Система слежения и управления рабочим органом одноковшового фронтального погрузчика

Текст
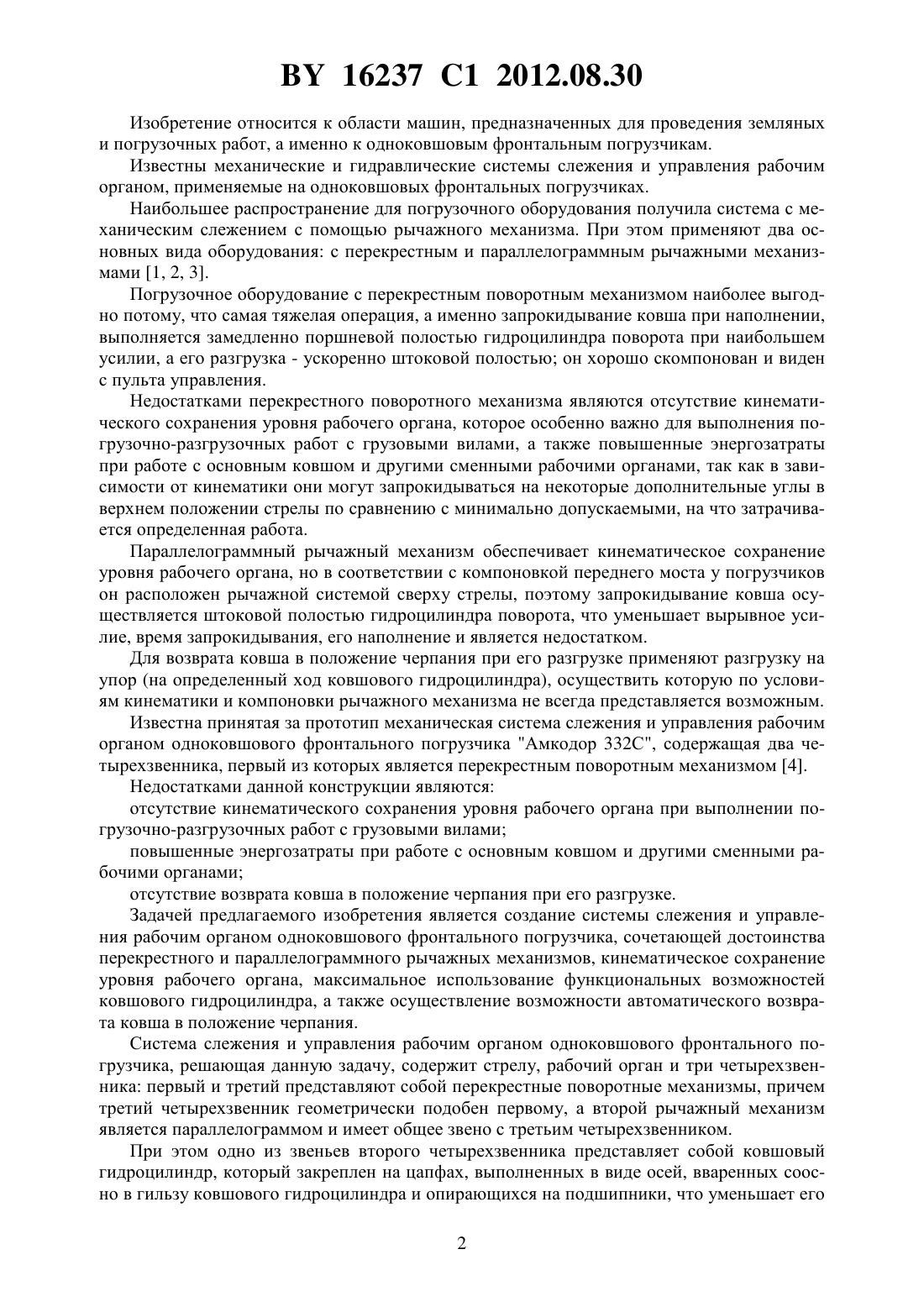
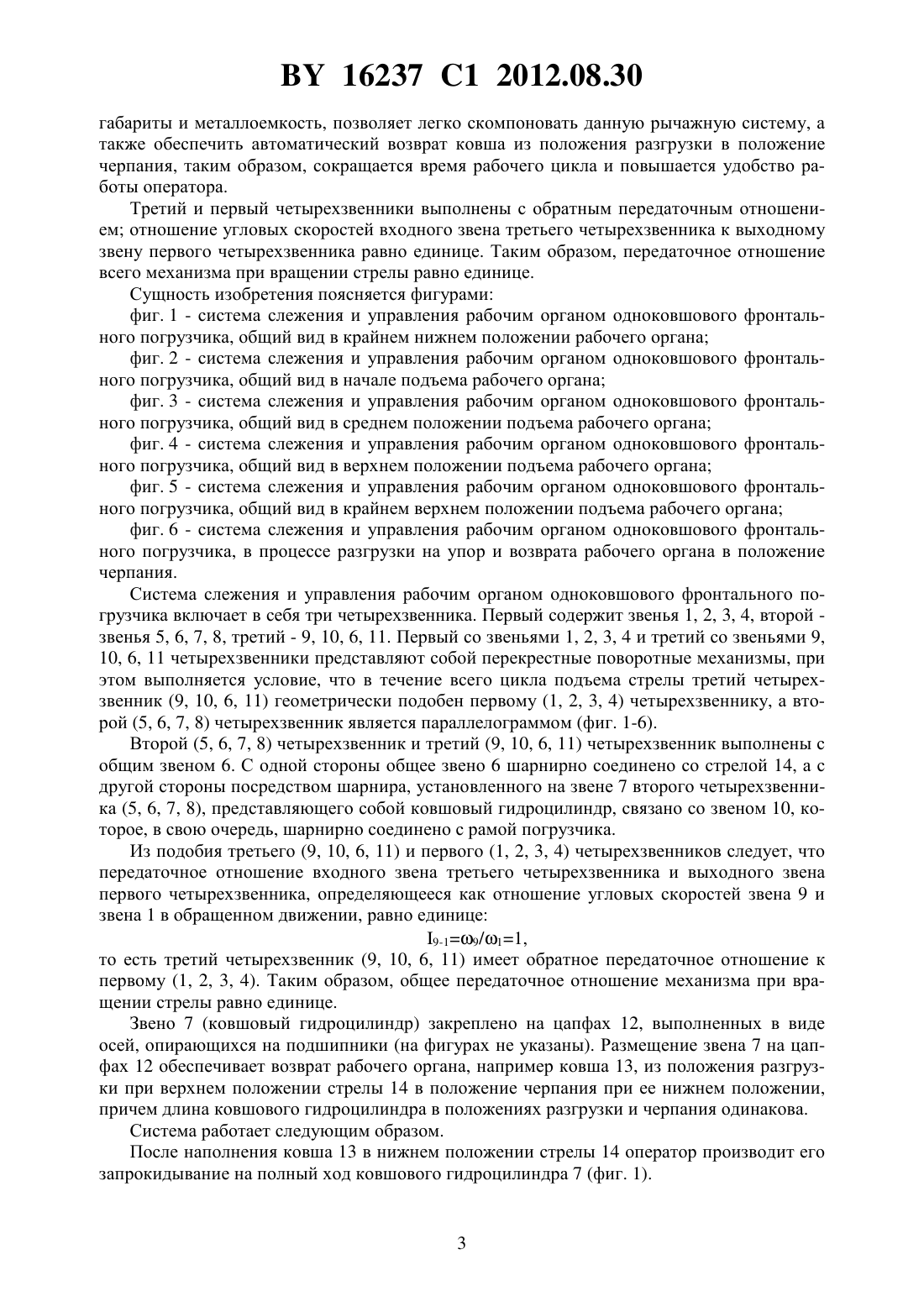
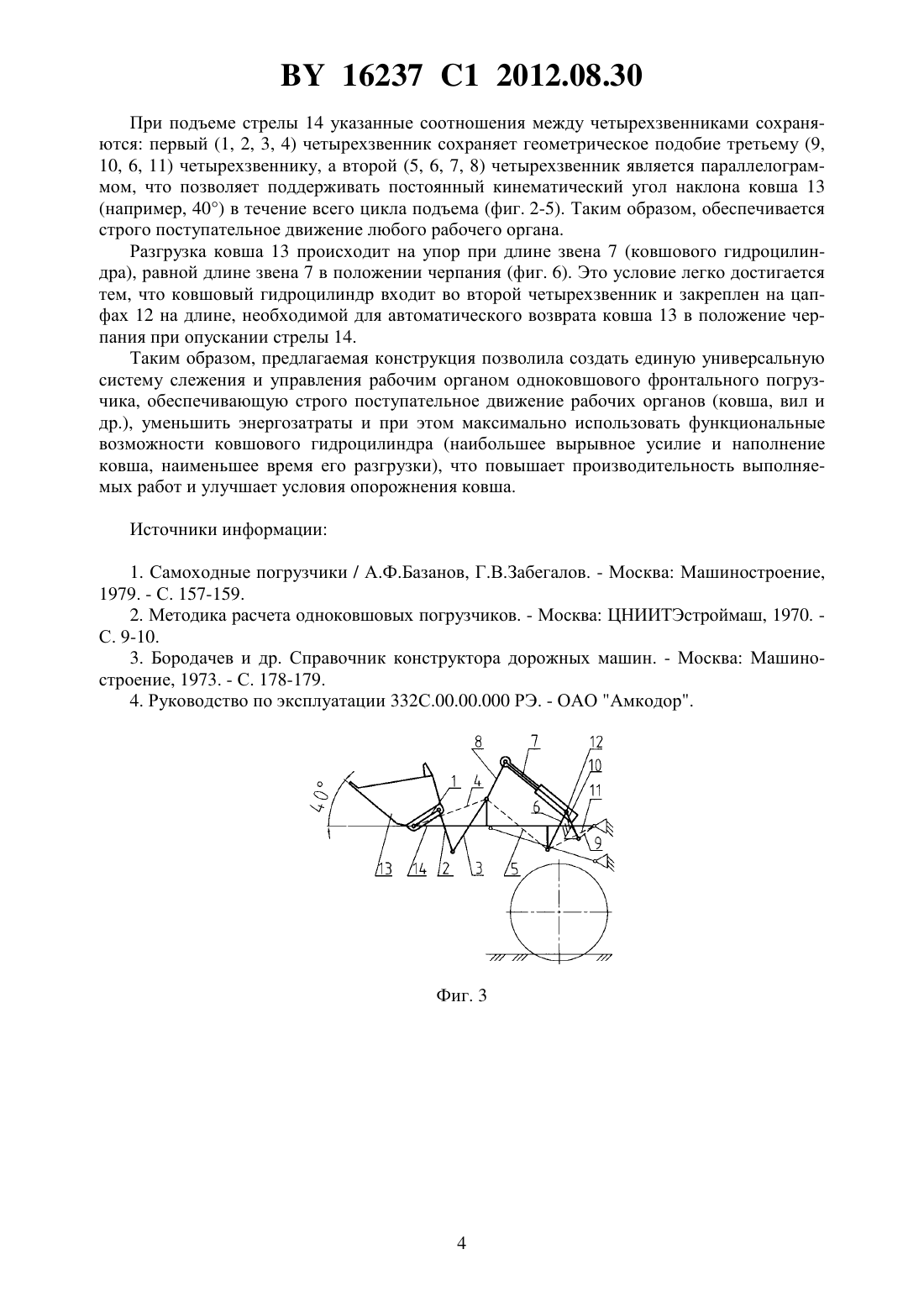
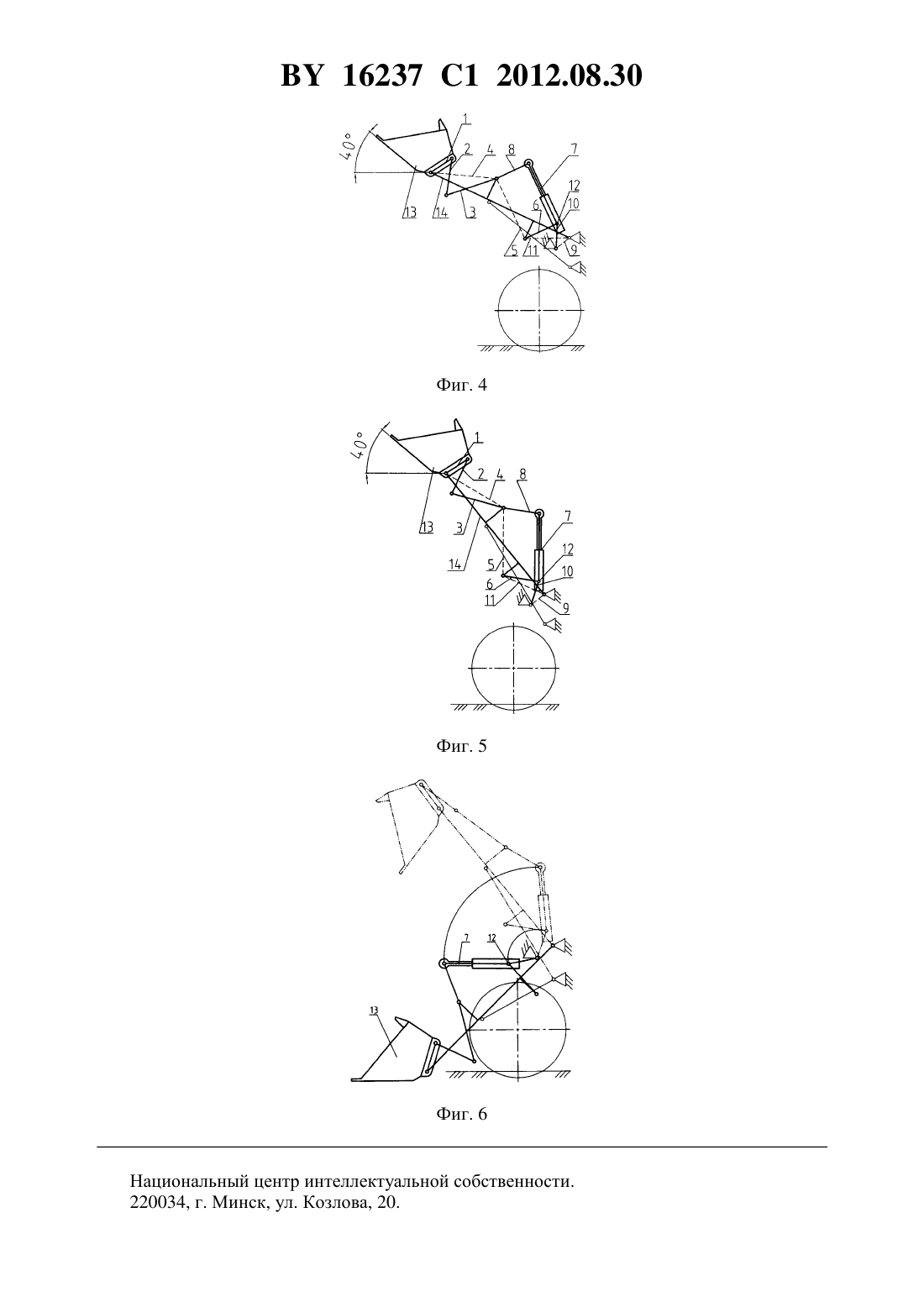
(51) МПК НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ СИСТЕМА СЛЕЖЕНИЯ И УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА(71) Заявитель Открытое акционерное общество Амкодор(72) Автор Смирнов Анатолий Николаевич(73) Патентообладатель Открытое акционерное общество Амкодор(56) Руководство по эксплуатации 342 В.00.00.000 РЭ ОАО Амкодор. Минск, 2008. - С. 103, 105.27931 1, 2003.2072017 1, 1997.2119013 1, 1998.(57) Система слежения и управления рабочим органом одноковшового фронтального погрузчика, содержащая первый четырехзвенник, выполненный в виде перекрестного поворотного механизма и связанный с ковшом одноковшового фронтального погрузчика, и второй четырехзвенник, связанный со стрелой одноковшового фронтального погрузчика,отличающаяся тем, что включает дополнительный четырехзвенник, выполненный в виде геометрически подобного первому четырехзвеннику перекрестного поворотного механизма, связанный со стрелой одноковшового фронтального погрузчика и соединенный общим звеном со вторым четырехзвенником, выполненным в виде параллелограмма, одним из звеньев которого является ковшовый гидроцилиндр, установленный таким образом, что в положении черпания и в положении разгрузки ковшовый цилиндр имеет одинаковую длину для обеспечения возможности автоматического возврата ковша из положения разгрузки при верхнем положении стрелы в положение черпания при ее нижнем положении. 16237 1 2012.08.30 Изобретение относится к области машин, предназначенных для проведения земляных и погрузочных работ, а именно к одноковшовым фронтальным погрузчикам. Известны механические и гидравлические системы слежения и управления рабочим органом, применяемые на одноковшовых фронтальных погрузчиках. Наибольшее распространение для погрузочного оборудования получила система с механическим слежением с помощью рычажного механизма. При этом применяют два основных вида оборудования с перекрестным и параллелограммным рычажными механизмами 1, 2, 3. Погрузочное оборудование с перекрестным поворотным механизмом наиболее выгодно потому, что самая тяжелая операция, а именно запрокидывание ковша при наполнении,выполняется замедленно поршневой полостью гидроцилиндра поворота при наибольшем усилии, а его разгрузка - ускоренно штоковой полостью он хорошо скомпонован и виден с пульта управления. Недостатками перекрестного поворотного механизма являются отсутствие кинематического сохранения уровня рабочего органа, которое особенно важно для выполнения погрузочно-разгрузочных работ с грузовыми вилами, а также повышенные энергозатраты при работе с основным ковшом и другими сменными рабочими органами, так как в зависимости от кинематики они могут запрокидываться на некоторые дополнительные углы в верхнем положении стрелы по сравнению с минимально допускаемыми, на что затрачивается определенная работа. Параллелограммный рычажный механизм обеспечивает кинематическое сохранение уровня рабочего органа, но в соответствии с компоновкой переднего моста у погрузчиков он расположен рычажной системой сверху стрелы, поэтому запрокидывание ковша осуществляется штоковой полостью гидроцилиндра поворота, что уменьшает вырывное усилие, время запрокидывания, его наполнение и является недостатком. Для возврата ковша в положение черпания при его разгрузке применяют разгрузку на упор (на определенный ход ковшового гидроцилиндра), осуществить которую по условиям кинематики и компоновки рычажного механизма не всегда представляется возможным. Известна принятая за прототип механическая система слежения и управления рабочим органом одноковшового фронтального погрузчика Амкодор 332 С, содержащая два четырехзвенника, первый из которых является перекрестным поворотным механизмом 4. Недостатками данной конструкции являются отсутствие кинематического сохранения уровня рабочего органа при выполнении погрузочно-разгрузочных работ с грузовыми вилами повышенные энергозатраты при работе с основным ковшом и другими сменными рабочими органами отсутствие возврата ковша в положение черпания при его разгрузке. Задачей предлагаемого изобретения является создание системы слежения и управления рабочим органом одноковшового фронтального погрузчика, сочетающей достоинства перекрестного и параллелограммного рычажных механизмов, кинематическое сохранение уровня рабочего органа, максимальное использование функциональных возможностей ковшового гидроцилиндра, а также осуществление возможности автоматического возврата ковша в положение черпания. Система слежения и управления рабочим органом одноковшового фронтального погрузчика, решающая данную задачу, содержит стрелу, рабочий орган и три четырехзвенника первый и третий представляют собой перекрестные поворотные механизмы, причем третий четырехзвенник геометрически подобен первому, а второй рычажный механизм является параллелограммом и имеет общее звено с третьим четырехзвенником. При этом одно из звеньев второго четырехзвенника представляет собой ковшовый гидроцилиндр, который закреплен на цапфах, выполненных в виде осей, вваренных соосно в гильзу ковшового гидроцилиндра и опирающихся на подшипники, что уменьшает его 2 16237 1 2012.08.30 габариты и металлоемкость, позволяет легко скомпоновать данную рычажную систему, а также обеспечить автоматический возврат ковша из положения разгрузки в положение черпания, таким образом, сокращается время рабочего цикла и повышается удобство работы оператора. Третий и первый четырехзвенники выполнены с обратным передаточным отношением отношение угловых скоростей входного звена третьего четырехзвенника к выходному звену первого четырехзвенника равно единице. Таким образом, передаточное отношение всего механизма при вращении стрелы равно единице. Сущность изобретения поясняется фигурами фиг. 1 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, общий вид в крайнем нижнем положении рабочего органа фиг. 2 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, общий вид в начале подъема рабочего органа фиг. 3 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, общий вид в среднем положении подъема рабочего органа фиг. 4 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, общий вид в верхнем положении подъема рабочего органа фиг. 5 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, общий вид в крайнем верхнем положении подъема рабочего органа фиг. 6 - система слежения и управления рабочим органом одноковшового фронтального погрузчика, в процессе разгрузки на упор и возврата рабочего органа в положение черпания. Система слежения и управления рабочим органом одноковшового фронтального погрузчика включает в себя три четырехзвенника. Первый содержит звенья 1, 2, 3, 4, второй звенья 5, 6, 7, 8, третий - 9, 10, 6, 11. Первый со звеньями 1, 2, 3, 4 и третий со звеньями 9,10, 6, 11 четырехзвенники представляют собой перекрестные поворотные механизмы, при этом выполняется условие, что в течение всего цикла подъема стрелы третий четырехзвенник (9, 10, 6, 11) геометрически подобен первому (1, 2, 3, 4) четырехзвеннику, а второй (5, 6, 7, 8) четырехзвенник является параллелограммом (фиг. 1-6). Второй (5, 6, 7, 8) четырехзвенник и третий (9, 10, 6, 11) четырехзвенник выполнены с общим звеном 6. С одной стороны общее звено 6 шарнирно соединено со стрелой 14, а с другой стороны посредством шарнира, установленного на звене 7 второго четырехзвенника (5, 6, 7, 8), представляющего собой ковшовый гидроцилиндр, связано со звеном 10, которое, в свою очередь, шарнирно соединено с рамой погрузчика. Из подобия третьего (9, 10, 6, 11) и первого (1, 2, 3, 4) четырехзвенников следует, что передаточное отношение входного звена третьего четырехзвенника и выходного звена первого четырехзвенника, определяющееся как отношение угловых скоростей звена 9 и звена 1 в обращенном движении, равно единице 9-19/11,то есть третий четырехзвенник (9, 10, 6, 11) имеет обратное передаточное отношение к первому (1, 2, 3, 4). Таким образом, общее передаточное отношение механизма при вращении стрелы равно единице. Звено 7 (ковшовый гидроцилиндр) закреплено на цапфах 12, выполненных в виде осей, опирающихся на подшипники (на фигурах не указаны). Размещение звена 7 на цапфах 12 обеспечивает возврат рабочего органа, например ковша 13, из положения разгрузки при верхнем положении стрелы 14 в положение черпания при ее нижнем положении,причем длина ковшового гидроцилиндра в положениях разгрузки и черпания одинакова. Система работает следующим образом. После наполнения ковша 13 в нижнем положении стрелы 14 оператор производит его запрокидывание на полный ход ковшового гидроцилиндра 7 (фиг. 1). 16237 1 2012.08.30 При подъеме стрелы 14 указанные соотношения между четырехзвенниками сохраняются первый (1, 2, 3, 4) четырехзвенник сохраняет геометрическое подобие третьему (9,10, 6, 11) четырехзвеннику, а второй (5, 6, 7, 8) четырехзвенник является параллелограммом, что позволяет поддерживать постоянный кинематический угол наклона ковша 13(например, 40) в течение всего цикла подъема (фиг. 2-5). Таким образом, обеспечивается строго поступательное движение любого рабочего органа. Разгрузка ковша 13 происходит на упор при длине звена 7 (ковшового гидроцилиндра), равной длине звена 7 в положении черпания (фиг. 6). Это условие легко достигается тем, что ковшовый гидроцилиндр входит во второй четырехзвенник и закреплен на цапфах 12 на длине, необходимой для автоматического возврата ковша 13 в положение черпания при опускании стрелы 14. Таким образом, предлагаемая конструкция позволила создать единую универсальную систему слежения и управления рабочим органом одноковшового фронтального погрузчика, обеспечивающую строго поступательное движение рабочих органов (ковша, вил и др.), уменьшить энергозатраты и при этом максимально использовать функциональные возможности ковшового гидроцилиндра (наибольшее вырывное усилие и наполнение ковша, наименьшее время его разгрузки), что повышает производительность выполняемых работ и улучшает условия опорожнения ковша. Источники информации 1. Самоходные погрузчики / А.Ф.Базанов, Г.В.Забегалов. - Москва Машиностроение,1979. - С. 157-159. 2. Методика расчета одноковшовых погрузчиков. - Москва ЦНИИТЭстроймаш, 1970. С. 9-10. 3. Бородачев и др. Справочник конструктора дорожных машин. - Москва Машиностроение, 1973. - С. 178-179. 4. Руководство по эксплуатации 332 С.00.00.000 РЭ. - ОАО Амкодор. Фиг. 6 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20. 5
МПК / Метки
МПК: E02F 3/43
Метки: одноковшового, слежения, органом, рабочим, фронтального, управления, погрузчика, система
Код ссылки
<a href="https://by.patents.su/5-16237-sistema-slezheniya-i-upravleniya-rabochim-organom-odnokovshovogo-frontalnogo-pogruzchika.html" rel="bookmark" title="База патентов Беларуси">Система слежения и управления рабочим органом одноковшового фронтального погрузчика</a>
Гидросистема управления рабочим оборудованием фронтального погрузчика
Номер патента: U 4587
Опубликовано: 30.08.2008
Авторы: Веренич Иван Андреевич, Байко Вадим Владимирович, Салата Алексей Вячеславович, Лукашевич Дмитрий Викторович
МПК: B66F 9/20
Метки: гидросистема, фронтального, погрузчика, оборудованием, рабочим, управления
Текст:
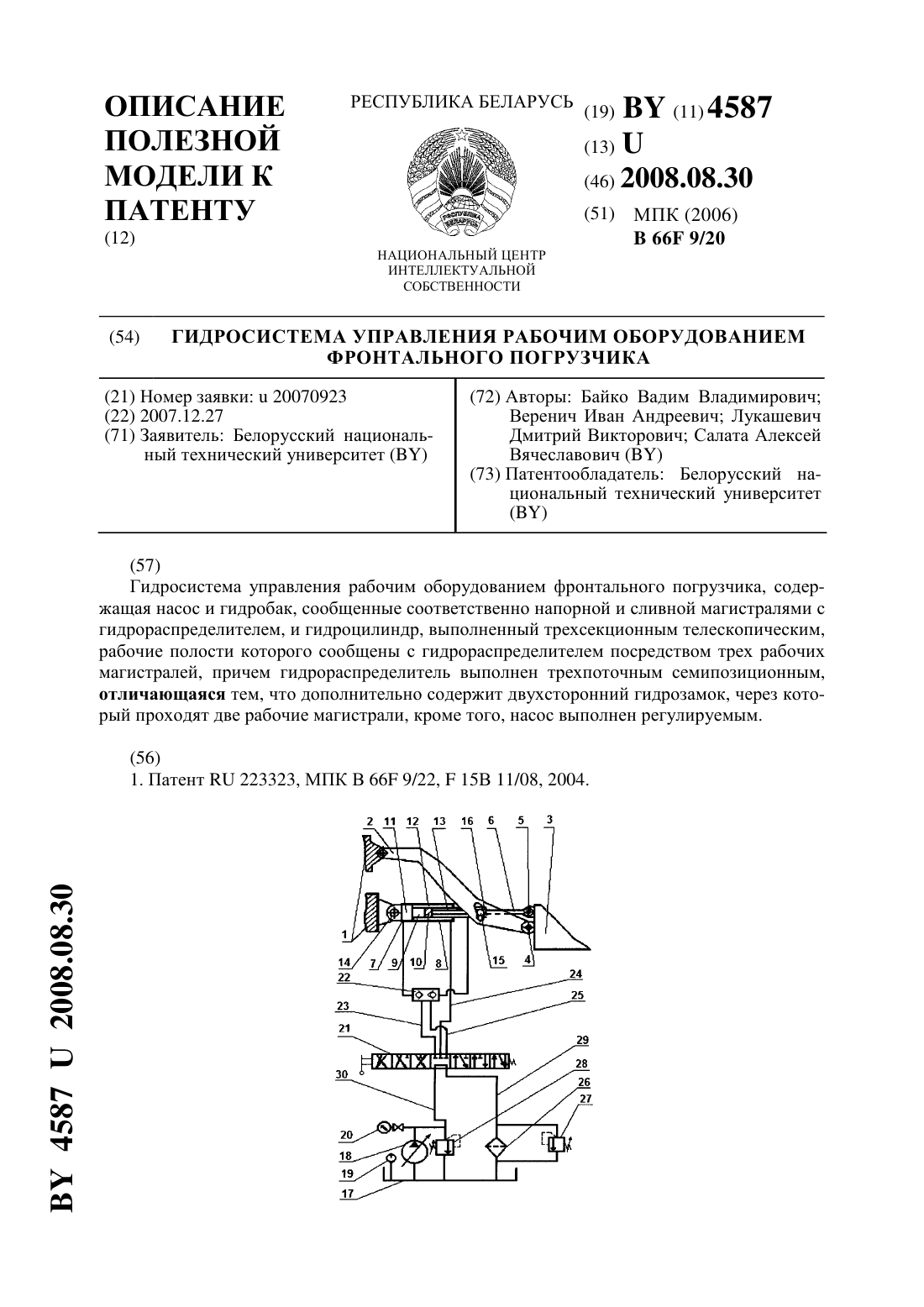
...насосом 18, термодатчик 19, манометр 20, трехпоточный семипозиционный гидрораспределитель 21, сообщенный через гидрозамок 22 рабочими магистралями 23, 24, 25 с трехсекционным телескопическим гидроцилиндром 7, фильтр 26 и предохранительные клапаны 27 и 28,установленные соответственно на сливной 29 и напорной 30 магистралях. Гидросистема управления рабочим оборудованием фронтального погрузчика работает следующим образом. В начальном цикле...
Гидросистема управления рабочим оборудованием фронтального погрузчика
Номер патента: U 4621
Опубликовано: 30.08.2008
Авторы: Сей Василий Павлович, Немаровский Юрий Васильевич
МПК: F15B 15/00, B66F 9/20
Метки: фронтального, гидросистема, рабочим, оборудованием, управления, погрузчика
Текст:
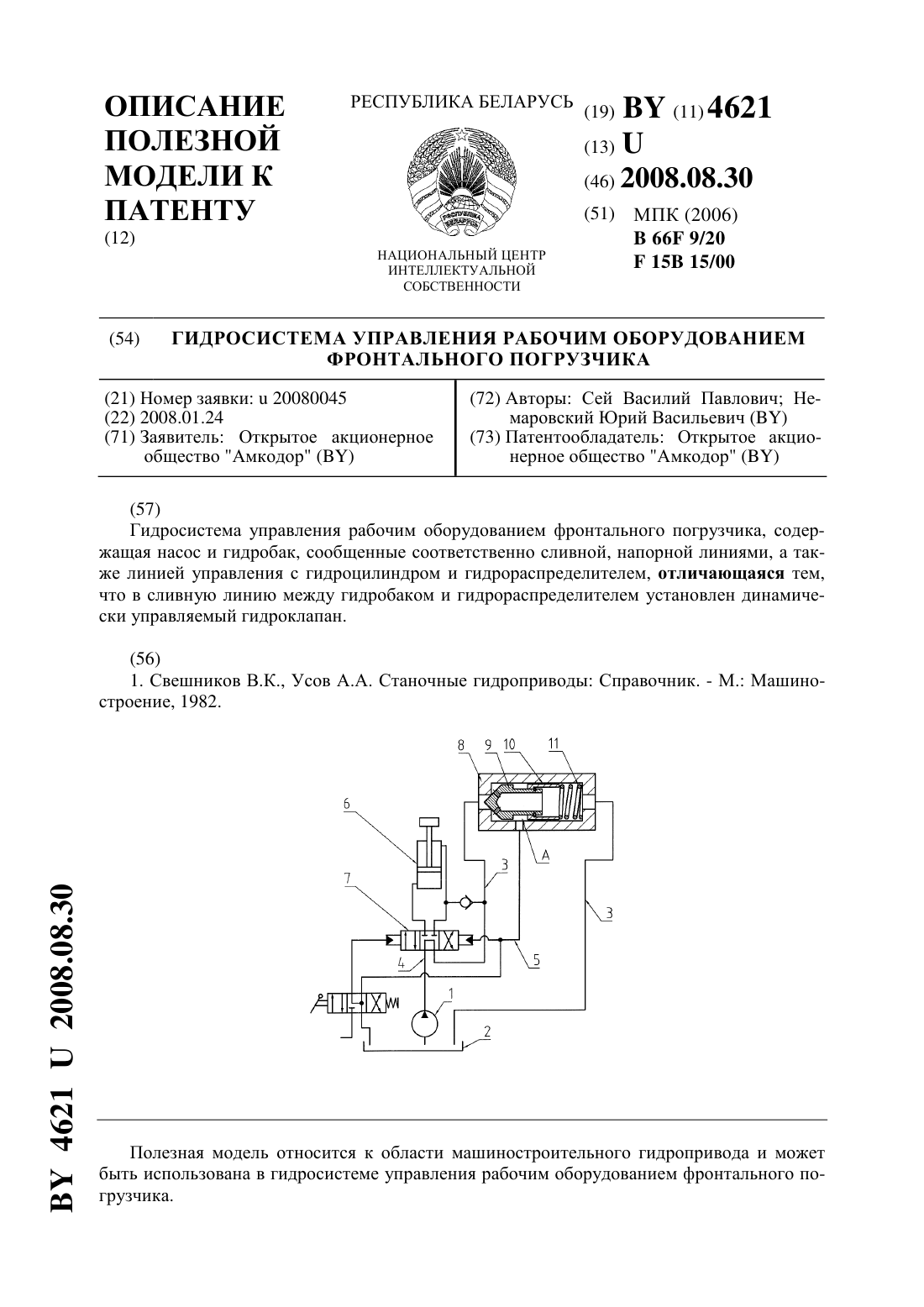
...насоса и гидроцилиндра, а также снижение шума. Гидросистема управления рабочим оборудованием фронтального погрузчика, решающая данную задачу, содержит насос и гидробак, сообщенные соответственно сливной, напорной линиями, а также линией управления с гидроцилиндром и гидрораспределителем,причем в сливную линию между гидробаком и гидрораспределителем установлен динамически управляемый гидроклапан. Сущность полезной модели поясняется...
Гидропривод одноковшового фронтального погрузчика
Номер патента: 1633
Опубликовано: 30.03.1997
Авторы: Степанович Виталий Павлович, Автушко Валентин Петрович, Барковский Александр Александрович, Смирнов Анатолий Николаевич, Метлюк Николай Федорович
Метки: погрузчика, гидропривод, одноковшового, фронтального
Текст:
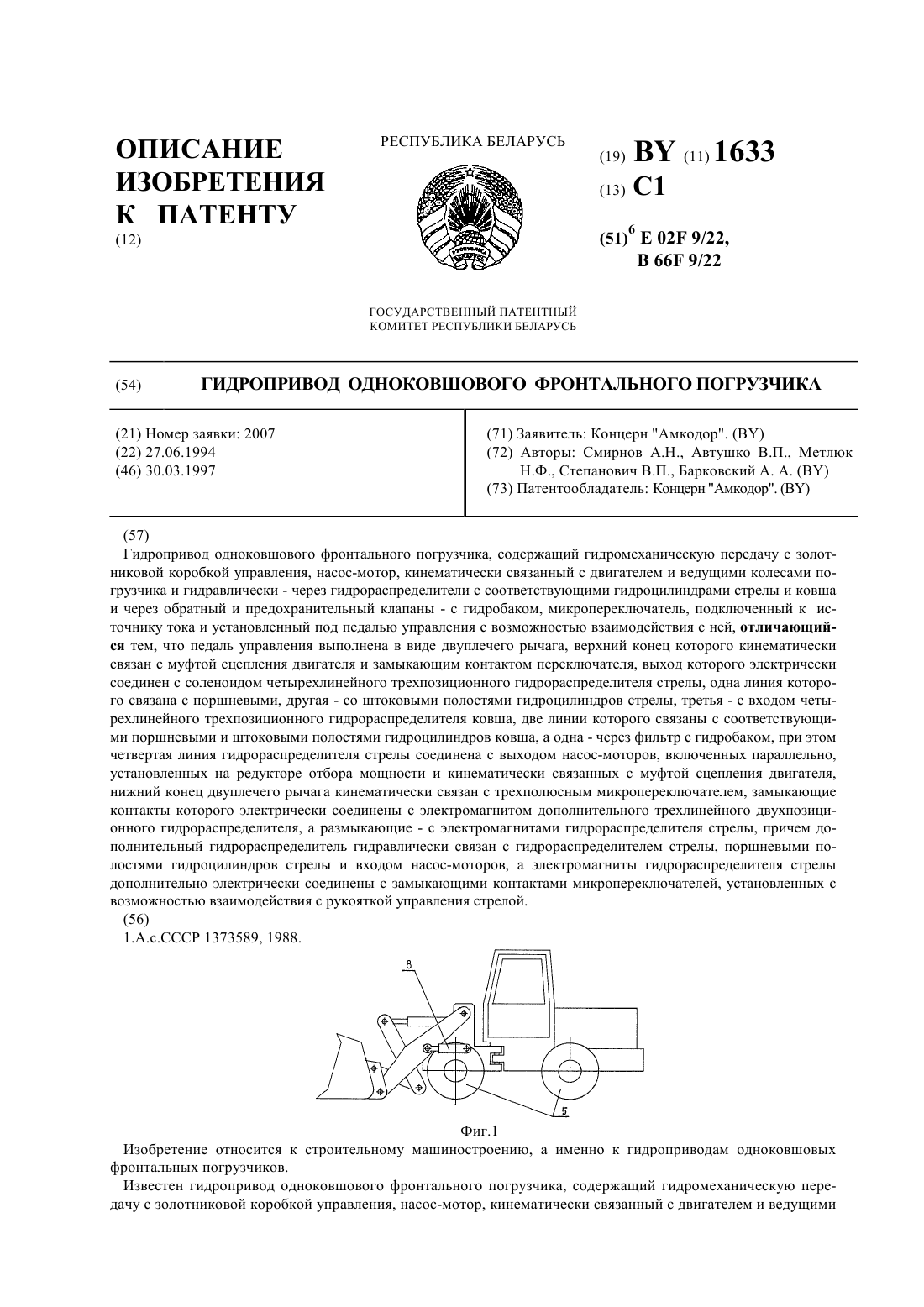
...реверсивный насос-мотор и гидропневмоаккумулятор, что упрощает конструкцию. Сущность изобретения поясняется чертежами. На фиг.1 представлен общий вид погрузчика на фиг. 2 принципиальная гидравлическая схема. Гидропривод одноковшового фронтального погрузчика содержит гидромеханическую передачу с золотниковой коробкой управления 1. Насосы-моторы 2 и 3, кинематически связанные с двигателем 4 и ведущими колесами 5 погрузчика и...
Гидросистема одноковшового фронтального погрузчика
Номер патента: 9057
Опубликовано: 30.04.2007
Авторы: Кудош Сергей Юрьевич, Щемелев Анатолий Мефодьевич, Бужинский Александр Дмитриевич
МПК: E02F 9/22
Метки: фронтального, погрузчика, гидросистема, одноковшового
Текст:
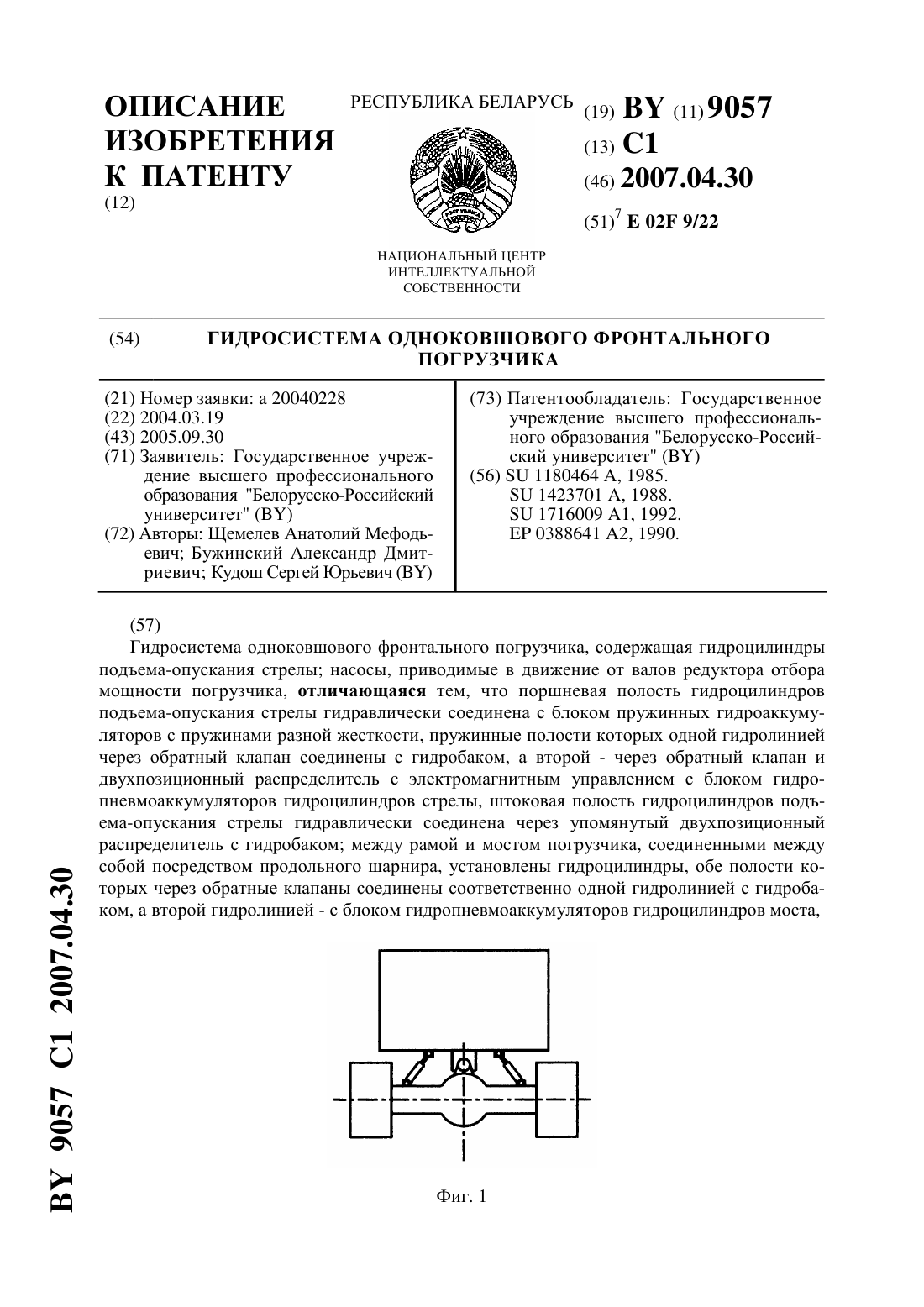
...обратного клапана, установленного в гидролинии слива, обеспечивает работу пружинных гидроаккумуляторов в режиме качающего узла, т.е. использование энергии, возникающей при перемещении машины по неровностям опорной поверхности, на закачку жидкости в гидроаккумуляторы. Соединение штоковой полости гидроцилиндров стрелы со сливом обеспечивает колебательное движение поршня и неразрывность потока в транспортном режиме движения. Установка...
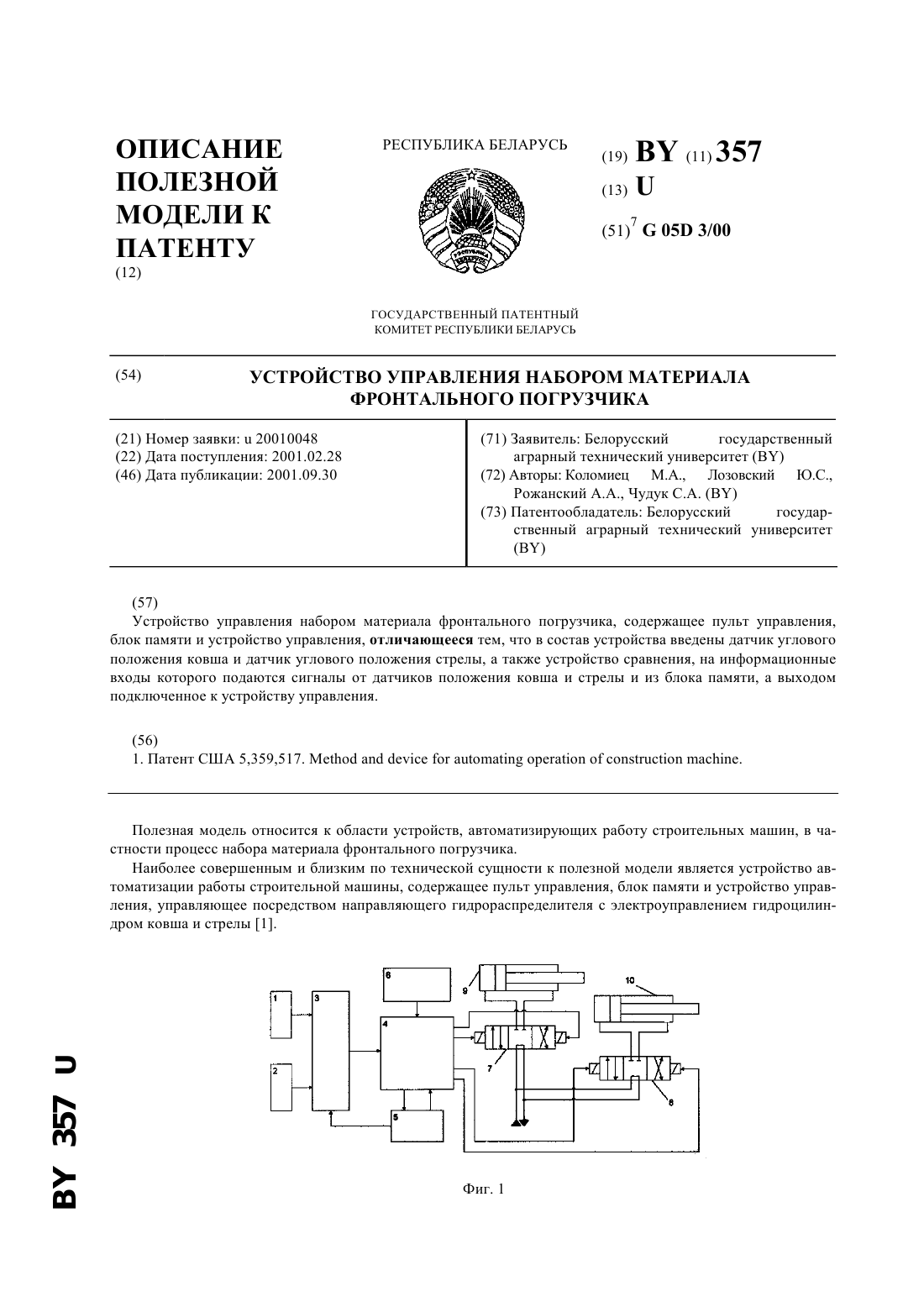
Устройство управления набором материала фронтального погрузчика
Номер патента: U 357
Опубликовано: 30.09.2001
Авторы: Лозовский Юрий Семенович, Чудук Сергей Александрович, Рожанский Альберт Анатольевич, Коломиец Михаил Антонович
МПК: G05D 3/00
Метки: набором, устройство, погрузчика, фронтального, материала, управления
Текст:
...на рис. 2 - блоксхема алгоритма его работы. Устройство содержит датчики углового положения ковша и стрелы 1 и 2, устройство сравнения 3, устройство управления 4, блок памяти 5, пульт управления 6, электроуправляемые гидрораспределители ковша и стрелы 7 и 8, гидроцилиндры ковша и стрелы 9 и 10. При этом датчики углового положения 1 и 2 служат для преобразования угла наклона рычага ковша или стрелы в аналоговый электрический сигнал, а...
Предыдущий патент: Способ коррекции оксидантного стресса в остром периоде ишемического инсульта
Следующий патент: Система очистки воздуха, поступающего в гидробак гидросистемы мобильной машины
Случайный патент: Способ получения наноразмерного порошка оксида цинка