Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина
Текст
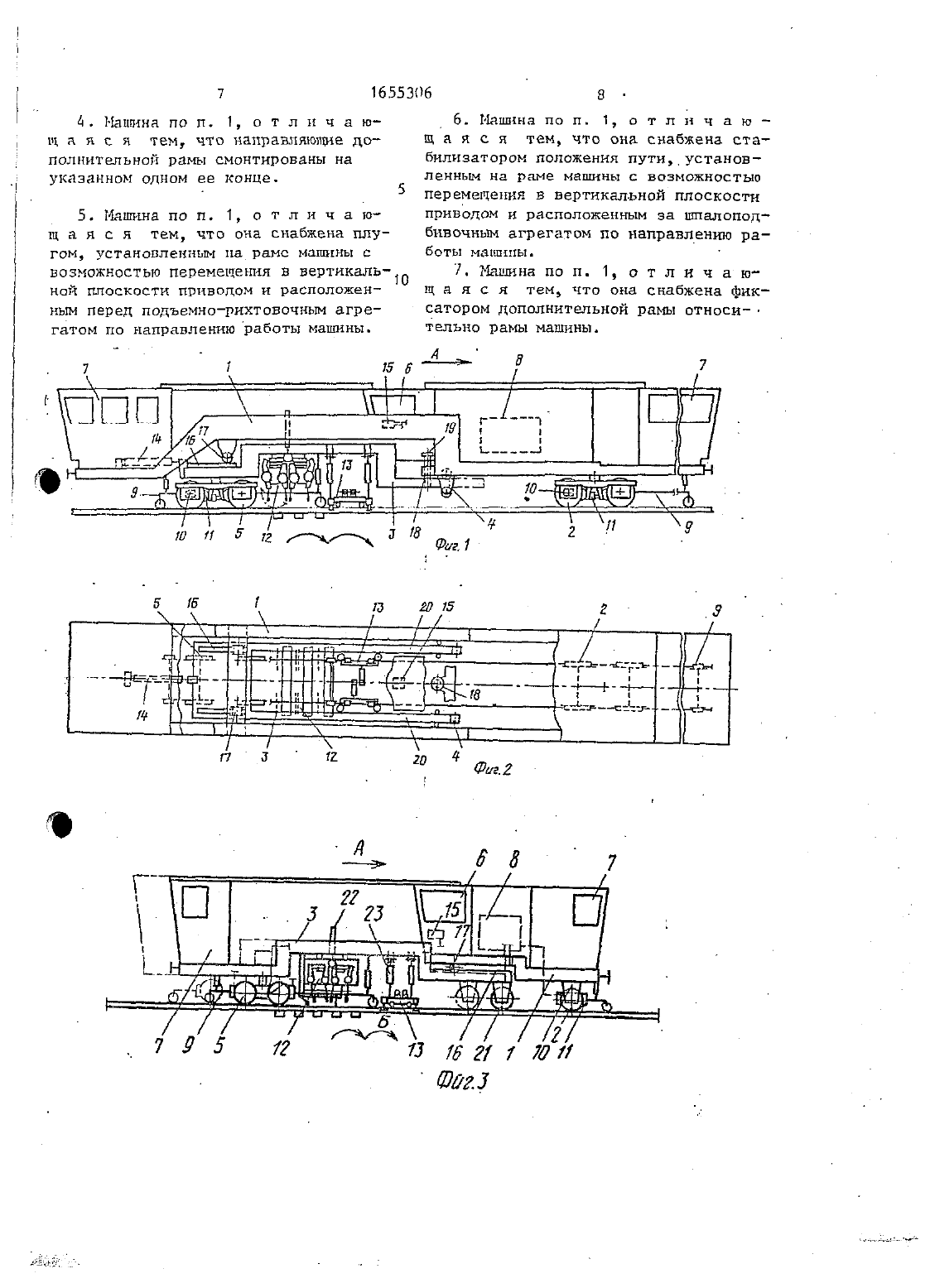
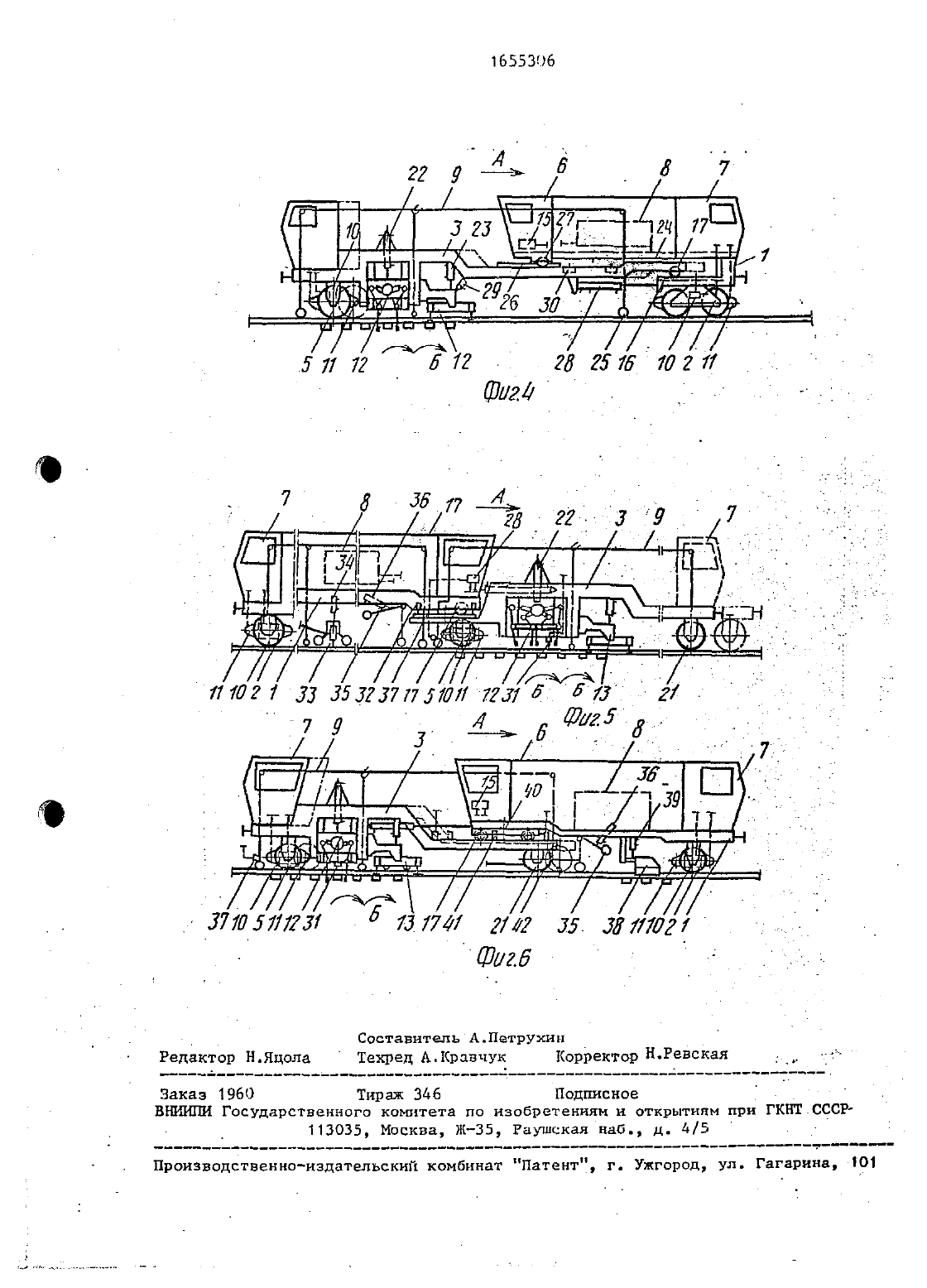
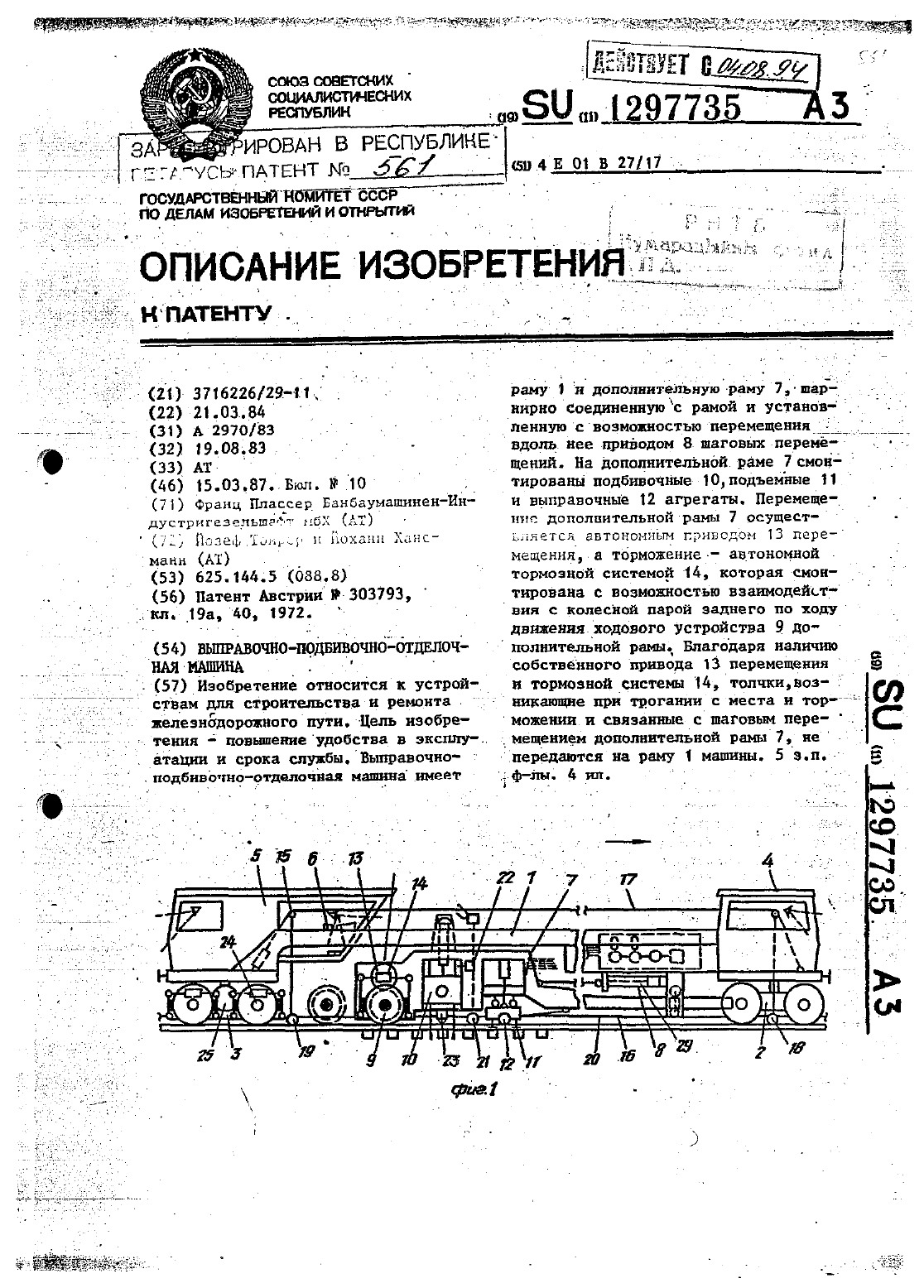
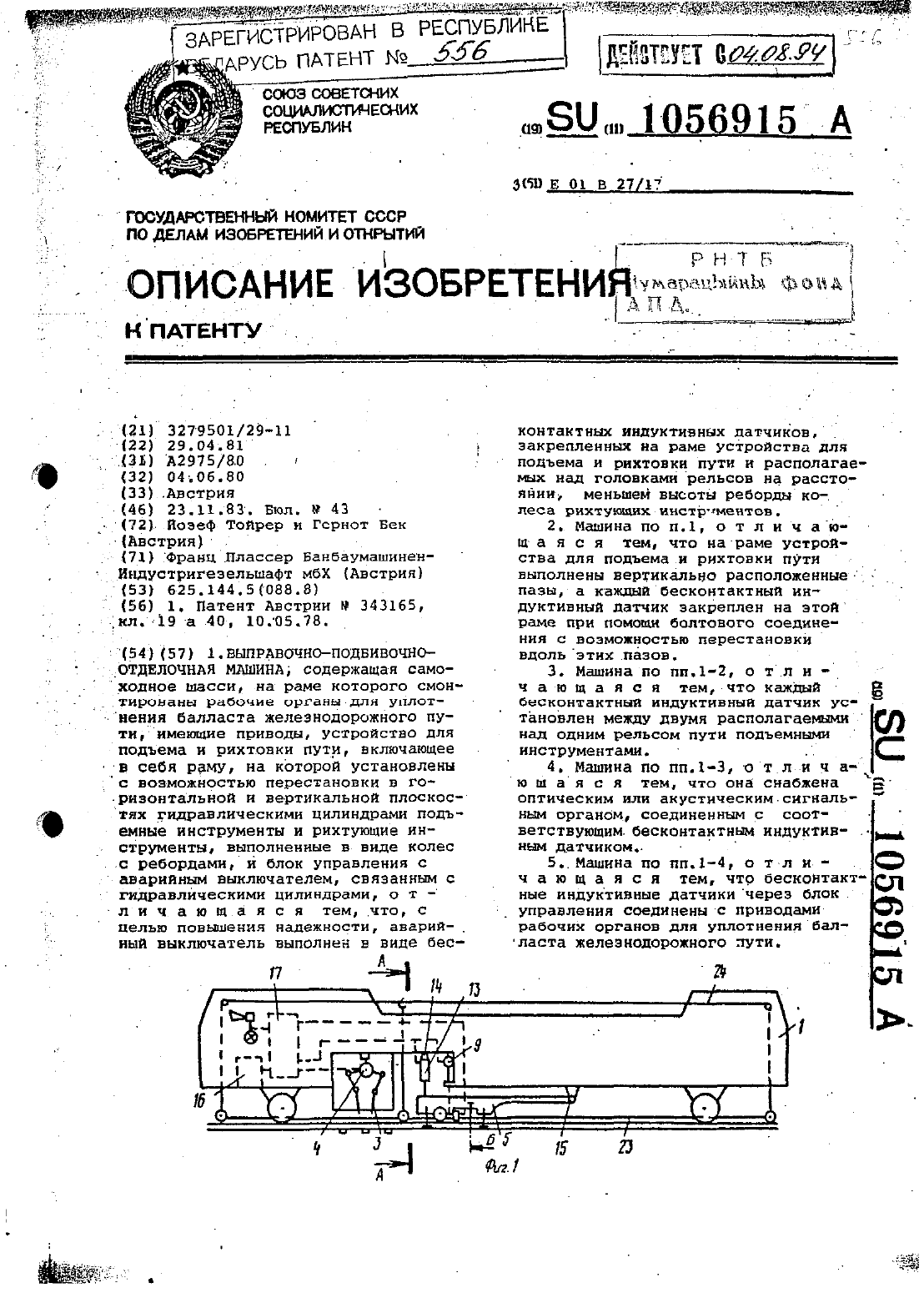
гооыдАеотеЕнный номитат ПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМ ПРИ ГННТ СССР(Е) 4613761/1 ти машины. Малина содержит раму (Р)(22) 30.03.83 первый конец которой опирается на(311 88.89 Ч.196.4 ходОБУЮ тележку, дополнительную ра(ЗИ) 26.07.88 НУ (д) один конец которой установ(33) ЕР лен в роликовых направляющих Р, а(46) 07.06.91. Бюп. т 21 другой оперт на вторую ходовую тележ(71) Франц Плассер Банбаумашинен- ку. На Р смонтированы контрольно-и 3(54) НЕПРЕРЫВНО ПЕРЕЦЕИГАЮЩАЯСЯ В ПРОЦЕССЕ РАБОТЫ ВЫПРАВОЧН 0-П 0 дБИВОЧНО-ОТЛЕЛОЧНЯ ШПИЦА(57) Изобретение относится к устройствам для вьшравки железнодорожного пути и стабилизации его положения. Цель изобретения - упрощение конструкции и повьшение производительносИзобретение относится к устройствам для ремонта железнодорожного пути в частности к устройствам для его выправкн и стабилизации его поло женин.На фиг. 1 показана выправочноподбпвочнототпелочная машна, общий вид на фиг. 2 то же, вид сверку на чфиг 3 6 варианты вьтолиеннл машины .Непрерывно передвигаюшаяся в про нес се па боты выдратючпо-подбягвочно-оттБ себя базовую систему отсчета, ка бина оператора (КО), кабина машиниста (КМ). Ходовые тележки имеют приводы н тормозные механизмы. На ДР смонтированы шпалоподбивочный агрегат и подъемнорихтовочНый агрегат ДР соединена с приводом ее продольного перемещения. В КО установлено устройство управления агрегатами, приводам н механзмам. Второй конец рамы опирается на ДР при помощи опор в виде роликов установленных в направляющх, которые смонтированы на ДР.делочная Машина содержит раму 1, один КОНЕЦ Которой опирается на ходовую тележку 2, дополнительную раму 3,один конец-которой установлен в роли КОВЫ направляющих 4 рамы 1, а второй моперт На ВТОРУЮ ходовую тележку 5. Рама выполнена изогнутой вверх в внде колена. На раме 1 смонтированы кабина 6 оператора, кабина 7 машиниста,силовая установка 8 и контрольно-измерительное устройство 9, включающееВ себя базовую систему отсчета. Тележки 2 и 5 имеют приводы 10 н тормозные механизмы 1. На раме 3 смонтированыно-риктовочный агрегат 13. Рама 3 соединена с приводом 1 д ее ПРОЦОНЪНОГО перемещения, который Представляет собой гплроцилиндр- Б кабине 5 СМОН тнровано устройство 15 управления ука-5 занньш агрегатами 12 и 13, ПРИВОДЗ ми 1 Ю и 1 д и механизмами 11. На раме 3 смонтированы направляющие 16, на которые опираются опоры в виде роликов 17, закрепленные на втором конце рамы 1. Направляющие 16 УСТЗНОЛВНЫ на втором конце рамы 3 (фиг. 1) которая размещена в зоне изогнутой вверх части рамы 1, под ней. Рама 3 имеет 15 фиксатор 18 относительно рамы 1, который стопорит раму 3 при транспортном положении машны. Фиксатор 18 состоит из пальца 19, смонтированного на раме 1, при этом В раме 3 выолнено отверстие для пальца 19. Рама 3 фил) образована из двух проходящих дпараллельно одна другой в продольном направлении машины балок 20, которыедля пальца 19. Кабина Б расположена 1 между балкам 20 на раме 1 для нас блюдения за работой-агрегатов 12 И 13 и управления ими так, что может обеспечить беспрепятственное смещение раЗ 0 мы З относительно рамы 1. Представленная на фиг. 3 машинатакже содержит раму 1, смонтированные на ней кабины 6 и 7, силовую установч ку 8, устройство 15 управления, роликовые направляющие Д. Машина также 35 содержит раму 3, опирающуюся на тележки 5 и 21 И несущую агрегаты 12м опирается на тележку 2, а вторым.-. раму З, при этом на раме 3 смонти-40 рованы направляющие 16, на которые опираются опоры в виде роликовьш напраляющик 4. Одна кабина 7 смонтиро вана на раме 3. Агрегаты.12 и 13 имеют приводы 22 и 23 перестановки их по высоте.Изображенная на фиг. д машна содержит раму 1, опирающуюся На телекс ку 2, раму 3, опирающуюся на тележку 5. Рама 1 имеет консольную высту- 50 дающую за тележку 2 часть 24, на которой смонтированы силовая установка 8 и кабины 6 и 7. На машине смонтировано контрольноизмерительное устройст-. во 9, включающее В себя базовую сис 55 тему отсчета и следящие ролики 25,установленные с возможностью перестановки по высоте. Для установки перед и 13 и устройство 9. Рама 1 одним кон 45ней части рамы 3 рама 1 выолнена из двух параллельных расположенных один над ДПУГИМ ГОРНЭОНТЗЛЬНЬХ УЧЗСТКОВ,соединенных между собой в передней части машны, причем нижний горизонтальный участок имеет направляющие 16,на которые опираются ролики 17, закрепленные на передней части рамы З. На последней закреплены направляющие. 26, на которые опираются ролики 27,установленные на верхнем горизонтальном участке рамы 1. Рама З фиксируется относительно рамы 1 гидроцилиндром 28. На раме 3 установлены шпалаподбивочный агрегат 12 и подъемнорихтовочный агрегат 13. Агрегат 12. имеет привод 22 перестановки по высо-те, а агрегат 13 - привод 23 нерестановки по высоте (подъемки пути) и привод 29 рихтовки пути. Управление всеми приводами и агрегатами 12 и 13,а также тормозными механизмами 11 осуществляется устройством 15 управления, которое соединено с концевыми вьтлючателями 30 И взаимодействующих с ними элементов замедления. Выключатели 30 обеспечивают продольное перемещение роликов 17 и 27 только в пределак направляющих 16 и 26. Изображенная на фиг 5 машна содержит рамы 1 и 3. На раме З установлены агрегаты 12 и 13. В зоне агрегата 12 установлен взаимодействующий с рельсовым скреплениями индуктивный датчик 31, соединенный с устройством 15 управления и предназначен НЫЙ для точного центрирования шпале подбивочного агрегата 12 относительно подбиваемы шпал. Гидроцилиндр 28 фиксирует рамы 1 и 3 одна относительно другой при переезде машны с одного ремонтируемого участка пути на другой (в транспортном положении машны). Рама 3 опирается на тележки 5 И 21, а рама 1 - на тележку 2 и раму 3 при помощи опор в виде роликов 17, установленныхъна направляющие 16. Рама 3 также имеет роликовые направ ляющие 32. На раме 1 установлен стабилизатор З 3 положения путнсоедннен ный с приводом 34 перемещения в вертикальной плоскости.Стабилизатор-33 положения пути расположен за агрегатом 12 по направлению работы машины. Рама 1 имеет . опору 35 в виде колеса с-гребнем, поднимающуюся приводом 36.-Опора 35 используется при разъединении рам 1и 3 (отсоединения штока гидроцилиндч ра 28 от рамы 1), при этом рамы 1 п 3 используются отдельно при вьтолнении незначительных работ по подбивке 1 шал. РамаР 3.может испольвоватвсп ис потиному-оснащенной рамой 1. На машине установлен датчик 37 пройденного пути, включающий В себя измерительное колесо для измерения пройденного 10 машной пути.Изображенная на фиг. 6 машина со держит рамы 1 н 2, опирающиеся на те лежки 2,5 и 21. Рама 1 также имеет опору 35 в виде колеса с гребнем, 15 соединенную с приводом 36. На раме 1 установлен плуг 38 с возможностью перемещения в вертикальной плоскостиемнорихтовочны агрегатом 13 по на 20 правлению работы машины. Второй конец рамы 1 установлен с возможностью поворота вокруг вертикальной оси 40 На раме 3 установлены боковые нар правллющие ролики 41 для рамы 1, роли 25 ки 41 вращаются вокруг вертикальных осей. На концевых участках направляющх 16 установлены конечные выкпючате ли д 2, отключающие привод перемещения рамы 3 относительно рамы 1. В зоне 35 агрегата 12 установлен индуктивньй датчик 31, а 3 конце рамы 3 датчик 37 пройденного пути. Машна работает следующим образом.При работе машины рама 1, опирают щаяся на тележку 2 и через раму 3 на тележку 5 н несущая кабины 6 и 7,атакже агрегаты 12 и 13, непрерьщно перемещаются в направлении стрелки А да при иепрерьшном управлении всеми при- водам И агрегатами 12 И 13 устройством 15 управления. Одновременно с непрерьшным перемещением машны рама 3 Циклично перемещаетсяв направлени -д 5 СТРЕЛОК Б ОТ ОДНОЙ ЗОНЫ УПЛОТНЗНИЯ балласта к другой. Для этого после окончания уплотнения балласта водной зоне и подъема агрегата 12 с помощью устройства 15 приводится в действие 59 Пшшщ 1 Птщшши 5,щиэшмрша 3 ПРИВОДОМ 4 или гндроцилиндром 28 быстро перемещается в переднее рабочеелинией на фнг.. Роликовые направч 55 ллющме Ц могут быть установлены нараме 1 с возможностью перемещения поперек машины приводом, что обеспечит более точное ориентирование агрега тов 12 н 13 относительно рельсов цути в криволинейных его участках. .При необходимости на путь может быть опущен приводом 39 плуг 38, чтобы произвести разравниваиие балласта. Стабилизатор 33 положения пути обеспечивает доуплотнение балласта после шпалоподбивонного агрегата 12 и обеспечивает после себя устойчивое стаби лизированное положение пути. Благодаря установке рамы 1 с возможностью поворота вокруг оси дд обеспечивается беспрепятственная работамашины вкриволинейнъш Участках пути. Ф о р м у п а и з о б р е т е н н Я1. Непрерывно пе 9 еДВИГаЮЩаЯСЯ В процессе работы выправочноподбивоч ноотделочная машина, содержащая рат му один конец которой оперт на ходовую тележку, смонтированные на Раме кабину оператора, силовую установку,привод ходовой тележки, контрольноизмерительное устройство, включающее в себя базовую систему отсчета, ДОПОЛ нительную раму, один конецК 0 Т 0 Р 0 й УСТЭНОВЛЕН Б НЗПРНВЛЯЮЕЕХ рамы мазшнън,а второй оперт на вторую ходовую те ЛЕЪЖКУ, ПРИВОД ПРОДОЛЬНОГО ПЕРЕМЕЩЕНИЕдополнительной рамы относительно рамы машины, установленные на дополниитепьной раме шлалоподбнвочной агре гат.и подъемнорнхтовочный агрегат,а также тормозные механизмы и смонтит рованные на раме машины устройства управления указанным приводам, агрегатами и тормозным меканизмавщ,о т л И ч а ю щ а я с-я тем, что,с целью упрощения конструкции И пот вышения производительности, второй конец рамы малины оперт на дополнительную раму при помощи опор, уетач новпенных с возможностью перемещения в направляющих, которые смонтированы на дополнительной раме.2. Машина по п. 1, о т л и ч а юЩ а я с я тем, что дополнительная рама имеет Побраэную форму н На Нижт них частях ее стоек установлены горизонтальные кронштейны, один из которых установлен в указанных неправляю шик рамы, а на втором смонтированы направляюще для опор.3. Машина по п. 1, о т л и Ч а ют Щ а яс Я тем, что направлнющиедо полпительной рамы установлены не втором ее конце.д. Ъшптна по п. 1, о т л н ч а ющ а я с Я тем, что направляющие дополнительной рамы смонтированы на указанном одном ее конце 5 5. Машина по п. 1, о т л И ч а ю Щ а Я С Я ТЕМ, ЧТО она снабжена ПЛУ ГОН, УСТЗНОВЛЭННЬЩ на раме машины С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕЪШЕЯ В ВЕРТИКЭЛЬОной плоскости приводом И ргположен ным перед подъемно-рнхтовочным агрегатом по направлению работы машины.6. Машина по п. 1, 0 т п Н ч а ю Щ а я с я тем, что она снабжена ста билизатором положения пути, установленным на раме машны с возможностью перемещения в вертикальной Плоскости приводом и расположенным за шпалопод бивочны агрегатом по направлению работы маштны.7. Машна по п. 1, о т л И ч а юд щ а я с я тем, что она снабжена фиксатором дополнительной рамы относительно рамы машины.
МПК / Метки
МПК: E01B 27/17
Метки: выправочно-подбивочно-отделочная, машина, работы, передвигающаяся, непрерывно, процессе
Код ссылки
<a href="https://by.patents.su/5-571-nepreryvno-peredvigayushhayasya-v-processe-raboty-vypravochno-podbivochno-otdelochnaya-mashina.html" rel="bookmark" title="База патентов Беларуси">Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина</a>
Выправочно-подбивочно-отделочная машина
Номер патента: 561
Опубликовано: 30.06.1995
Авторы: Йозеф Тойрер, Йоханн Хансманн
МПК: E01B 27/17
Метки: выправочно-подбивочно-отделочная, машина
Текст:
...хордовой-проволоки 17, передний конец которой посредством щупа 18 перемещается по неоткорректированномуй рельсу, а ее задний конец посредст 1 Аг вом другого щупа 19 перемещается пое 5 ТРУБОПРОЕОД 30 и открыты запорныйуже.откорректированному рельсу. Рихч клапан 31 ставится под давление не. топочная система 16 отсчета координат 5 ПОСРЗДСТВВННО ИЗ ГИДРЗВЙНЧЕСКОГО включает в себя хордОВУЮ проволоку трубопровода 32 привода 13...
Выправочно-подбивочно-отделочная машина
Номер патента: 556
Опубликовано: 30.06.1995
Авторы: Гернот Бёк, Йозеф Тойрер
МПК: E01B 27/17
Метки: выправочно-подбивочно-отделочная, машина
Текст:
...машмнед содержащей самоходное шасси, на раме которогосмонтированы рабое чне органы для уплотнения балластавод, устройство для подъема н рнх товкн пути, включающее в себя раму,на которой установлены с возможнос трио перестановки в кэризонтапьной и вертикальной плоскостях гидравли ческими цилиндрами подъемные инстр 9 35машина содержит самоходное шасси 1, на раме 2 которого смонтированы рабочне органы 3 для уплотнения балласта...
Передвижная выправочно-подбивочная машина
Номер патента: 562
Опубликовано: 30.06.1995
Авторы: Йоханн Хансманн, Йозеф Тойрер
МПК: E01B 27/17
Метки: выправочно-подбивочная, передвижная, машина
Текст:
...жен подиинаемый и спускаемый по нап- двигатель 32, ввшолненньй, например. равляющим приводом подъема шпалопод в виде многоцилиндрового дизельного бнвочный рабочи орган 23, перед двигателя, соедиенньй с ним генеКТ 0 Пым смонтированы выправочныйра- 55 ратор 33, гидравлический насос 34 с б 0 ЧН орган 24 сподъемными ролико . подключенным к нему ресивером 35 н выми захватами 25 и рихтовочнми ро- соединенный с двигателем 32 компреслнкнмн 25...
Передвижная выправочно-подбивочная машина
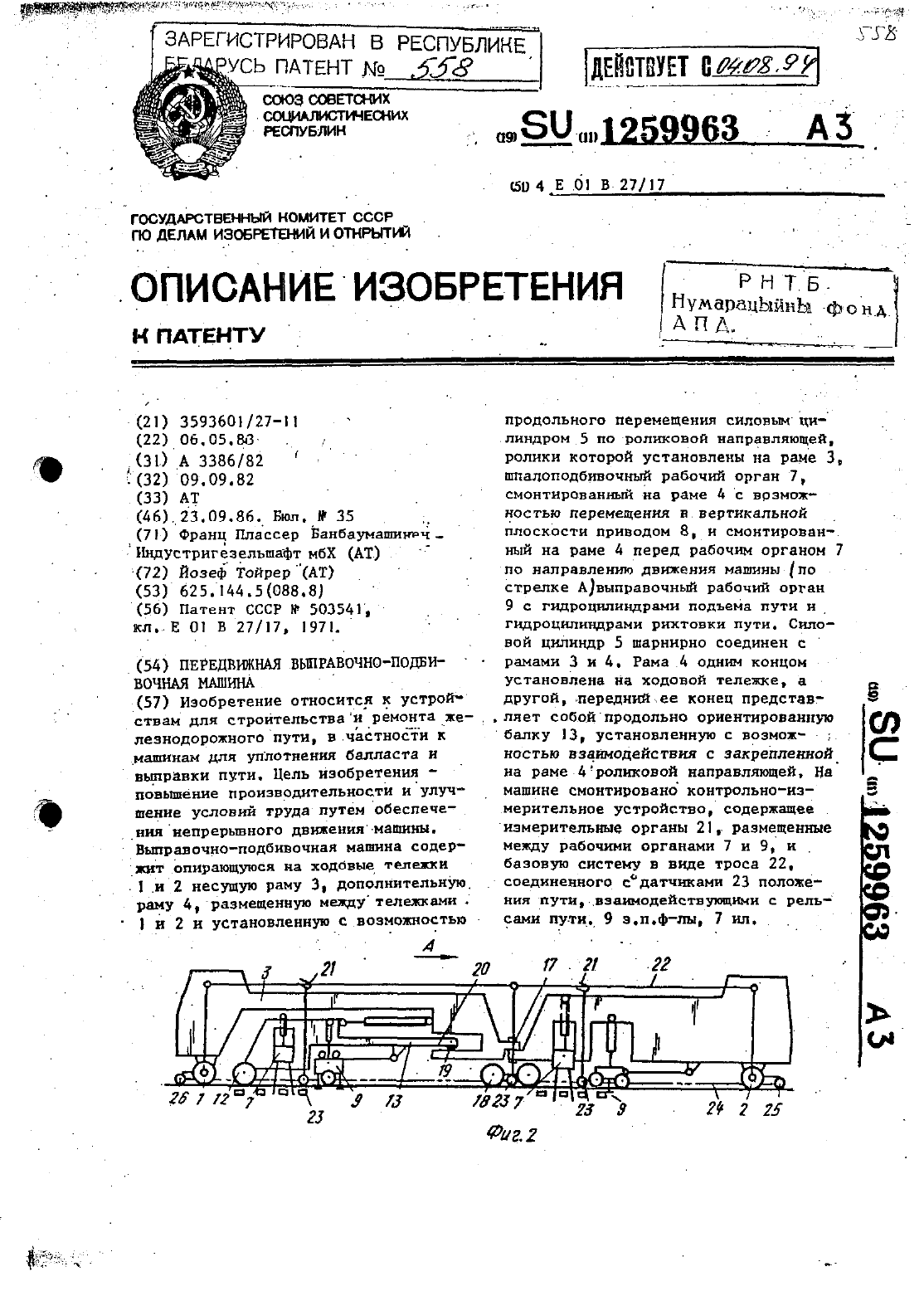
Номер патента: 558
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/17
Метки: машина, выправочно-подбивочная, передвижная
Текст:
...0 РУдована дополнительным устройствами,согласно которому рама 4 смонтиро-пути, который через каждый сантиметрдОна раме 4 примерно по осн симмет- Комбинированная базовая система- рин шалоподбивочного рабочего орга- (фиг.5) пригодиа. например. для УС на 7. Этот датчик 40 ведет себя нейт- .тановки в выправочно-подбивочную ма сительное перемещение между рамой 4КОТОРЫВ ОбеСПеЧНВдЮТ аВТНаТЧеСКОе Щего положения индуктивный датчик 40 УПРЕВПЕНИЕ...
Шпалоподбивочная машина
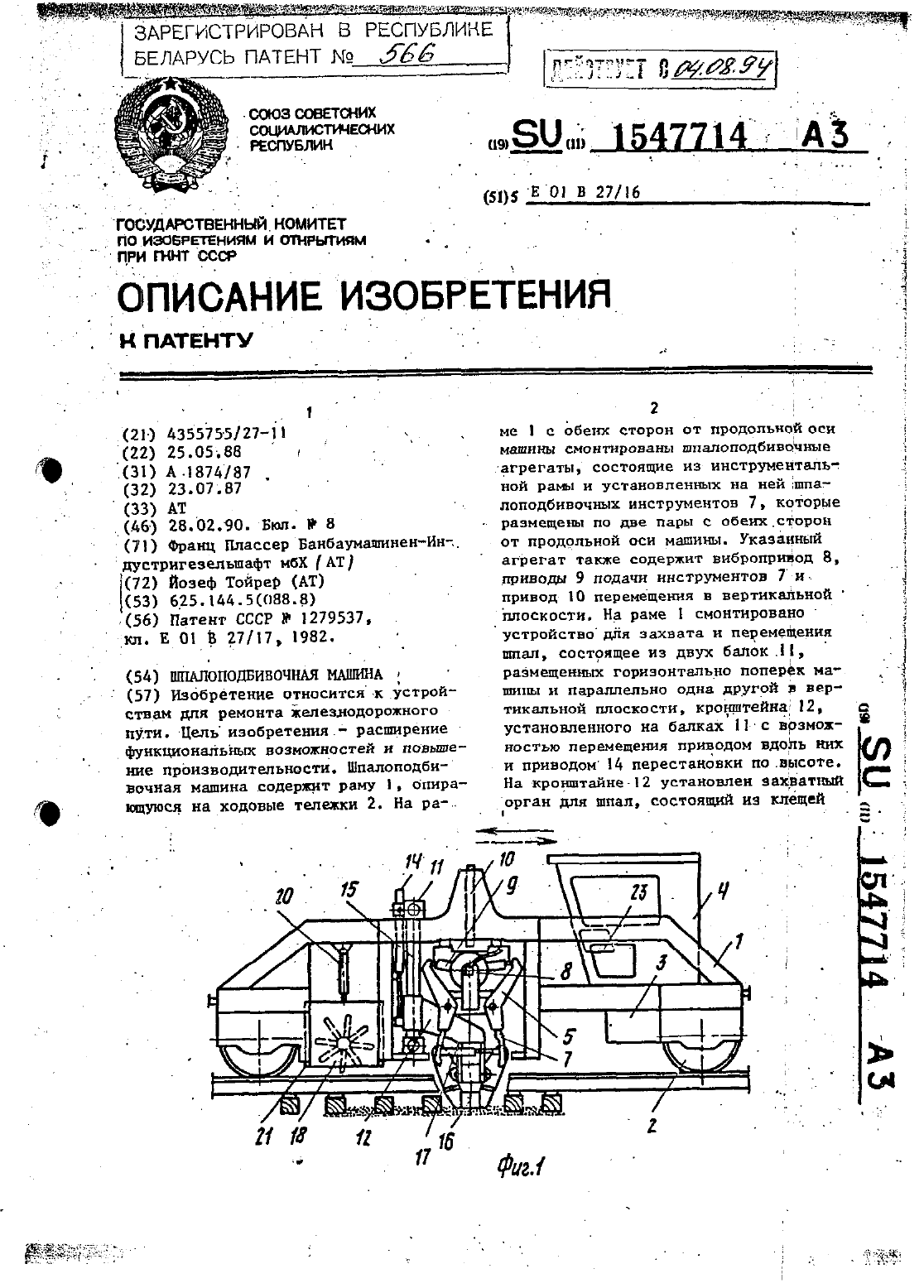
Номер патента: 566
Опубликовано: 30.06.1995
Автор: Йозеф Тойрер
МПК: E01B 27/16
Метки: машина, шпалоподбивочная
Текст:
...не будет выдвинута нз.путн нас.эонтально поперек машиы в параллелъ Н только, чтобы е можно было беслрет г но одна другой в вертикальной плес- пятственво убрать-путевым рабочим. кости, кронштейна 12, установленного 5 На.местоиэвлеченной шпалы сразу может на балках 11 Йс возможностью перемеще 4 быть установлена новая шпала. Эта 1 щпа ния приводом 13 вдоль них и приводом ла путевым рабочим вдвигается на мес-16 перестановки по высоте. С...
Предыдущий патент: Способ тепловой герметизации упаковочного ламината
Следующий патент: Способ получения E-изомеров производных акриловой кислоты
Случайный патент: Всенаправленная система тревожной сигнализации транспортного средства