьшения влияния вибраций в маятниковых гравиметрах используют два маятника, совершающих колебания в противофазе 1, 23. Кроме того, Вследствие большого числа источников погрешностей, их различного влияния (случайного, полусистематического, систематического) определение результирующей погрешности является сложной задачей, которая может быть достаточно уверенно решена на основе большого числа измерений, выполненных приборами разных типов при однородных условиях наблюдений 1, стр. 95. Как видим, такой подход существенно усложняет процедуру измерения и, все-таки, не обеспечивает требуемого уровня погрешности. Таким образом, суммируя, можно сказать, что основной причиной большой погрешности прототипа является малое время измерений. Задачей изобретения является увеличение точности и упрощение измерений. Решение этой задачи обеспечивается тем, что в известном способе измерения ускорения свободного падения, в котором возбуждают колебания физического маятника, измеряют среднее значение его периода колебаний Тср 1 в первом пункте с известным значением ускорения свободного падения 1, измеряют среднее значение его периода колебаний Тср 2 во втором пункте с неизвестным значением ускорения свободного падения 2 и величину 2 определяют по формуле 212121, 2 измерения Тср 1 и Тср 2 проводят в режиме автоколебаний физического маятника. В частности, в предлагаемом способе периоды колебаний Тср 1 и Тср 2 физического маятника определяют путем измерения времени 1 и 2 заданного числа 1 и 2 полных пе риодов колебаний на соответствующих пунктах, так что 11 и 22 , причем 1 2 числа 1, 2 задают, исходя из допускаемой погрешности 2, которая удовлетворяет равенству где- полная случайная инструментальная погрешность однократного измерения интервала времени. В частности, в предлагаемом способе периоды колебаний Тср 1 и Тср 2 физического маятника измеряют при одинаковой амплитуде колебаний. Измерение в режиме автоколебаний устраняет влияние как самого трения, так и характера зависимости трения от скорости колебаний на результат измерений, поскольку при автоколебаниях потери энергии маятника на трение полностью компенсируются за счет энергии внешнего источника, независимо от характера трения. 4 11135 1 2008.10.30 В данном режиме время колебаний маятника становится практически неограниченным. За счет выбора 1 и 2 может быть устранено влияние как относительно быстрых,так и относительно медленных флуктуаций и дрейфов на средние значения периодов колебаний. Как следует из формулы (6) это позволяет получить значение 2 с любой наперед заданной погрешностью. Понятие полная случайная инструментальная погрешность Т, входящая в (8), включает в себя как основную, так и дополнительные погрешности, обусловленные влиянием изменения нестабильности окружающей среды и параметров конструкции гравиметра. В прототипе эти факторы рассматривались лишь в виде поправок к основной погрешности,обусловленной погрешностью регистратора. При этом отсутствовала возможность учета взаимодействия этих погрешностей. В предлагаемом способе такая возможность имеется. Измерение периодов Тср 1 и Тср 2 при одинаковой амплитуде обеспечивает постоянство методической погрешности измерений, обусловленной зависимостью периода от амплитуды. В этом случае отпадает сама необходимость вычисления поправки за амплитуду. В данном режиме также отпадает необходимость проводить измерения при малых амплитудах колебаний. На чертеже показана схема управления маятниковым гравиметром, реализующая предлагаемый способ измерений. Здесь 1 - физический маятник с опорой качения, включающий опору в виде ребра призмы 2, которая опирается на неподвижную плоскую поверхность, серьгу - 3, груз - 4,постоянный магнит 5, прикрепленный к грузу 4, зеркало - 6, прикрепленное к серьге 3,электромагнит -7, фотоприемники - 8 и 9, лазер - 10, частотомер-хронометр - 11, блок управления - 12, цепь управления 13, луч 14 лазера, отраженный от зеркала 6 при его двух различных положениях зеркала. Лазер 10, зеркало 6, фотоприемник 9, блок управления 11, постоянный магнит 5 и электромагнит 7 образуют систему, обеспечивающую мягкий режим возбуждения автоколебаний маятника 1, в котором автоколебания маятника с заданной амплитудой возникают и поддерживаются без внешнего толчка. Амплитуда колебаний маятника задается положением фотоприемника 9. Данная система работает следующим образом. При колебаниях маятника, если луч 14 лазера, отраженный от зеркала 6, не попадает во входное окно фотоприемника 9, блок управления 11 через цепь 13 включает электромагнит 7, который притягивает маятник с помощью магнита 5 всякий раз, когда маятник подходит к положению равновесия. В случае, когда этот же луч пересекает входное окно фотоприемника 9, блок управления 11 включает электромагнит 7, который притягивает маятник всякий раз, когда маятник отходит от положения равновесия. Таким образом, поддерживается заданная амплитуда колебаний маятника. Фотоприемник 8 установлен в таком положении, при котором луч 14 лазера 10, отраженный от зеркала 6, попадает в его входное окно лишь тогда, когда маятник находится в положении равновесия. Частотомер - хронометр 11 вместе с лазером 10, зеркалом 6 и фотоприемником 8 образуют систему измерения времени колебаний маятника 1. Частотомер запускается при первом прохождении лучом 14 и останавливается после заданного числа прохождений этим лучом положения равновесия маятника, которое фиксируется фотоприемником 8. Предлагаемый способ реализуют следующим образом. 1. Задают априори значения 1 и 2, исходя из формулы (8) и заданных значений погрешности 2 и полной инструментальной случайной погрешности , а также условий 12 и 2. В частности, можно считать, что 12. Тогда 1 2. 11135 1 2008.10.30 2. Проводят измерения Тср 1 на исходном пункте с известным значением ускорения свободного падения, равным 1. Дляэтого включают блок управления 11. После того как маятник входит в режим автоколебаний с заданной амплитудой колебаний, измеряют время 1 полного числапериодов колебаний и вычисляют среднее значение периода по формуле 3. Проводят измерения 2 в пункте с неизвестным значением ускорения свободного падения 2. Для этого включают блок управления 11. После того как маятник входит в режим автоколебаний с той же амплитудой колебаний, как и в первом случае, измеряют время 2 полного числапериодов колебаний и вычисляют среднее значение периода по формуле 4. Вычисляют значение ускорения свободного падения 2 по формуле (1), которая в данном случае принимает вид 2211 2 .(12) 1 Источники информации 1. Юзефович А.П., Огородова Л.В. Гравиметрия. - М. Недра, 1980. - 320 с. 2. Джилавдари И.З. Влияние трения на точность маятникового гравиметра Материалы Международной научно-практической конференции Метрологическое обеспечение качества - 2000. - Минск, 2000. 3. Торге В. Гравиметрия. - М. МИР, 1999. - 429 с. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 6
МПК / Метки
МПК: G01V 7/00
Метки: падения, ускорения, свободного, измерения, способ
Код ссылки
<a href="https://by.patents.su/6-11135-sposob-izmereniya-uskoreniya-svobodnogo-padeniya.html" rel="bookmark" title="База патентов Беларуси">Способ измерения ускорения свободного падения</a>
Способ измерения ускорения свободного падения
Номер патента: 6758
Опубликовано: 30.03.2005
Автор: Джилавдари Игорь Захарович
МПК: G01V 7/00
Метки: способ, свободного, измерения, ускорения, падения
Текст:
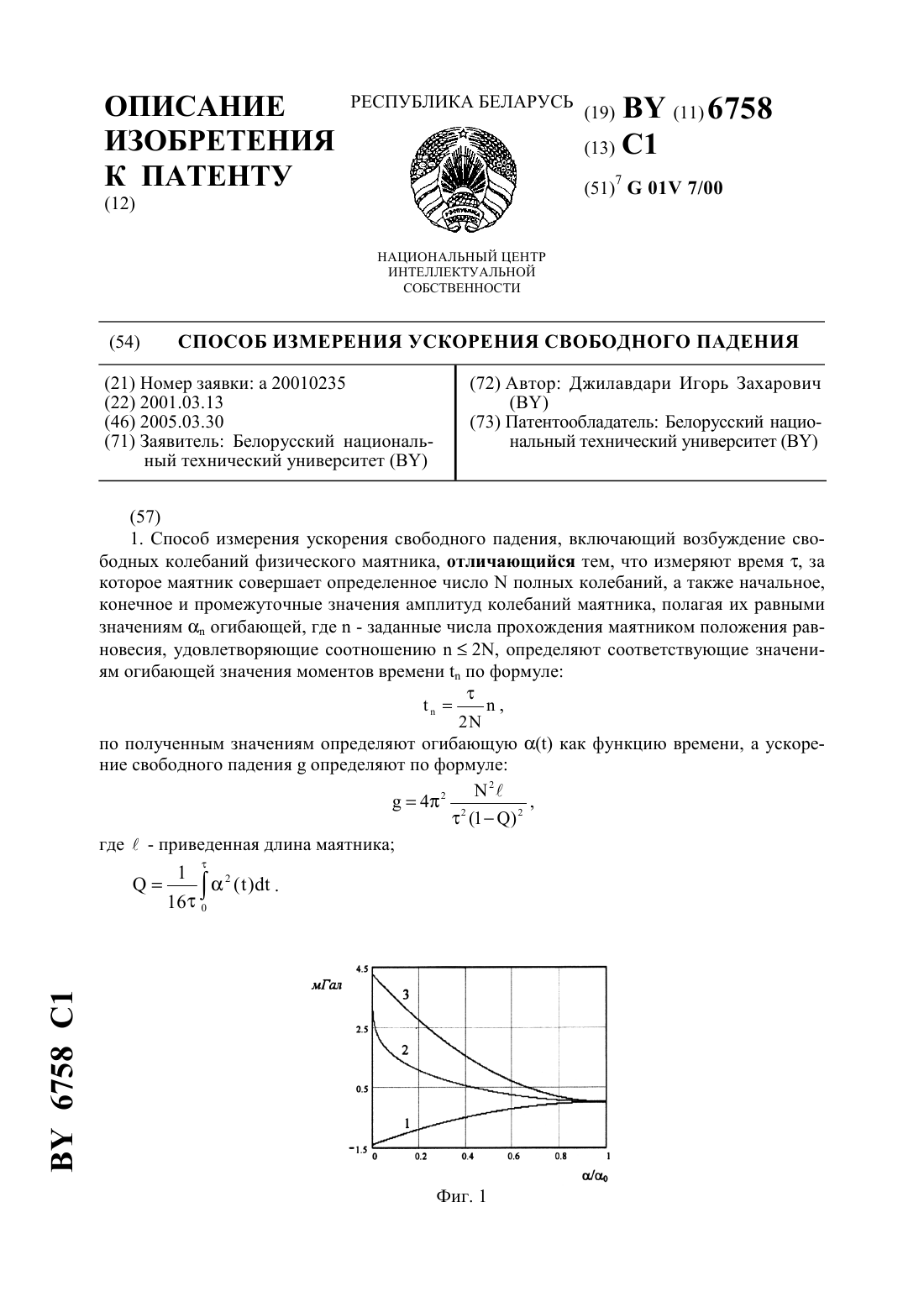
...амплитуды и не зависит от коэффициента трения. Здесь представлены случаи действия кулонова трения (тр в (17) не зависит от величины угловой скорости маятника) - кривая 1, случай действия линейного трения (Мтр в (17) пропорционален угловой скорости маятника) - кривая 2 и случай действия квадратичного трения(Мтр в (17) пропорционален квадрату угловой скорости маятника) - кривая 3. Из фиг. 1 видно, что указанная разность может существенно...
Способ измерения приведенного периода свободных колебаний маятника
Номер патента: 7056
Опубликовано: 30.06.2005
Автор: Джилавдари Игорь Захарович
МПК: G01V 7/00
Метки: способ, колебаний, приведенного, свободных, периода, измерения, маятника
Текст:
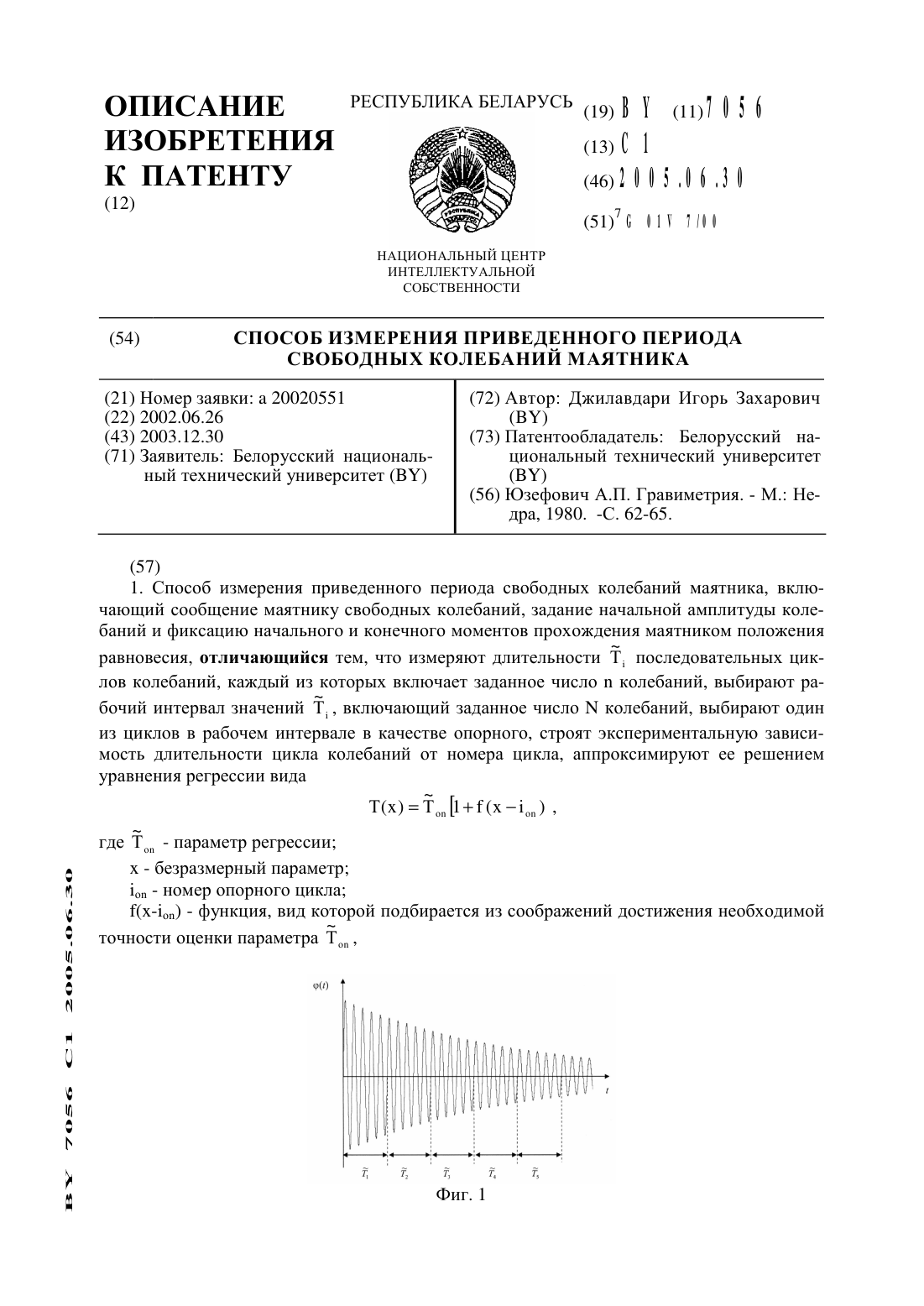
...маятника, измеренного в некотором интервале конечных значений амплитуд ос (в прототипе ос 30-40 угл. минут), к значению периода при ос О, т.е. к значению, где зависимость Т(ос) не известна и не может быть измерена. Теория этого способа и расчетные формулы построены на модели идеального физического маятника, далекой от реальной модели.Задачей изобретения является увеличение точности измерений приведенного периода свободных колебаний...
Способ измерения твердости
Номер патента: 8093
Опубликовано: 30.06.2006
Автор: Джилавдари Игорь Захарович
МПК: G01N 3/40
Метки: измерения, способ, твердости
Текст:
...влияние такого случайного фактора, как текущее значение амплитуды. 8093 1 2006.06.30 Использование метода наименьших квадратов является стандартной процедурой обработки экспериментальных результатов. На фиг. 1 показана деформация исследуемого тела под действием веса маятника, опирающегося шариком на поверхность этого тела. На фиг. 2 представлен график зависимости длительности цикла колебаний маятника от номера цикла в заданном интервале...
Чувствительный элемент маятникового гравиметра
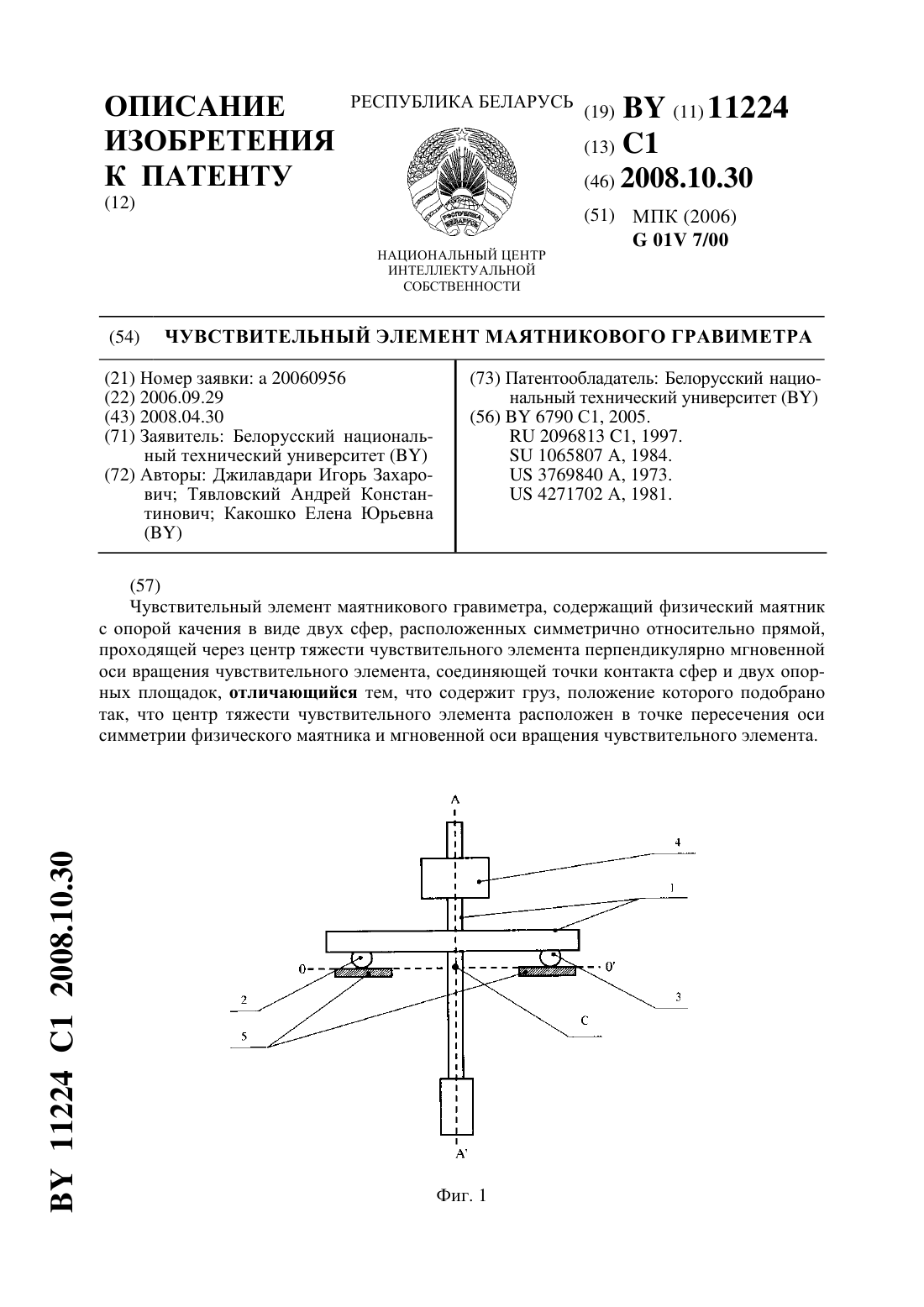
Номер патента: 11224
Опубликовано: 30.10.2008
Авторы: Джилавдари Игорь Захарович, Какошко Елена Юрьевна, Тявловский Андрей Константинович
МПК: G01V 7/00
Метки: чувствительный, гравиметра, элемент, маятникового
Текст:
...чувствительный элемент маятникового гравиметра, содержащий физический маятник с опорой качения в виде двух сфер, расположенных симметрично относительно прямой, проходящей через центр тяжести чувствительного элемента перпендикулярно мгновенной оси вращения чувствительного элемента,соединяющей точки контакта сфер и двух опорных площадок, содержит груз, положение которого подобрано так, что центр тяжести чувствительного элемента расположен в...
Способ идентификации тканевой принадлежности свободного фрагмента в пределах фаланг и анатомических областей кисти
Номер патента: 3911
Опубликовано: 30.06.2001
Автор: Мелешевич Алексей Владимирович
МПК: A61B 5/117
Метки: способ, фрагмента, принадлежности, пределах, свободного, кисти, анатомических, тканевой, идентификации, областей, фаланг
Текст:
...интегрированной величины жировой дольки свободного фрагмента с подобной величиной жировой дольки предполагаемого места отрыва подкожной клетчатки. Предложение основывается на данных морфометрических исследований подкожной клетчатки 21 кисти двадцати одного нефиксированного трупа в возрасте от 23 до 67 лет со сроком давности смерти от 6 до 48 часов. В результате морфометрических исследований установлено, что жировые дольки фаланг и...
Предыдущий патент: Чувствительный элемент маятникового гравиметра
Следующий патент: Способ получения пористого проницаемого материала
Случайный патент: Устройство для сбора измельченного материала