Способ измерения ускорения свободного падения
Текст
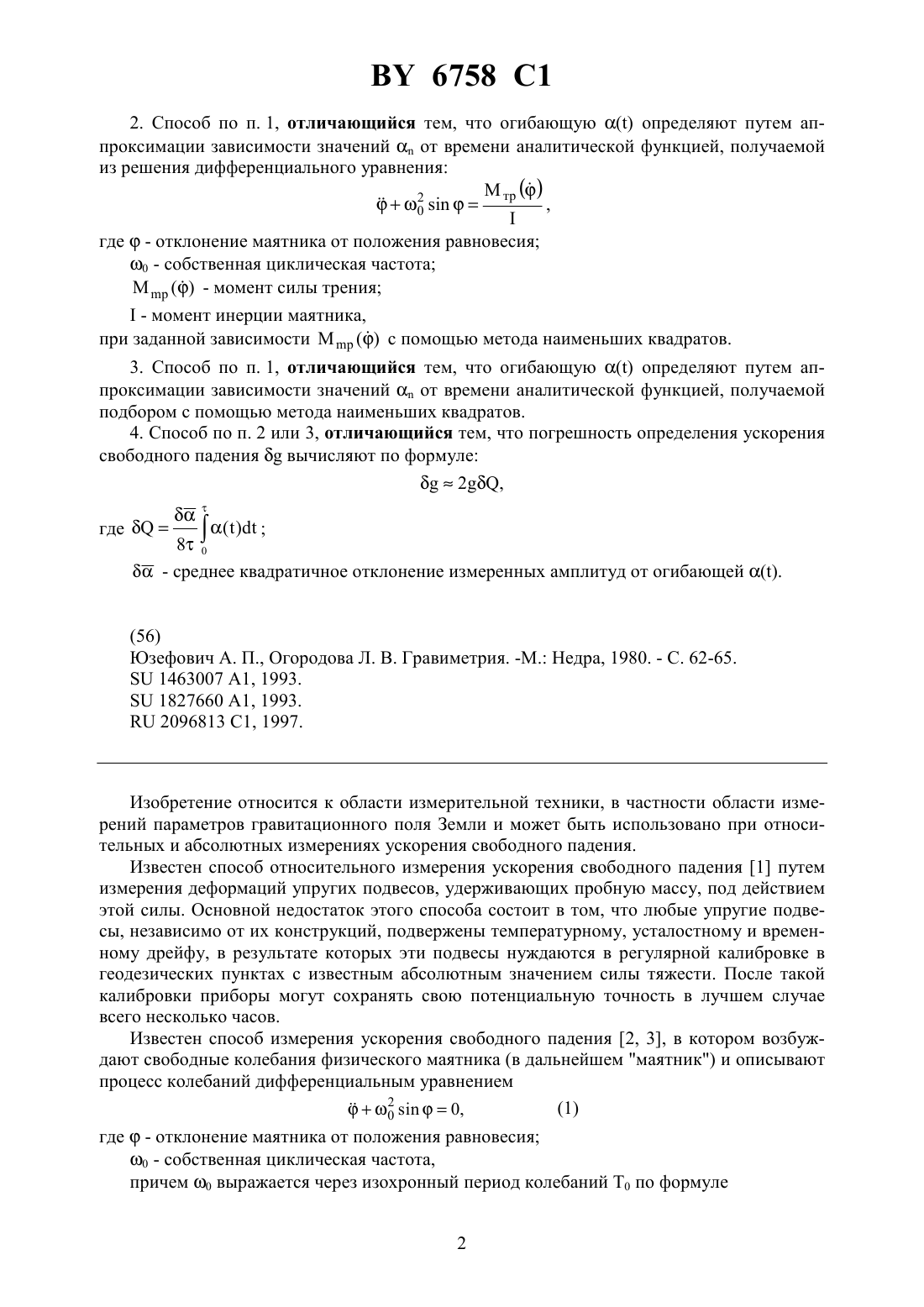
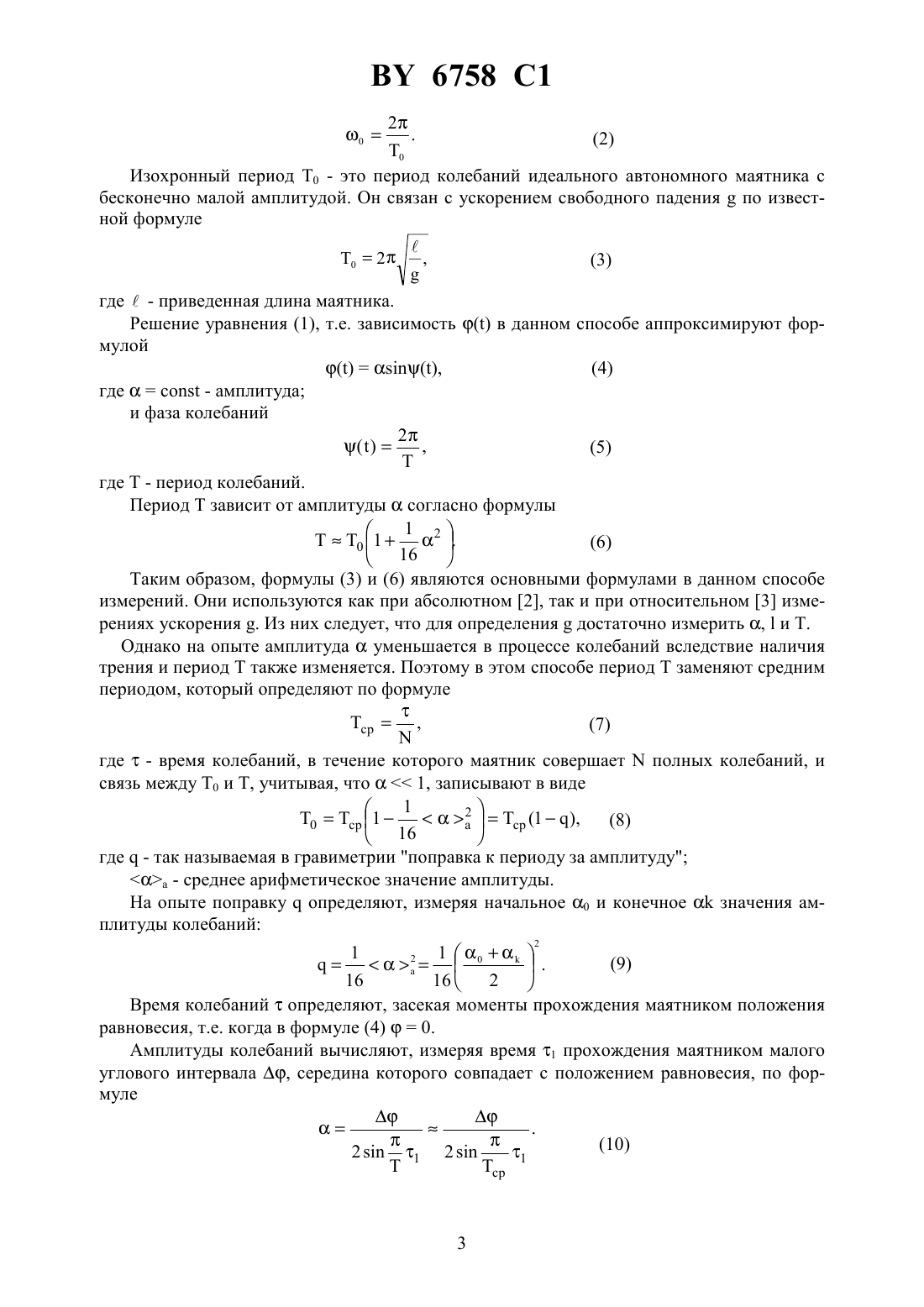
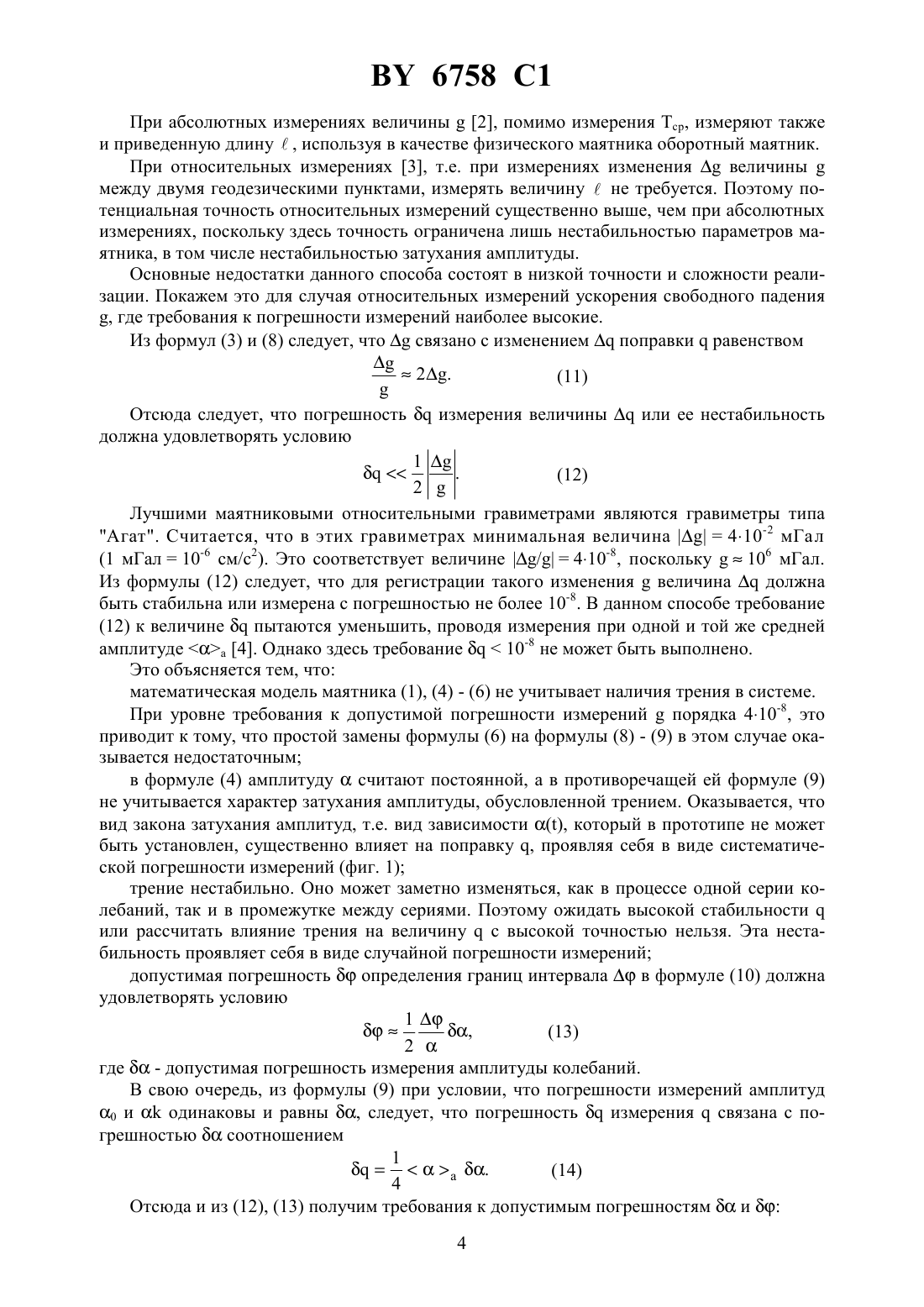
(12) НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ(71) Заявитель Белорусский национальный технический университет(72) Автор Джилавдари Игорь Захарович(73) Патентообладатель Белорусский национальный технический университет(57) 1. Способ измерения ускорения свободного падения, включающий возбуждение свободных колебаний физического маятника, отличающийся тем, что измеряют время , за которое маятник совершает определенное числополных колебаний, а также начальное,конечное и промежуточные значения амплитуд колебаний маятника, полагая их равными значениямогибающей, где- заданные числа прохождения маятником положения равновесия, удовлетворяющие соотношению 2, определяют соответствующие значениям огибающей значения моментов временипо формуле,2 по полученным значениям определяют огибающуюкак функцию времени, а ускорение свободного паденияопределяют по формуле 2 24 2 6758 1 2. Способ по п. 1, отличающийся тем, что огибающуюопределяют путем аппроксимации зависимости значенийот времени аналитической функцией, получаемой из решения дифференциального уравнения, где- отклонение маятника от положения равновесия 0 - собственная циклическая частота р- момент силы трения- момент инерции маятника, при заданной зависимостирс помощью метода наименьших квадратов. 3. Способ по п. 1, отличающийся тем, что огибающуюопределяют путем аппроксимации зависимости значенийот времени аналитической функцией, получаемой подбором с помощью метода наименьших квадратов. 4. Способ по п. 2 или 3, отличающийся тем, что погрешность определения ускорения свободного падениявычисляют по формуле 2,8 0- среднее квадратичное отклонение измеренных амплитуд от огибающей . Изобретение относится к области измерительной техники, в частности области измерений параметров гравитационного поля Земли и может быть использовано при относительных и абсолютных измерениях ускорения свободного падения. Известен способ относительного измерения ускорения свободного падения 1 путем измерения деформаций упругих подвесов, удерживающих пробную массу, под действием этой силы. Основной недостаток этого способа состоит в том, что любые упругие подвесы, независимо от их конструкций, подвержены температурному, усталостному и временному дрейфу, в результате которых эти подвесы нуждаются в регулярной калибровке в геодезических пунктах с известным абсолютным значением силы тяжести. После такой калибровки приборы могут сохранять свою потенциальную точность в лучшем случае всего несколько часов. Известен способ измерения ускорения свободного падения 2, 3, в котором возбуждают свободные колебания физического маятника (в дальнейшем маятник) и описывают процесс колебаний дифференциальным уравнением 2(1)00,где- отклонение маятника от положения равновесия 0 - собственная циклическая частота,причем 0 выражается через изохронный период колебаний 0 по формуле 2(2) 0 Изохронный период 0 - это период колебаний идеального автономного маятника с бесконечно малой амплитудой. Он связан с ускорением свободного паденияпо известной формуле где- приведенная длина маятника. Решение уравнения (1), т.е. зависимостьв данном способе аппроксимируют формулой где- период колебаний. Периодзависит от амплитудысогласно формулы 1(6)16 Таким образом, формулы (3) и (6) являются основными формулами в данном способе измерений. Они используются как при абсолютном 2, так и при относительном 3 измерениях ускорения . Из них следует, что для определениядостаточно измерить ,и . Однако на опыте амплитудауменьшается в процессе колебаний вследствие наличия трения и периодтакже изменяется. Поэтому в этом способе периодзаменяют средним периодом, который определяют по формуле где- время колебаний, в течение которого маятник совершаетполных колебаний, и связь между 0 и , учитывая, что 1, записывают в виде 1 где- так называемая в гравиметрии поправка к периоду за амплитуду- среднее арифметическое значение амплитуды. На опыте поправкуопределяют, измеряя начальное 0 и конечноезначения амплитуды колебаний 0(9)0. 16 162 Время колебанийопределяют, засекая моменты прохождения маятником положения равновесия, т.е. когда в формуле (4)0. Амплитуды колебаний вычисляют, измеряя время 1 прохождения маятником малого углового интервала , середина которого совпадает с положением равновесия, по формуле 6758 1 При абсолютных измерениях величины 2, помимо измерения ср, измеряют также и приведенную длину, используя в качестве физического маятника оборотный маятник. При относительных измерениях 3, т.е. при измерениях изменениявеличинымежду двумя геодезическими пунктами, измерять величинуне требуется. Поэтому потенциальная точность относительных измерений существенно выше, чем при абсолютных измерениях, поскольку здесь точность ограничена лишь нестабильностью параметров маятника, в том числе нестабильностью затухания амплитуды. Основные недостатки данного способа состоят в низкой точности и сложности реализации. Покажем это для случая относительных измерений ускорения свободного падения, где требования к погрешности измерений наиболее высокие. Из формул (3) и (8) следует, чтосвязано с изменениемпоправкиравенством Отсюда следует, что погрешностьизмерения величиныили ее нестабильность должна удовлетворять условию 1(12) 2 Лучшими маятниковыми относительными гравиметрами являются гравиметры типа Агат. Считается, что в этих гравиметрах минимальная величина 410 -2 мГал(1 мГал 10-6 см/с 2). Это соответствует величине /410-8, поскольку 106 мГал. Из формулы (12) следует, что для регистрации такого изменениявеличинадолжна быть стабильна или измерена с погрешностью не более 10-8. В данном способе требование(12) к величинепытаются уменьшить, проводя измерения при одной и той же средней амплитуде а 4. Однако здесь требование 10-8 не может быть выполнено. Это объясняется тем, что математическая модель маятника (1), (4) - (6) не учитывает наличия трения в системе. При уровне требования к допустимой погрешности измеренийпорядка 410-8, это приводит к тому, что простой замены формулы (6) на формулы (8) - (9) в этом случае оказывается недостаточным в формуле (4) амплитудусчитают постоянной, а в противоречащей ей формуле (9) не учитывается характер затухания амплитуды, обусловленной трением. Оказывается, что вид закона затухания амплитуд, т.е. вид зависимости , который в прототипе не может быть установлен, существенно влияет на поправку , проявляя себя в виде систематической погрешности измерений (фиг. 1) трение нестабильно. Оно может заметно изменяться, как в процессе одной серии колебаний, так и в промежутке между сериями. Поэтому ожидать высокой стабильностиили рассчитать влияние трения на величинус высокой точностью нельзя. Эта нестабильность проявляет себя в виде случайной погрешности измерений допустимая погрешностьопределения границ интервалав формуле (10) должна удовлетворять условию 1,(13) 2 где- допустимая погрешность измерения амплитуды колебаний. В свою очередь, из формулы (9) при условии, что погрешности измерений амплитуд 0 иодинаковы и равны , следует, что погрешностьизмерениясвязана с погрешностьюсоотношением 1. Для облегчения требований (15) и (16) в данном способе приходится существенно ог раничивать начальное отклонение маятника 0. В частности, при 108 (стандартное требование для современных относительных маятниковых гравиметров) из (15) найдем,что даже при 1 угл. град.0,018 радиан, погрешность 0,46 угл. с. В свою очередь, из (16) при 0,5 имеем 0,23 угл. с. Реально оба требования выполнить очень сложно. Влияние трения в данном способе пытаются устранить особым устройством опоры маятника, вакуумированием пространства, в котором качается маятник, и проведением измерений при малых, менее одного градуса, амплитудах колебаний. Это также усложняет реализацию способа. Однако даже такие меры оказываются не достаточными для компенсации зависимости периода Т от амплитуды 4. Задачей изобретения является увеличение точности и упрощение реализации маятникового способа измерений. Решение этой задачи обеспечивается тем, что в известном способе измерения ускорения свободного падения, включающем возбуждение свободных колебаний физического маятника, измеряют время , за которое маятник совершает определенное числополных колебаний, а также начальное, конечное и промежуточные значения амплитуд колебаний маятника, полагая их равными значениямогибающей, где- заданные числа прохождения маятником положения равновесия, удовлетворяющие соотношению 2, определяют соответствующие значениям огибающей значения моментов временипо формуле,2 и по полученным значениям определяют огибающуюкак функцию времени, а ускорение свободного падения определяют по формуле 24 2 В частности, в предлагаемом способе огибающуюопределяют путем аппроксимации зависимости измеренных значенийот времени аналитической функцией, получаемой из решения дифференциального уравнения где- отклонение маятника от положения равновесия 0 - собственная циклическая частота М - момент силы трения- момент инерции маятника. 5 6758 1 В частности, в предлагаемом способе огибающуюопределяют путем аппроксимации зависимости измеренных значенийот времени аналитической функцией, получаемой подбором, с помощью метода наименьших квадратов. В предлагаемом способе погрешность определения ускорения свободного падениявычисляют по формуле 2,где 8 0- среднее квадратичное отклонение измеренных амплитуд от огибающей . Измерение значений огибающей колебаний и вычисление соответствующих им моментов времени позволяют определить вид функциив каждом проводящемся опыте и даже в реальном времени. В прототипе эта функция не может быть определена. В свою очередь, это позволяет вычислить поправкук конечному значению фазы колебаний и,как следствие, существенно повысить точность вычисления ускорения свободного падения, посколькутакже является и поправкой к искомой величине ускорения . Это нашло свое отражение в формуле (21). Эта формула вытекает из математической модели (17)(19) предлагаемого способа. В принципе, математическая модель (17)-(19) хорошо известна в теории колебаний. Поэтому она и приведена в ограничительной части сущности изобретения. Однако строгий анализ ее и применение вытекающих из него выводов в проблеме измерений ускорения свободного падения с высокой точностью до сих пор не проводились. Отметим также, что при наличии трения из формулы (10) определяются не амплитуды колебаний, а именно значения огибающей в моменты прохождения маятником положения равновесия. Это различие незначительно при малом трении, но должно учитываться при относительно большом трении. Использование формулы (20) для вычисления моментов времениделает эту процедуру весьма простой. Эта возможность появляется благодаря тому, что, как ниже будет показано, в предлагаемом способе нет необходимости прибегать к такому понятию как период колебаний, а точности определения значений огибающейв эти моменты оказывается достаточной. Значения чиселв предлагаемом способе задают до опыта, например, 0 5 10 Полное число значений огибающей, которое может быть измерено в предлагаемом способе, равно числу прохождений маятником положения равновесия. Если- число фиксируемых полных колебаний, то число прохождений положения равновесия равно 2. В данном способе можно измерять не все значения огибающей, а лишь их определенное число 2, где. Например, можно измерять каждое десятое значение огибающей, соответствующее каждому десятому прохождению маятником положения равновесия. Поэтому здесь 2. Числовыбирают из соображений достижения необходимой точности вычисления поправки . В отличие от прототипа, поправка- это поправка за амплитуду не к среднему периоду, а к конечной фазе колебаний. Ниже будет показано, что необходимость введения именно этой поправки обусловлено самой процедурой измерения. Аналитический вид поправкизависит от того, с какой точностью решают дифференциальное уравнение (17). В частном случае, когда решение ищут в первом приближении асимптотической теории нелинейных колебаний (наиболее точной теории из существующих), т.е. в виде (19), поправка дается формулой (22). Она достаточно просто и однозначно вытекает из этого решения. Это будет показано ниже. Из формулы (22) явно следует, что поправказависит от вида функции . Данная особенность позволяет правильно учесть влияние характера трения и исключить систематическую погрешность измерений, связанную с этим трением. Кроме того, это же позволяет 6 6758 1 исключить случайные погрешности измерений, связанные с изменением трения в маятнике в каждой серии колебаний и между этими сериями, т.к. всякое изменение трения отражается на функции . Сказанное иллюстрируется на фиг. 1. Здесь представлена зависимость разности - от конечной амплитуды колебаний маятника, выраженная в мГал и вычисленная при начальной амплитуде 040 угл. мин. Такую начальную амплитуду реализуют в гравиметрах Агат. В рассмотренных ниже случаях эта разность может быть вычислена аналитически. Она зависит только от значения амплитуды и не зависит от коэффициента трения. Здесь представлены случаи действия кулонова трения (тр в (17) не зависит от величины угловой скорости маятника) - кривая 1, случай действия линейного трения (Мтр в (17) пропорционален угловой скорости маятника) - кривая 2 и случай действия квадратичного трения(Мтр в (17) пропорционален квадрату угловой скорости маятника) - кривая 3. Из фиг. 1 видно, что указанная разность может существенно превышать расчетную погрешность,равную 0,01 мГал. Возможность учета влияния характера трения в величинепозволяет также существенно упростить реализацию предлагаемого способа измерений, поскольку открывает возможность проводить измерения без вакуумирования рабочего объема прибора. Дополнительно это же позволяет исключить наличие вибраций основания в той степени, в какой эти вибрации влияют на характер затухания колебаний маятника. Измерение дополнительных значений огибающей в предлагаемом способе позволяет существенно облегчить требование к погрешности подобных измерений по сравнению с прототипом. Ниже будет показано, что это требование имеет вид где- число измеренных значений огибающей- число степеней свободы статистического ансамбля, образованного этими значениями (обычно 3). Если 1, то, сравнив эту формулу с формулами (13) и (15), увидим, что требования ки коблегчаются, примерно, в 2 раз. При измерениях, маятник может совершать несколько тысяч полных колебаний. Если измерять значения огибающей при каждом прохождении положения равновесия, т.е. дважды за один период, то при 1000 имеем 2000 и 290 . Такое уменьшение требований кипозволяет существенно упростить реализацию предлагаемого способа по сравнению с прототипом. В предлагаемом способе на основании измеренных значений огибающей вид огибающейможет быть определен несколькими стандартными способами. Например, можно предложить два метода аппроксимации зависимости измеренных значений аналитической функцией. В первом методе исходят из соображений физической реальности, т.е. решают нелинейное дифференциальное уравнение (17) при заданной зависимости Мр . Второй метод более простой можно выбрать гладкую монотонно убывающую аналитическую функцию, которая достаточно хорошо проходит между измеренными значениями. В обоих методах используется стандартная процедура метода наименьших квадратов. Примеры реализации обоих методов приведены ниже. Существует и третий метод определения огибающей - численный. Это метод сплайнаппроксимации. Реализация этого метода с использованием современных компьютерных программ не встречает трудностей. Однако он менее точен, чем предыдущие. Формула (23) для вычисления погрешностипоправки к фазе является следствием формулы (22). Вычислениепозволяет выбрать оптимальное число измеряемых амплитуди допустимое значение погрешностиих измерения. 7 6758 1 Докажем справедливость формулы (22). Для этого необходимо рассмотреть процедуру решения дифференциального уравнения (17). Из асимптотической теории решения нелинейных дифференциальных уравнений следует, что в первом приближении этой теории процесс затухающих колебаний физического маятника описывается формулой (19), причем в этом случае фаза колебаний определяется из уравнения 0(1-),где- дается формулой (22). Таким образом, формула (22) доказана. Докажем теперь справедливость формулы (21). На опыте измерение времени колебаний и в способе - прототипе, и в предлагаемом способе осуществляют путем включения таймера в момент прохождения маятником положения равновесия и последующего его выключения также в этот момент через определенное числоколебаний. Как это следует из (19), в момент включения таймера фаза 0, в момент выключения (27) 2. Следовательно, в обоих способах имеют дело не с периодом колебаний, а именно с фазой колебаний. Формула (21) следует из формул (18), (26) и (27). Обратим внимание на то, что, как легко видно, при последовательном анализе математической модели предлагаемого способа измерений мы нигде не имеем дело с понятием период колебаний. Если ввести средний период по формуле, то из формул (2), (26) и (27) полу чим равенство 0(1-),(28) которое по виду совпадает с равенством (8), используемым в способе-прототипе. Однако здесь есть принципиальное различие. Если в (8) поправка к периодупропорциональна квадрату среднего арифметического значения амплитуды ( а а)2 (см. формулу (9, то в предлагаемом способе аналогичная поправкапропорциональна среднему от квадрата амплитудыа 2(см. формулу (22. Ниже показано, что результаты расчетов по этим формулам могут существенно различаться, причем это различие тем больше, чем больше затухание колебаний маятника. Из формулы (21), учитывая, что 1, с помощью стандартной процедуры, включающей логарифмирование и последующее дифференцирование, получим связь погрешностиизмеренияс погрешностьюопределения поправки В случае относительных измеренийпогрешностьдолжна быть существенно меньше изменения , определяемого в процессе измерений. Следовательно, должно выполняться условие Обратим внимание на то, что- это функционал величиназависит от вида кривой зависимости , соединяющей начальную и конечную амплитуды на виброграмме. Вследствие погрешностей измерений и воздействия случайных внешних факторов, промежуточные экспериментальные точки (т.е. измеренные значения огибающей), как правило,не могут лежать на одной монотонной кривой. Поэтому, если не вводить каких - либо ог 8 6758 1 раничений, аппроксимирующих кривых среди этих точек можно провести сколь угодно много. Поэтому под погрешностьюследует понимать среднее квадратическое отклонение значенийпри переходе от выбранной аппроксимирующей кривой ко всем возможным другим кривым. Используя правило дифференцирования функционалов и обобщенную теорему о среднем значении для произведения двух функций, из (22) найдем где - произвольная огибающая, которой можно связать начальную и конечную точки кривойи отличная от этой кривой- среднее значение отклонений различных огибающих от кривой- среднее значение огибающей. Следовательно, формула (23) доказана. Отсюда и из (30) получим Значениеопределим, как это обычно делают для случайных величин, средним квадратическим отклонением измеряемых на опыте значений огибающейотносительно кривой где-число всех измеренных значений огибающей- число степеней свободы статистического распределения (в нашем случае число параметров кривой (- измеряемые на опыте значения огибающей- значения аппроксимирующей функции в моменты времени прохождения маятником положения равновесия. Величинугрубо можно оценить также по очевидной формуле 2 1(34) 2 2(1) ,16 в которой операция суммирования заменяет операцию интегрирования в (31). Теперь получим формулу (13). Из (19) следует, что вблизи положения равновесия маятник проходит малый угловой интервалза малое время 1(011), определяемое равенством(35)0101. Отсюда найдем связь между погрешностьюв определении границ интервалаи погрешностьюв определении текущего значения огибающей Получим теперь соотношение (24). Будем считать, что в (33) разности- , которые обусловлены погрешностью измерения значений огибающей, по модулю примерно одинаковы и равны . Тогда из (33) следует 9(37)1 Подставляя (37) в (32), получим искомое требование (24). Приведем пример определения огибающей для случая, когда задана зависимость где,т.е. будем считать, что трение содержит кулонову, линейную и квадратичную составляющие. Следует отметить, что функция (38) имеет вид более общий по сравнению с теми функциями, которые рассматриваются в работах по теории колебаний. В этих работах рассматриваются лишь частные случаи, которые следуют из (38). Можно показать, что в первом приближении асимптотической теории нелинейных колебаний из (38), (17) и (19) следует, что функцияимеет вид 2 01(42)3 2 Именно коэффициентыопределяются из опыта на основании измерений значений огибающей. По формулам (39)-(42), пользуясь методом численной нелинейной аппроксимации,например имеющимся в широко известной компьютерной программе , можно легко определить коэффициентыи тем самым определить вид огибающейв каждом случае колебаний маятника. Рассмотрим теперь второй метод определения огибающей- путем подбора аналитической функции. С этой целью можно использовать известную компьютерную программу, содержащую более 8000 аналитических функций, с помощью которых можно совершить процедуру аппроксимации опытных данных. Для этого достаточно ввести в программу значения измеренные значения огибающей и соответствующие им моменты времени. Программа выстроит все свои аналитические функции в соответствии с достигаемой точностью аппроксимации, и останется лишь выбрать наиболее подходящую из них. Реализация этого метода представлена ниже (формула (42. На фиг. 1 представлена зависимость от амплитуды колебаний разности -, вычисленной при значении начальной амплитуды 040 угл. мин.фиг. 2 в виде отдельных кружков представлены результаты измерений значений огибающей для реального маятника и соответствующие моменты времени. В виде непрерывной линии здесь же показана огибающая, полученная в результате аппроксимации методом наименьших квадратов на основании формулы (40). 6758 1 На фиг. 3 показан разброс измеренных значений огибающей относительно кривой . На фиг. 1 кривая 1 относится к случаю, когда на маятник действует кулоново трение,кривая 2 - к случаю действия линейного трения, кривая 3 - случаю действия квадратичного трения. На фиг. 2 и фиг. 3 по оси ординат отложены значения углов, выраженные в радианах,по оси абсцисс отложено время колебаний в секундах. Приведем пример реализации предлагаемого способа на опыте. В нашем распоряжении имелся маятник, который мог совершать свободные колебания без вакуумирования и использования каких-либо способов изоляции его от вибраций основания. Маятник подсвечивался лучом лазера, который отражался от закрепленного на нем зеркальца. В процессе колебаний измерялись амплитуды колебаний, которые при малом трении мало отличаются от значений огибающей. Эти амплитуды определялись визуально на неподвижной шкале. Способ осуществляли следующим образом. Отклонив маятник, привели его в состояние свободных колебаний. Включили таймер в момент первого прохождения маятником положения равновесия. В процессе колебаний измерили восемь амплитуд, включая начальную и конечную, и определили соответствующие им моменты времени (таблица). Таймер был выключен в момент прохождения маятником положения равновесия через 7105 полных колебаний. Время, с Значения амплитуд, угл. мин. График этой табличной зависимости, где углы выражены в радианах, представлен на фиг. 2 в виде отдельных точек. Используя формулу (40) и компьютерную программу , рассчитали коэффициенты . Были получены следующие значения 04,89110-7 12,56410-4 21,90310-3. Огибающая , т.е. кривая (40) с этими значениями коэффициентов , показана в виде непрерывной линии на фиг. 2. Вычислили поправкупо формуле (22). При использовании формулы (40) поправка может быть вычислена аналитически. Получили значение 2,273610-5. Если этот результат выразить в мГал (для этого его необходимо умножить на 106), получим 22,736 мГал. Вычислили среднее квадратическое отклонение измеренных амплитуд от огибающей по 5 формуле (33). Эти отклонения показаны на фиг. 3. Было получено значение 5,954410 . Рассчитали погрешностьпо формулам (31) и (33). Выразив в мГал, получили 0,255 мГал (расчет по формуле (34) дал близкое значение 0,220 мГал). Разброс значений измеренных амплитуд относительно огибающей, выраженный в радианах, показан на фиг. 3. Если исходить из формулы (9) для прототипа, получим, что поправка к периоду за амплитуду 28,482 мГал. Следовательно, разность между этими значениями в прототипе и в предлагаемом способе -5,76 мГал. Этот результат представляет собой погрешность поправки к периоду в прототипе. Если сравнить эту погрешность с погрешностьюв предлагаемом способе, найдем, что погрешность прототипа превосходит аналогичную погрешность предлагаемого способа примерно в 22 раза. Такое большое различие в результатах обусловлено тем, что в способе-прототипе не учтено влияние характера затухания амплитуды колебаний на поправку к среднему периоду. В данном примере число измеренных амплитуд 8. Если бы здесь измерялась каждая амплитуда, то было бы 14210. Тогда для погрешности оценкиимели бы 1,0110-4 мГал. Такова потенциальная точность предлагаемого способа при вычислении поправки к периоду за амплитуду для данного маятника. Следовательно, предлагаемый способ позволяет определять поправки за амплитуду для маятниковых измерений,проводящихся без откачки воздуха из рабочих объемов. 11 6758 1 Что касается второго метода определения огибающей - метода подбора аналитической функции, то в рассматриваемом практическом случае с помощью компьютерной программыбыла выбрана следующая функция, содержащая четыре параметра 1,(43) 12 где а 0,036060,00022 с-3,69910-61,24510-8. Здесь 3,25710 4 . Эта величина больше, чем предыдущая, примерно в 5,5 раз. Поэтому имеет смысл использовать предыдущую функцию в качестве аппроксимирующей. Источники информации 1. Юзефович А.П., Огородова Л.В. Гравиметрия. - . Недра, 1980. - Гл. 4. 2. Юзефович А.П., Огородова Л.В. Гравиметрия. - . Недра, 1980. - Гл. 2. 3. Юзефович А.П., Огородова Л.В. Гравиметрия. - . Недра, 1980. - Гл. 3. 4. Юзефович А.П., Огородова Л.В. Гравиметрия. - . Недра, 1980. - С. 65. Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.
МПК / Метки
МПК: G01V 7/00
Метки: ускорения, измерения, свободного, способ, падения
Код ссылки
<a href="https://by.patents.su/12-6758-sposob-izmereniya-uskoreniya-svobodnogo-padeniya.html" rel="bookmark" title="База патентов Беларуси">Способ измерения ускорения свободного падения</a>
Способ получения водного раствора свободного гидроксиламина
Номер патента: 6793
Опубликовано: 30.03.2005
Авторы: МАУЭР Петер, ВАТЦЕНБЕРГЕР Отто, ШТРЕФЕР Экард, ШНАЙДЕР Ханс-Михель, ШЕЛЛИНГ Хайнер
МПК: B01D 3/34, C01B 21/14
Метки: гидроксиламина, способ, раствора, водного, свободного, получения
Текст:
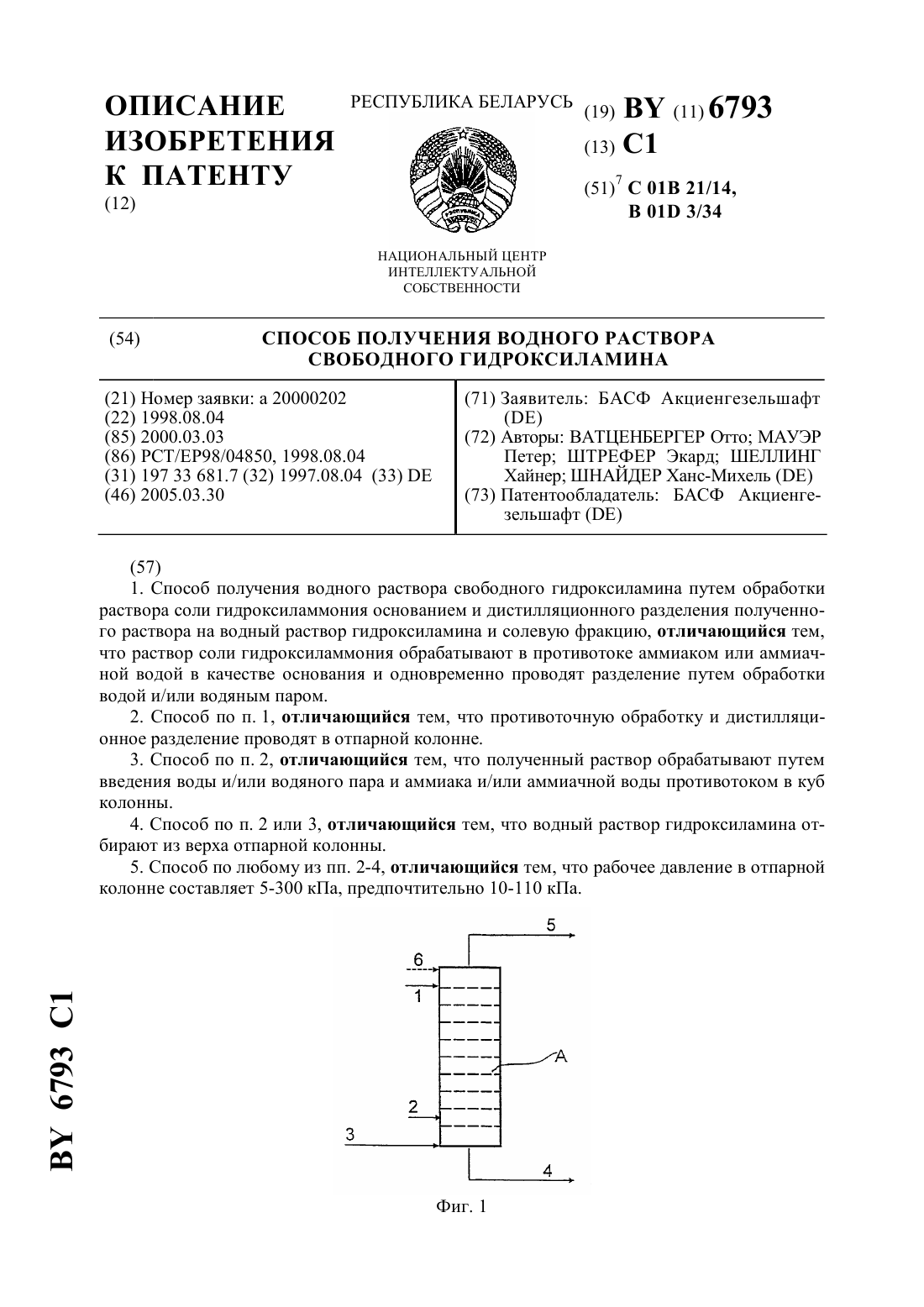
...раствора на водный раствор гидроксиламина и солевую фракцию предпочтительно производится путем обработки в противотоке аммиаком и водяным паром с помощью отпарной колонны (стрипингколонна). Последняя снабжена обычными разделительными тарелками, такими как, например, ситчатые или колпачковые тарелки, или обычной насадкой, например кольцами Рашига, кольцами Паля, седлами, и так далее, и имеет предпочтительно число теоретических тарелок в...
Способ идентификации тканевой принадлежности свободного фрагмента в пределах фаланг и анатомических областей кисти
Номер патента: 3937
Опубликовано: 30.06.2001
Автор: Мелешевич Алексей Владимирович
МПК: A61B 5/117
Метки: принадлежности, областей, пределах, свободного, кисти, идентификации, анатомических, способ, фаланг, тканевой, фрагмента
Текст:
...вес жировой ткани на указательном и среднем пальцах равнялся 5,61,1,безымянном - 9,50,6 . Наиболее высокий удельный вес жировой ткани в составе подкожной клетчатки регистрировался на средней фаланге мизинца - 22,72,6 . На проксимальной фаланге большого пальца на долю жировой ткани приходилось 6,12,9, указательного - 16,93,9, среднего - 10,02,8, безымянного - 9,51,7,мизинца - 11,82,5 . Следовательно, в подкожной клетчатке ладонной...
Способ идентификации тканевой принадлежности свободного фрагмента в пределах фаланг и анатомических областей кисти
Номер патента: 3911
Опубликовано: 30.06.2001
Автор: Мелешевич Алексей Владимирович
МПК: A61B 5/117
Метки: идентификации, фрагмента, областей, фаланг, принадлежности, способ, анатомических, пределах, свободного, кисти, тканевой
Текст:
...интегрированной величины жировой дольки свободного фрагмента с подобной величиной жировой дольки предполагаемого места отрыва подкожной клетчатки. Предложение основывается на данных морфометрических исследований подкожной клетчатки 21 кисти двадцати одного нефиксированного трупа в возрасте от 23 до 67 лет со сроком давности смерти от 6 до 48 часов. В результате морфометрических исследований установлено, что жировые дольки фаланг и...
Способ измерения скорости потока электропроводной жидкости
Номер патента: 4778
Опубликовано: 30.12.2002
Авторы: Цыганов Валерий Анатольевич, Нестеров Анатолий Кузьмич, Рагунович Сергей Петрович, Каспер Юрий Владимирович
МПК: G01P 5/08
Метки: электропроводной, измерения, способ, жидкости, скорости, потока
Текст:
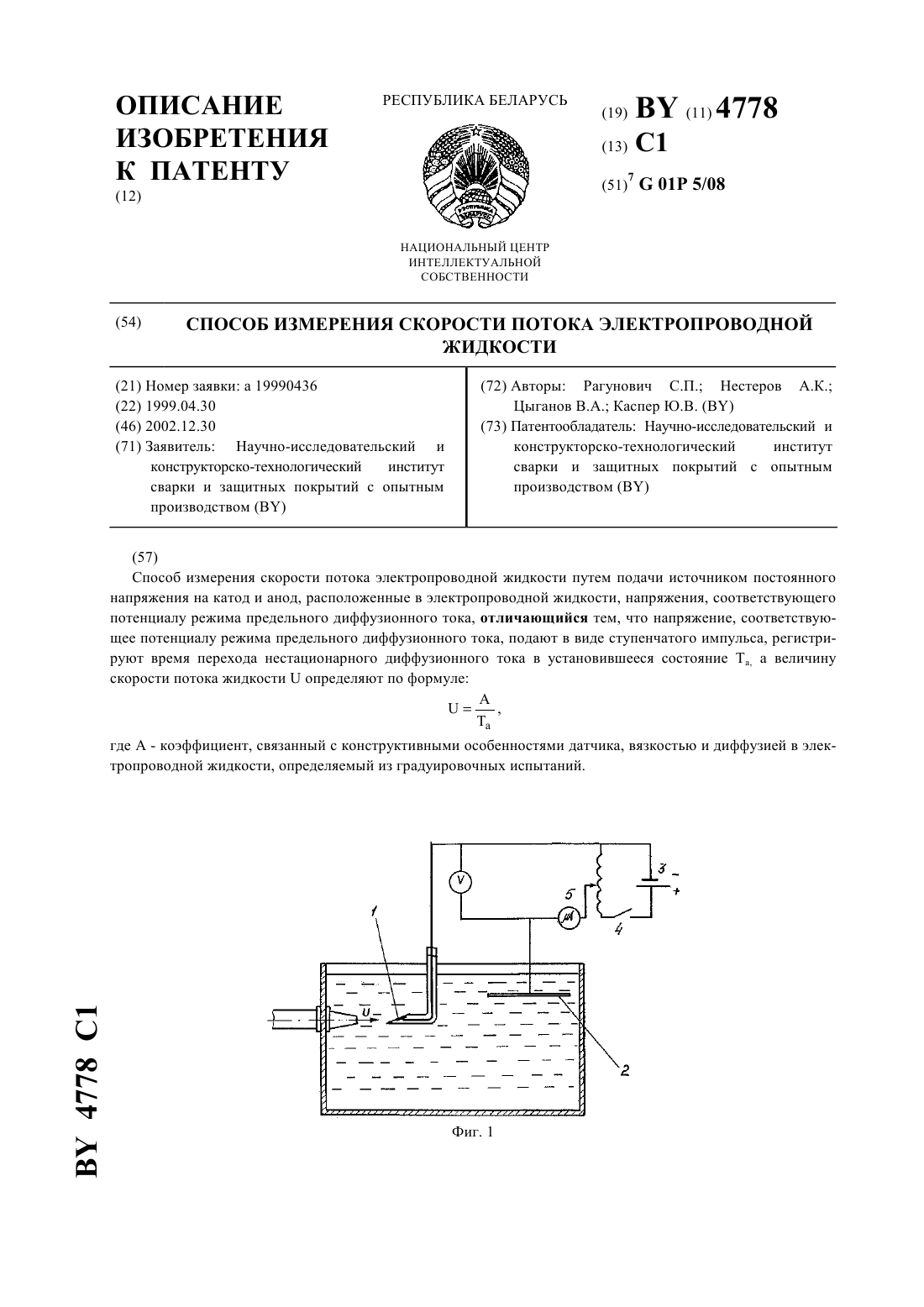
...жидкостей используют электропроводные жидкости, в частности растворы участвующих в окислительно-восстановительных реакциях солей, а именно раствор солей ферро-феррицианитов калия (раствор красной и желтой кровяной солей). Ступенчатый импульс напряжения подают на катод 1 (фиг. 1) и анод 2, присоединенные к источнику напряжения 3, для того, чтобы получить на электродах потенциал предельного диффузионного тока. Потенциал предельного...
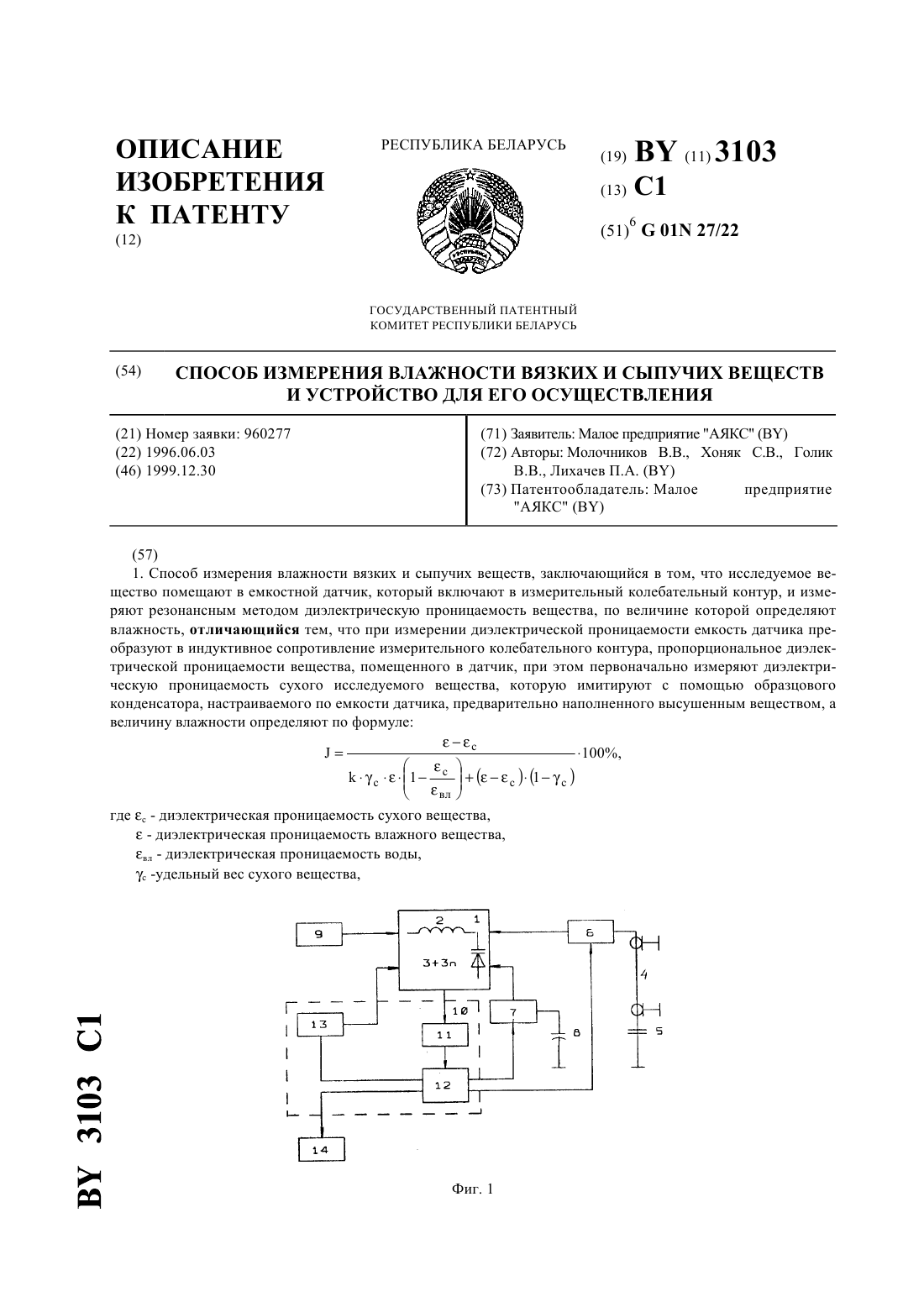
Способ измерения влажности вязких и сыпучих веществ и устройство для его осуществления
Номер патента: 3103
Опубликовано: 30.12.1999
Авторы: Хоняк Сергей Валентинович, Лихачев Павел Александрович, Голик Василий Владимирович, Молочников Виктор Викторович
МПК: G01N 27/22
Метки: вязких, измерения, веществ, способ, влажности, осуществления, сыпучих, устройство
Текст:
...блока поиска резонанса, а первый выход - с блоком индикации, и в устройство введены два ключа и цифроаналоговый преобразователь, причем вход первого ключа соединен с трансформатором сопротивления, вход второго - с образцовым конденсатором, выходы ключей подключены ко второму и третьему входам колебательного контура, а управляющие входы - ко второму и третьему выходам микропроцессорного контроллера, четвертый выход которого соединен с входом...
Предыдущий патент: Способ градуировки и поверки анализаторов растворенного кислорода и устройство для его осуществления
Следующий патент: Система управления гидротрансмиссией и тормозами транспортного средства
Случайный патент: Способ изготовления изделия типа ступенчатого вала поперечно-клиновой прокаткой